



(1)为了更清楚地看见各种标记,在Settings菜单选择Icons,在Size for all Model Icons项中的New Size栏输入0.2,如图4-31所示,设置完毕单击OK按钮。
(2)在wheel与大地间建立旋转铰接副。在主工具箱中的连接工具集中,选择旋转铰接副 ,并设置参数:1 Location,Normal to Grid。在窗口内选择Point_1点,建立旋转副,如图4-32所示,系统自动命名为Joint_1。
,并设置参数:1 Location,Normal to Grid。在窗口内选择Point_1点,建立旋转副,如图4-32所示,系统自动命名为Joint_1。
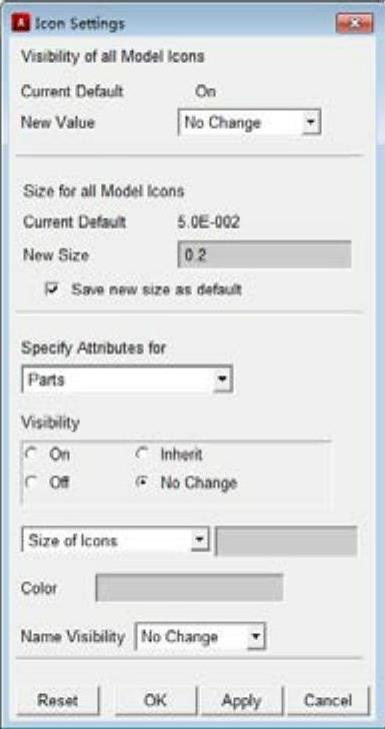
图4-31 设置Icon大小
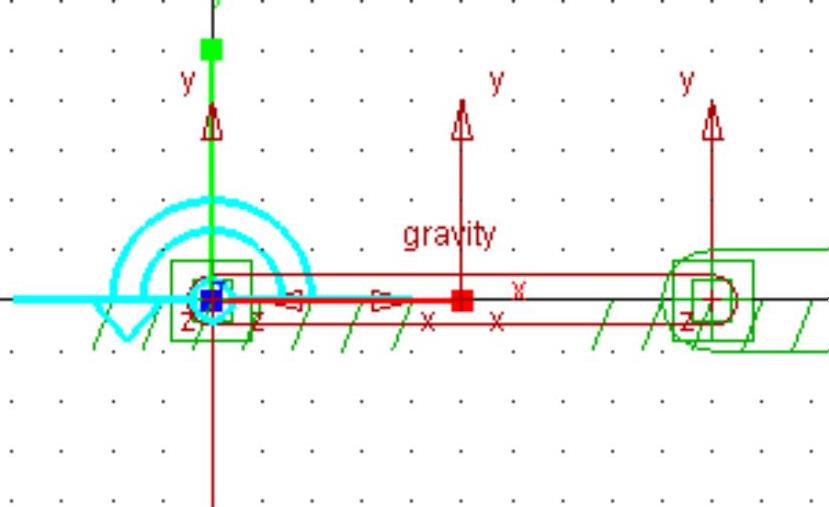
图4-32 建立铰接副
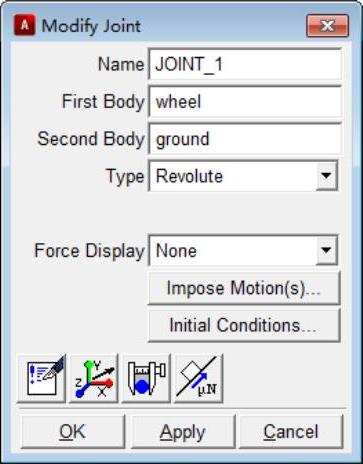
(3)鼠标右键单击Joint_1,在弹出的菜单中选择Joint_1->Modify,在修改对话框中确认连接的两个物体是wheel和ground,如图4-33所示。
(4)在wheel与handle间建立一铰接副。在主工具箱中的连接工具集中,选择旋转铰接副 ,并设置参数:2Body-1Loc,Normal to Grid。用鼠标首先选择wheel,再选择handle,然后选择Point_2,建立旋转副,系统自动命名为Joint_2。
,并设置参数:2Body-1Loc,Normal to Grid。用鼠标首先选择wheel,再选择handle,然后选择Point_2,建立旋转副,系统自动命名为Joint_2。
(5)在handle与piston间建立一铰接副。在主工具箱中的连接工具集中,选择旋转铰接副 ,并设置参数:2 Body-1 Loc,Normal to Grid。用鼠标首先选择handle,再选择piston,然后选择Point_3,建立旋转副,系统自动命名为Joint_3,如图4-34所示。
,并设置参数:2 Body-1 Loc,Normal to Grid。用鼠标首先选择handle,再选择piston,然后选择Point_3,建立旋转副,系统自动命名为Joint_3,如图4-34所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-33 铰接副修改对话框
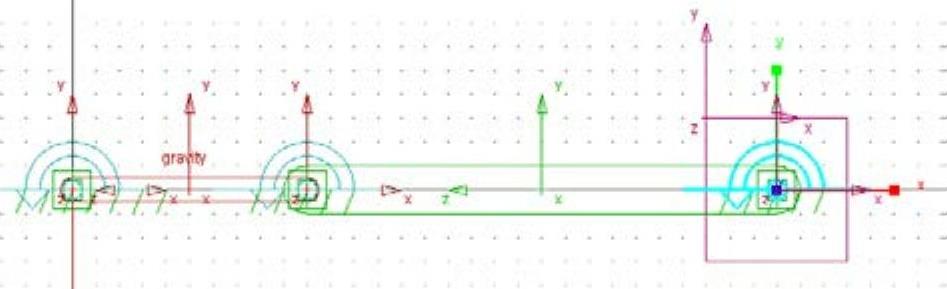
图4-34 建立铰接副
(6)设定滑块只能水平移动。在主工具箱中选择移动副工具按钮 ,设置参数:2Bod-1 Loc,Pick Feature,依次选择piston和大地(即窗口内空白位置处),并沿水平方向定义运动箭头,建立移动副,如图4-35所示。
,设置参数:2Bod-1 Loc,Pick Feature,依次选择piston和大地(即窗口内空白位置处),并沿水平方向定义运动箭头,建立移动副,如图4-35所示。
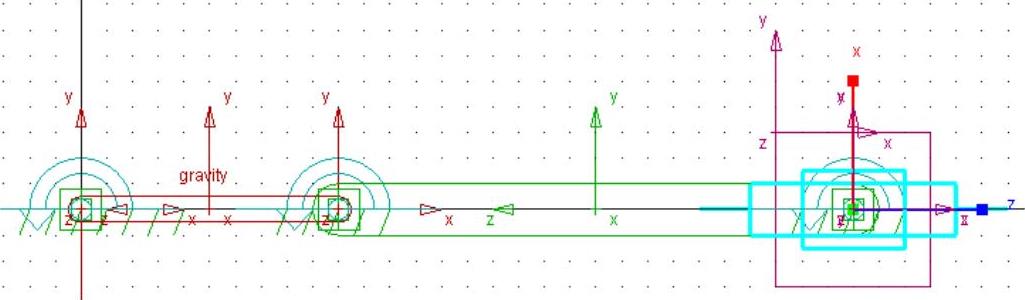
图4-35 建立移动副
(7)给曲柄添加运动约束,使之逆向360º旋转。在主工具箱中选择旋转运动工具按钮 ,设置参数:在speed栏输入360.0,即每秒转动360º。选择Joint_1,建立旋转运动,窗口内出现标志转动的大箭头,如图4-36所示。
,设置参数:在speed栏输入360.0,即每秒转动360º。选择Joint_1,建立旋转运动,窗口内出现标志转动的大箭头,如图4-36所示。
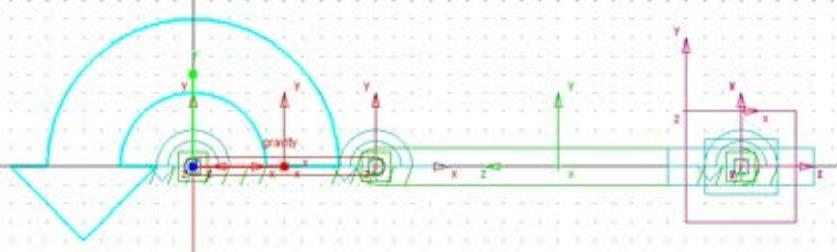
图4-36 建立旋转运动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。