



齿轮副由两个齿轮、一个连接支架和两个约束组成,如图4-2所示。齿轮副通过一个公共速度标记点建立起了3个构件和两个约束之间的运动关系。
公共速度标记点在支架上,为两齿轮接触点,它的z轴方向定义了齿轮啮合点的速度和啮合力的方向。公共速度标记点到两个约束的距离决定了齿轮的传动比。
齿轮副中的约束可以为旋转副、移动副或圆柱副,可以选择不同类型的连接,模拟不同的齿轮连接形式,如直齿圆柱齿轮、斜齿轮、行星齿轮、锥齿轮、齿条齿轮等。
创建齿轮副的方法如下:
(1)创建两个构件作为齿轮,并在齿轮上施加约束。
(2)在主工具箱中的几何建模工具集中选择标记点图标 ,作为公共速度标记点。注意:公共速度标记点应建在连接支架上,并且标记点的z轴方向应该指向齿轮副啮合点的运动方向。
,作为公共速度标记点。注意:公共速度标记点应建在连接支架上,并且标记点的z轴方向应该指向齿轮副啮合点的运动方向。
(3)在主工具箱中的约束工具集中选择齿轮副图标 ,显示齿轮副对话框,如图4-3所示。
,显示齿轮副对话框,如图4-3所示。
设置创建齿轮副的各项参数:
●在Gear Name栏,输入或修改齿轮副名称。
●在Adams Id栏,输入齿轮副的整数标号。(https://www.xing528.com)
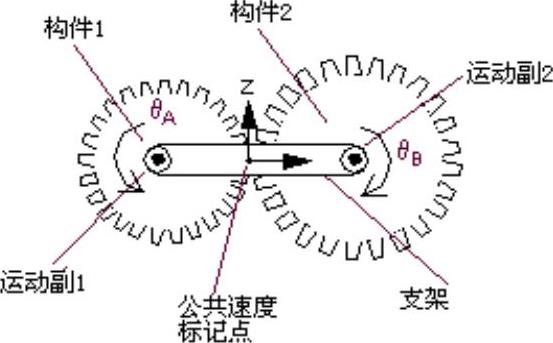
图4-2 齿轮副
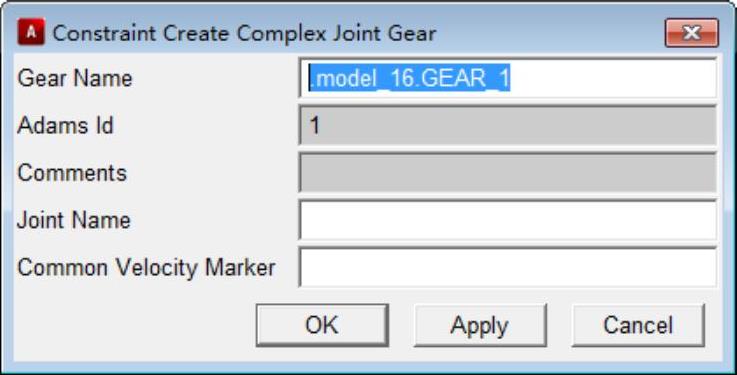
图4-3 齿轮副对话框
●在Comments栏,可以输入有助于管理的任何注释内容。
●在Joint Name栏,输入齿轮副的两个约束的名称,ADAMS/View自动在两个名称之间添加一个“,”号。也可以选择约束,在输入文本框中单击鼠标右键,在弹出式菜单中选择“Pick”,然后拾取约束。
●在Common Velocity Marker栏,输出齿轮副的公共速度标记点名称,也可以采取与选择约束同样的方式选择标记点。如果没有公共速度标记点,可以用鼠标右键显示弹出式菜单,从中选择Create命令,可以产生一个新的标记点。
(4)单击OK按钮,完成齿轮副创建。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。