



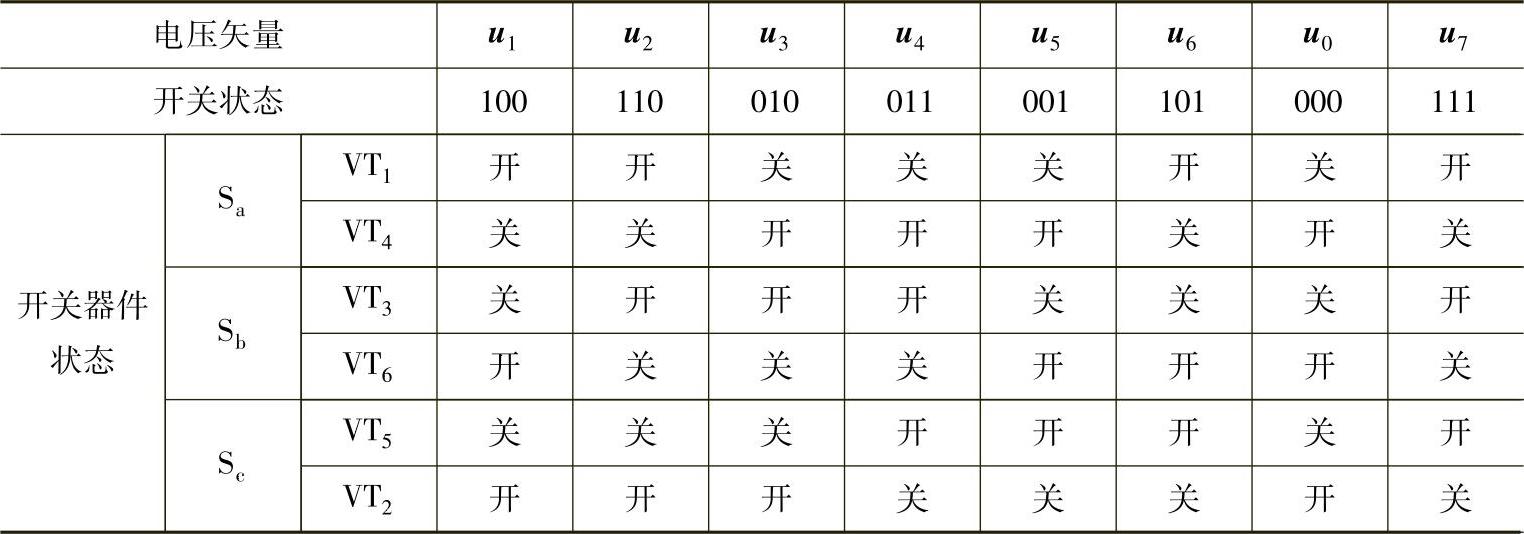
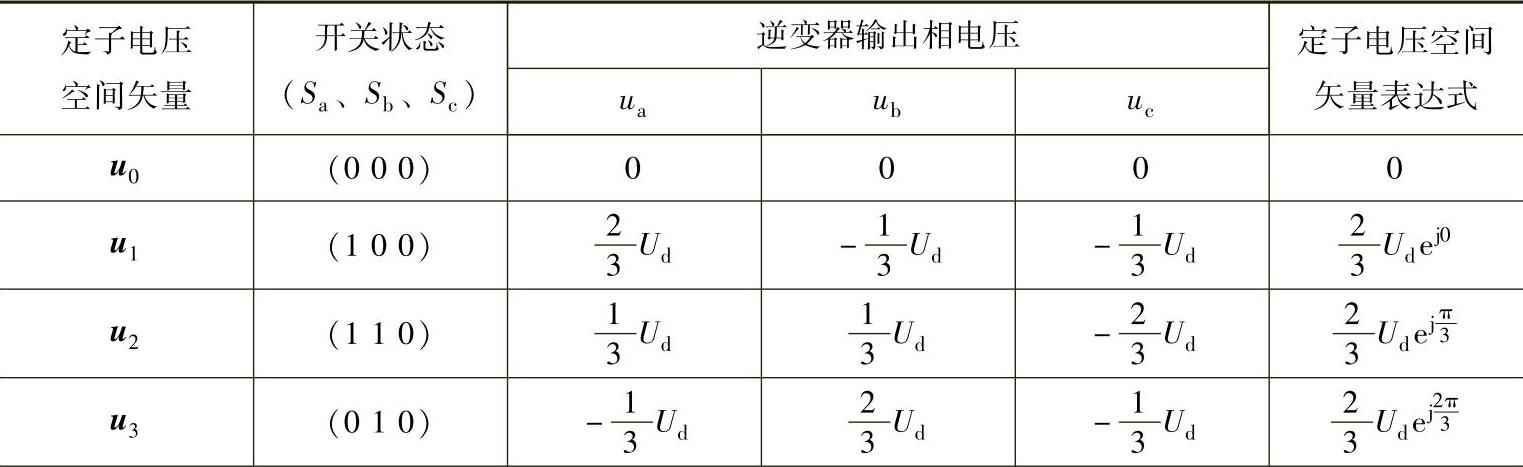
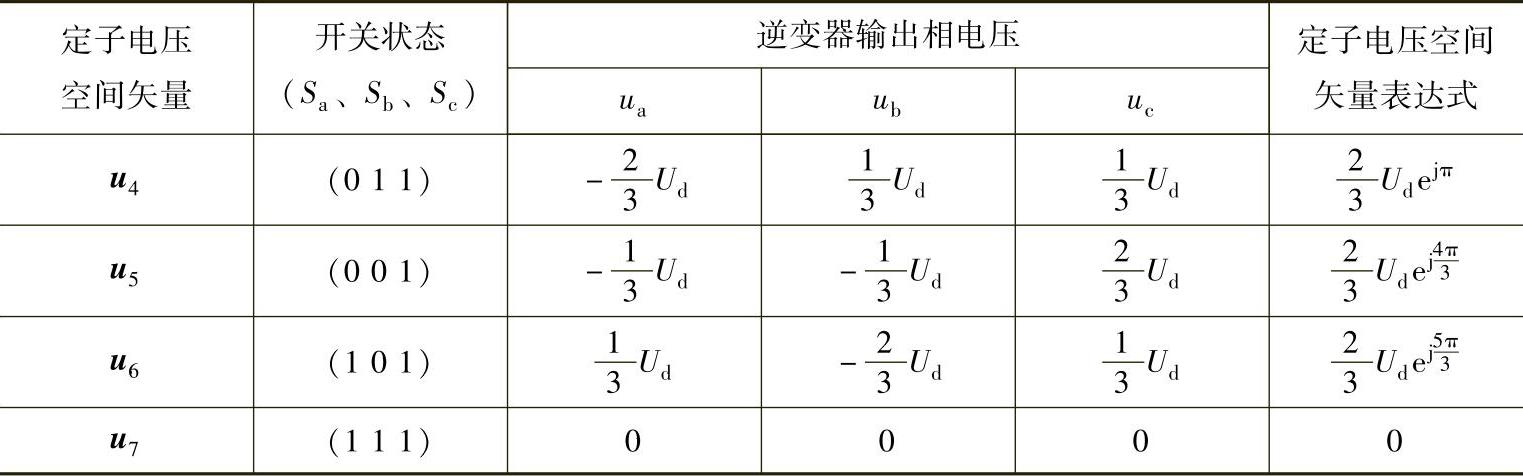
一般情况下两电平逆变器六拍运行时,每隔60°切换一次,一周内有8种开关状态。如图2-3所示,Sa、Sb、Sc为三只双投开关,往上投时相当图2-1所示电路的共阳极组IGBT导通,共阴极组关断;往下投时,情况刚好相反,共阴极组导通,共阳极组关断。若以1表示正组(共阳极组)开关导通,0表示负组(共阴极组)开关导通,运行一个周期(2π),三个开关可构成一组三位二进制编码,按a、b、c相序可表示为100、110、010、011、001、101、000、111,共计8种开关状态。每一种开关状态输出合成电压空间矢量(也简称电压矢量或空间矢量)up分别记为u1、u2、u3、u4、u5、u6、u0、u7,统称为基本矢量,它们与相应的各开关器件状态对照见表2-1。其中u1~u6为有输出数值的矢量,称为非零矢量,u0、u7无电压输出,称为零矢量。8个电压矢量的空间分布如图2-4所示,常用为辐射形式。各矢量增值角为60°,各个矢量之间可分为6个扇区(Ⅰ~Ⅵ)。若按图中电压矢量切换方向(逆时针)使电动机正转,则反方向切换(顺时针)电动机便变为反转,因为磁链和电压矢量同一方向,为了便于分析,常将ABC坐标系转换为αβ坐标系,将u1与a相、α轴重合,如图2-4所示。但应注意的是,有些文献资料上,空间电压矢量u1~u6的开关状态并不一定按上述排列表述。
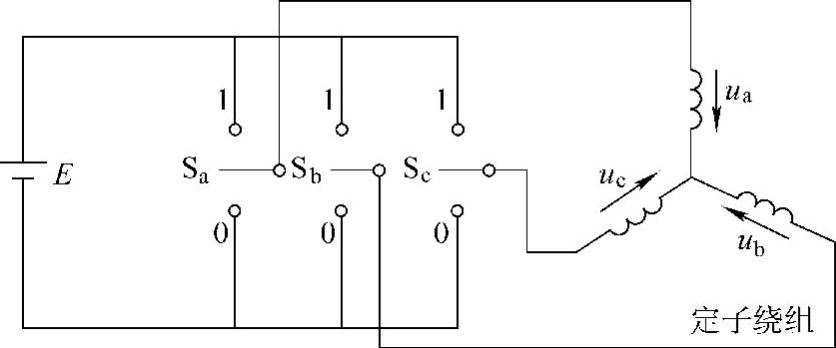
图2-3 逆变器运行示意图
表2-1 电压矢量开关状态对照表
上述逆变器输出开关状态用开关函数形式表示时
设直流电压假想中点为O,电动机绕组中点为O′(见图2-1和图2-2),两个中性点间电位差为uOO′,则加于电动机绕组相电压为ua=uA-uOO′ub=uB-uOO′uc=uC-uOO′
逆变器输出电压合成空间矢量为

式中 ρ——相量算子, 。
。
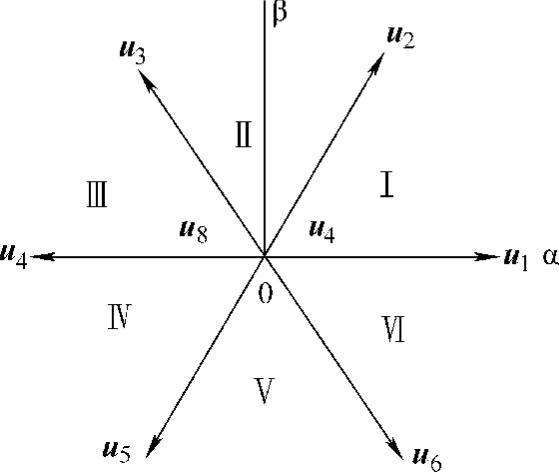
图2-4 电压空间矢量的分布
电动机定子电压合成空间矢量us为
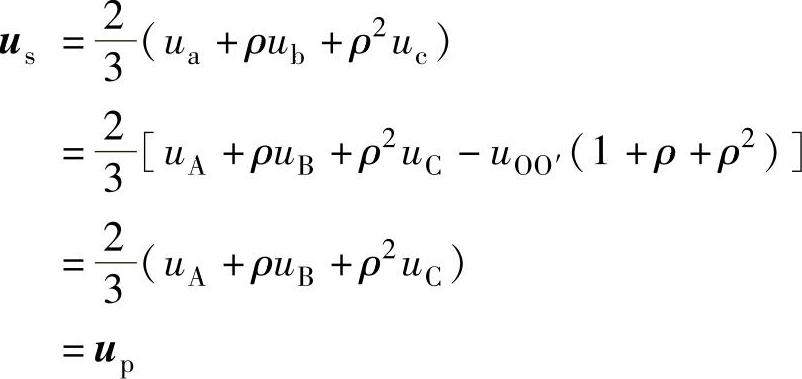
上式表明,电动机定子电压空间矢量的分析,可以转化为对逆变器输出电压空间矢量的分析。
矢量幅值 合成矢量若用开关函数表示,便有
合成矢量若用开关函数表示,便有

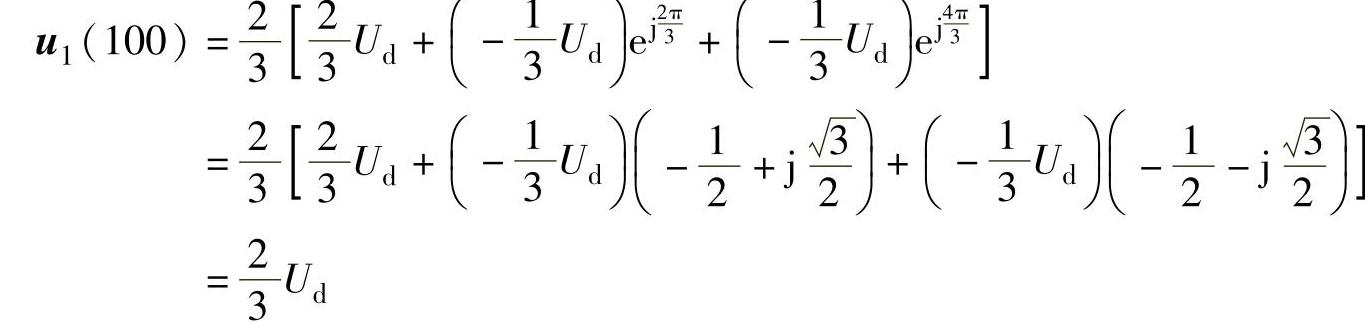
用式(2-1)可求出各电压矢量的数值,如求状态1,即u1(100):(https://www.xing528.com)
从图2-2知,相当于π/3~2π/3
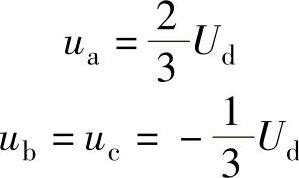
代入式(2-1),可得:
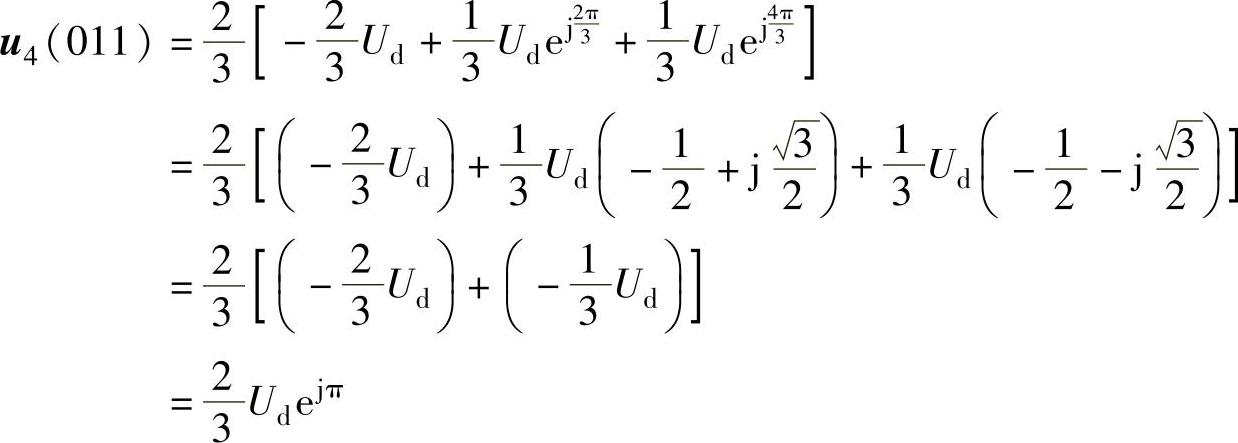
再如求u4(011),从图2-2知,相当于4π/3~5π/3
代入式(2-1),可得:
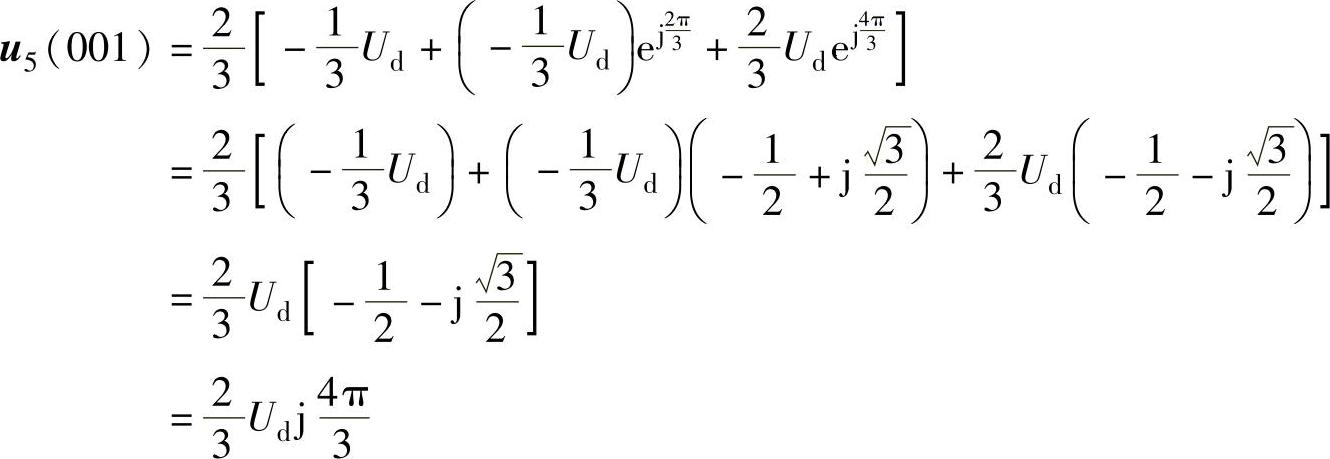
再如求u5(001),从图2-2知,相当于5π/3~2π
代入式(2-1),可得:
按此方法,可求其余电压矢量的值。各电压矢量相应的数值见表2-2。
表2-2 电压矢量相应的数值
(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。