



Gauss消去法的向前消去过程产生了一系列与矩阵A相关的上三角矩阵和下三角矩阵,如式(2.9)所示。其中,矩阵W是一个下三角矩阵,而矩阵U是一个对角元为1的上三角矩阵。考虑到下三角矩阵的逆仍然是一个下三角矩阵,因此如果定义
L=≜W-1
那么
A=LU
正是基于矩阵L和矩阵U,将矩阵的因子分解或消去算法命名为矩阵的“LU分解”。事实上,对于任何非奇异的矩阵A,存在一些置换矩阵P(有可能P=I),使得
LU=PA (2.18)
式中,U是对角元为1的上三角矩阵,L是对角元为非零的下三角矩阵,而P是由单位矩阵I通过行交换或列交换而形成的元素仅为0或1的矩阵。一旦选定一个合适的矩阵P,那么上述的LU分解就是唯一的[6]。如果P、L和U已经确定,那么方程组
Ax=b (2.19)
就可以迅速得到求解。在式(2.19)两边同时左乘矩阵P得
PAx=Pb=b′ (2.20)
LUx=b′ (2.21)
式中,b′仅仅是对向量b的一个重新排列。如果引入一个“哑”向量y,使得
Ux=y (2.22)
那么
Ly=b′ (2.23)
考虑到式(2.23)的结构为
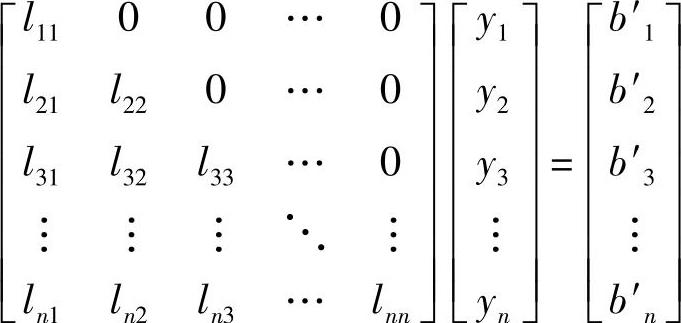
向量y的元素可以通过直接代换得到:
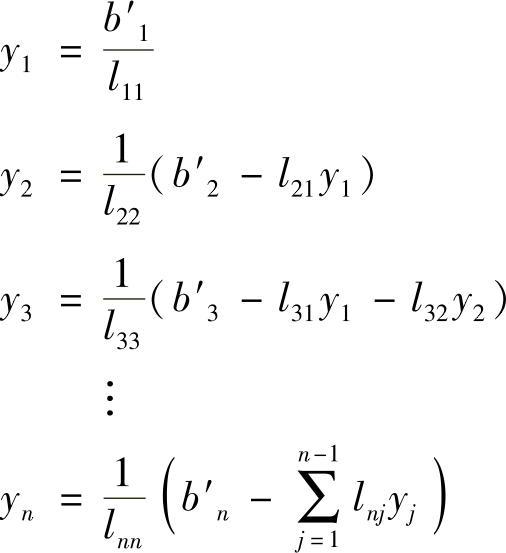
求出y以后,x就可以很容易根据如下方程求得:
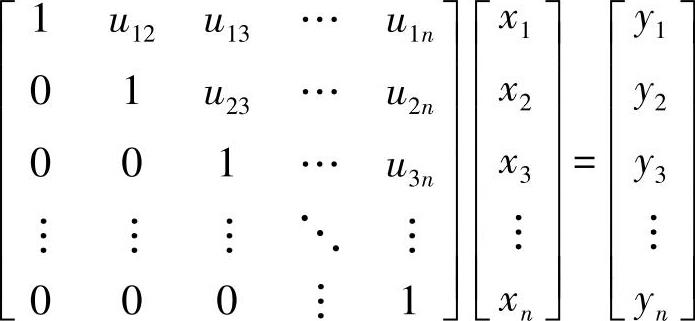
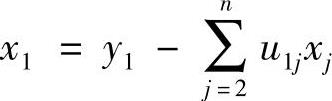
类似地,解向量x可以通过回代得到:
xn=yn
xn-1=yn-1-un-1,nxn
xn-2=yn-2-un-2,nxn-un-2,n-1xn-1
︙
LU分解的价值在于,一旦矩阵A被分解成上三角矩阵和下三角矩阵,那么寻找解向量x就是一件直截了当的事了。注意上述求解过程并没有显式地对矩阵A求逆。
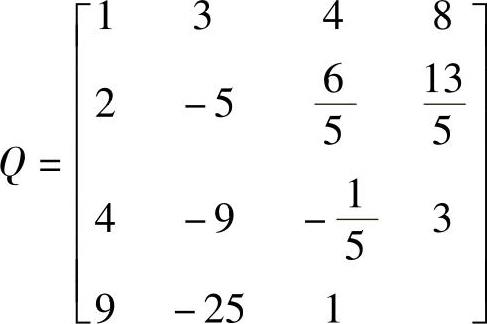
存在多种方法对矩阵进行LU因子分解,每种方法具有各自的优缺点。一种常用的LU分解方法被称为Croutb算法[6]。定义矩阵Q为
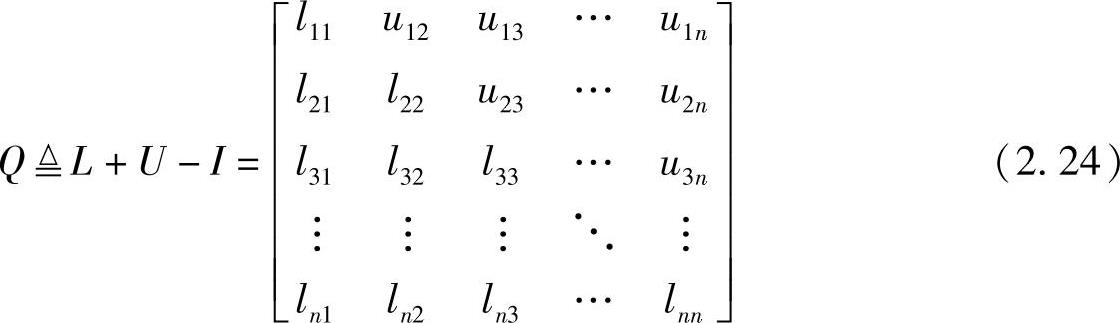
Crout算法逐列逐行地计算Q的元素,首先计算Q的列元素,然后计算Q的行元素,如图2.1所示。Q中的每个元素qij只依赖于A的元素aij和前面已经计算得到的Q的元素。
对矩阵A进行LU分解的Crout算法
(1)对矩阵Q进行初始化,即清零,并令j=1;
(2)根据下式计算Q的第j列(即矩阵L的第j列):
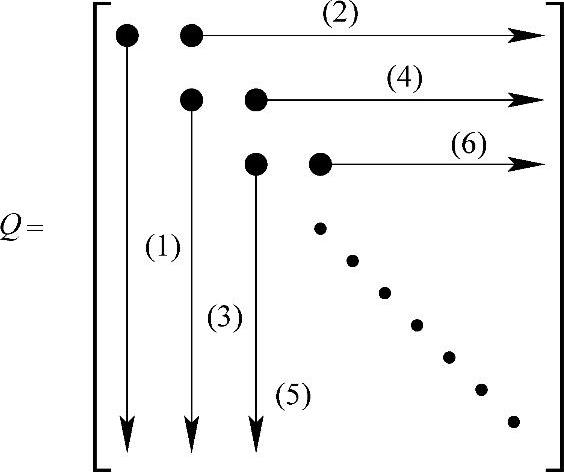
图2.1 矩阵Q列和行元素的计算次序

(3)如果j=n,则停止;
(4)假定qjj≠0,根据下式计算Q的第j行(即矩阵U的第j行):

(5)令j=j+1,转到步骤(2)。
一旦完成LU分解,通过“前代”就能得到哑向量y:

类似地,通过“回代”就能得到解向量x:

衡量LU分解过程计算量的一种指标是,获得解向量所需要的乘法和除法运算次数,因为两者都是浮点数运算。计算Q的第j列(L的第j列)需要的乘法和除法次数为
 (https://www.xing528.com)
(https://www.xing528.com)
类似地,计算Q的第j行(U的第j行)需要的乘法和除法次数为
前代所需要的乘法和除法次数为
回代所需要的乘法和除法次数为
这样,可以算出LU分解所需要的乘法和除法次数为
而前代和回代所需要的乘法和除法次数为n2。因此,求解式(2.1)线性方程组所需要的总的乘法和除法次数为

将这个乘除法次数与采用Cramer法则所需要的2(n+1)!次乘除法相比,对于任何较大阶数的矩阵,显然采用LU分解和前代/回代方法的计算效率要高得多。
例2.3 采用LU分解和前代/回代算法,求解例2.2中方程的解。
解2.3 第1步是求矩阵A的LU因子:
从j=1开始,式(2.25)表示Q的第1列与A的第1列完全相同。类似地,根据式(2.26),Q的第1行变为

这样,对于j=1,矩阵Q变为
对于j=2,将分别计算矩阵Q主对角元下面的列元素和右面的行元素。对于Q的第2列有
q22=q22-q21q12=1-(2)(3)=-5
q32=a32-q31q12=3-(4)(3)=-9
q42=a42-q41q12=2-(9)(3)=-25
Q中的每个元素通过A中的对应元素和Q中已经求得的元素得到。注意乘积的第2个下标总是相同的,而第1个下标与正要计算的元素下标相同。这个规则对于列计算和行计算都是成立的。Q的第2行计算如下:
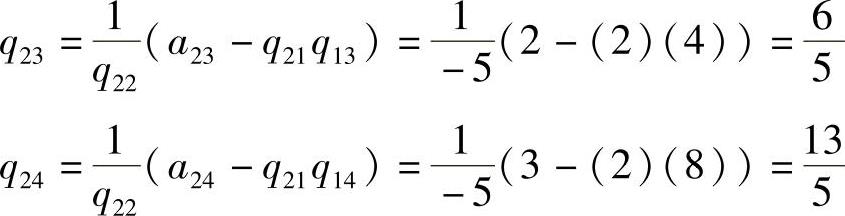
对j=2处理完以后,矩阵Q变为
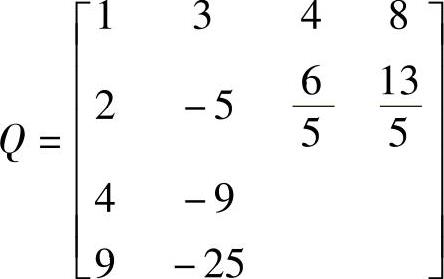
继续计算j=3,Q的第3列计算如下:

而Q的第3行变为
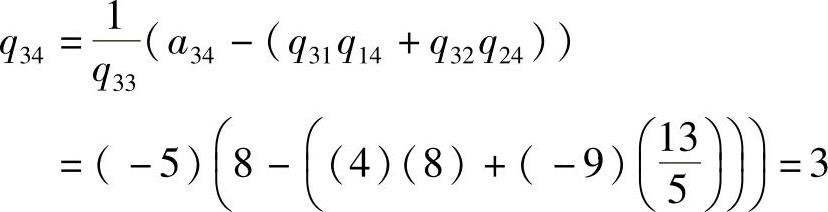
得到
最后,计算j=4,最后一个对角元为

这样,
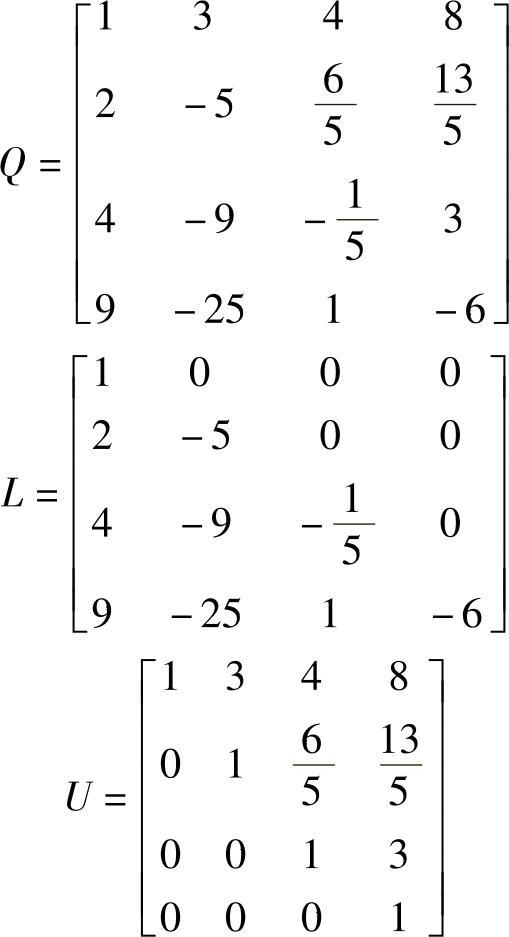
检查上述计算是否正确的一种方法是验证LU是否等于A,对于本例,结果是成立的。
一旦求得了矩阵LU,下一步就是基于矩阵L和向量b通过前代来计算哑向量y,采用前代解方程Ly=b得到y为
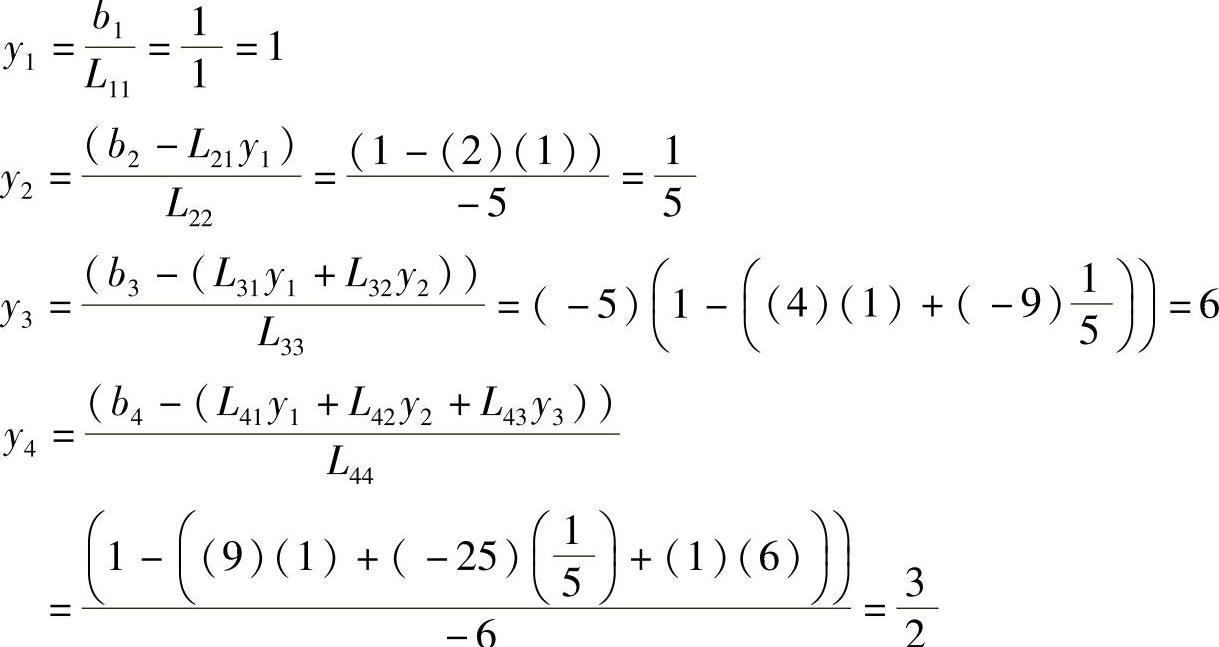
这样
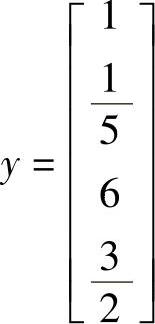
类似地,采用回代解方程Ux=y,可以得到解向量x为
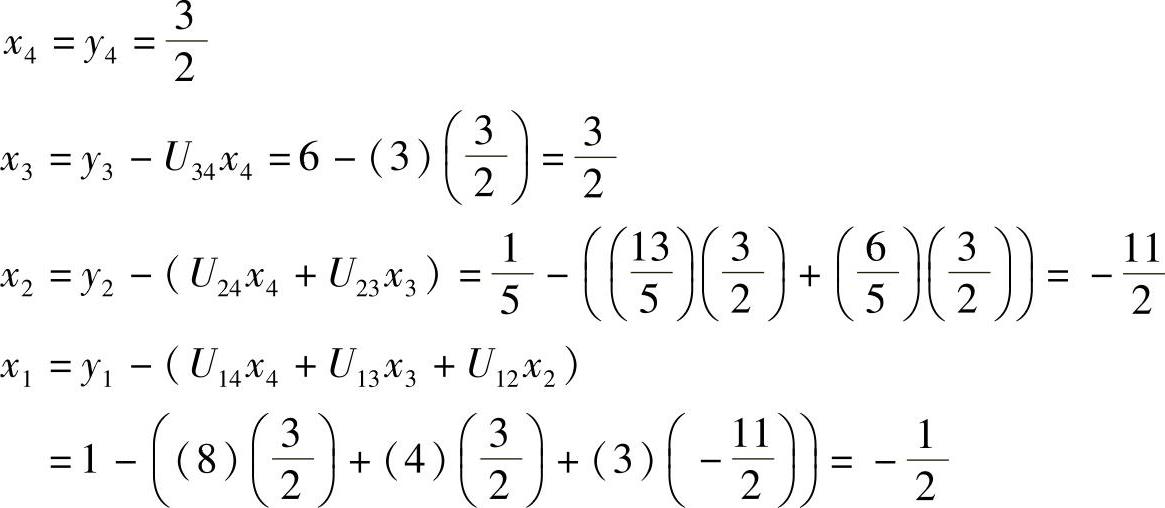
最终得到解向量
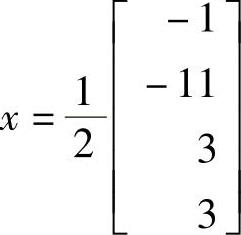
此解与例2.2中采用Gauss消去法和回代方法所得到的解是一样的。检查所得到的解是否正确的一种快速方法是将解向量x代回到线性方程组Ax=b中,看是否成立。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。