



1.变气隙式电感传感器工作原理
图3-3所示为最简单的变气隙式电感传感器结构原理图。根据电磁学知识,得到变气隙式电感传感器的基本工作原理。
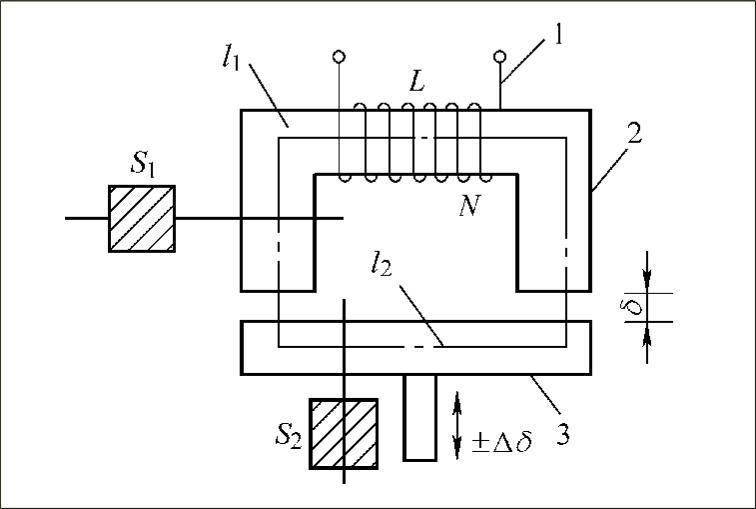
图3-3 变气隙式电感传感器
1—线圈 2—铁芯(定铁芯 3—衔铁(动铁芯)
衔铁和铁芯之间有空气隙,气隙厚度为δ。传感器的运动部分与衔铁相连,工作时衔铁与被测物体接触。当衔铁移动时,气隙厚度δ发生改变,引起磁路中气隙的磁阻变化,从而引起线圈电感变化,这种电感量的变化与衔铁位置(气隙大小)相对应。传感器线圈与测量电路连接后,将检测到的电感量的变化转化成电压、电流或频率的变化,完成从非电量到电量的转换,就能判断衔铁位移量的大小和方向。
根据对电感的定义,线圈中电感量可由下式确定:
式中 Ψ——线圈总磁链;
I——通过线圈的电流;
N——线圈的匝数;
Φ——穿过线圈的磁通。
由磁路欧姆定律,得
式中 Rm——磁路总磁阻。
根据电感的定义,线圈自感为
式中 Rm——磁路总磁阻;
N——电感传感器线圈的匝数。
由于变气隙式电感传感器的气隙通常较小,可以认为气隙间磁场是均匀的,磁路是封闭的,因此可忽略磁路损失。总磁阻为
Rm=Rm0+Rm1+Rm2
对于变气隙式传感器,若忽略磁路磁损,则磁路总磁阻为
式中 μ1——铁芯材料的磁导率;
μ2——衔铁材料的磁导率;
l1——磁通通过铁芯的长度;
l2——磁通通过衔铁的长度;
S1——铁芯的截面积;
S2——衔铁的截面积;
μ0——空气的磁导率;
S0——气隙的截面积;
δ——气隙的厚度。
由于导磁体的磁导率远远大于空气的磁导率,即μ1>>μ0和μ2>>μ0,所以通常气隙磁阻远大于铁芯和衔铁的磁阻,即

则磁路总磁阻可写为
 (https://www.xing528.com)
(https://www.xing528.com)
通过各公式转换可得自感量为
上式表明,当线圈匝数为常数时,电感L仅仅是磁路中磁阻Rm的函数,改变δ或S0均可导致电感变化,因此变磁阻式传感器又可分为变气隙厚度δ的传感器和变气隙面积S0的传感器。目前使用最广泛的是变气隙厚度式电感传感器。
电感线圈结构确定后,电感与面积成正比,与气隙长度成反比。这样,只要被测量能引起面积和气隙的变化,都可用电感传感器进行测量。其灵敏度为
为提高灵敏度并保证一定的线性度,变气隙式电感传感器只能工作在很小的区域,因而只能用于微小位移的测量。
2.输出特性
在线圈匝数N确定后,如保持气隙有效截面积为常数,则由电感量L公式可知L与δ之间是非线性关系。特性曲线如图3-4所示。设电感传感器初始气隙为δ0,初始电感量为L0,衔铁位移引起的气隙变化量为Δδ,当衔铁处于初始位置时,初始电感量为
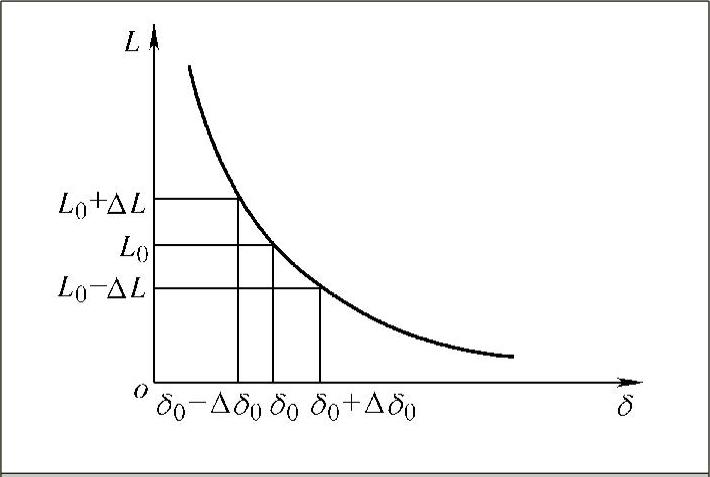
图3-4 变气隙式电感传感器的L-δ特性
当衔铁上移Δδ时,传感器气隙减少Δδ,即δ=δ0-Δδ,则此时输出电感为L=L0+ΔL,代入公式并整理,得
当Δδ/δ0<<1时,可将上式用泰勒级数展开成如下的级数形式:

由上式可求得电感增量ΔL和相对增量ΔL/L0的表达式,即
同理,当衔铁随被测体的初始位置向下移动Δδ时,有
对公式做线性处理,即忽略高次项后,可得
当衔铁受到外力的作用,使气隙变大时,电感的相对变化量为
灵敏度为
为了保证一定的线性度,变气隙式电感传感器仅能工作在很小一段区域内,因而能用于
微小位移的测量,一般取δ0=0.1~0.5mm,Δδ=0.1~0.2δ0。
由此可见,变气隙式电感传感器的测量范围与灵敏度及线性度相矛盾,因此变气隙式电感传感器适用于测量微小位移的场合。为了减少非线性误差,实际测量中广泛采用差动变气隙式电感传感器,如图3-5所示。
差动变气隙式电感传感器由两个相同的电感线圈的磁路组成。测量时,衔铁与被测物体相连,当被测物体上下移动时,带动衔铁以相同的位移上下移动,两个磁回路的磁阻发生大小相等、方向相反的变化,一个线圈的电感量增加,另一个线圈的电感量减少,形成差动形式。
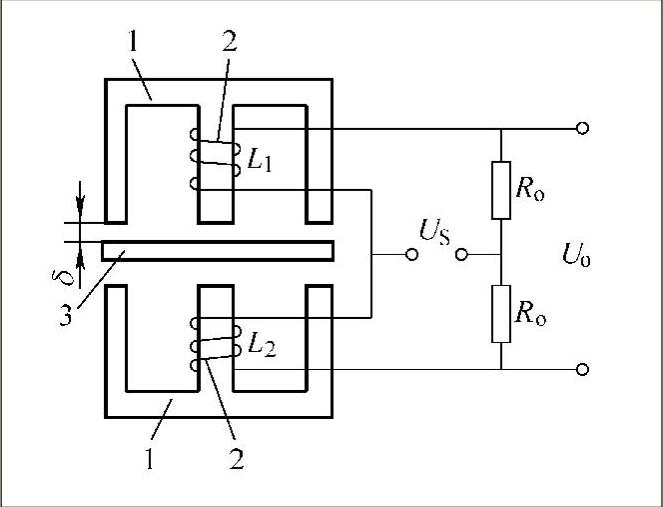
图3-5 差动变气隙式电感传感器
1—铁芯 2—线圈 3—衔铁
将两个电感线圈接入交流电桥的相邻桥臂,另两个桥臂由电阻组成,电桥的输出电压与电感变化量ΔL有关,可得灵敏度为
差动变气隙式电感传感器灵敏度较高,线性度好,差动式的两个电感结构可抵消温度、噪声干扰的影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。