



1.直流直线电动机
直流直线电动机的基本结构如图2-24所示。该电动机的定子一般由永久磁铁构成。动子由硅钢片叠装或其他电磁材料构成。动子上开有凹槽,其中嵌有动子绕组。与动子固联的输出杆由直线轴承支承,可将动子产生的电磁力输出,以推动刀具或机床运动部件运动。当动子绕组的线圈按图2-24所示通入直流电流时,根据左手定则,将产生向右的推力。若通入的电流方向相反,则输出的电磁力的方向也将相反。因此,改变动子绕组电流的大小和方向即可控制直流直线电动机输出力的大小和方向。
根据电机学理论可导出直线电动机的稳态速度公式为

式中,U是稳态时动子绕组端电压;I是稳态时动子绕组电流;R是动子绕组电阻;Ce是反电动势常数;Φ是主磁通;v是稳态时动子运动速度。
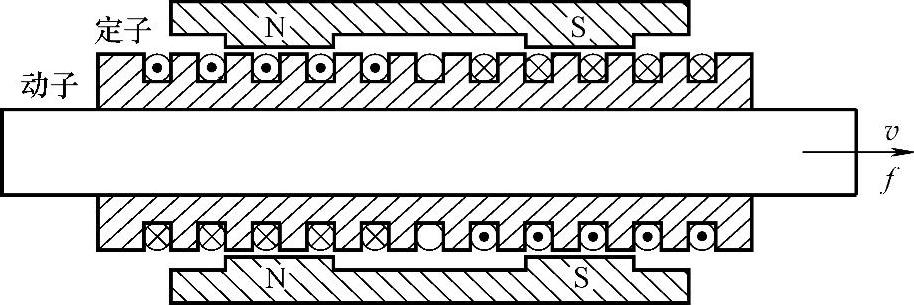
图2-24 直流直线电动机的基本结构
在采用永久磁铁励磁时,Φ为常数,因此,只要改变绕组端电压U,即可实现直流直线电动机的调速。
根据直流直线电动机的电磁力fd的计算公式

式中,Cf是电磁力常数;Φ是主磁通;I是动子绕组电流。
因为Φ为常数,电磁力fd将正比于动子绕组电流I,调节I即可实现对直流直线电动机的电磁力的直接控制,从而使直流直线电动机易于获得很高的控制性能。这是这类电动机最大的优点。
由直流直线电动机构成的进给驱动系统具有一些显著优点:运动速度快、加速度快、结构简单、制造成本低。但这类系统也存在比较严重的缺点,就是运动行程较短。因此,直流直线电动机一般常用来作为高速数控车床X轴的进给驱动,如:中凸变椭圆活塞车床、立体靠模和凸轮车床等的驱动。这类机床的特点是,X轴需高速、高加速度运动,但移动行程并不长。常规旋转电动机加滚珠丝杠螺母传动的方案难以满足要求,而直流直线电动机驱动系统正好有用武之地。
2.交流永磁同步直线电动机
交流永磁同步直线电动机的基本结构如图2-25所示,主要由定子、动子、支撑装置和检测环节4部分组成。其中,定子由硅钢片叠装构成,在其上开有线槽,槽内嵌入三相多极绕组。动子也由硅钢片叠装组成,如果涡流损耗不是特别严重,也可用电工纯铁等代替硅钢片叠装体以简化动子结构。在动子上沿运动方向等间隔安装永磁体。一般情况下,电动机支撑装置可与机床共用,如:支撑工作台的直线滚动导轨等。检测环节采用高精度光栅、磁效应检测装置等,只不过要求其响应速度比常规数控机床要高得多。检测环节的作用是:一方面为直线电动机控制提供动子磁极位置信息,另一面对机床运动部件的实际位移进行精确检测,以实现对机床运动的全闭环控制。
在图2-25所示结构中,直线电动机定子与动子间除了驱动机床运动所需的切向电磁力外,还存在强大的法向电磁吸力。由于电磁吸力的方向与动子运动方向垂直,因此,将直接作用于机床工作台和导轨上,会对直线电动机和机床的工作产生不利影响。为消除或减小电磁吸力的不利影响,可采用多电动机对称结构,以使电磁吸力互相抵消。
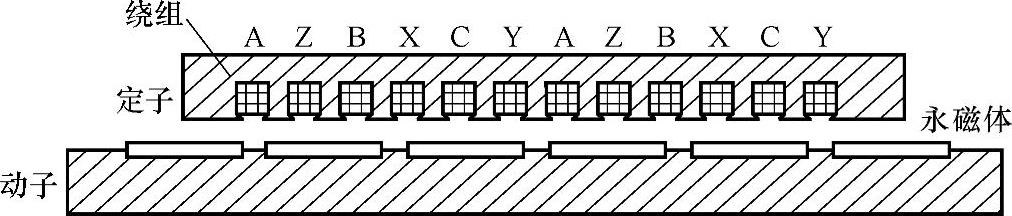
图2-25 交流永磁同步直线电动机的基本结构
如上所述,交流永磁同步直线电动机的定子中嵌有对称三相绕组,因此,当由逆变器向此绕组中通入有效值为I,角频率为ω的三相正弦电流时,将产生合成磁动势

式中,Fm是相绕组磁动势幅值;α是空间角。
该合成磁动势是沿电动机运动方向的行波,其移动速度为

式中,f0是逆变器输出电流的频率;τ是直线电动机极距。
此合成磁动势产生的行波磁场是交流永磁同步直线电动机的根本动力。
在交流永磁同步直线电动机的定子绕组中通入对称三相交流电流后,将产生沿电动机运动方向的行波磁场。该行波磁场可用以速度v0运动的磁铁进行模拟,如图2-26所示。根据磁极异性相吸的特性,定子行波磁场的磁极N、S将分别与动子永久磁场的磁极S、N相吸,行波磁场的磁极与动子永久磁场的磁极间必然存在磁拉力。这样,当定子行波磁场的磁极以速度v0运动时,在各对相互吸引的磁极间的磁拉力共同作用下,动子将得到一个合力,该力将克服动子所受阻力(负载等)而带动动子运动。这种驱动动子克服外力而运动的力即为交流永磁同步直线电动机输出的电磁力。通过对定子行波磁场的运动进行合理控制,即可产生所要求的磁拉力带动动子平稳运动。
由于永磁同步直线电动机在稳态同步运行时,其动子磁极与定子行波磁场的磁极是一一对应的,因此,电动机动子的稳态运动速度v将与定子行波磁场的运动速度相同,即v=v0。
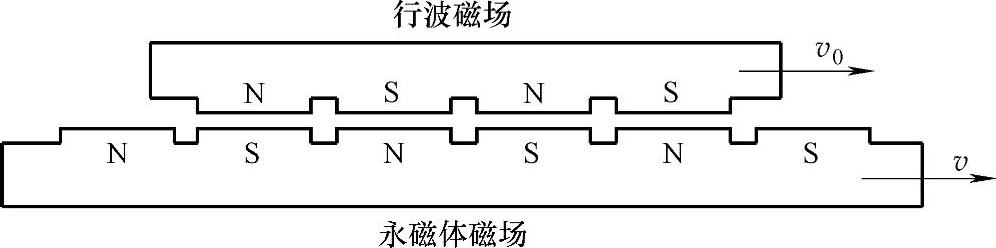
图2-26 交流永磁同步直线电动机工作原理示意图
交流永磁同步直线电动机进给驱动系统具有以下优点。
①运动行程长,理论上可以做到无限长。
②效率和功率因数高,低速出力大,电动机体积较小。
③控制较简单。(https://www.xing528.com)
这类系统的缺点为以下几点:
①耗费永磁材料较多,电动机成本高;
②永磁体形成强磁场,防磁困难;
③当电动机置于机腹腔时,散热困难,一般需加冷却管路,通过专用冷却液循环进行强制散热,这将增加结构复杂性,提高机床成本。
3.交流异步直线电动机
交流异步直线电动机的结构与交流永磁同步直线电动机相类似,其定子结构基本相同,但动子结构有较大差别。机床进给驱动用交流异步直线电动机的动子(一般由硅钢片叠装或其他导磁材料构成)。动子上开有凹槽,其中嵌有导条或绕组,如图2-27所示。交流异步直线电动机的定子和动子分别与机床的固定和移动部件直接连接(对应关系视具体情况而定)。一般采用高精度光栅、感应同步器等作为检测装置,以保证闭环控制的实现。

图2-27 交流异步直线电动机的基本结构
现通过以下步骤,并结合图2-28说明交流异步直线电动机中电磁力的产生及其定量表示。
①当逆变器向定子绕组通入对称三相交流电流时,将产生行波磁场。由于动子上不存在永磁体,动子位移与定子行波磁场间不存在强制的同步关系,由此造成动子运动与定子行波磁场间存在速度差。
②由于此速度差的存在,动子上的导体将切割行波磁场的磁力线。根据电磁感应定律,动子导体内会产生感应电动势,并且由于动子导体是闭合的,由此将形成感应电流,其方向用右手定则判定,如图2-28所示。
③根据电磁力定律,处于磁场中的载流导体将受到电磁力作用,电磁力方向可用左手定则判定,其是与定子行波磁场移动方向相同的力F。在F作用下,动子将与行波磁场同向运动,输出电磁力而做功。

图2-28 交流异步直线电动机工作原理示意图
④根据电机学理论,可导出电磁力公式

式中,CF是电磁力常数;ΦΣ是气隙主磁通;I2′是归算后的动子电流;φ2′是归算后的动子功率因素角。
动子与行波磁场间存在速度差,是异步直线电动机运行的必要条件。通常用速差率S来表示动子与行波磁场间速度差的大小,其定义为

根据S,可将动子稳态运动速度(mm/s)用下式给出
v=v0(1-S)=2f0τ(1-S)(2-40)
一般情况下,异步直线电动机的速差率变化范围有限,因此,通常可通过改变定子绕组供电频率的方法来调节动子的移动速度,从而实现这类直线电动机的稳态调速。
但是,这种变频调速方法并不能对异步直线电动机的瞬时速度进行精确控制,更谈不上实现其位置的精确控制。如同直流直线电动机一样,要对异步直线电动机实现精确的动态速度控制和位置控制,必须对其电磁力进行快速准确控制。
交流异步直线电动机驱动系统的主要优点为以下几方面。
①运动行程长,理论上可以做到无限长。
②电动机结构简单,不需永磁材料,制造容易,成本较低。
③防磁比较容易。
这类系统的主要缺点为以下几方面。
①效率和功率因数较低,所需逆变器容量比同功率的交流永磁同步直线电动机大。
②控制复杂。
③当电动机置于机床腹腔时,散热困难,一般须加冷却管路,通过专用冷却液循环进行强制散热,这将增加结构复杂性,提高机床成本。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。