



凸轮是一种相当重要的连杆件。因为其应用简单,又容易达到所需的运动目的,所以在诸多机械加工、印刷机、内燃机等自动化机械或玩具设计中,凸轮机构被广泛应用。
下面以如图4.68所示凸轮机构为了,讲解凸轮机构仿真的步骤。
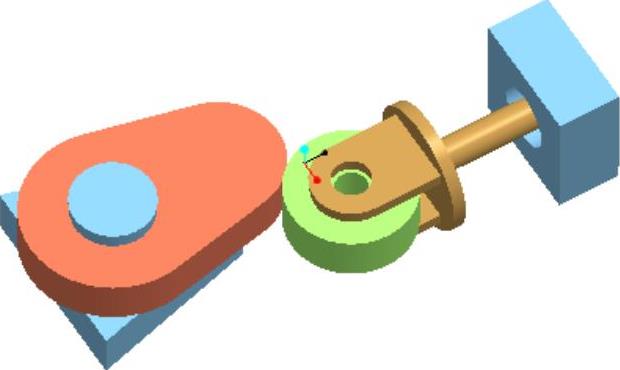
图4.68 凸轮机构
1.组装活塞
(1)选择菜单栏中的【文件(F)】→【设置工作目录(W)】命令,系统弹出“选取工作目录”对话框,选择活塞所在的文件夹,单击【确定】按钮,完成工作目录的设置。(2)选择菜单栏中的【文件(F)】→【新建(N)】命令,系统弹出“新建”对话框,勾选【组件】复选框,在【名称】文本框中键入000,取消【使用缺省模板】复选框,单击【确定】按钮,系统弹出“新文件选项”对话框。
(3)在“文件选项”对话框中,选中【模板】列表框中的“mmns_asm_design”选项,单击【确定】按钮,进入装配设计模块。
(4)单击“工程特征”工具栏上的【装配】工具按钮 ,或选择菜单栏中的【插入(I)】→【元件(C)】→【装配(A)】命令,系统弹出“打开”对话框,选择元件2.prt,单击【打开】按钮,支架就添加到当前模型中,同时在信息提示栏中显示元件装配控制面板。
,或选择菜单栏中的【插入(I)】→【元件(C)】→【装配(A)】命令,系统弹出“打开”对话框,选择元件2.prt,单击【打开】按钮,支架就添加到当前模型中,同时在信息提示栏中显示元件装配控制面板。
(5)选择【用户定义】右侧下拉列表框中的“固定”选项,在控制面板中【状态】文本框中显示“完成连接定义”选项,单击控制面板中的【完成】按钮 ,完成支架的装配约束。
,完成支架的装配约束。
(6)单击“工程特征”工具栏上的【装配】工具按钮 ,或选择菜单栏中的【插入(I)】→【元件(C)】→【装配(A)】命令,系统弹出“打开”对话框,选择元件1.prt,单击【打开】按钮,支架就添加到当前模型中,同时在信息提示栏中显示元件装配控制面板。
,或选择菜单栏中的【插入(I)】→【元件(C)】→【装配(A)】命令,系统弹出“打开”对话框,选择元件1.prt,单击【打开】按钮,支架就添加到当前模型中,同时在信息提示栏中显示元件装配控制面板。
(7)选中【将约束转化为机构连接】右侧下拉列表框中的“销钉”选项,单击【放置】选项卡,单击【轴对齐】按钮,在3D模型中选择支架销轴轴线和凸轮安装孔的轴线,单击【平移】按钮,在3D模型中选择支架安装面和凸轮的侧面,如图4.69所示。
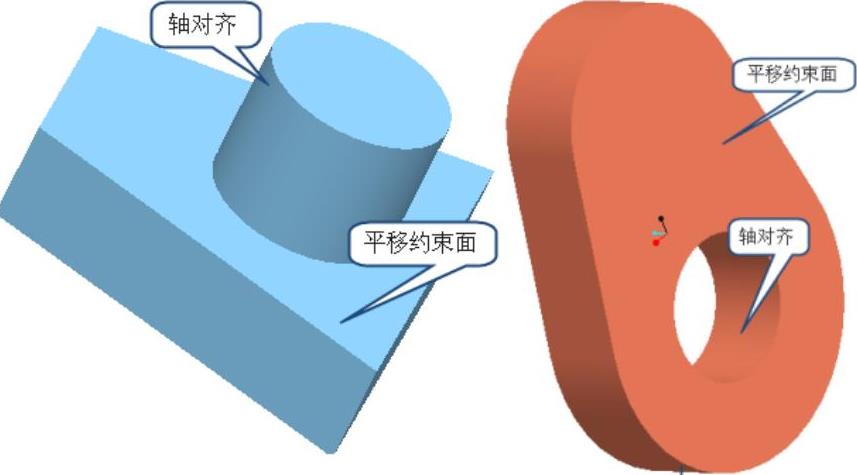
图4.69 销钉约束元素
(8)在控制面板中【状态】文本框中显示“完成连接定义”选项,单击控制面板中的【完成】按钮 ,完成基座的装配约束。
,完成基座的装配约束。
(9)单击“工程特征”工具栏上的【装配】工具按钮 ,或选择菜单栏中的【插入(I)】→【元件(C)】→【装配(A)】命令,系统弹出“打开”对话框,选择元件3.asm,单击【打开】按钮,滑杆就添加到当前模型中,同时在信息提示栏中显示元件装配控制面板。
,或选择菜单栏中的【插入(I)】→【元件(C)】→【装配(A)】命令,系统弹出“打开”对话框,选择元件3.asm,单击【打开】按钮,滑杆就添加到当前模型中,同时在信息提示栏中显示元件装配控制面板。
(10)选中【将约束转化为机构连接】右侧下拉列表框中的“滑动杆”选项,单击【放置】选项卡,单击【轴对齐】按钮,在3D模型中选择支架安装孔的轴线和滑杆轴线,单击【旋转】按钮,在3D模型中选择支架的FRONT基准面和滑杆的FRONT基准面,如图4.70所示。
(11)在控制面板中【状态】文本框中显示“完成连接定义”选项,单击控制面板中的【完成】按钮 ,完成滑杆的装配约束。
,完成滑杆的装配约束。
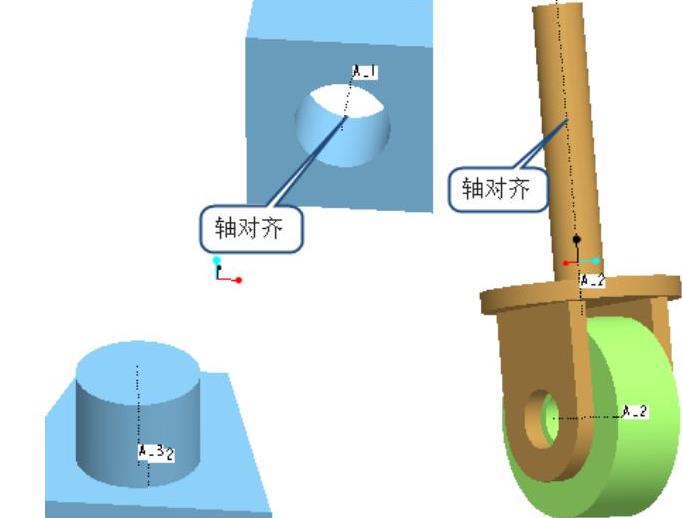
图4.70 滑动杆约束元素
2.机构设置
(1)选择菜单栏中的【应用程序(P)】→【机构(E)】命令,系统自动进行机构平台。
(2)单击【模型】工具栏上的【凸轮】工具按钮 ,或选择菜单栏中的【插入(I)】→【凸轮(C)】命令,系统弹出“凸轮从动机构连接定义”对话框。
,或选择菜单栏中的【插入(I)】→【凸轮(C)】命令,系统弹出“凸轮从动机构连接定义”对话框。
(3)单击【凸轮1】选项卡中【曲面/曲线】选项组中【选取】按钮 ,在3D模型中选择凸轮的工作面,如图4.71所示。
,在3D模型中选择凸轮的工作面,如图4.71所示。
(4)单击【凸轮2】选项卡中【曲面/曲线】选项组中【选取】按钮 ,在3D模型中选择凸轮的工作面,如图4.72所示。
,在3D模型中选择凸轮的工作面,如图4.72所示。
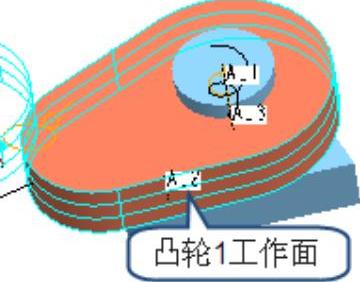
图4.71 凸轮1工作面
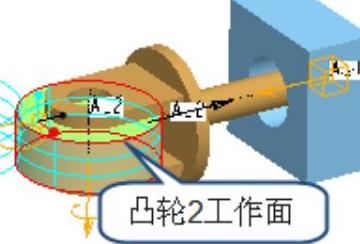
图4.72 凸轮2工作面
(5)其他选项为系统默认值,单击【确定】按钮,完成凸轮的定义。
(6)单击“视图”工具栏上的【拖动元件】工具按钮 ,或选择菜单栏中的【视图(V)】→【方向(Q)】→【拖动元件(D)】命令,系统弹出“拖动”对话框和“选取”对话框。
,或选择菜单栏中的【视图(V)】→【方向(Q)】→【拖动元件(D)】命令,系统弹出“拖动”对话框和“选取”对话框。
(7)在3D模型中,选择拖动点,如图4.73所示。
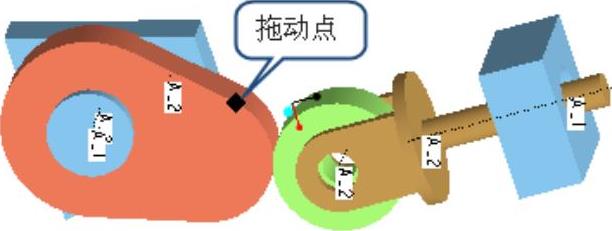
图4.73 拖动点(https://www.xing528.com)
(8)在“选取”对话框中,单击【确定】按钮,移动鼠标,模型运动如图4.74所示。
(9)单击“拖动”对话框中的【关闭】按钮,完成模型的拖动。
(10)单击【模型】工具栏上的【伺服电动机】工具按钮 ,系统弹出“伺服电动机定义”对话框,点选【从动图元】选项组中【运动轴】单选按钮,单击【选取】按钮
,系统弹出“伺服电动机定义”对话框,点选【从动图元】选项组中【运动轴】单选按钮,单击【选取】按钮 ,在3D模型中选择伺服电动机旋转轴,如图4.75所示。
,在3D模型中选择伺服电动机旋转轴,如图4.75所示。
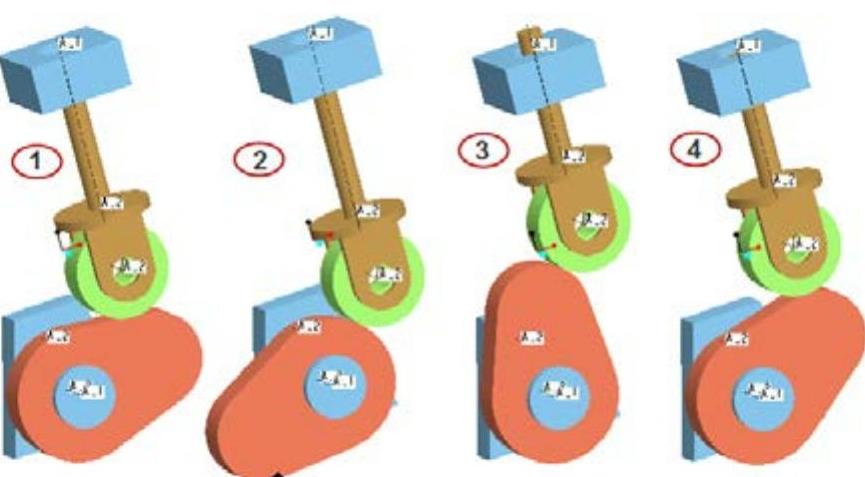
图4.74 运动图
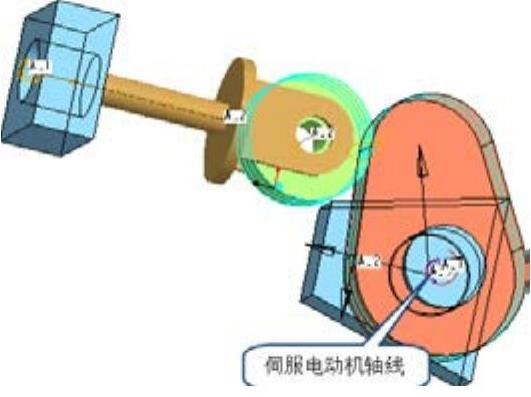
图4.75 伺服电动机轴线
(11)在“伺服电动机定义”对话框中,单击【轮廓】按钮,选择【规范】下拉列表框中的“速度”选项,选择【模】下拉列表框中的“常数”选项,在【A】文本框中键入36,单击【确定】按钮,完成伺服电动机的创建。
3.运动分析
(1)自由度分析。单击“运动”工具栏上的【机构分析】工具按钮 ,系统弹出“分析定义”对话框,如图4.76所示,选择【类型】下拉列表框中的“力平衡”选项,单击【自由度】选项组中【DOF】右侧的【评估】按钮
,系统弹出“分析定义”对话框,如图4.76所示,选择【类型】下拉列表框中的“力平衡”选项,单击【自由度】选项组中【DOF】右侧的【评估】按钮 ,在【DOF】文本框中显示为1,表示模型系统的自由度为1。
,在【DOF】文本框中显示为1,表示模型系统的自由度为1。
(2)运动仿真
 单击“运动”工具栏上的【机构分析】工具按钮
单击“运动”工具栏上的【机构分析】工具按钮 ,系统弹出“分析定义”对话框,选择【类型】下来列表框中的“运动学”选项,在【终止时间】文本框中键入10;
,系统弹出“分析定义”对话框,选择【类型】下来列表框中的“运动学”选项,在【终止时间】文本框中键入10;
 其他选项为系统默认值,单击【运行】按钮,模型就开始运动,效果参见目录下的000.avi。
其他选项为系统默认值,单击【运行】按钮,模型就开始运动,效果参见目录下的000.avi。
(3)包络分析
 单击“运动”工具栏上的【回放】工具按钮
单击“运动”工具栏上的【回放】工具按钮 ,系统弹出“回放”对话框;
,系统弹出“回放”对话框;
 单击【创建运动包络】工具按钮
单击【创建运动包络】工具按钮 ,系统弹出“创建运动包络”对话框,单击【选取元件】选项组中【选取】按钮
,系统弹出“创建运动包络”对话框,单击【选取元件】选项组中【选取】按钮 ,在3D模型中选择凸轮,选中对话框中的【颠倒三角形】按钮,然后单击【预览】按钮,效果如图4.77所示;
,在3D模型中选择凸轮,选中对话框中的【颠倒三角形】按钮,然后单击【预览】按钮,效果如图4.77所示;
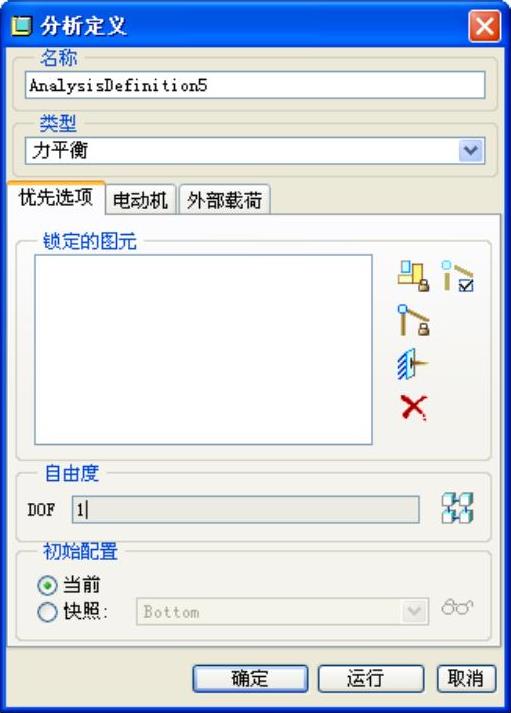
图4.76 “分析定义”对话框
图4.77 窗口的凸轮包络
 单击【关闭】按钮,返回“回放”对话框,单击【关闭】按钮,完成包络分析。
单击【关闭】按钮,返回“回放”对话框,单击【关闭】按钮,完成包络分析。
(4)分析测量结果
 单击“运动”工具栏上的【测量】工具按钮
单击“运动”工具栏上的【测量】工具按钮 ,系统弹出“测量结果”对话框,单击【创建新测量】工具按钮
,系统弹出“测量结果”对话框,单击【创建新测量】工具按钮 ,系统弹出“测量定义”对话框,如图4.78所示。
,系统弹出“测量定义”对话框,如图4.78所示。
 在“测量定义”对话框中,选择【类型】下来列表框中的“速度”选项,单击【点或运动轴】选项组中的【选取】按钮
在“测量定义”对话框中,选择【类型】下来列表框中的“速度”选项,单击【点或运动轴】选项组中的【选取】按钮 ,在3D模型中选择滑杆滚轮一点,如图4.79所示。
,在3D模型中选择滑杆滚轮一点,如图4.79所示。
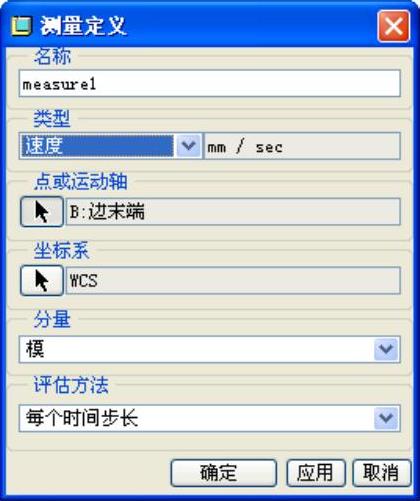
图4.78 “测量定义”对话框
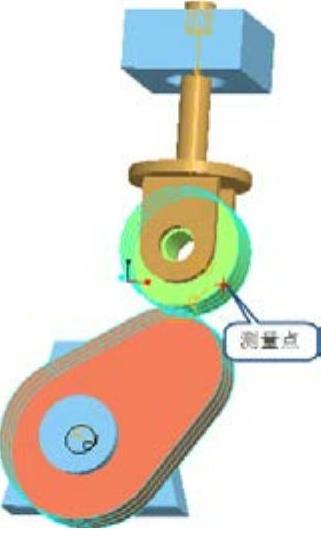
图4.79 测量点
 在“测量定义”对话框中,单击【确定】按钮,返回“测量结果”对话框,选中【测量】列表框中的“measure1”选项,选中【结果集】列表框中的“AnalysisDefinition1”选项,单击工具栏中的【绘制选定结果集所选测量的图形】按钮
在“测量定义”对话框中,单击【确定】按钮,返回“测量结果”对话框,选中【测量】列表框中的“measure1”选项,选中【结果集】列表框中的“AnalysisDefinition1”选项,单击工具栏中的【绘制选定结果集所选测量的图形】按钮 ,系统弹出“图形工具”对话框,对话框中显示结果,如图4.80所示。
,系统弹出“图形工具”对话框,对话框中显示结果,如图4.80所示。
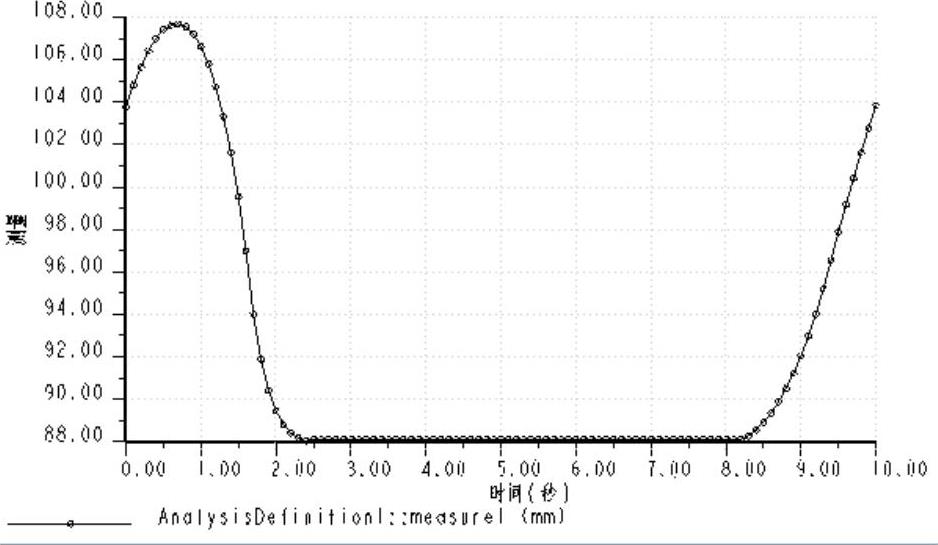
图4.80 滑杆滚轮一点速度曲线
 退出图形工具窗口,保存分析结果,完成模型的分析。
退出图形工具窗口,保存分析结果,完成模型的分析。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。