



【摘要】:答:如图405所示,给出6×D1多孔组相对基准平面A和中间孔基准轴线B位置度公差,六孔沿基准轴线均匀分布。图405 极坐标标注的位置度误差检测1—指示器 2—被测心轴 3—基准心轴 4—被测零件 5—指示器然后任选一孔,以其中心做角向定位,测出各孔的径向误差fR和角度误差fa。必要时位置度误差可用定位最小区域法求出。当被测轴线较长时,应同时测量被测轴线的两端,并取其中较大值,作为该要素的位置度误差。
答:如图405所示,给出6×D1多孔组相对基准平面A和中间孔基准轴线B位置度公差,六孔沿基准轴线均匀分布(图405a)。
检测时,将基准心轴3无间隙配合地装入基准孔B中,同时装到分度装置上,调整被测零件4使基准轴线与分度装置回转轴线同轴。在被测孔内无间隙配合装入被测心轴2,以该心轴模拟被测轴线(图405b)。
表40 坐标位置偏差fx、fy与位置度误差f换算表 (单位:μm)
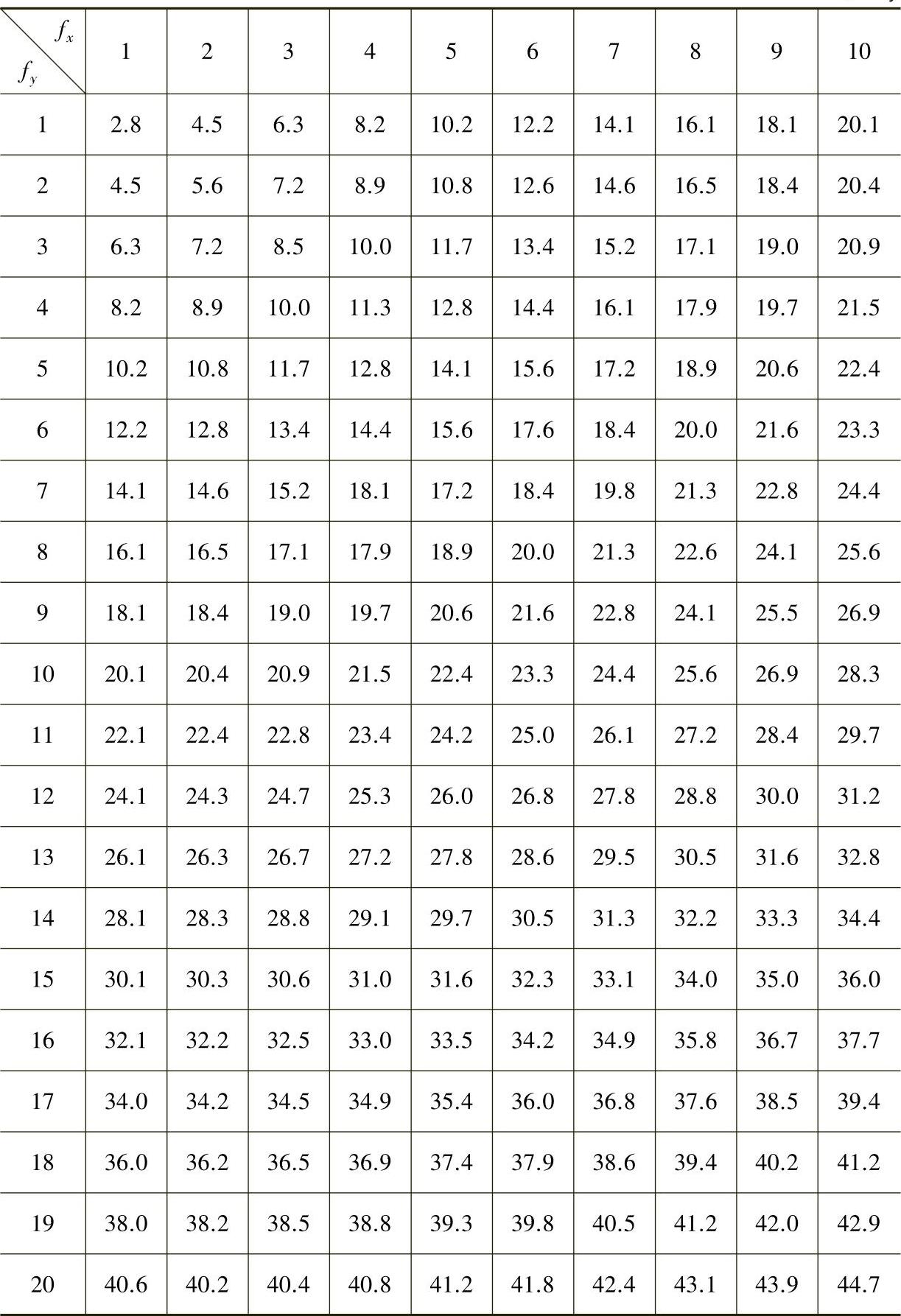
说明:表中的fx、fy值如需以0.01mm或0.1mm分段,只需将表中数值除以10或100即可。
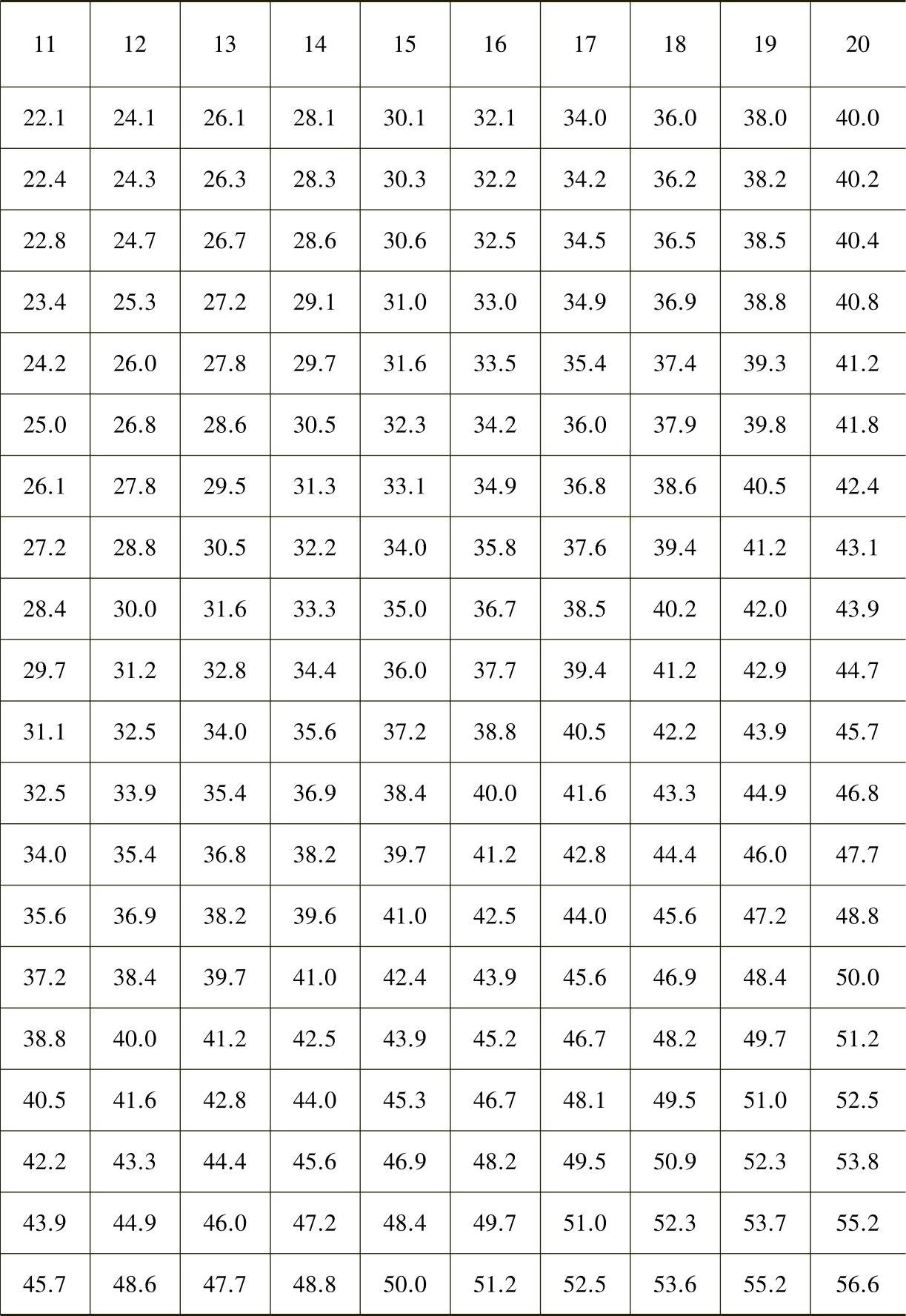
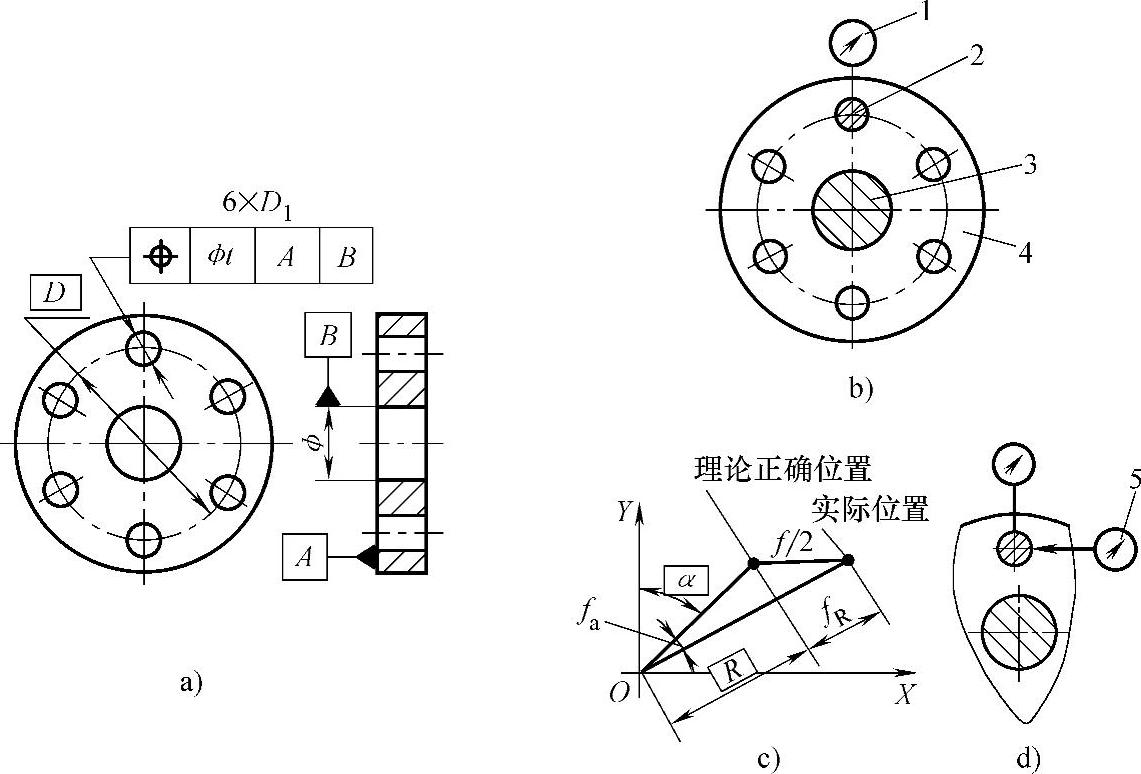
图405 极坐标标注的位置度误差检测(https://www.xing528.com)
1—指示器 2—被测心轴 3—基准心轴 4—被测零件 5—指示器
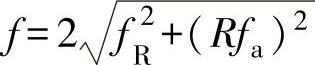
然后任选一孔,以其中心做角向定位,测出各孔的径向误差fR和角度误差fa(取弧度值,图405c)。按下式求得各孔位置度误差,即
式中,fR是根据各被测孔中心到基准孔中心的理论正确尺寸D/2与被测心轴半径之和作为零位,由指示器1沿径向测得变动量。fa则是由一孔为基准定位,各孔轴线相对理论正确角度60°(图中可省略不标注)由分度装置测得。
该零件也可用两指示器分别测出各孔径向误差fy和切向误差fx(图405d),按公式 求得位置度误差。
求得位置度误差。
必要时位置度误差可用定位最小区域法求出。
当被测轴线较长时,应同时测量被测轴线的两端,并取其中较大值,作为该要素的位置度误差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。