



在运动仿真模块中,与“机构”相关的操作命令主要位于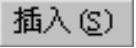 下拉菜单中,如图10.1.1所示。
下拉菜单中,如图10.1.1所示。
图10.1.1 “插入”下拉菜单
进入到运动仿真模块,在“主页”功能选项卡及“分析”功能选项卡中列出了运动仿真常用的命令按钮,如图10.1.2及图10.1.3所示。

图10.1.2 “主页”功能选项卡

图10.1.3 “分析”功能选项卡
注意:在“运动导航器”中右击 ,在快捷菜单中选择
,在快捷菜单中选择 命令,在系统弹出的“新建仿真”对话框中单击
命令,在系统弹出的“新建仿真”对话框中单击 按钮接受默认的仿真文件名称;然后在弹出的“环境”对话框中单击
按钮接受默认的仿真文件名称;然后在弹出的“环境”对话框中单击 按钮,然后在系统弹出的“机构运动副向导”对话框中单击
按钮,然后在系统弹出的“机构运动副向导”对话框中单击 或
或 按钮,此时运动仿真模块的所有命令才被激活。
按钮,此时运动仿真模块的所有命令才被激活。
图10.1.2所示“主页”功能选项卡中各按钮的说明如下:
● :创建一个新解算方案,其中定义了分析类型、解算方案类型以及特定于解算方案的载荷和运动驱动。
:创建一个新解算方案,其中定义了分析类型、解算方案类型以及特定于解算方案的载荷和运动驱动。
● :创建求解运动和解算方案并生成结果集。
:创建求解运动和解算方案并生成结果集。
● :用于定义机构中刚性体的部件。
:用于定义机构中刚性体的部件。
● :用于定义机构中连杆之间的受约束的情况。
:用于定义机构中连杆之间的受约束的情况。
● :为机构中的运动副创建一个独立的驱动。
:为机构中的运动副创建一个独立的驱动。
● :用于创建一个标记,该标记必须位于需要分析的连杆上。
:用于创建一个标记,该标记必须位于需要分析的连杆上。
● :用于定义两个旋转副之间的相对旋转运动。(https://www.xing528.com)
:用于定义两个旋转副之间的相对旋转运动。(https://www.xing528.com)
● :在两个连杆之间、连杆和框架之间创建一个柔性部件,使用运动副施加力或转矩。
:在两个连杆之间、连杆和框架之间创建一个柔性部件,使用运动副施加力或转矩。
● :在两个连杆、一个连杆和框架、一个可平移的运动副或在一个旋转副上创建一个反作用力或转矩。
:在两个连杆、一个连杆和框架、一个可平移的运动副或在一个旋转副上创建一个反作用力或转矩。
● :创建圆柱衬套,用于在两个连杆之间定义柔性关系。
:创建圆柱衬套,用于在两个连杆之间定义柔性关系。
● :在一个体和一个静止体、在两个移动体或一个体来支撑另一个体之间定义接触关系。
:在一个体和一个静止体、在两个移动体或一个体来支撑另一个体之间定义接触关系。
● :将连杆上的一个点与曲线建立接触约束。
:将连杆上的一个点与曲线建立接触约束。
● :将连杆上的一条曲线与另一曲线建立接触约束。
:将连杆上的一条曲线与另一曲线建立接触约束。
● :将连杆上的一个点与面建立接触约束。
:将连杆上的一个点与面建立接触约束。
● :用于在两个连杆或在一个连杆和框架之间创建标量力。
:用于在两个连杆或在一个连杆和框架之间创建标量力。
● :在围绕旋转副和轴之间创建标量转矩。
:在围绕旋转副和轴之间创建标量转矩。
● :定义该机构中的柔性连接。
:定义该机构中的柔性连接。
图10.1.3所示“分析”功能选项卡中各按钮的说明如下:
● :用于检测整个机构是否与选中的几何体之间在运动中存在碰撞。
:用于检测整个机构是否与选中的几何体之间在运动中存在碰撞。
● :用于检测计算运动中的每一步中两组几何体之间的最小距离或最小夹角。
:用于检测计算运动中的每一步中两组几何体之间的最小距离或最小夹角。
● :在运动的每一步创建选中几何体对象的副本。
:在运动的每一步创建选中几何体对象的副本。
● :根据机构在指定时间内的仿真步数,执行基于时间的运动仿真。
:根据机构在指定时间内的仿真步数,执行基于时间的运动仿真。
● :用于验证所有运动对象。
:用于验证所有运动对象。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。