



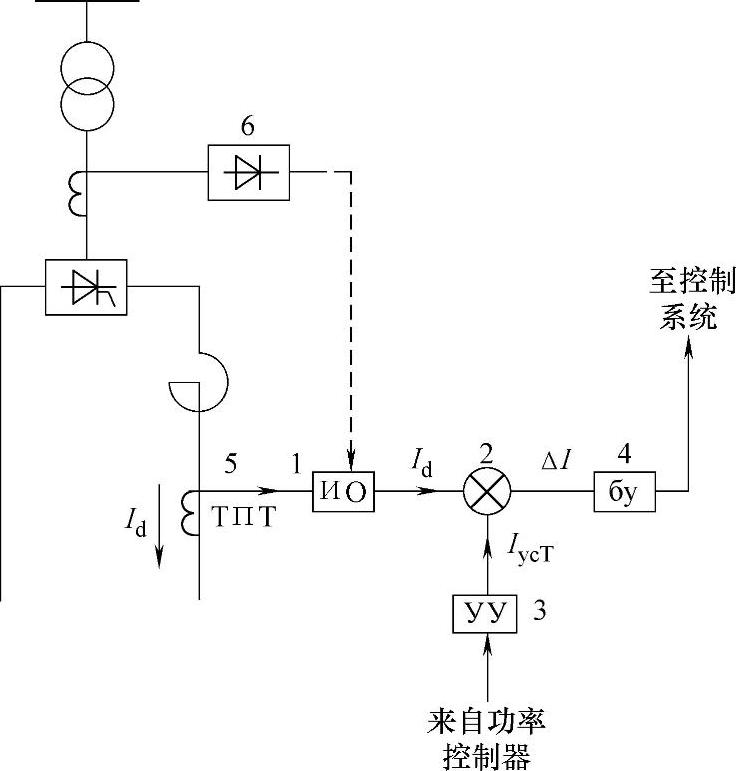
图11.18 电流控制器的结构
1—测量单元(ИО) 2—比较单元 3—整定装置(УУ) 4—放大和协调单元(БУ) 5—测量直流互感器(ТПТ) 6—辅助整流器
作为一种抑制系统不稳定工作的手段,整流器和逆变器在任何一种外特性倾斜度关系下,都可以使用电流控制器(РТ)。电流控制器也是直流输电线路和直流换流站所采用的、一次系统控制的最主要控制器之一(如下所示),其维持整流电流不变,在各种扰动情况下通过对整流器角度a的作用使得整流电流等于设定值。电流控制器的结构如图11.18所示。
电流控制器有测量线路极电流Id的单元1,施加正比于电流的信号到比较单元的一个入口上。在另一个入口上,由电流整定装置3施加另一个正比于整定电流的信号。整定电流是线路上应该维持的电流,整定电流值可以由运行人员按照传输功率曲线手动改变,或者是由功率控制器自动改变。
在比较单元的输出端,线路极电流和整定电流的差为
ΔI=Id-Iуст
此偏差经过放大和协调单元4施加到阀5的控制系统上,改变角度a。
当两个电流相等Id=Iуст时,其差值等于0,角度a是不变的。当线路上的电流偏离给定值时,在某一个方向出现的电流差值会引起角度a的变化,从而引起整流电压的改变。线路上的电流仍然是不变的,等于整定值。因此,如果不计及长输电线路中的波过程,在所有的输电线路事故工作状态下(逆变器翻转,线路上短路),线路上的电流仍旧是不变的,不会超过整定值。
可以通过两种方式施加当前整流电流值到测量单元的入口:
1)通过一次绕组连接到整流电流回路的直流互感器(ТПТ);
2)通过整流变压器阀绕组侧交流回路中的普通电流互感器(此时要求借助于辅助整流器6对这些电流互感器的二次侧电流进行整流)。
装设有电流控制器的整流器外特性,以及带有角度控制器的逆变器外特性如图11.19所示。
整流器的特性由两部分组成。当电流Id<Iуст时第一部分对应于a=0,由方程(10.60)决定,在此整流器没有被控制。在电流Id由0到Iуст变化以及a<0时,整流器的输出电压根据方程(10.60)变化。
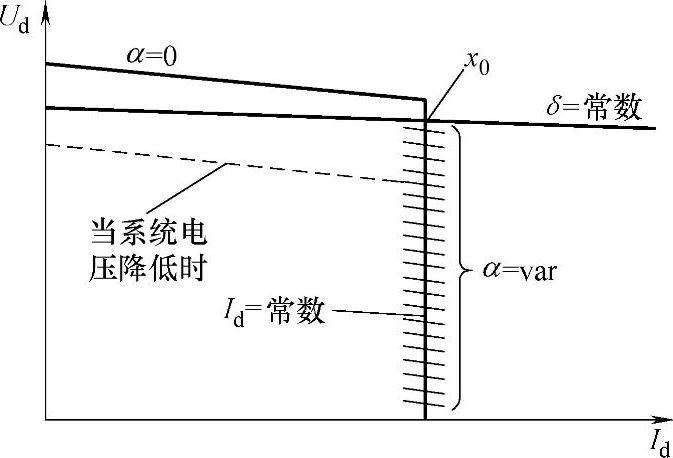
图11.19 带有电流控制器的整流器和带有 δ=常数控制器的逆变器特性
整流器特性的第二部分实际上是垂直的,是电流控制器起作用的阶段。对于理想控制器,垂度等于0,与Id轴垂直。对于实际控制器,垂度为2%~3%,略微偏离垂直线。这部分是对不同的a>0角度值以及电流不变时,整流器外部特性点的轨迹,因此线路上的电流仍然是不变的。当整流器上装设电流控制器时,整流器和逆变器特性斜率之间的关系没有意义。在图11.19上,当d=常数时的逆变器特性与整流器特性在电流控制器起作用的部分相交,此时工作点的选择是为了保障某个初始角a0=5°~10°,这也是当送端系统运行电压降低时为了保证Id=Iуст成立。在这种情况下,为了保持Ud в值,控制器应减小角度a。
应该指出,在上面指定的角度a0下,允许的电压降低仅仅是2%~3%。如果要增大此范围,则要求增加初始角度a0。但是,此时由于所需要的无功功率增加,整流器工作的经济性降低,要求装设额外的补偿装置。
在更剧烈、更大的送端系统电压降低时,由于惯性较大,不可能由变压器的有载调压装置动作补偿,输电线路将退出工作,因为整流器的电压小于逆变器的电压。这种情况如图11.19中的虚线所示。
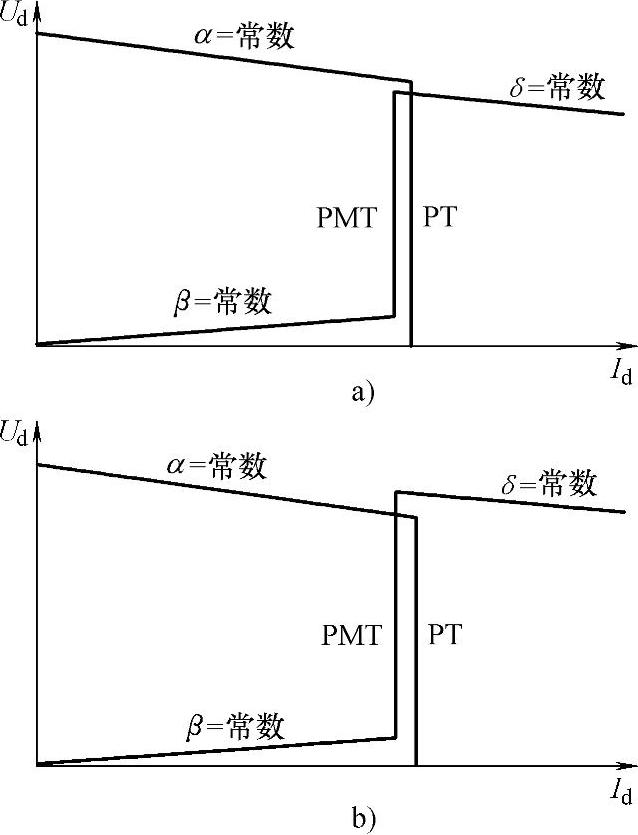
为了在类似的情况下使输电线路维持工作,必须足够快地降低逆变器的反电动势。这个问题由装设在逆变器上的极小电流控制器(РМТ)解决。此控制器的结构示意图与电流控制器是相同的。区别只是在于,此控制器只是当输电线路电流降低到某个给定值时才开始动作,此给定值由极小电流控制器的整定值确定。此时极小电流控制器作用在逆变器的控制系统上,角度b增大并且逆变器的反电动势增大。逆变器的外特性此时也几乎是垂直的,它是逆变器当b=常数和Id=常数时外部特性点的轨迹。当电压Ud较小时(通常是在逆变器翻转时),且当b=常数时,控制系统使逆变器过渡到不可控状态,从而使其过渡到额定工作状态。装设电流控制器、极小电流控制器和角度d控制器的整流器和逆变器的外部特性如图11.20所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图11.20 带有电流控制器的整流器和带有极小电流控制器的逆变器以及 d=常数控制器的特性
a)整流器状态 b)逆变器状态
极小电流控制器的整定电流通常等于0.9~0.95电流控制器的电流。如果电流控制器的整定电流变化(例如当输送功率变化时),则同时应当改变极小电流控制器的整定电流。这是自动进行的,这就要求当整流器和逆变器被输电线路分离时,必须有控制信道。对于直流换流站,当整流器和逆变器配置在一个变电站上时,不需要通信通道。
结果是输电线路极电流从两侧被限制,而不可能任意地超过或者低于给定值。只有为了改变输电线路状态,电流变化才可能预先设定。由于这个特性,直流输电线路和直流换流站在一个系统中排除了另外一个系统助增短路电流的可能性,降低了所连接系统的短路电流水平。此外,一个系统中的任何一个扰动(异步运行,摇摆)不能被传输到另一个系统中,这是非常重要的直流输电线路和直流换流站系统特性。
输电线路的工作电流由整流器和逆变器特性的交点确定(见图11.20),此时可能有两种协同工作的情况。
在一种情况下,输电线路的电流取决于整流器的电流控制器(见图11.20a)。输电线路的电压在给定角度d时取决于逆变器。如果d=dmin,交点对应输电线路的最大电压,当角度d增加时(根据角度b的增加),逆变器的特性曲线降低,并且相应地使输电线路的电压降低。此时整流器的电压仍然高于逆变器的电压。
在另一种情况下,当送端系统电压降低比较严重时,由逆变器的极小电流控制器维持电流的不变特性(图11.20b)。此时工作点分布在整流器特性的不可控部分,输电线路电压由整流器决定,而电流由逆变器决定,逆变器的电压比整流器的电压高。由图11.20b可以看出,相对于前一种情况,工作点对应于逆变器δ较大的角度值,导致逆变器需求的无功功率增加,即恶化了其电气性能。
一次(快速动作的)自动控制系统结构图如图11.21所示。
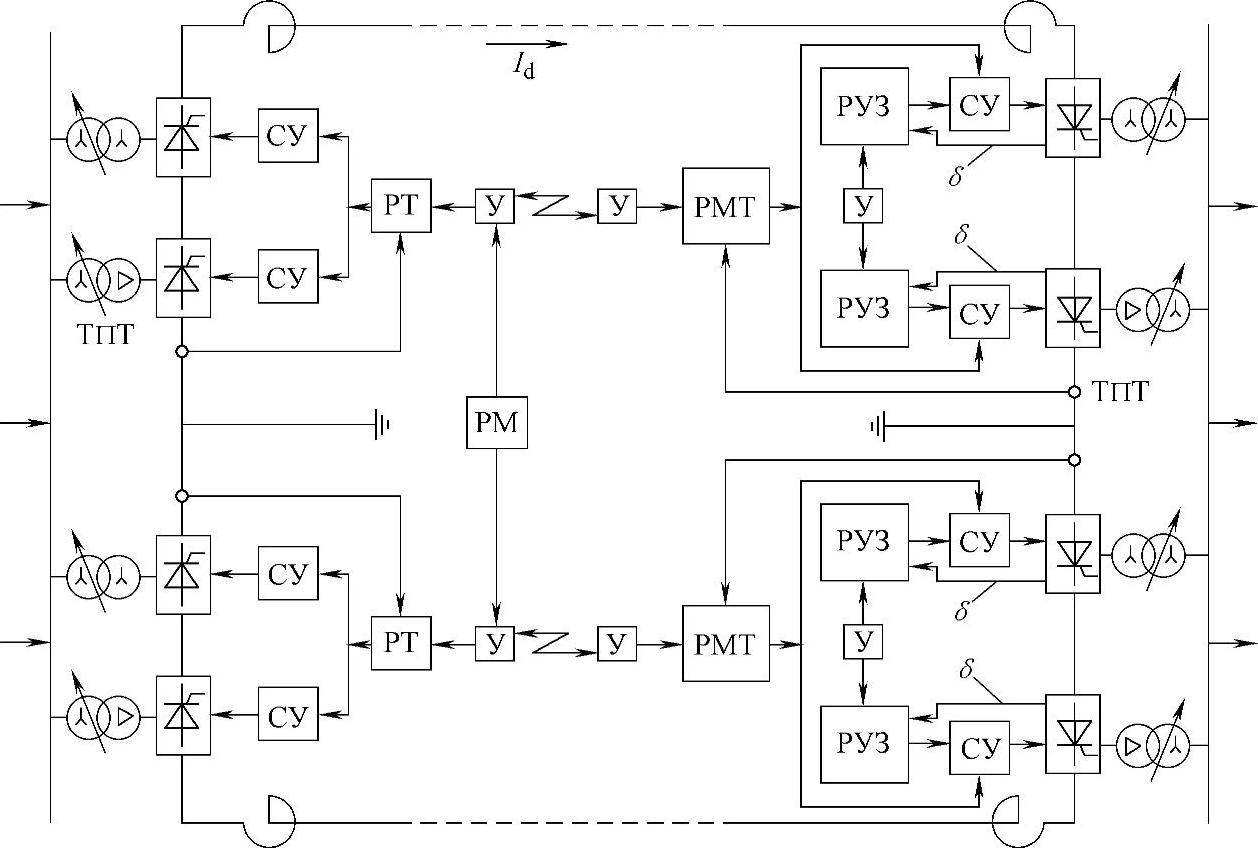
图11.21 直流输电线路自动控制系统结构图
СУ—阀控制系统 РТ—电流控制器 РМТ—极小电流控制器 У—整定装置 РУЗ—闭合角控制器(d=常数) РМ—功率控制器 ТПТ—测量直流电流互感器
二次控制系统包括:
1)作用于逆变变压器有载调压开关的电压控制器,其可以维持线路最高电压(在允许的界限内),降低损耗以及提高输电效率;
2)作用于变压器有载调压开关的整流器阀导通角控制器,其能够维持整流器阀导通角在给定值(a=5°~10°),并进一步降低整流器所需求的无功功率;
3)功率控制器,用于维持送端系统给定的负荷曲线恒定;
4)半回路电流控制器,用于补偿这些电流,降低输电线路零点电流(接地电流);
5)其他控制器。
类似一次控制系统,直流输电线路和直流换流站的二次控制系统既能够通过模拟化的方式来实现,又能够通过数字化的方式来实现(近年来是数字化实现)。此时,其结构和主要功能变化不大。
由于存在这些控制系统,直流输电线路是柔性的,是电力系统中的可控元件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。