



【摘要】:点焊机器人主要在大批量生产的汽车工业中焊接薄板结构。目前通用的弧焊机器人,可与熔化气体保护焊机、钨极氩弧焊机及空气等离子弧切割机相匹配,完成各种形状结构的CO2焊、MIG焊、TIG焊。
焊接机器人的出现,打破了过去焊接的传统方式,开拓了柔性自动化的新技术,使替代焊接自动化设备所不能完成的焊接生产成为现实。
焊接机器人分为点焊机器人、弧焊机器人及切割机器人三类。
1.焊接机器人的工作原理
机器人是指可以反复编程的多功能操作机。焊接机器人的基本工作原理是示教再现,而对环境的变化没有应变能力。对焊接机器人的控制,首先由用户引导机器人,一步步按实际任务操作一遍,机器人在引导过程中自动记忆示教的每个动作的位置、运动方式、摆动方式、焊接姿态、焊接工艺参数,及周边设备的运动速度和焊接工艺动作(包括引弧、施焊、熄弧、填充弧坑等),并自动生成一个连续执行全部操作的程序。示教完毕,只需给机器人一个启动命令,机器人将精确地按示教动作,进行实际焊接操作。
2.焊接机器人的特点
1)可稳定提高焊接质量,保证其均匀性,并可一天24h连续生产,因此生产效率较高。
2)可实现小批量产品焊接自动化,并能缩短产品改型换代的准备周期,减少相应的设备投资。
3)降低了对工人的操作技术要求,并能改善工人的劳动条件,在有害环境能长期工作。(https://www.xing528.com)
4)为焊接柔性生产线提供技术基础。
3.焊接机器人的应用
焊接机器人已应用于电阻点焊、电弧焊、切割和热喷涂等焊接方法中。点焊机器人主要在大批量生产的汽车工业中焊接薄板结构。
目前通用的弧焊机器人,可与熔化气体保护焊机、钨极氩弧焊机及空气等离子弧切割机相匹配,完成各种形状结构的CO2焊、MIG焊、TIG焊。
焊接机器人一般由操作机、控制器及焊机三部分组成,图6-9所示为弧焊机器人的一般组成。
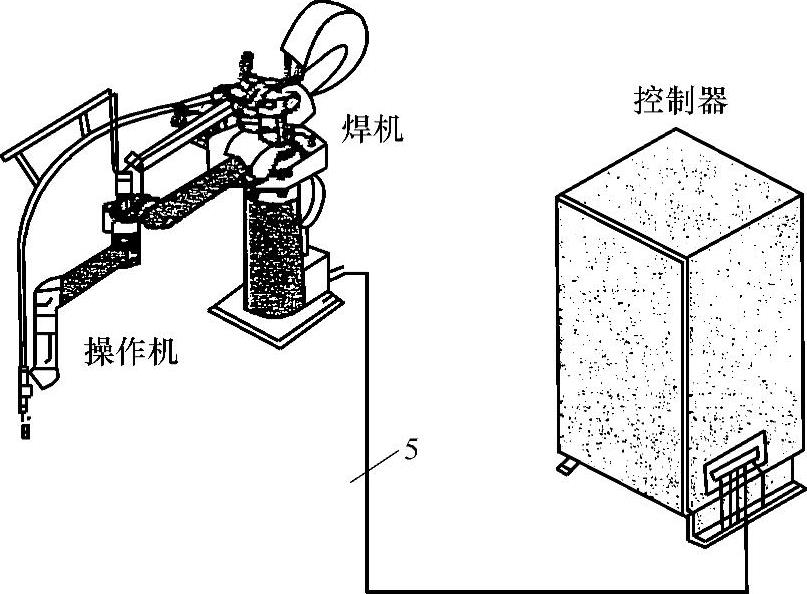
图6-9 弧焊机器人的组成图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。