



【摘要】:工具,即6自由度,也就是对元件不作任何约束,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件发生关联。下面以两块钢板为例,讲解工具的使用方法。单击“工程特征”工具栏上的工具按钮,在系统弹出的“打开”对话框中,选择DT0001.PRT将其加载到当前工作台中。在3D图中选择元件DT0001.PRT和元件PRT0002.PRT的坐标系。在文本框显示“完成连接定义”,单击按钮,6DOF连接创建完成。图3.26 6DOF连接放置对话框
【6DOF】工具 ,即6自由度,也就是对元件不作任何约束,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件发生关联。元件可任意旋转和平移,具有3个旋转自由度和3个平移自由度,总自由度为6。
,即6自由度,也就是对元件不作任何约束,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件发生关联。元件可任意旋转和平移,具有3个旋转自由度和3个平移自由度,总自由度为6。
下面以两块钢板为例,讲解【6DOF】工具的使用方法。
(1)单击“工程特征”工具栏上的【装配】工具按钮 ,在系统弹出的“打开”对话框中,选择DT0001.PRT将其加载到当前工作台中。
,在系统弹出的“打开”对话框中,选择DT0001.PRT将其加载到当前工作台中。
(2)在连接下拉列表框中选择“用户自定义”选项,然后在其后的约束下拉列表框中选择“固定”选项,或者单击【放置】工具按钮,在弹出的“放置”对话框中【约束类型】下拉列表框中选择“固定”选项。
(3)单击【完成】按钮 ,完成主体的固定。
,完成主体的固定。
(4)单击“工程特征”工具栏上的【装配】工具按钮 ,在系统弹出的“打开”对话框中,选择PRT0002.PRT将其加载到当前工作台中。
,在系统弹出的“打开”对话框中,选择PRT0002.PRT将其加载到当前工作台中。
(5)在连接下拉列表框中选择“6DOF”选项,单击【放置】工具按钮,在弹出的“放置”对话框中已经添加了坐标系对齐约束,如图3.26所示。(https://www.xing528.com)
(6)在3D图中选择元件DT0001.PRT和元件PRT0002.PRT的坐标系。
(7)选中平移轴1,单击【动态属性】按钮,展开“扩展”对话框,在“扩展”对话框中设置还原系数和摩擦系数。
(8)使用同样的方法设置平移轴2和平移轴3的还原系数和摩擦系数。
(9)在【状态】文本框显示“完成连接定义”,单击【完成】按钮 ,6DOF连接创建完成。
,6DOF连接创建完成。
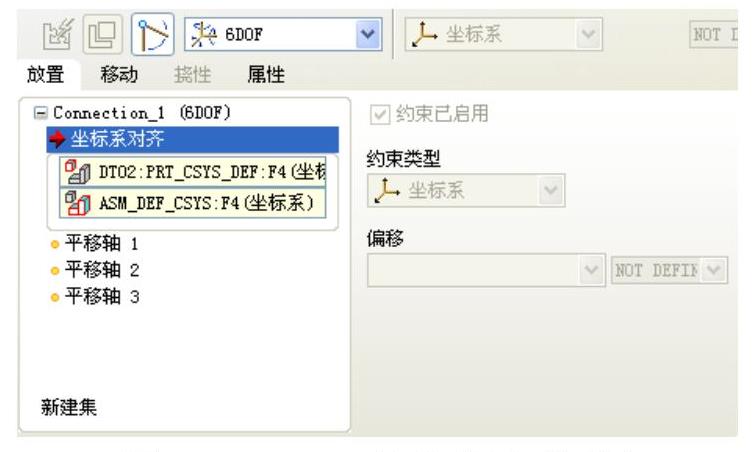
图3.26 6DOF连接放置对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。