



连杆机构是利用一个转动的曲柄带动其他的连杆旋转、摆动或往复运动。即连杆机构具有以下功能:
 由连续运动转变成另一种连续运动,其转速可能为定值,或是随时间变化的速度。
由连续运动转变成另一种连续运动,其转速可能为定值,或是随时间变化的速度。
 由连续运动转变为摆动或往复运动(或相反方向),其速度可能为定值或可变值。
由连续运动转变为摆动或往复运动(或相反方向),其速度可能为定值或可变值。
 由一种摆动方式转为另一种摆动方式,由一种往复运动转变成另一种往复运动,其速度可为定值或可变值。
由一种摆动方式转为另一种摆动方式,由一种往复运动转变成另一种往复运动,其速度可为定值或可变值。
连杆机构中最常见的就是四连杆机构,也是最简单的连杆结构。许多有用的机构均由四连杆机构改变而成,其中包括运动副的特征、连杆长度的比例等。较复杂的连杆机构则由两个或两个以上的这种机构组合而成。大部分的四连杆机构可以分为曲柄滑块机构和平行四边形机构两大类。
下面以如图4.52所示的四连杆机构为例,讲解连杆机构运动分析过程。
1.组装四连杆机构
(1)选择菜单栏中的【文件(F)】→【设置工作目录(W)】命令,系统弹出“选取工作目录”对话框,选择四连杆零部件所在的文件夹,单击【确定】按钮。
(2)选择菜单栏中的【文件(F)】→【新建(N)】命令,系统弹出“新建”对话框,在对话框中点选【组件】单选按钮,在【名称】文本框中键入0000,取消【使用缺省模板】复选框,单击【确定】按钮,系统弹出“新文件选项”对话框,选中“mmns_asm_design”模板选项,单击【确定】按钮装配工作平台。
(3)单击“工程特征”工具栏上的【装配】工具按钮 ,在系统弹出的“打开”对话框中,选择a.PRT将其加载到当前工作台中。
,在系统弹出的“打开”对话框中,选择a.PRT将其加载到当前工作台中。
(4)在连接下拉列表框中选择“用户自定义”选项,在其后的约束下拉列表框中选择“固定”选项,或者单击【放置】工具按钮,在弹出的“放置”对话框中【约束类型】下拉列表框中选择“固定”选项。
(5)单击【完成】按钮 ,完成主体的固定。
,完成主体的固定。
(6)单击“工程特征”工具栏上的【装配】工具按钮 ,在系统弹出的“打开”对话框中,选择b.PRT将其加载到当前工作台中。
,在系统弹出的“打开”对话框中,选择b.PRT将其加载到当前工作台中。
(7)选中【将约束转换为机构连接】按钮 ,在其后的下拉列表框中选择“销钉”选项,或单击【放置】工具按钮,系统弹出的“放置”对话框,在【集类型】下拉列表框中选择“销钉”选项,在销钉连接下自动添加“轴对齐”、“平移”、“旋转轴”选项。
,在其后的下拉列表框中选择“销钉”选项,或单击【放置】工具按钮,系统弹出的“放置”对话框,在【集类型】下拉列表框中选择“销钉”选项,在销钉连接下自动添加“轴对齐”、“平移”、“旋转轴”选项。
(8)选中“轴对齐”约束选项,在3D模型中选择元件a.prt的孔轴线和元件b.prt的孔轴线,如图4.53所示。
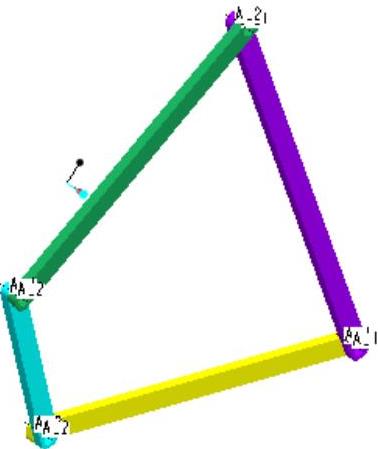
图4.52 四连杆机构
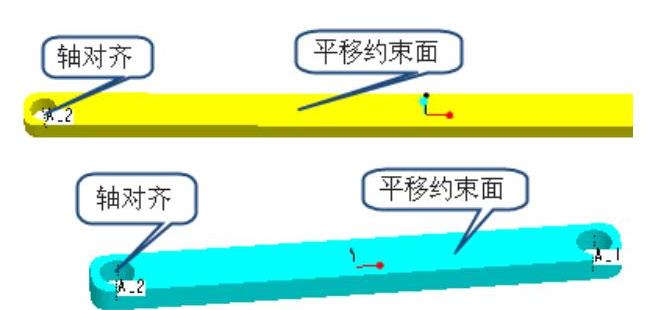
图4.53 销钉约束元素
(9)选中“平移”选项,在3D模型中选择元件a.prt和元件b.prt的结合面。
(10)使用同样的方法,将元件c.prt与元件b.prt之间建立“销钉”连接,元件d.prt与元件c.prt之间建立“销钉”连接,元件d.prt与元件a.prt之间建立“圆柱”连接。
2.机构设置
(1)选择菜单栏中的【应用程序(P)】→【机构(E)】命令,系统自动进入机构设计平台。
(2)选择菜单栏中的【编辑(E)】→【质量属性(A)】命令,或单击“动态”工具栏上的【质量属性】工具按钮,系统弹出“质量属性”对话框,在【参照类型】下拉列表框中选择“组件”选项,如图4.54所示。
(3)单击【组件】选项组中【选取】箭头按钮 ,系统弹出“选取”对话框,在3D模型中选择组件0000.asm,单击【确定】按钮。
,系统弹出“选取”对话框,在3D模型中选择组件0000.asm,单击【确定】按钮。
(4)在“质量属性”对话框中【定义属性】下拉列表框中选择“密度”选项,在【零件密度】文本框中键入7.85,单击【确定】按钮,完成质量属性的设置。
(5)选择菜单栏中的【编辑(E)】→【重力(R)】命令,或单击“动态”工具栏上的【重力】工具按钮 ,系统弹出“重力”对话框,在【方向】选项组中【X】文本框中键入1,【Z】文本框中键入-1,单击【确定】按钮,完成机构重力方向的设置。
,系统弹出“重力”对话框,在【方向】选项组中【X】文本框中键入1,【Z】文本框中键入-1,单击【确定】按钮,完成机构重力方向的设置。
(6)单击【模型】工具栏上的【伺服电动机】工具按钮 ,或选择菜单栏中的【插入(I)】→【伺服电动机(V)】命令,系统弹出“伺服电动机定义”对话框,如图4.55所示。
,或选择菜单栏中的【插入(I)】→【伺服电动机(V)】命令,系统弹出“伺服电动机定义”对话框,如图4.55所示。
(7)单击【类型】选项卡中【从动元件】选项组中的【选取】按钮 ,在3D模型中选择运动轴,如图4.56所示。
,在3D模型中选择运动轴,如图4.56所示。

图4.54 “质量属性”对话框
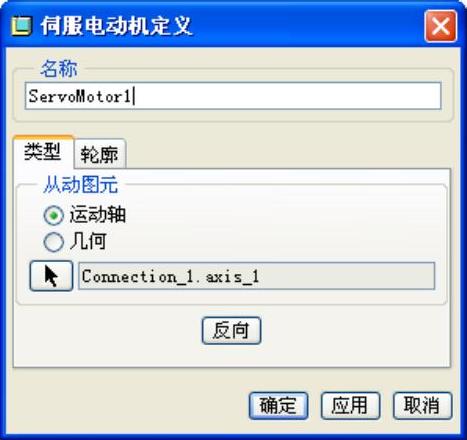
图4.55 “伺服电动机定义”对话框
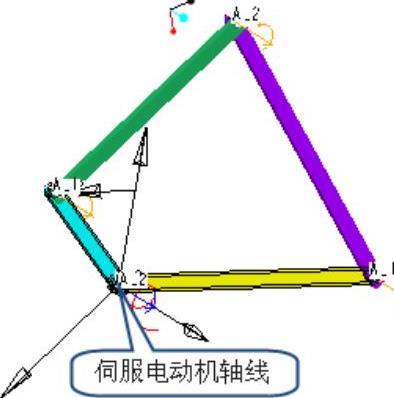
图4.56 伺服电动机轴线
(8)在“伺服电动机定义”对话框中,单击【轮廓】按钮,选择【规范】下拉列表框中的“速度”选项,选择【模】下拉列表框中的“常数”选项,在【A】文本框中键入360,单击【确定】按钮,完成伺服电动机的创建。
3.运动分析
(1)自由度分析
 选择菜单栏中的【分析(A)】→【机构分析(Y)】命令,或单击“运动”工具栏上的【机构分析】工具按钮,系统弹出“分析定义”对话框,如图4.57所示。
选择菜单栏中的【分析(A)】→【机构分析(Y)】命令,或单击“运动”工具栏上的【机构分析】工具按钮,系统弹出“分析定义”对话框,如图4.57所示。
 在“分析定义”对话框中,选择【类型】下来列表框中的“力平衡”选项,单击【自由度】选项组中【DOF】右侧的【评估】按钮
在“分析定义”对话框中,选择【类型】下来列表框中的“力平衡”选项,单击【自由度】选项组中【DOF】右侧的【评估】按钮 ,在【DOF】文本框中显示为0,表示模型系统的自由度为0。
,在【DOF】文本框中显示为0,表示模型系统的自由度为0。
注意
从理论上,一个自由度代表只要确定机构中任意一个活动机构的位置,就可以确定机构中所有其他机构的位置。从数学意义来讲,整个机构只需要一个变量就可以确定下来。从实际应用的观点来看,可以认为一个有一个自由度的机构,只需一个伺服电动机就能驱动它。
(2)静态分析
 选择菜单栏中的【分析(A)】→【机构分析(Y)】命令,或单击“运动”工具栏上的【机构分析】工具按钮,系统弹出“分析定义”对话框。(https://www.xing528.com)
选择菜单栏中的【分析(A)】→【机构分析(Y)】命令,或单击“运动”工具栏上的【机构分析】工具按钮,系统弹出“分析定义”对话框。(https://www.xing528.com)
 在“分析定义”对话框中,【类型】下拉列表框中选择“静态”选项。
在“分析定义”对话框中,【类型】下拉列表框中选择“静态”选项。
 单击【外部载荷】选项卡,勾选【启动重力】复选框,单击【运行】按钮,四连杆机构从初始状态运行到平衡状态停止运行,效果如图4.58所示。
单击【外部载荷】选项卡,勾选【启动重力】复选框,单击【运行】按钮,四连杆机构从初始状态运行到平衡状态停止运行,效果如图4.58所示。
 同时,系统弹出四连杆加速度曲线图,效果如图4.59所示。
同时,系统弹出四连杆加速度曲线图,效果如图4.59所示。
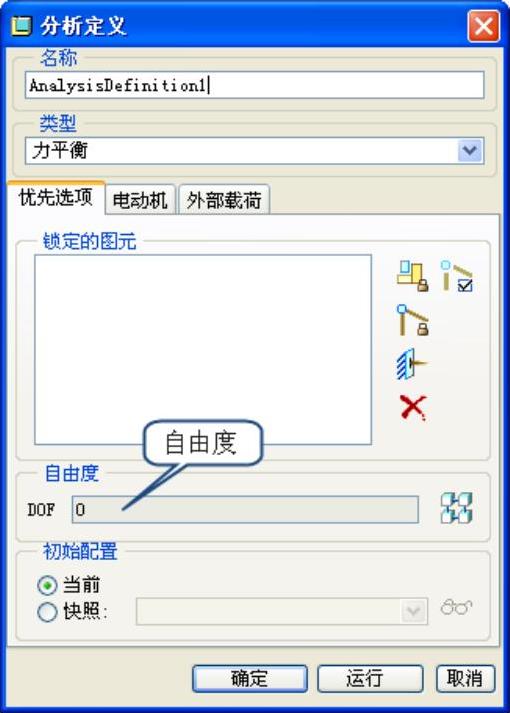
图4.57 “分析定义”对话框
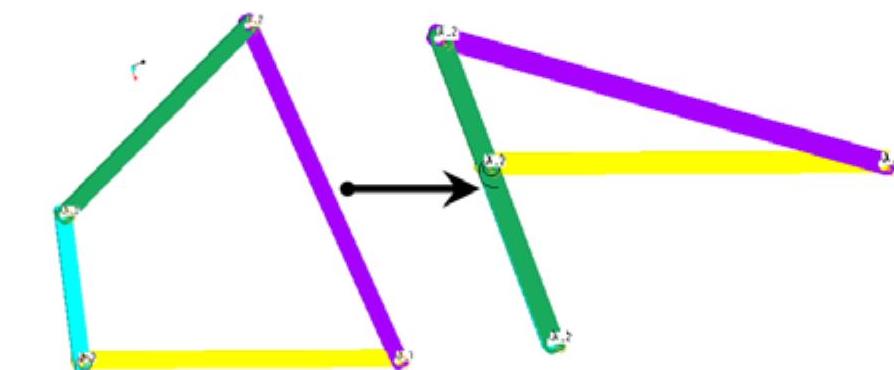
图4.58 分析前后
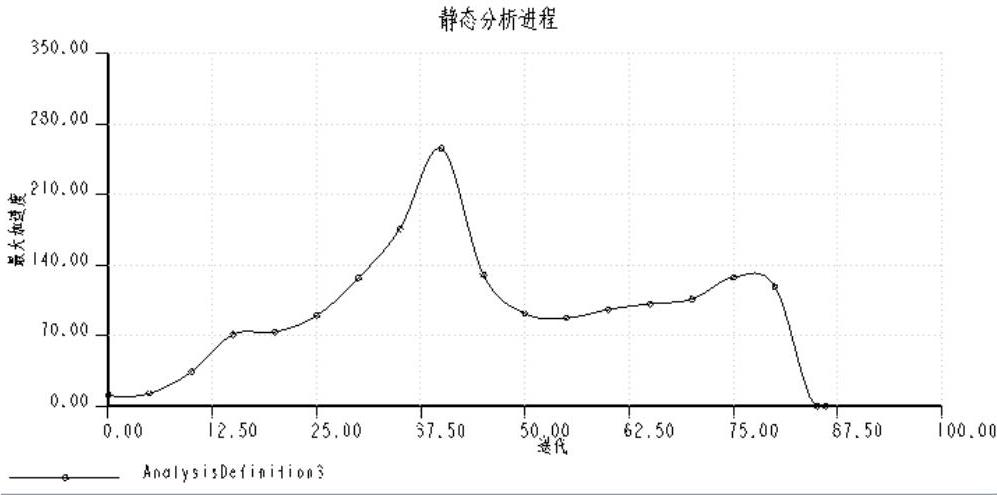
图4.59 最大加速度曲线
 关闭“图形工具”对话框,返回“分析定义”对话框,单击【确定】按钮,完成四连杆机构的静态分析。
关闭“图形工具”对话框,返回“分析定义”对话框,单击【确定】按钮,完成四连杆机构的静态分析。
(3)动态分析(运动仿真)
 选择菜单栏中的【分析(A)】→【机构分析(Y)】命令,或单击“运动”工具栏上的【机构分析】工具按钮,系统弹出“分析定义”对话框。
选择菜单栏中的【分析(A)】→【机构分析(Y)】命令,或单击“运动”工具栏上的【机构分析】工具按钮,系统弹出“分析定义”对话框。
 在“分析定义”对话框中,【类型】下拉列表框中选择“动态”选项,在【终止时间】文本框中键入10。
在“分析定义”对话框中,【类型】下拉列表框中选择“动态”选项,在【终止时间】文本框中键入10。
 单击【外部载荷】选项卡,勾选【启动重力】复选框,单击【运行】按钮,模型就开始运动,效果参见目录下的0000.avi。
单击【外部载荷】选项卡,勾选【启动重力】复选框,单击【运行】按钮,模型就开始运动,效果参见目录下的0000.avi。
(4)包络分析
 单击“运动”工具栏上的【回放】工具按钮
单击“运动”工具栏上的【回放】工具按钮 ,系统弹出“回放”对话框。
,系统弹出“回放”对话框。
 单击【创建运动包络】工具按钮
单击【创建运动包络】工具按钮 ,系统弹出“创建运动包络”对话框,单击【选取元件】选项组中【选取】按钮
,系统弹出“创建运动包络”对话框,单击【选取元件】选项组中【选取】按钮 ,在3D模型中选择连杆C.prt,如图4.60所示,选中对话框中的【颠倒三角形】按钮,单击【预览】按钮,效果如图4.61所示。
,在3D模型中选择连杆C.prt,如图4.60所示,选中对话框中的【颠倒三角形】按钮,单击【预览】按钮,效果如图4.61所示。
 单击【关闭】按钮,返回“回放”对话框,单击【关闭】按钮,完成包络分析。
单击【关闭】按钮,返回“回放”对话框,单击【关闭】按钮,完成包络分析。
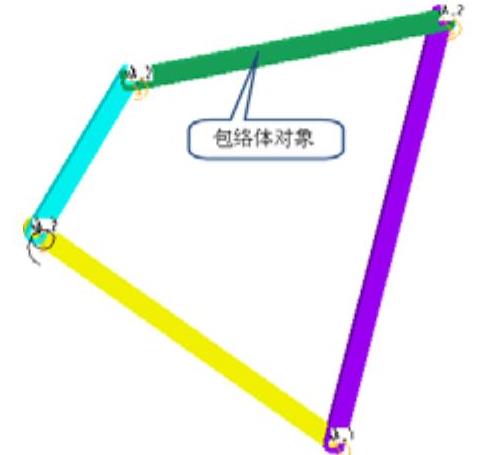
图4.60 选择的包络体对象
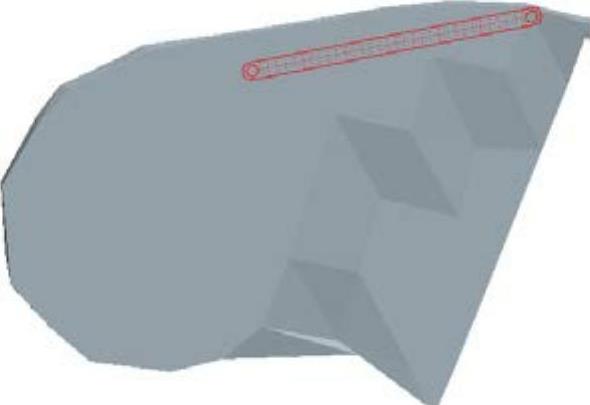
图4.61 窗口的包络体
(5)分析测量结果
 单击“运动”工具栏上的【测量】工具按钮
单击“运动”工具栏上的【测量】工具按钮 ,系统弹出“测量结果”对话框,单击【创建新测量】工具按钮
,系统弹出“测量结果”对话框,单击【创建新测量】工具按钮 ,系统弹出“测量定义”对话框,如图4.62所示。
,系统弹出“测量定义”对话框,如图4.62所示。
 在“测量定义”对话框中,选择【类型】下来列表框中的“位置”选项,单击【点或运动轴】选项组中的【选取】按钮
在“测量定义”对话框中,选择【类型】下来列表框中的“位置”选项,单击【点或运动轴】选项组中的【选取】按钮 ,在3D模型中选择旋转轴,如图4.63所示。
,在3D模型中选择旋转轴,如图4.63所示。
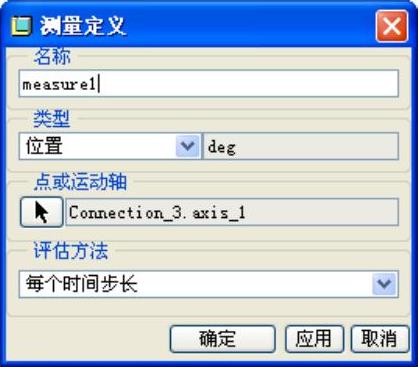
图4.62 “测量定义”对话框
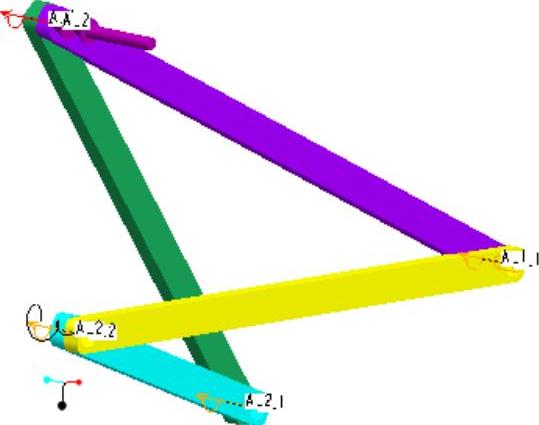
图4.63 选择的测量轴
 在“测量定义”对话框中,单击【确定】按钮,返回“测量结果”对话框,选中【测量】列表框中的“measure1”选项,选中【结果集】列表框中的“AnalysisDefinition1”选项,单击工具栏中的【绘制选定结果集所选测量的图形】按钮
在“测量定义”对话框中,单击【确定】按钮,返回“测量结果”对话框,选中【测量】列表框中的“measure1”选项,选中【结果集】列表框中的“AnalysisDefinition1”选项,单击工具栏中的【绘制选定结果集所选测量的图形】按钮 ,系统弹出“图形工具”对话框,对话框中显示结果,如图4.64所示。
,系统弹出“图形工具”对话框,对话框中显示结果,如图4.64所示。
 退出图形工具窗口,保存分析结果,完成模型的分析。
退出图形工具窗口,保存分析结果,完成模型的分析。
 使用同样方法创建该旋转轴的速度曲线,如图4.65所示。
使用同样方法创建该旋转轴的速度曲线,如图4.65所示。
 使用同样方法创建该旋转轴的加速度曲线,如图4.66所示。
使用同样方法创建该旋转轴的加速度曲线,如图4.66所示。
 使用同样方法创建该旋转轴的连接轴反作用力曲线,如图4.67所示。
使用同样方法创建该旋转轴的连接轴反作用力曲线,如图4.67所示。
 关闭图形工具窗口,返回测量结果窗口,单击【关闭】按钮,完成四连杆机构的运动分析。
关闭图形工具窗口,返回测量结果窗口,单击【关闭】按钮,完成四连杆机构的运动分析。
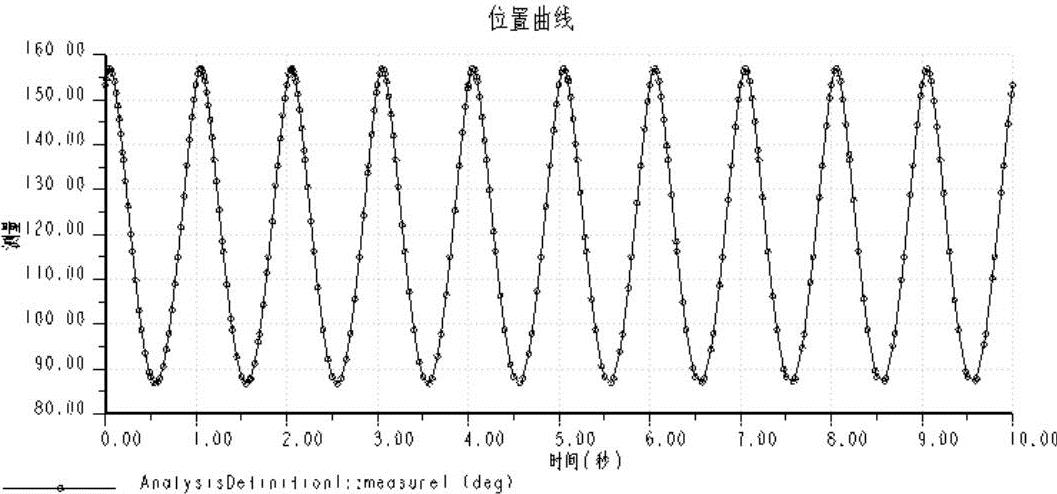
图4.64 旋转轴位置曲线

图4.65 旋转轴的速度曲线
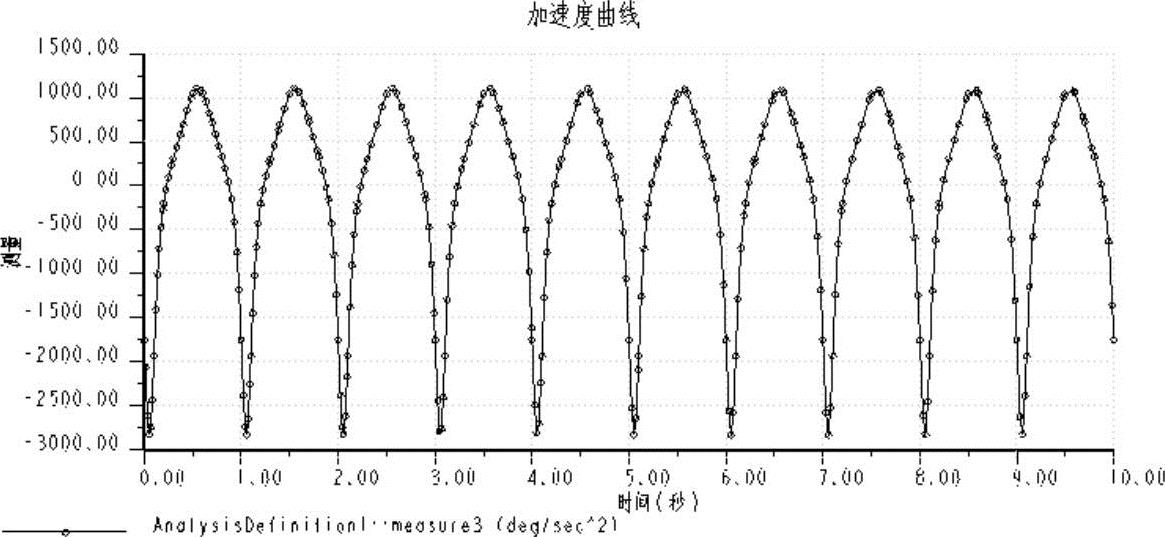
图4.66 旋转轴加速度曲线
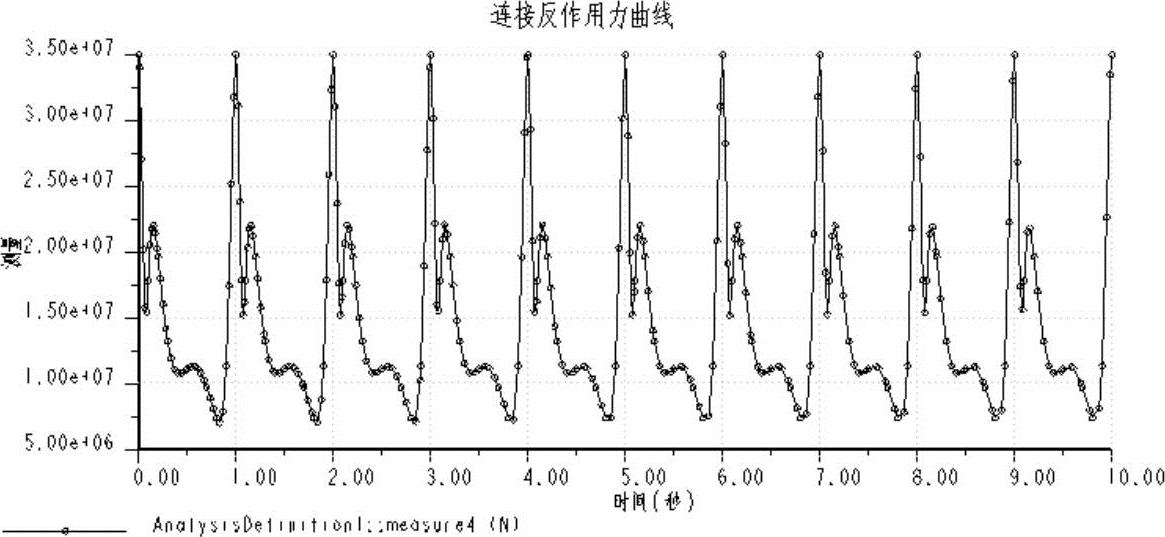
图4.67 旋转轴连接反作用力曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。