



定义完连接后就需要给机构添加饲服电动机才能驱使机构运动。选择【插入(I)】→【伺服电动机(V)】命令,或直接单击“模型”工具栏上的【伺服电动机】工具按钮 ,系统弹出“伺服电动机定义”对话框,如图3.83所示。
,系统弹出“伺服电动机定义”对话框,如图3.83所示。
1.【名称】选项组
【名称】选项组用于定义机构伺服电动机名称,系统默认为ServoMotor1,也可以更改为其他。
2.【类型】选项卡
【类型】选项卡用于定义伺服电动机的类型和方向等参数。【从动图元】选项组用于定义伺服电动机要驱动图元类型:连接轴、点和面等几何参数。
 点选【运动轴】单选按钮,系统弹出“选取”对话框,在3D模型中选取在“机械设计”模块中添加的连接轴,文本框中显示选取的连接轴,如图3.83所示。
点选【运动轴】单选按钮,系统弹出“选取”对话框,在3D模型中选取在“机械设计”模块中添加的连接轴,文本框中显示选取的连接轴,如图3.83所示。
 点选【几何】单选按钮,伺服电动机定义对话框更新为如图3.84所示,同时系统弹出“选取”对话框,在3D模型中选取运动的几何元素,可以是点或面。
点选【几何】单选按钮,伺服电动机定义对话框更新为如图3.84所示,同时系统弹出“选取”对话框,在3D模型中选取运动的几何元素,可以是点或面。
 【参照图元】选项组用于定义几何元素运动图元的参照,可以是任意的点或面。
【参照图元】选项组用于定义几何元素运动图元的参照,可以是任意的点或面。
 【运动方向】选项组用于定义运动图元的运动方向,只能选取直线或曲线。
【运动方向】选项组用于定义运动图元的运动方向,只能选取直线或曲线。
 【运动类型】选项组用于指定伺服电动机的运动方式:平移、旋转。
【运动类型】选项组用于指定伺服电动机的运动方式:平移、旋转。
 【反向】工具按钮用于改变伺服电动机的运动方向,单击该按钮则机构中伺服电动机黄色箭头指向相反的方向。
【反向】工具按钮用于改变伺服电动机的运动方向,单击该按钮则机构中伺服电动机黄色箭头指向相反的方向。
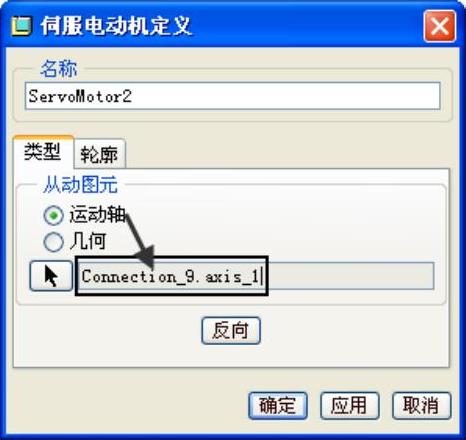
图3.83 “伺服电动机定义”对话框
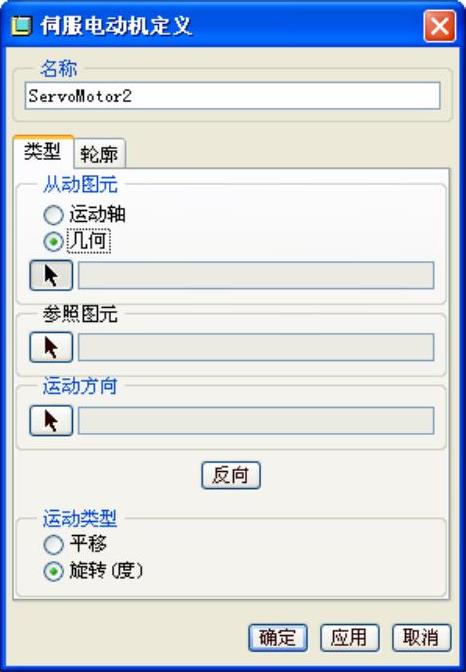
图3.84 “伺服电动机定义”对话框
3.【轮廓】选项卡
【轮廓】选项卡,如图3.85所示,用于定义伺服电动机的位置、转速、加转速等参数。
(1)【规范】选项组:单击【定义运动轴设置】按钮 ,可以调出“连接轴设置”对话框,可以在其后的下拉列表框中选择转速、加转速、位置3种类型。对于不同的选项,相应会有不同的对话框出现。
,可以调出“连接轴设置”对话框,可以在其后的下拉列表框中选择转速、加转速、位置3种类型。对于不同的选项,相应会有不同的对话框出现。
 在下拉列表框中选择“位置”选项,单击【定义运动轴设置】按钮
在下拉列表框中选择“位置”选项,单击【定义运动轴设置】按钮 直接调用“连接轴设置”对话框设置连接轴。选定的连接轴将以洋红色箭头标示,同时高亮显示绿色和橙色主体,如图3.86所示。
直接调用“连接轴设置”对话框设置连接轴。选定的连接轴将以洋红色箭头标示,同时高亮显示绿色和橙色主体,如图3.86所示。

图3.85 “位置”选项
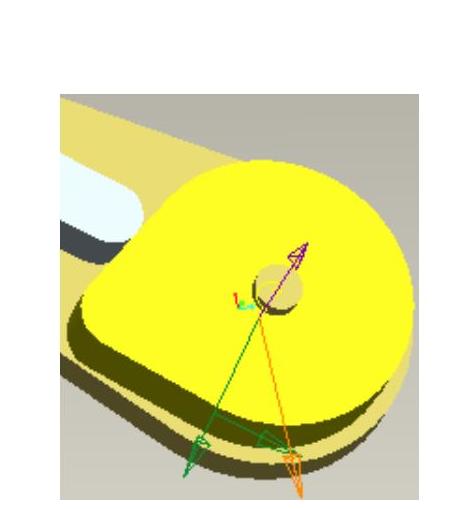
图3.86 连接轴位置
 在下拉列表框选择“转速”选项,如图3.87所示,“伺服电动机定义”对话框出现【始初始角】选项组。勾选【当前】复选框,则机构以当前位置为准;也可以输入一个角度后按【预览位置】工具按钮
在下拉列表框选择“转速”选项,如图3.87所示,“伺服电动机定义”对话框出现【始初始角】选项组。勾选【当前】复选框,则机构以当前位置为准;也可以输入一个角度后按【预览位置】工具按钮 使机构的零位置变为数字所指示的位置。如图3.88所示为初始位置和旋转60°位置。
使机构的零位置变为数字所指示的位置。如图3.88所示为初始位置和旋转60°位置。
 在下拉列表框中选择“加转速”选项,如图3.89所示,“伺服电动机定义”对话框在出现【初始角】选项组的同时,增加了一个【初始角转速】选项组,可以定义初始角转速的大小。
在下拉列表框中选择“加转速”选项,如图3.89所示,“伺服电动机定义”对话框在出现【初始角】选项组的同时,增加了一个【初始角转速】选项组,可以定义初始角转速的大小。
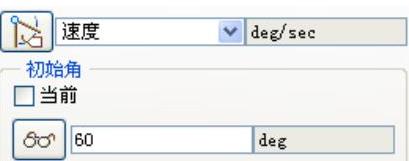
图3.87 “转速”选项
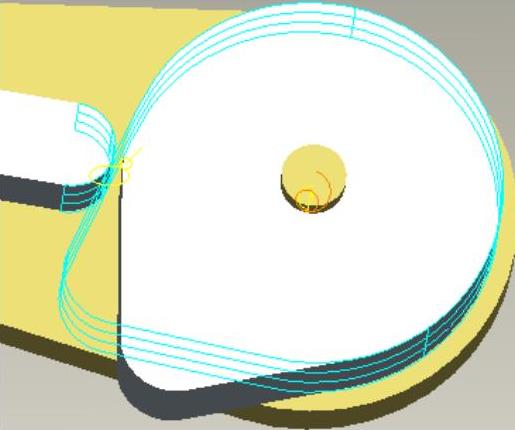
图3.88 选中后3D效果图

图3.89 “加转速”选项
(2)【模】选项组用于定义电动机的运动方程式。在下拉组框中有常数、余弦、斜坡、余弦、SCCA、摆线、抛物线、多项式、表、用户定义的等9种类型,选择每一种类型都有对应的对话框弹出。这几种类型如下:
 在【模】下拉列表框中选择“常数”选项,如图3.90所示,轮廓为恒定。只需在【A】文本框中键入数值,机构就以该数值建立的方程式q=A(其中A为常数)为机构运动方程式。
在【模】下拉列表框中选择“常数”选项,如图3.90所示,轮廓为恒定。只需在【A】文本框中键入数值,机构就以该数值建立的方程式q=A(其中A为常数)为机构运动方程式。
 在【模】下拉列表框中选择“斜坡”选项,如图3.91所示轮廓随时间做线性变化。只需在【A】、【B】文本框中键入数值,机构就以该数值建立的方程式q=A+B×X(其中A为常数,B为斜率)为机构运动方程式。
在【模】下拉列表框中选择“斜坡”选项,如图3.91所示轮廓随时间做线性变化。只需在【A】、【B】文本框中键入数值,机构就以该数值建立的方程式q=A+B×X(其中A为常数,B为斜率)为机构运动方程式。
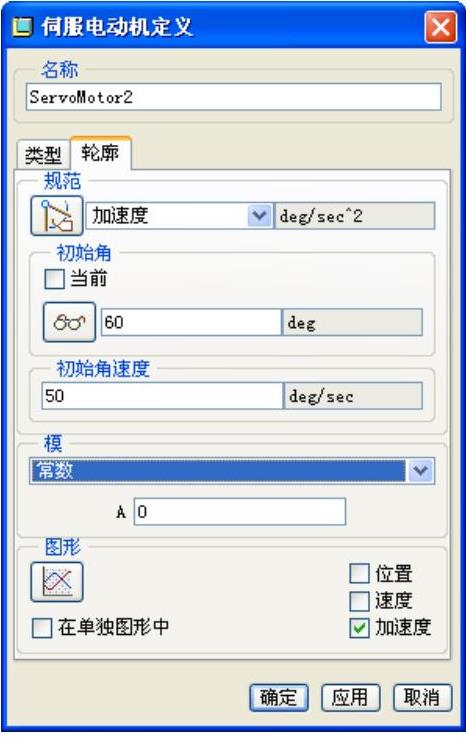
图3.90 “常数”选项
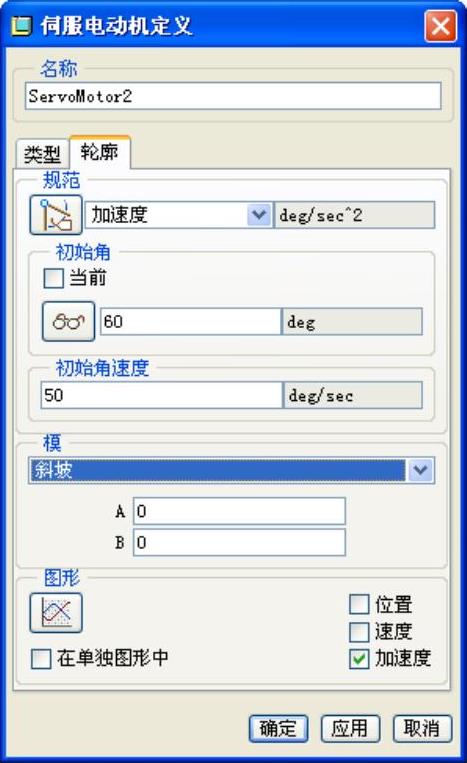
图3.91 “斜坡”选项
 在【模】下拉列表框中选择“余弦”选项,如图3.92所示,轮廓为余弦曲线。只需在【A】、【B】、【C】、【T】文本框中键入数值,机构就以该数值建立的方程式q=A×cos(360×X/T+B)+C(其中A为振幅,B为相位,C为偏移量,T为周期)为机构运动方程式。
在【模】下拉列表框中选择“余弦”选项,如图3.92所示,轮廓为余弦曲线。只需在【A】、【B】、【C】、【T】文本框中键入数值,机构就以该数值建立的方程式q=A×cos(360×X/T+B)+C(其中A为振幅,B为相位,C为偏移量,T为周期)为机构运动方程式。
 在【模】下拉列表框中选择“SCCA”选项,如图3.93所示,用于凸轮轮廓输出。当选择该选项时,对话框自动选择加转速为规范,且变为灰色不可选状,只需在【A】、【B】、【H】、【T】文本框中键入数值。
在【模】下拉列表框中选择“SCCA”选项,如图3.93所示,用于凸轮轮廓输出。当选择该选项时,对话框自动选择加转速为规范,且变为灰色不可选状,只需在【A】、【B】、【H】、【T】文本框中键入数值。
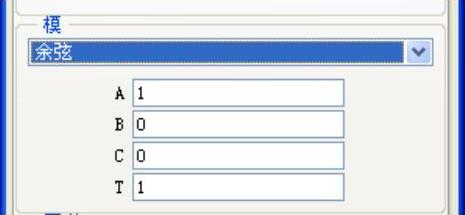
图3.92 “余弦”选项
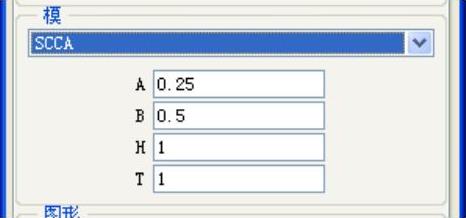
图3.93 “SCCA”选项
 在【模】下拉列表框中选择“摆线”选项,如图3.94所示,模拟凸轮轮廓输出。只需在【L】、【T】文本框中键入数值,机构就以该数值建立的摆线方程式q=L×X/T-L×sin(2×π×X/T)/2×π(其中L为总高度,T为周期)为机构运动方程式。
在【模】下拉列表框中选择“摆线”选项,如图3.94所示,模拟凸轮轮廓输出。只需在【L】、【T】文本框中键入数值,机构就以该数值建立的摆线方程式q=L×X/T-L×sin(2×π×X/T)/2×π(其中L为总高度,T为周期)为机构运动方程式。
 在【模】下拉列表框中选择“抛物线”选项,如图3.95所示,模拟电动机的轨迹为抛物线。只需在【A】、【B】文本框中键入数值,机构就以该数值建立的抛物线方程式q=A×X+1/2BX2(其中A为线性系数,B为二次项系数)为机构运动方程式。
在【模】下拉列表框中选择“抛物线”选项,如图3.95所示,模拟电动机的轨迹为抛物线。只需在【A】、【B】文本框中键入数值,机构就以该数值建立的抛物线方程式q=A×X+1/2BX2(其中A为线性系数,B为二次项系数)为机构运动方程式。

图3.94 “摆线”选项
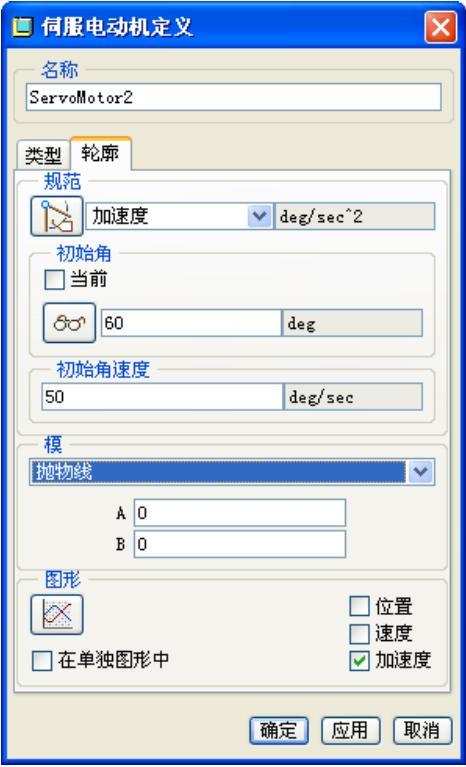
图3.95 “抛物线”选项
 在【模】下拉列表框中选择“多项式”选项,如图3.96所示,用于一般电动机轮廓。只需在【A】、【B】、【C】、【D】文本框中键入数值,机构就以该数值建立的多项式方程式q=A+B×X+C×X2+D×X3(其中A为常数,B为线性项系数,C为二次项系数,D为3次项系数)为机构运动方程式。
在【模】下拉列表框中选择“多项式”选项,如图3.96所示,用于一般电动机轮廓。只需在【A】、【B】、【C】、【D】文本框中键入数值,机构就以该数值建立的多项式方程式q=A+B×X+C×X2+D×X3(其中A为常数,B为线性项系数,C为二次项系数,D为3次项系数)为机构运动方程式。
 在【模】下拉列表框中选择“表”选项,如图3.97所示。
在【模】下拉列表框中选择“表”选项,如图3.97所示。
(1)勾选【使用外部文件】复选按钮,单击【打开】按钮 ,选择外部表。
,选择外部表。
(2)右侧【向表中添加行】按钮 用于在表中添加一行,【从表中删除行】按钮
用于在表中添加一行,【从表中删除行】按钮 用于从表中删除选中的行。(https://www.xing528.com)
用于从表中删除选中的行。(https://www.xing528.com)
(3)单击【打开】按钮 ,选择扩展名为“*.tab”的机械表数据文件。该文件包括“时间”栏和“模”栏,时间是电动机运行的时间段,在“模”栏中是电动机的参数,包括位置、转速、加转速等。需要用记事本编辑,如图3.98所示,编辑后保存扩展名为“.tab”的文件。
,选择扩展名为“*.tab”的机械表数据文件。该文件包括“时间”栏和“模”栏,时间是电动机运行的时间段,在“模”栏中是电动机的参数,包括位置、转速、加转速等。需要用记事本编辑,如图3.98所示,编辑后保存扩展名为“.tab”的文件。
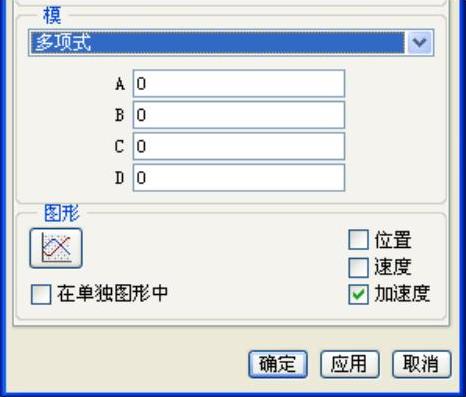
图3.96 “多项式”选项

图3.97 “表”选项
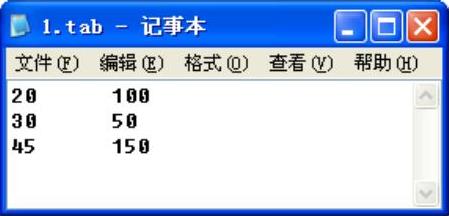
图3.98 表编辑
(4)单击【从文件导入数据表】工具按钮 ,系统将打开的机械数据表文件加载到列表框中,单击【将表数据导出到文件】工具按钮
,系统将打开的机械数据表文件加载到列表框中,单击【将表数据导出到文件】工具按钮 ,系统将列表框中的表导出到机械数据表文件中。
,系统将列表框中的表导出到机械数据表文件中。
 在【模】下拉列表框中选择“多项式”选项,如图3.99所示,用于定义自定义轮廓。
在【模】下拉列表框中选择“多项式”选项,如图3.99所示,用于定义自定义轮廓。
(1)【添加表达式段】工具按钮 用于在列表框中添加表达式;
用于在列表框中添加表达式;
(2)【删除表达式段】工具按钮 用于将选中列表框中的表达式删除;
用于将选中列表框中的表达式删除;
(3)【编辑表达式段】工具按钮 用于编辑选中列表中的表达式段。单击该工具按钮,系统弹出“表达式定义”对话框,如图3.100所示。
用于编辑选中列表中的表达式段。单击该工具按钮,系统弹出“表达式定义”对话框,如图3.100所示。
图3.99 “用户定义的”选项
图3.100 “表达式定义”对话框
4.【图形】选项组
【图形】选项组,如图3.101所示,它是以图形形式表示轮廓,使之以更加直观的形式来查看。
 【绘制所选电动机轮廓相对于时间的图形】工具按钮
【绘制所选电动机轮廓相对于时间的图形】工具按钮 用于显示“图形工具”对话框,如图3.102所示。
用于显示“图形工具”对话框,如图3.102所示。
图3.101 【图形】选项组
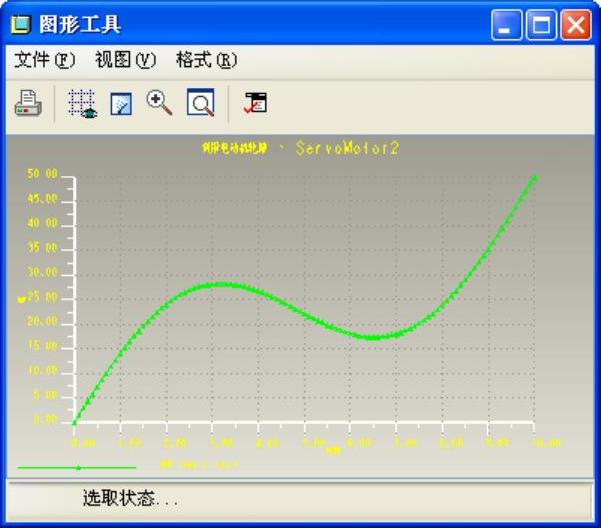
图3.102 抛物线位置图
(1)【打印图形】工具按钮 用于打印当前图中的图形。
用于打印当前图中的图形。
(2)【切换栅格线】工具按钮 用于切换当前图形工具中是否显示栅格,单击该工具按钮图3.102所示图形就取消栅格显示,效果如图3.103所示。
用于切换当前图形工具中是否显示栅格,单击该工具按钮图3.102所示图形就取消栅格显示,效果如图3.103所示。
(3)【重画当前视图】工具按钮 用于将当前视图中图形重新生成。
用于将当前视图中图形重新生成。
(4)【放大】工具按钮 用于将图形放大,有利于进行观察。
用于将图形放大,有利于进行观察。
(5)【重新调整】工具按钮 用于重新调整当前视图中图形以合适的比例显示。
用于重新调整当前视图中图形以合适的比例显示。
(6)单击【格式化图形对话框】工具按钮 ,系统弹出“图形窗口选项”对话框,如图3.104所示。【Y轴】选项卡用于定义图形在Y轴方向的图形、轴标签、文本样式、栅格、轴等显示图元的显示设置;【X轴】选项卡用于定义图形在X轴方向的图形、轴标签、文本样式、栅格、轴等显示图元的显示设置;【数据系列】选项卡用于定义图形中X、Y轴数据、图例、文本样式等显示图元的显示设置;【图形显示】选项卡用于定义图形中标签、背景、曲线、文本样式等图形元素的显示设置。
,系统弹出“图形窗口选项”对话框,如图3.104所示。【Y轴】选项卡用于定义图形在Y轴方向的图形、轴标签、文本样式、栅格、轴等显示图元的显示设置;【X轴】选项卡用于定义图形在X轴方向的图形、轴标签、文本样式、栅格、轴等显示图元的显示设置;【数据系列】选项卡用于定义图形中X、Y轴数据、图例、文本样式等显示图元的显示设置;【图形显示】选项卡用于定义图形中标签、背景、曲线、文本样式等图形元素的显示设置。
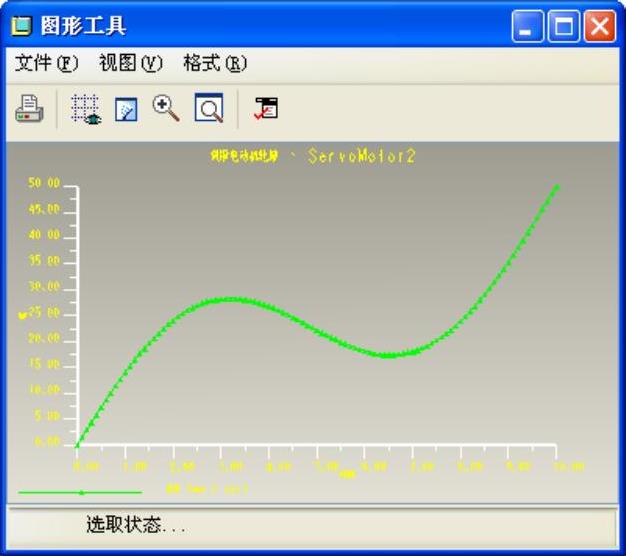
图3.103 不显示栅格

图3.104 “图形窗口选项”对话框
 【位置】复选框用于在图形中只显示出位置随时间的关系曲线。例如在【模】下拉列表框中选择“抛物线”选项,在【A】文本框中键入100,在【B】文本框中键入50,勾选【位置】复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮
【位置】复选框用于在图形中只显示出位置随时间的关系曲线。例如在【模】下拉列表框中选择“抛物线”选项,在【A】文本框中键入100,在【B】文本框中键入50,勾选【位置】复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮 ,系统弹出“图形工具”对话框,如图3.105所示。
,系统弹出“图形工具”对话框,如图3.105所示。
 【转速】复选框用于在图形中只显示出转速随时间的关系曲线。例如在【模】下拉列表框中选择“抛物线”选项,在【A】文本框中键入100,在【B】文本框中键入50,勾选【转速】复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮
【转速】复选框用于在图形中只显示出转速随时间的关系曲线。例如在【模】下拉列表框中选择“抛物线”选项,在【A】文本框中键入100,在【B】文本框中键入50,勾选【转速】复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮 ,系统弹出“图形工具”对话框,如图3.106所示。
,系统弹出“图形工具”对话框,如图3.106所示。
【加转速】复选框用于在图形中只显示出随时间的关系曲线,例如在【模】下拉列表框中选择“抛物线”选项,在【A】文本框中键入100,在【B】文本框中键入50,勾选【加转速】复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮 ,系统弹出“图形工具”对话框,如图3.107所示。
,系统弹出“图形工具”对话框,如图3.107所示。
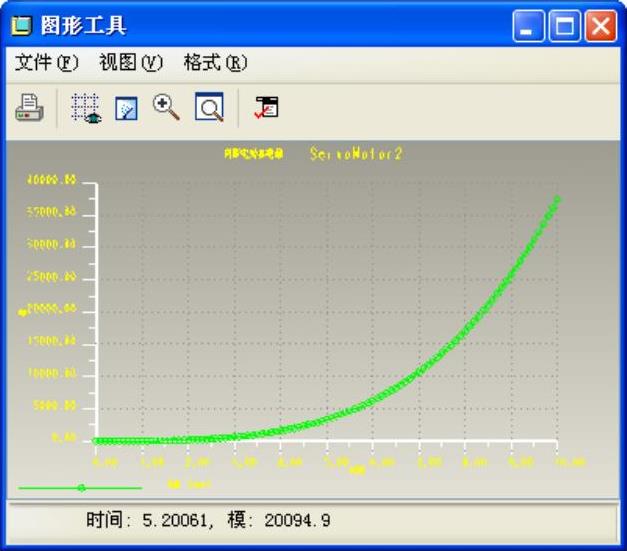
图3.105 抛物线位置轮廓
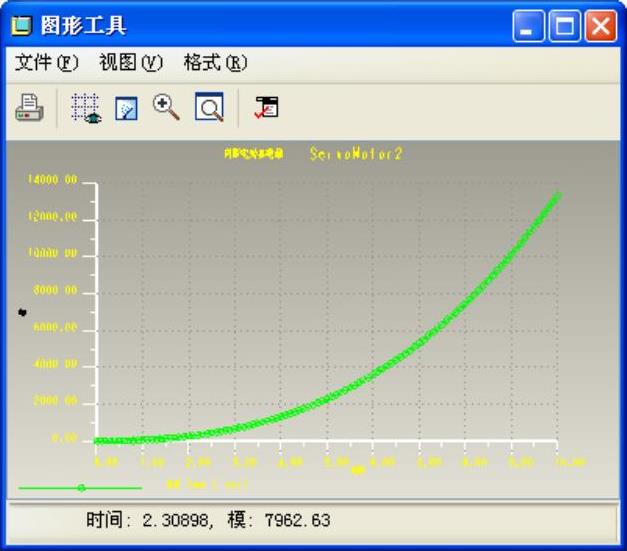
图3.106 抛物线转速轮廓
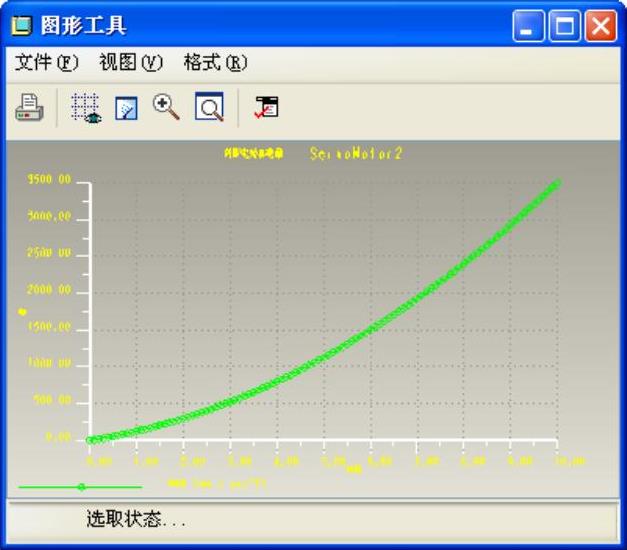
图3.107 抛物线加转速轮廓
 【在单独图形中】复选框用于3种曲线在单独的图形中显示,取消可以在一个坐标系中显示。下面以模为抛物线为例讲解【在单独图形中】复选框与【位置】、【转速】、【加转速】复选框的组合使用效果。
【在单独图形中】复选框用于3种曲线在单独的图形中显示,取消可以在一个坐标系中显示。下面以模为抛物线为例讲解【在单独图形中】复选框与【位置】、【转速】、【加转速】复选框的组合使用效果。
(1)打开3.2.1小节中凸轮例子tulun.asm。
(2)单击“模型”工具栏上的【伺服电动机定义】工具按钮 ,系统弹出“伺服电动机定义”对话框。
,系统弹出“伺服电动机定义”对话框。
(3)点选【类型】选项卡中【运动轴】单选按钮,系统弹出“选取”对话框,在3D模型选取连接轴,单击【确定】按钮。
(4)单击【轮廓】选项卡,在【模】下拉列表框中选择“抛物线”选项,【A】文本框中键入100,【B】文本框中键入50。
(5)勾选【位置】、【转速】和【加转速】3个复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮 ,系统弹出“图形工具”对话框,效果如图3.108所示。
,系统弹出“图形工具”对话框,效果如图3.108所示。
(6)关掉该对话框,在“伺服电动机定义”对话框中勾选【在单独图形中】复选框,单击【绘制所选电动机轮廓相对于时间的图形】工具按钮 ,系统弹出“图形工具”对话框,效果如图3.109所示。
,系统弹出“图形工具”对话框,效果如图3.109所示。
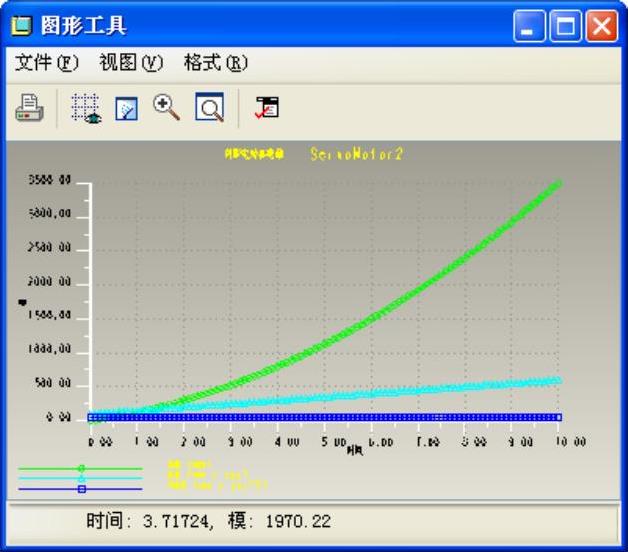
图3.108 抛物线位置-转速-加转速轮廓
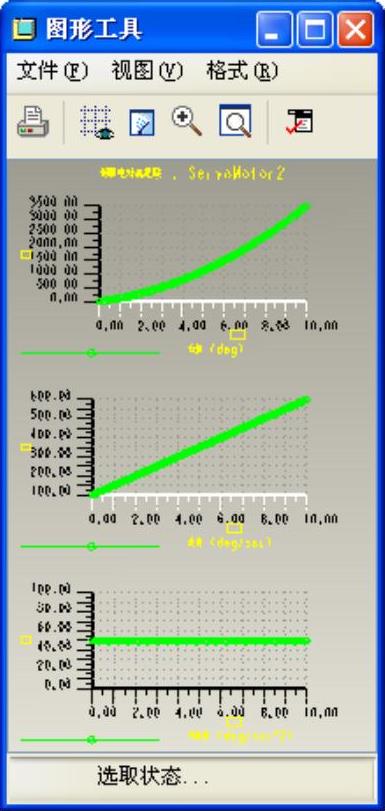
图3.109 抛物线位置-转速-加转速轮廓
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。