



在工程应用中,一般性的非线性规划问题通常采用两类方法进行求解:
1.梯度法,如最速下降法。
2.迭代法,如逐次二次规划法。
在无约束系统中,通常求解函数f(x)最小化问题的方法是令函数的导数为零,然后根据导数方程求解出系统的状态。然而,对于大多数应用,在无约束最小化条件下得到的系统状态将不能满足约束方程。因此,需要寻找一种替代的方法来求解带约束的最小化问题。其中的一种方法是引入附加的参数集λ,通常被称为Lagrange乘子,将约束条件加入到费用函数中。这样,增广后的费用函数变为
最小化 f(x)-λc(x) (6.91)
式(6.91)的增广函数最小化问题,可以通过令增广函数的导数为零进行求解。注意,式(6.91)关于λ的导数,所得到的就是式(6.64)的等式约束。
例6.7 最小化

约束条件为
2x-y=5
解6.7 注意,要使其最小化的函数是一个圆的方程。此函数的无约束最小值在原点x=0和y=0上取到,意味着此圆的半径为零。然而,加上约束条件后,此圆必须与给定的直线相交,因此,此圆的半径不能为零。增广的费用函数变为

式中,λ表示Lagrange乘子。令增广费用函数的导数为零,得到如下方程组:
求解此方程组得到[xyλ]T=[2 -1 1]T。在增广费用函数取到最小值的点上,费用函数式(6.92)的值为

费用函数f和约束方程c也可能是某个外部输入u的函数,在最小化函数f(x)的过程中,u是可变的。在这种情况下,式(6.91)可以更一般地表示为
最小化f(x,u)-λc(x,u) (6.94)
如果等式约束超过一个,那么λ就变为一个乘子向量,增广费用函数变为
C∗:f(x)-[λ]Tc(x) (6.95)式中,C∗的导数变为
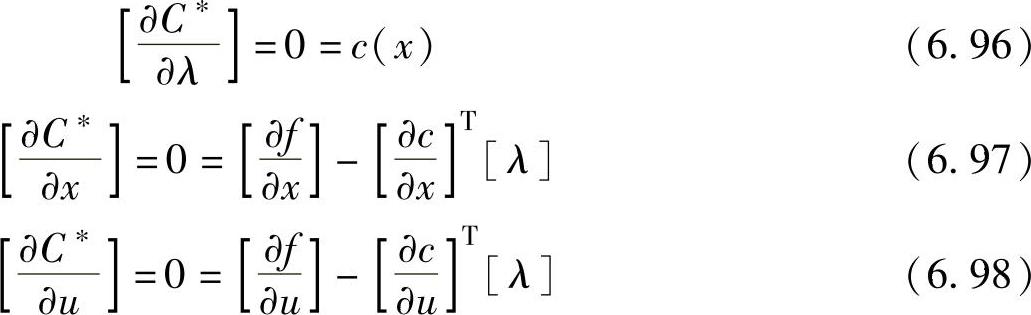
注意,对任何满足等式约束的可行解,都满足式(6.96);但可行解不一定是使费用函数最小化的最优解。在这种情况下,[λ]可以从式(6.97)中得到,
且只有
这个向量可以被用作梯度向量[ C],它和费用函数C的等值线正交。这样
C],它和费用函数C的等值线正交。这样

而

上述方法给出了此优化算法的基础,此优化算法被称为最速下降法。
最速下降法的步骤
1.令k=0。给定一个初始向量uk=u0。
2.求解式(6.96)(可能是非线性的),得到可行解x。
3.根据式(6.101)计算Ck+1和 Ck+1。若‖Ck+1-Ck‖小于事先设定的误差,则停止。
Ck+1。若‖Ck+1-Ck‖小于事先设定的误差,则停止。
4.计算新的向量uk+1=uk-γ C,其中γ是用户设定的大于零的算法步长。
C,其中γ是用户设定的大于零的算法步长。
5.k=k+1。返回步骤2。
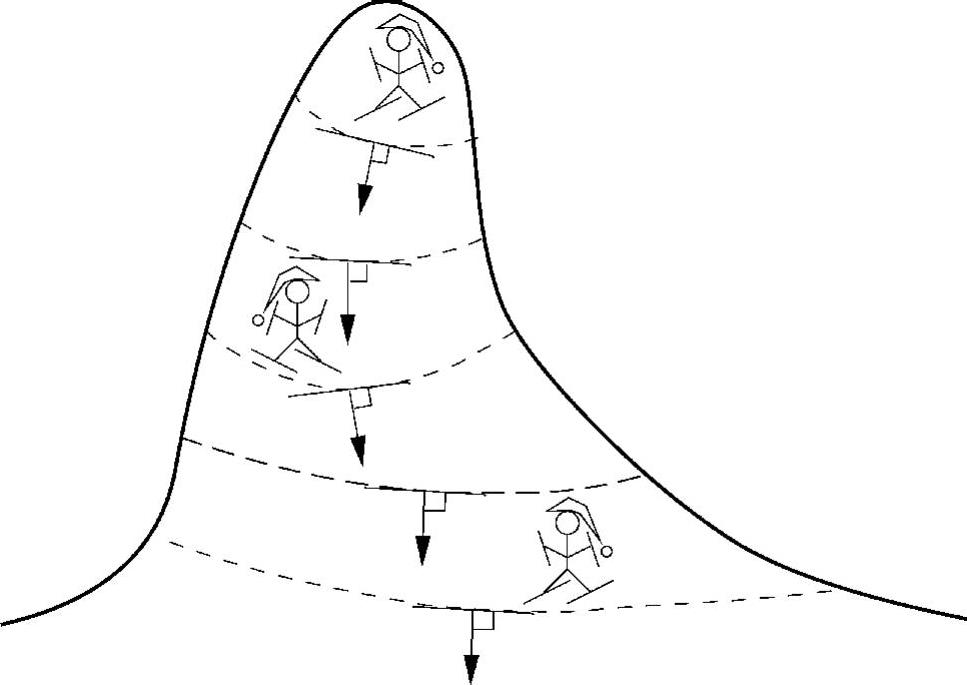
图6.4 最速下降法的例子
在最速下降法中,每一步都要确定向量u的移动方向,该方向就是增广费用函数C∗变化最快的方向。例如,考虑一个人从山顶滑雪至山脚,如图6.4所示。滑雪者会在某一段路径上直线前进。在此点上,他也许并不是直指山下滑行的。因此。他会不断调整,以使自己朝着最速下降的方向前进。最速下降的方向与等高线(即费用)的切线垂直。滑雪者每次调整方向间的移动距离与算法中的步长γ是类似的。当γ较小时,滑雪者会频繁地改变方向,这样,他的下降速度不高。而当γ较大时,他可能会越过山脚重新上坡。因此,最速下降法的关键在于γ的选择。如果γ选得小,算法更容易收敛到最小值,但需要更多的迭代次数。相反地,大的γ会导致在最小值附近振荡。
例6.8 最小化
C:x21+2x22+u2=f(x1,x2,u) (6.102)
约束条件为(https://www.xing528.com)
0=x21-3x2+u-3 (6.103)
0=x1+x2-4u+2 (6.104)
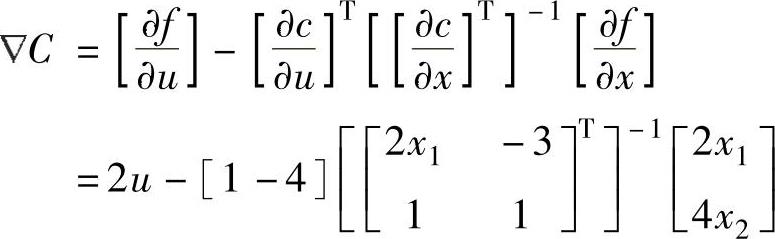
解6.8 为了求解式(6.101)的 C,需要如下的偏导数:
C,需要如下的偏导数:

可以得到
迭代1
令u=1,γ=0.05,选择停止迭代的准则为∈=0.0001。求解x1和x2,得到两组解及其对应的费用函数:
x1=1.7016 x2=0.2984 f=4.0734
x1=-4.7016 x2=6.7016 f=23.2828
第1组解得到了费用函数的极小值,因此被选择为工作解。将x1=1.7016,x2=0.2984代入到梯度函数中,得到 C=10.5705,u的新值变为
C=10.5705,u的新值变为
u(2)=u(1)-γ C
C
=1-(0.05)(10.5705)
=0.4715
迭代2
取u=0.4715,再次求解x1和x2,得到两组解及其对应的费用函数:
x1=0.6062 x2=-0.7203 f=1.6276
x1=-3.6062 x2=3.4921 f=14.2650
第1组解再次得到了费用函数的极小值,因此被选择为工作解。费用函数的差为
|C(1)-C(2)|=|4.0734-1.6276|=2.4458大于迭代停止准则。将这些值代入到梯度函数中,得到 C=0.1077,u的新值变为
C=0.1077,u的新值变为
u(3)=u(2)-γ C
C
=0.4715-(0.05)(0.1077)
=0.4661
迭代3
取u=0.4661,再次求解x1和x2,得到两组解及其对应的费用函数:
x1=0.5921 x2=-0.7278 f=1.6271
x1=-3.5921 x2=3.4565 f=14.1799
第1组解再次得到了费用函数的极小值,因此被选择为工作解。费用函数的差为
|C(2)-C(3)|=|1.6276-1.6271|=0.0005
大于迭代停止准则。将这些值代入到梯度函数中,得到 C=0.0541,u的新值变为
C=0.0541,u的新值变为
u(4)=u(3)-γ C
C
=0.4661-(0.05)(0.0541)
=0.4634
迭代4
取u=0.4634,再次求解x1和x2,得到两组解及其对应的费用函数:
x1=0.5850 x2=-0.7315 f=1.6270
x1=-3.5850 x2=3.4385 f=14.1370
第1组解再次得到了费用函数的极小值,因此被选择为工作解。费用函数的差为
|C(3)-C(4)|=|1.6271-1.6270|=0.0001
满足迭代停止准则。因此,问题的解为x1=0.5850,x2=-0.7315,u=0.4634,而费用函数的最小值为f=1.6270。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。