



1.电动单梁桥式起重机的基本形式
(1)按操纵形式分类
1)地面操纵:操作人员在地面控制按钮,操纵起升、下降、横向运行和纵向运行动作。起重机运行速度≤45m/min。运行电动机为笼型电动机。跟随式操纵也属于地面操纵。
2)司机室操纵:操作人员在司机室内控制按钮或控制器,操纵起升、下降、横向运行和纵向运行动作。起重机运行速度>45m/min为好。运行电动机为绕线转子电动机或双速笼型电动机。司机室有开式和闭式之分。
3)滑道式操纵:通过扁电缆可以在滑道中横向自由移动,操作人员在地面进行操纵,可以不随吊物横向移动,较为安全(也属于地面操纵)。
4)遥控操纵:操作者在一特定场所,一边监视起重机动作,一边操纵按钮或在操纵台上进行操纵控制。
(2)按起重机结构型式分类
1)按主梁结构型式分,有工字钢主梁、组合型主梁(圆管加工字钢、箱形加工字钢等)和箱形单主梁。
2)按端梁结构型式分,有型钢组合式端梁和箱形端梁。
3)按主、端梁连接结构分,有焊接连接和螺栓加减载凸缘,螺栓加减载轴和高强度螺栓连接之分。
4)按运行机构分,有集中驱动与分别驱动。分别驱动的典型形式是“三合一”运行机构。
5)按电源引入形式分,有软缆引入方式、滑接线引入方式和内藏安全保护滑触线方式。
2.电动单梁起重机的结构特征
电动单梁起重机由桥架、电动葫芦和电气系统构成。
桥架用来支承和移动载荷,由金属结构和运行机构组成。金属结构包括主梁、端梁及主端梁连接三部分。运行机构由驱动装置(电动机)、传动装置(减速器)、制动装置(制动器)和车轮装置四部分组成。电动葫芦负责升降和横向移动载荷。电气系统由主回路和控制回路组成。
国产电动单梁起重机有以下三代产品:第一代产品为20世纪50年代仿苏A571型电动单梁起重机,与TV型电动葫芦配套使用;第二代产品为20世纪70年代我国自行设计的LD型电动单梁起重机,它与CD、MD型电动葫芦配套使用;第三代产品为20世纪80年代为了与引进的AS型电动葫芦配套使用,而自行设计开发的LDT型电动单梁起重机。
1)第一代A571型电动单梁起重机。其桥架由桁架式金属结构和集中驱动的运行机构组成,主梁是由型钢组成的桁构梁,结构型式简单适用,建筑高度大。主桁架用来保证垂直刚度,水平桁架用来保证起重机的水平刚性,副桁架用来保证传动轴的刚性。端梁由型钢组焊而成。运行机构为集中驱动形式,传动效率低,当有歪斜跑偏时,易造成啃轨磨损,甚至会出现爬轨掉道故障。主梁与端梁之间的连接采用焊接连接形式。配套使用的电动葫芦只适宜选用TV型电动葫芦。当选用其他形式的电动葫芦时应注意电动葫芦的轮压大小,以防因轮压大造成工字钢主梁及工字钢轨道下翼缘的下塌事故。电气控制系统采用380V电压,很不安全(见图5⁃4)。
2)第二代LD型电动单梁起重机。其主梁由冷弯压制的∩型槽钢与工字钢组焊成实腹梁。当起重量为5t时,工字钢为特制加厚异型工字钢,这种形式的主梁结构简单,工艺性好。端梁为箱形结构,主端梁之间采用螺栓加减载凸缘连接结构,拆装方便,便于运输贮存,此种连接形式中螺栓只承受拉力,剪切力由减载凸缘承担。运行机构为分别驱动形式,尽管制动时难以保证绝对同步,但起重机两端车轮制动时有少量超前滞后现象是允许的。分别驱动的优点是能减轻因车轮歪斜跑偏造成的啃道磨损等故障,不易出现车轮爬轨掉道故障。运行机构的驱动装置,地面操纵的为0.8kW锥形笼型电动机,制动器为平面制动器;司机室时采用1.5kW锥形绕线转子电动机,制动器为锥形制动器。其结构如图5⁃5所示。(https://www.xing528.com)
3)第三代LDT型电动单梁起重机。其结构如图5⁃6所示,主梁采用H型工字钢或箱形组焊梁,结构简单,刚性好。端梁为“三合一”标准端梁,由组焊的箱形梁与“三合一”运行机构组成。主梁与端梁之间的连接为螺栓加减载凸缘连接形式。运行机构由“三合一”驱动装置与车轮装置构成(见图5⁃7)。
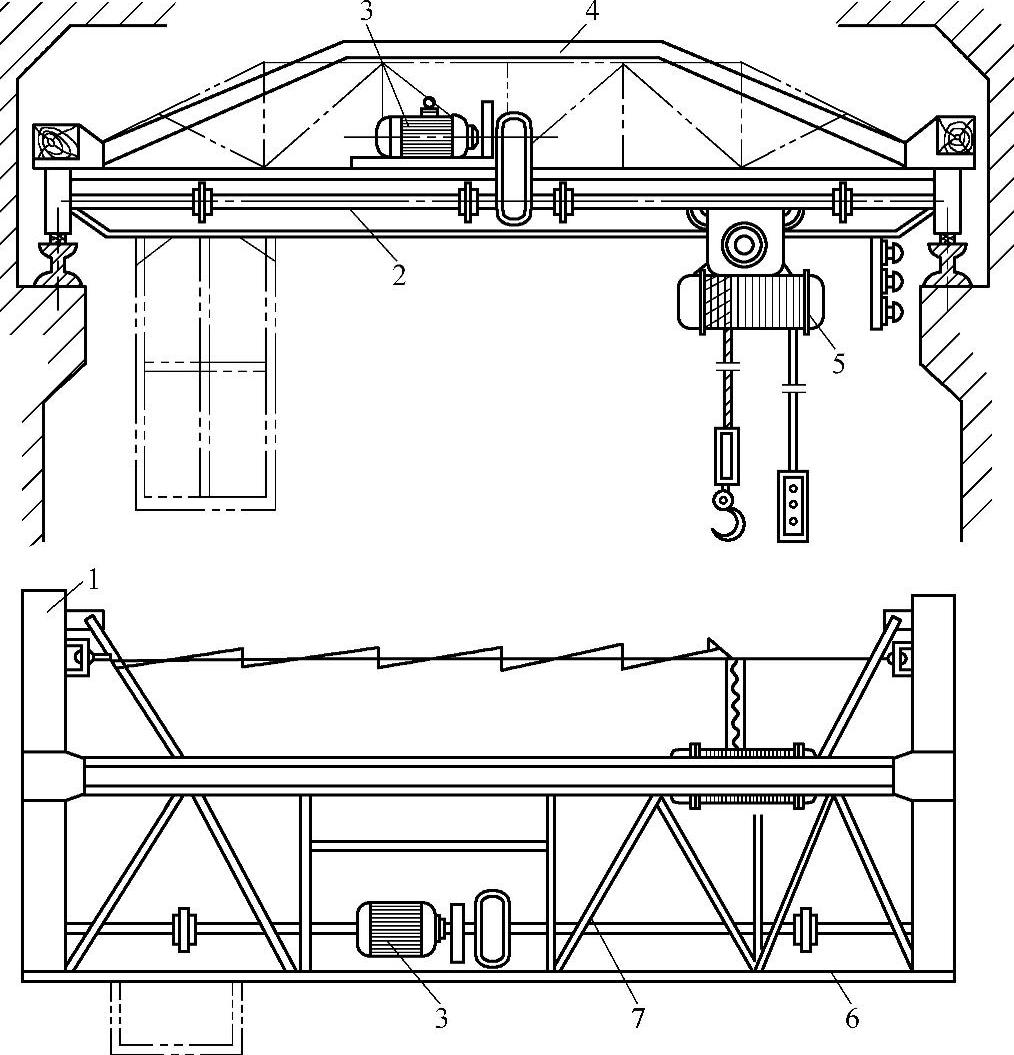
图5⁃4 A571型电动单梁起重机
1—端梁 2—工字形主梁 3—大车运行机构 4—垂直辅助桁架 5—电动葫芦 6—走台栏杆(主视图中用双点画线表示) 7—水平辅助桁架
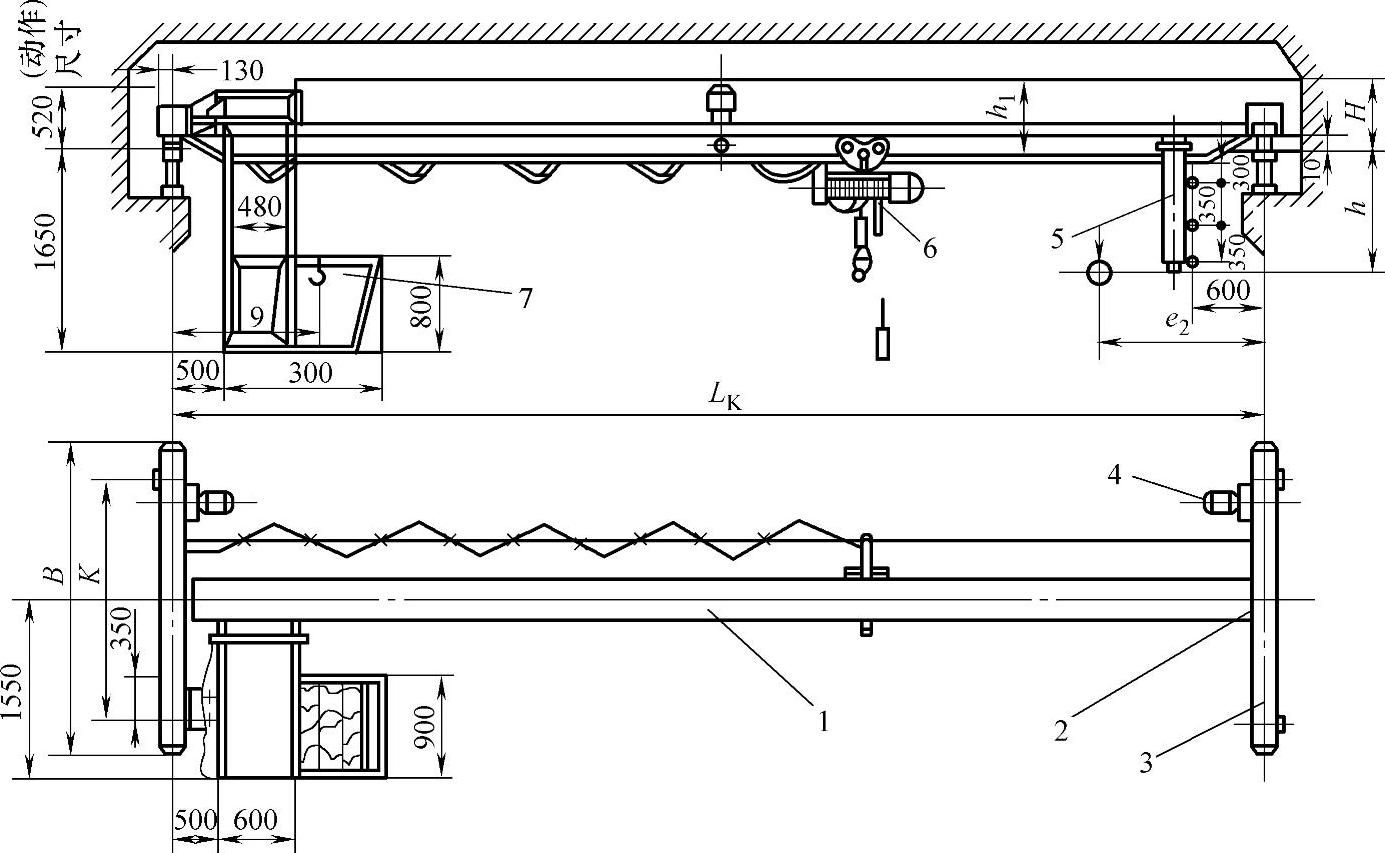
图5⁃5 LD型电动单梁起重机
1—主梁 2—主、端梁连接 3—端梁 4—运行机构 5—电气系统 6—CD型电动葫芦 7—司机室

图5⁃6 LDT型电动机单梁起重机
1—主梁 2—端梁 3—主端梁连接 4—“三合一”运行机构 5—扁电缆滑道操纵系统 6—AS型电动葫芦
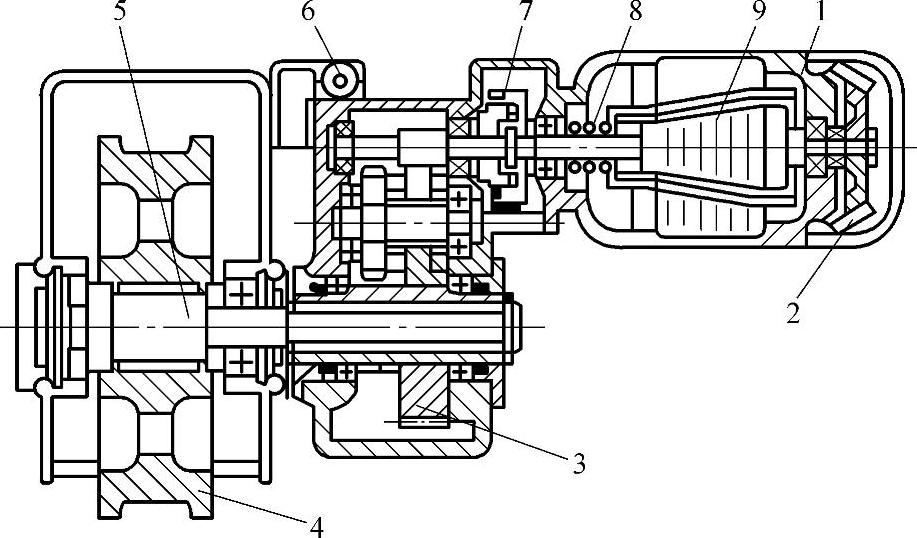
图5⁃7 DEMAG“三合一”运行机构
1—锥形电动机 2—锥形制动器 3—减速器 4—车轮 5—车轮轴 6—扭力矩支承 7—联轴器 8—压力弹簧 9—锥形转子
“三合一”驱动装置系由锥形电动机1、锥形制动器2和(QS型)减速器3构成。车轮轴通过花键与减速器QS型的输出齿轮连接,驱动起重机大车行走。
AS型电动葫芦为引进产品,具有下列安全装置:①电动机热保护装置;②上下双向断火保护装置;③起重量数字显示装置;④起重量限制报警装置;⑤错相保护功能,即使电动机错相接线,也不会造成事故。在上升极限位置限制器上增加一对开关触头。
操纵控制系统采用了低压操纵,安全可靠,同时又采用了扁电缆滑道式控制,操作人员可不随吊物横向移动,对操作人员的人身安全更有保障。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。