



【摘要】:图11.13 拖动点在“选取”对话框中,单击按钮,移动鼠标,模型运动如图11.14所示。图11.14 运动图注意如果拖动过程中,模型的运动与设计意图相同,就可以继续进行模型的运动分析,否则,对模型重新连接。图11.15 “伺服电动机定义”对话框图11.16 运动轴在“伺服电动机定义”对话框中,单击按钮,选择下拉列表框中的“速度”选项,选择下拉列表框中的“常数”选项,在文本框中键入360,单击按钮,完成伺服电动机的创建。
在对机构进行设置之前,需要对机构进行检测,如果机构是符合设计意图,那么就可以对机构设置动力源和运动环境等模型元素。
1.检测机构
(1)选择菜单栏中的【应用程序(P)】→【机构(E)】命令,系统自动进行机构平台。(2)单击“视图”工具栏上的【拖动元件】工具按钮 ,或选择菜单栏中的【视图(V)】→【方向(Q)】→【拖动元件(D)】命令,系统弹出“拖动”对话框和“选取”对话框。
,或选择菜单栏中的【视图(V)】→【方向(Q)】→【拖动元件(D)】命令,系统弹出“拖动”对话框和“选取”对话框。
(3)在3D模型中,选择拖动点,如图11.13所示。
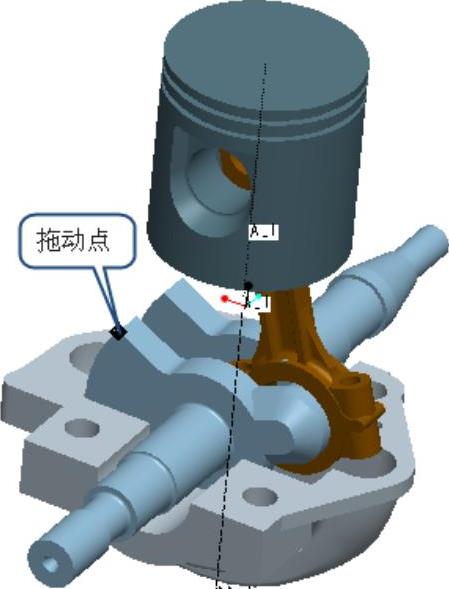
图11.13 拖动点
(4)在“选取”对话框中,单击【确定】按钮,移动鼠标,模型运动如图11.14所示。
(5)单击“拖动”对话框中的【关闭】按钮,完成模型的拖动。
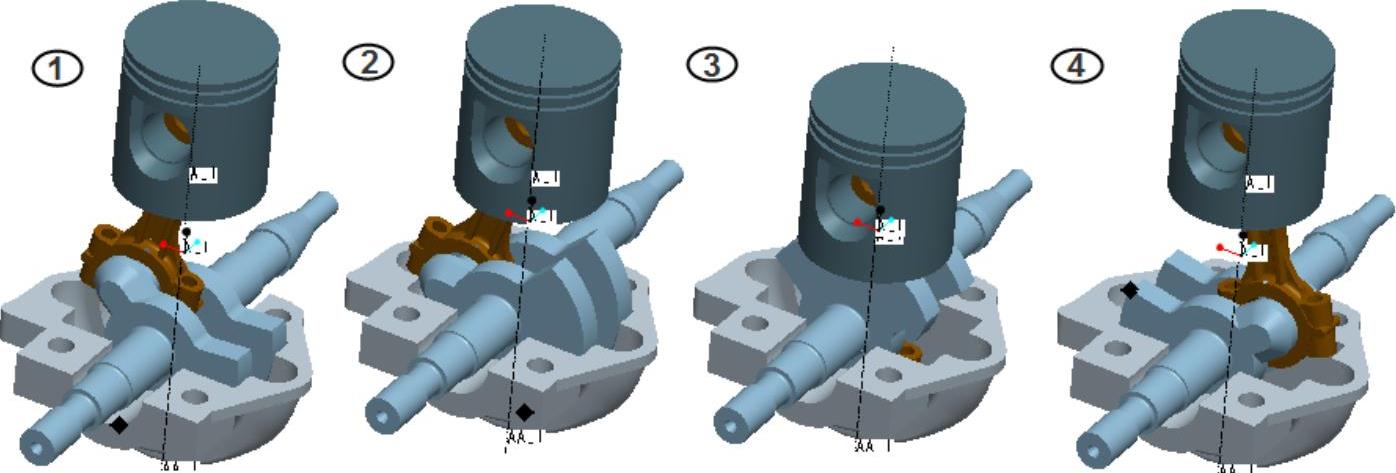
图11.14 运动图(https://www.xing528.com)
注意
如果拖动过程中,模型的运动与设计意图相同,就可以继续进行模型的运动分析,否则,对模型重新连接。
2.添加伺服电动机
(1)单击“模型”工具栏上的【伺服电动机】工具按钮 ,系统弹出“伺服电动机定义”对话框,如图11.15所示,点选【从动图元】选项组中【运动轴】单选按钮,单击【选取】按钮
,系统弹出“伺服电动机定义”对话框,如图11.15所示,点选【从动图元】选项组中【运动轴】单选按钮,单击【选取】按钮 ,在3D模型中选择伺服电动机旋转轴,如图11.16所示。
,在3D模型中选择伺服电动机旋转轴,如图11.16所示。

图11.15 “伺服电动机定义”对话框
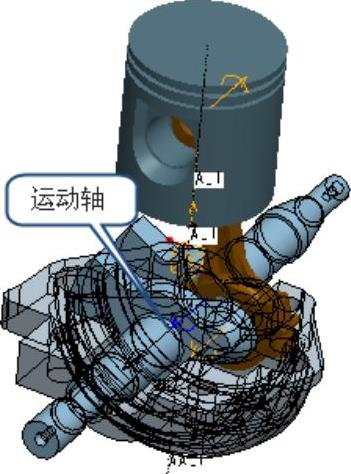
图11.16 运动轴
(2)在“伺服电动机定义”对话框中,单击【轮廓】按钮,选择【规范】下拉列表框中的“速度”选项,选择【模】下拉列表框中的“常数”选项,在【A】文本框中键入360,单击【确定】按钮,完成伺服电动机的创建。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。