



1.轮系概念
轮系一般分为定轴轮系和周转轮系两种。在图3⁃31a所示的周转轮系中,内齿轮3以角速度ω3绕固定轴线O3转动;构件H带着齿轮2及轴线O2以角速度ωH绕固定轴线OH(即O1、O3)转动,因为齿轮2同时和齿轮1、3相啮合,所以轮1便在ω1及ωH这两种运动共同作用下以ω1的角速度绕固定轴线O1转动。在这种轮系中只要给定1、3和H中任意两个构件的运动规律,余下的一个构件的运动就完全确定了。这种轮系也称为行星轮系。如图3⁃31b所示,使内齿轮3固定不动(即ω3=0),只需知道构件H的运动规律,就能完全确定齿轮1的运动,反之亦然。这种轮系称为行星轮系。如果在如图3⁃31a所示的周转轮系中使臂架H固定不动,此时行星轮2只能绕其固定轴线O2转动,绕轴线OH的公转没有了,这样周转轮系就变成了定轴轮系(见图3⁃31c)。
周转轮系不仅可以由圆柱齿轮所组成,也可以由圆锥齿轮所组成,但必须保证两个太阳轮的轴线O1、O3重合。
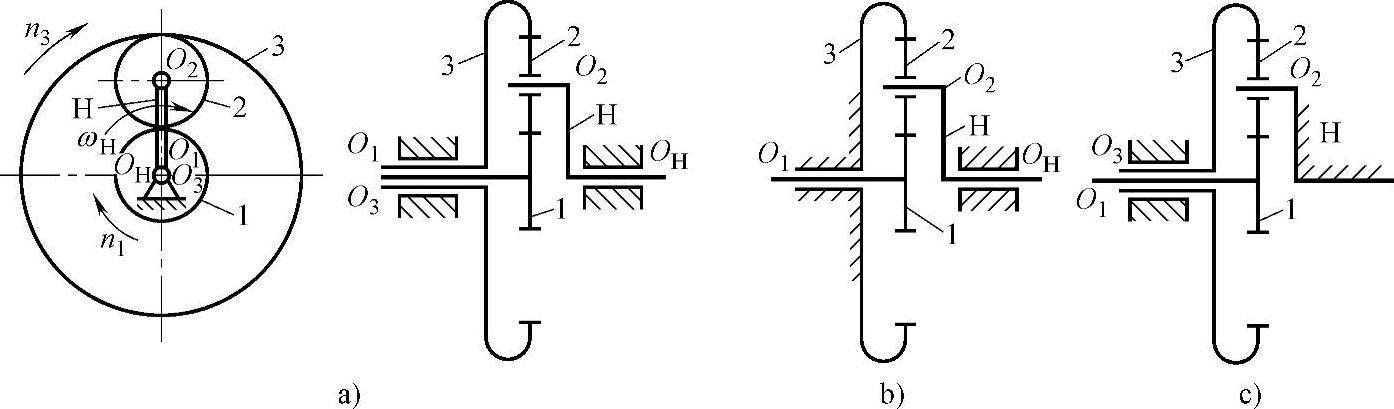
图3⁃31 轮系分类
a)周转轮系 b)行星轮系 c)定轴轮系 1、2、3—齿轮 H—构件
2.行星齿轮减速器分类
行星齿轮减速器可根据基本构件分类,也可按齿轮啮合方式分类。行星齿轮传动的基本构件包括太阳轮(中心轮),用K表示;行星轮用G表示;转臂用H表示;输出轴用V表示。行星齿轮传动装置有2K—H机构、3K机构、K—H—V机构等(见图3⁃34)。按齿轮啮合方式分为:内啮合用N表示;外啮合用W表示,G表示公用行星轮。
(1)2K—H类轮系 拥有两个太阳轮(2K),一个转臂(H)的周转轮系属于2K—H类轮系。常用的2K—H类轮系的几种形式如图3⁃32所示。
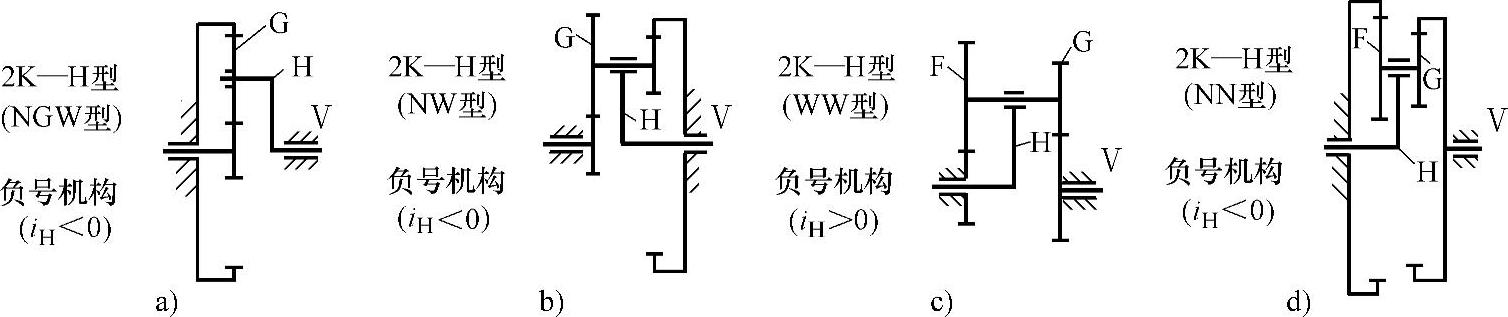
图3⁃32 2K—H类轮系机构简图
G—行星轮 H—转臂 V—输出轴 K—太阳轮
1)NGW型轮系如图3⁃34a所示,该型轮系是由内、外啮合和公用行星轮组成,结构简单、轴向尺寸小、工艺性好、效率高。NGW型轮系的传动比较小,但能多级串联成传动比大的轮系,这样就克服了单级传动比较小的缺点,所以NGW型成为动力传动中应用最多、传递功率最大的一种行星传动。
2)NW型轮系:如图3⁃32b所示,该型轮系由一对内啮合和一对外啮合齿轮组成,由于把行星轮做成双联齿轮,因此其为双排内外啮合,没有公用齿轮。与NGW型相比,NW型的传动比范围大、效率相仿、轴向尺寸大、结构较复杂、工艺性差一些。当传动比大于7时,径向尺寸显著减小。
3)WW型轮系:如图3⁃32c所示,该型轮系由双排两对外啮合齿轮组成。其特出的特点是能通过调整四个齿轮的齿数,轻易得到很大范围的传动比,但其效率低,并随传动比增加而急剧下降。
4)NN型轮系:如图3⁃32d所示,该型轮系由双排两对内啮合齿轮组成。通过调整行星轮与中心轮的齿数关系,可以得到传动比范围比NGW型的大;但效率低,传动比大到一定程度会出现自锁。与WW型相比,NN型轮系的尺寸紧凑、效率稍高,所以NN型轮系用于小功率、短时、间断工作制的传动装置中。
(2)3K类轮系 如图3⁃33a所示,该类轮系由a、b、c三个太阳轮、转臂K和双联行星轮组成。由于转臂K不承受外力矩,仅起支承行星轮的作用,故不是基本构件。三个太阳轮是基本构件,按拥有基本构件情况,将此类轮系称为3K类轮系。3K类轮系可用圆柱齿轮组成,也可以用圆锥齿轮组成,但由圆锥齿轮组成的3K类轮系,由于工艺上很困难,且无实际使用价值,故不应采用。(https://www.xing528.com)
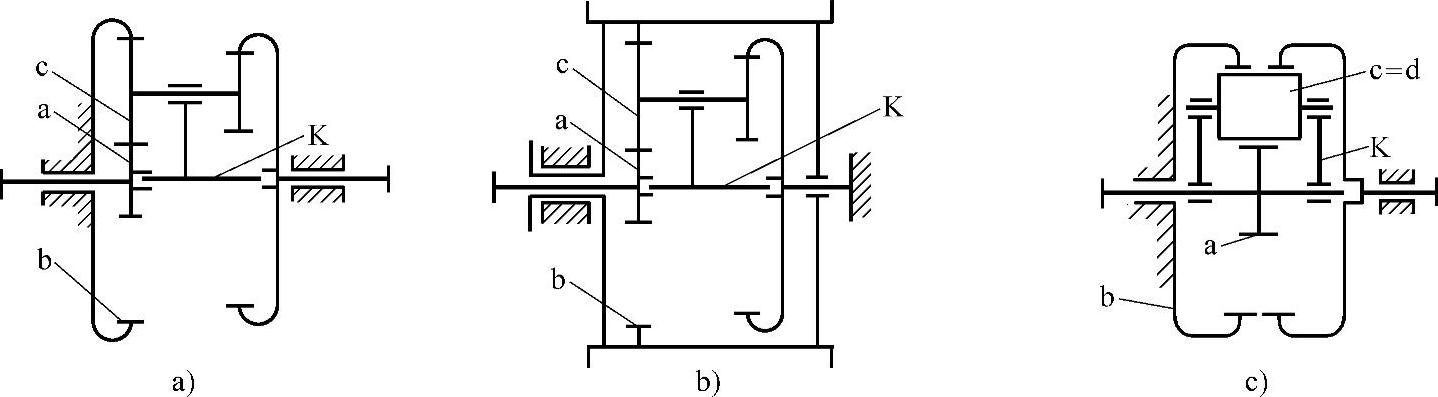
图3⁃33 3K类轮系机构简图(NGWN型)
a、b、c—太阳轮 K—转臂 d—行星轮
图3⁃33所示的3K轮系按啮合方式称为NGWN型。此型轮系可以以较小的尺寸实现小于500的传动比,且可以组成串联的多级NGWN型轮系。与NGW型轮系比较,NGWN型轮系效率低,且随传动比的增加而显著降低,工艺性也差。该轮系只适用于小功率的、短时间断性工作制的动力传动装置。图3⁃33a,是一个转动的太阳轮和一个固定的太阳轮共用一个行星轮;图3⁃33b为两个转动的太阳轮与同一个行星轮相啮合,且分别为输入、输出构件;图3⁃33c是c和d齿数相同的NGWN型轮系,工艺性比较好,但效率略有降低。
(3)K—H—V类轮系 在图3⁃34所示的K—H—V类轮系中,基本构件为内齿太阳轮b、转臂H和构件V,按啮合组成属于N型,称为N型轮系。K—H—V类轮系仅有N型一种形式。如图3⁃34a所示,太阳轮内齿b固定,当转臂H输入运动时,行星轮G除被迫绕自身轴心轴自转外,还跟随转臂H绕主轴线公转。因行星轮与构件V不同心,所以必须借助于一个输出机构,才能把转动传给构件V,这个输出机构称为W机构。常用的输出机构有销轴式、浮动盘式、滑块式等,应用得最多的是销轴式。如图3⁃34b所示,构件V固定,转臂H输入,太阳轮内齿圈b输出,如与卷筒连接,就成了行星卷扬了(汽车吊行星卷筒)。
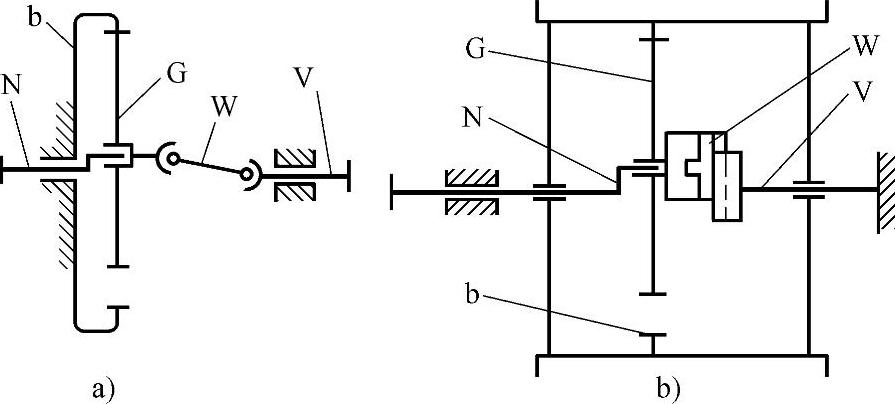
图3⁃34 K—H—V类轮系(N型)
b—太阳轮 H—转臂 V—构件 W—输出机构 G—行星轮
N型轮系的传动比是靠一对内啮合齿轮的齿数差实现的,当齿数差为1(还有2、3、4)时,即为一齿差行星传动,此时传动比最大,所以又称为少齿差行星齿轮传动。N型轮系中的齿轮用渐开线齿形时,称为渐开线少齿差行星齿轮传动,其结构如图3⁃35所示。它由偏心轴(即系杆H)1、行星齿轮2、内齿轮3、销套4、销轴5、转臂轴承6、输出轴7和壳体等零件组成。为了抵消轴上所受的轴向力和获得较好的平衡,该减速器采用了两个互成180°安装的行星齿轮2,转臂也相应地制成180°的双偏心轴。
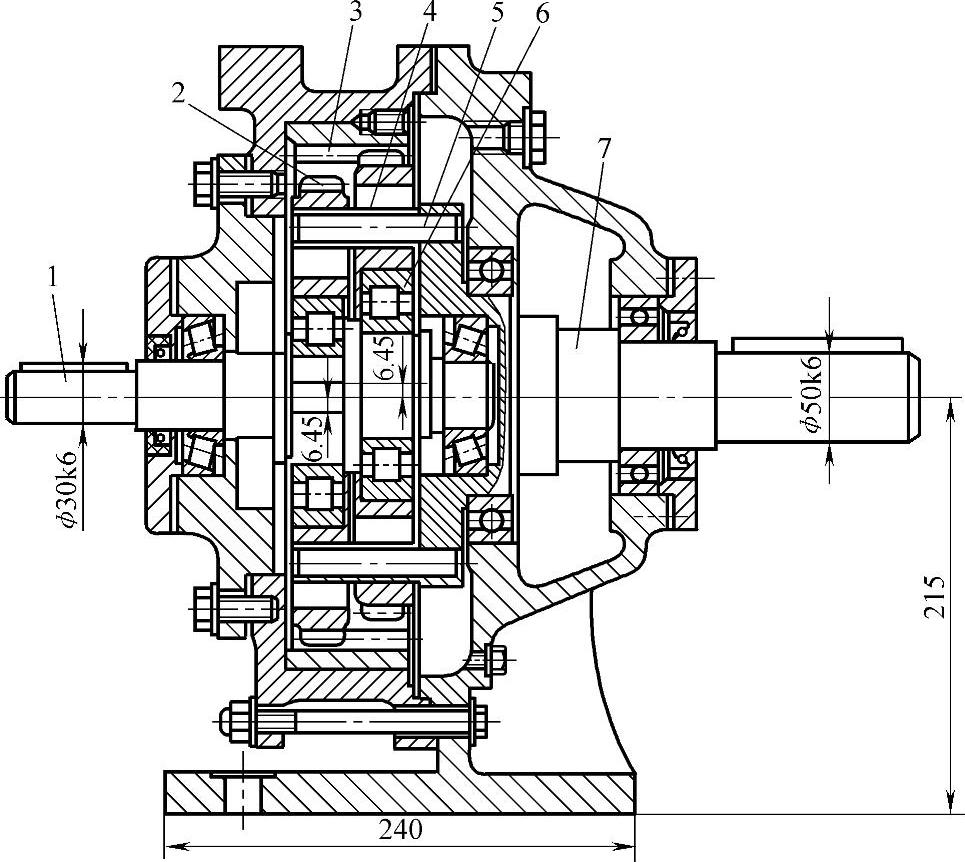
图3⁃35 销孔式少齿差行星齿轮减速器
1—偏心轴 2—行星齿轮 3—内齿轮 4—销套 5—销轴 6—转臂轴承 7—输出轴
渐开线少齿差行星传动的优点:①传动比大,单级传动的i可达135,两级传动可达10000以上;②结构简单,体积小,重量轻,与同功率传动比的普遍齿轮减速器相比,重量可减轻⅟以上;③加工方便,维修容易;④效率较高,单级减速器的效率可达0.8~0.94。
渐开线少齿差行星传动的缺点:①因齿数差很少,为了避免轮齿发生干涉现象,必须采用变位齿轮,其几何尺寸计算比较复杂;②在制造上,对输出机构精度要求较高;③由于采用正变位齿轮,啮合角增大,齿轮所受径向力增大,故轴和轴承受载也较大。
此类减速器应用在起重、运输、仪表、轻化、化工及食品等工业部门。
N型轮系中的齿轮除用渐开线齿形外,还有用针轮内齿、摆线外齿的,称为摆线针轮少齿差行星齿轮传动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。