



对线路电磁特性进行控制的目的就是改变线路的电抗和电纳,以满足电力系统状态的需要。这可以通过两种方式实现:第一种是双回线路结构的改变,其电抗和电纳取决于此线路回路两端电压相量的相位,此时实现了线路参数的分布补偿,这样的线路被称为可控自补偿架空线路(УСВЛ)。另一种方式是使用可控纵向补偿,与第8章所分析的相类似,但其应该具有可控电容器组和并联电抗器,以实现线路参数的集中补偿。
忽略非常复杂的数学问题,下面分析第一种方式的物理本质。其物理本质是,无论在塔架上还是跨越时,线路两个回路同名相导线之间的距离比相间距离小得多(d<D)(见图9.9a)。相比于传统的双塔架回路分布,此时回路之间的互阻抗显得非常大。
线路每一分段上每根导线的等值电抗由下列表达式确定:
xэ=xi+xм(β) (9.4)
式中 xi——不考虑互感时每一导线的阻抗;
xм——由双回路互感确定的阻抗;
b——每个回路电流(磁通)之间的相角差。
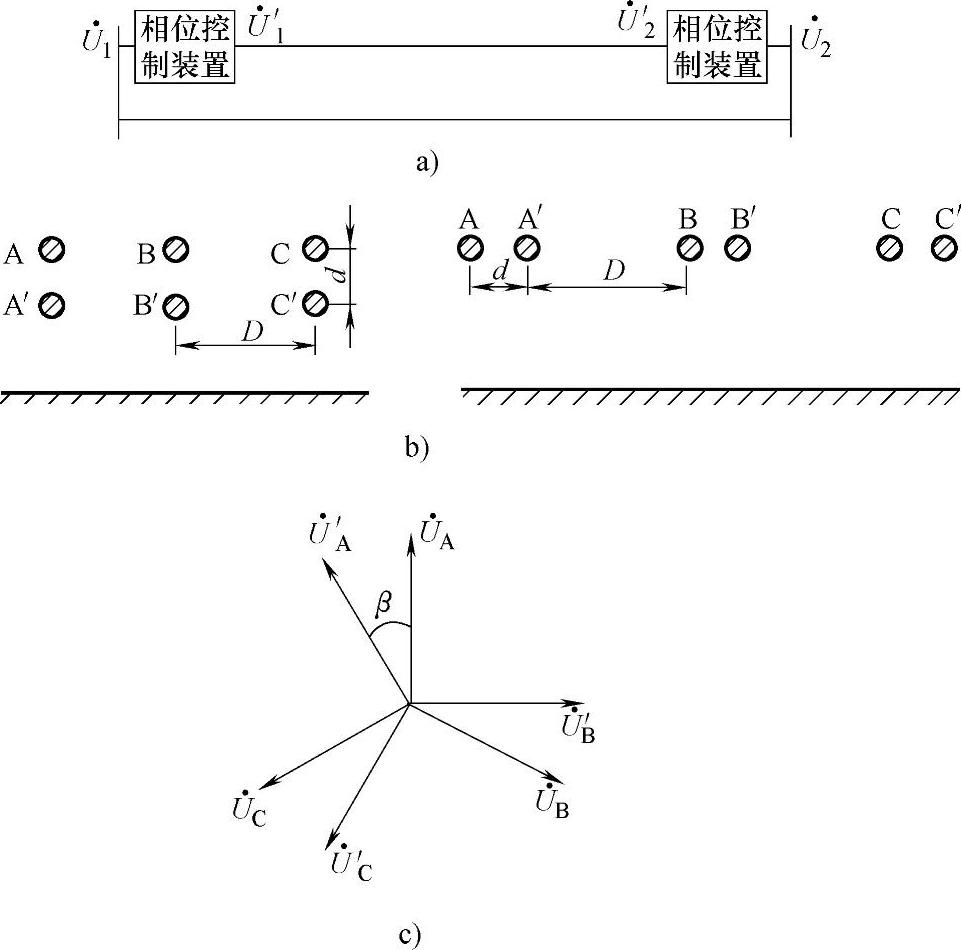
图9.9 可控自补偿架空线路
a)可能的接线方式 b)塔架上导线的分布 c)线路电压相量图
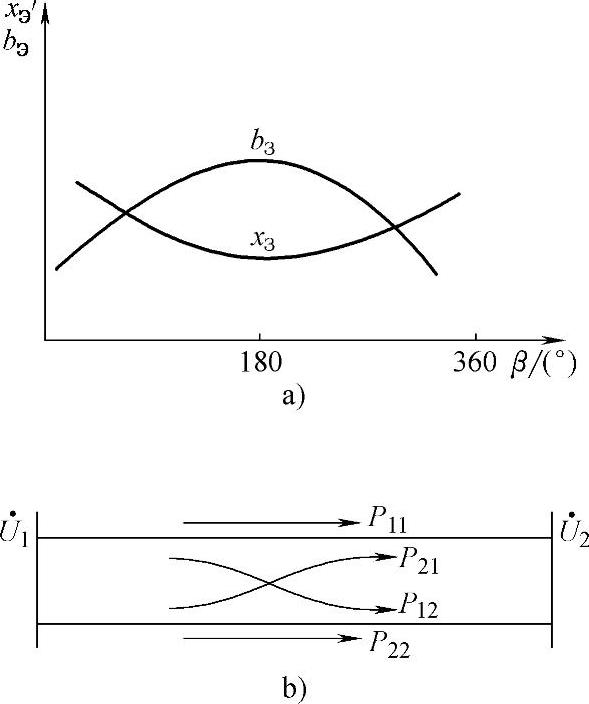
图9.10 可控自补偿架空线路的特性
a)电抗和导纳与电压相量相角差的关系
b)线路回路间的功率交换
每一回路电流相量的相对位置取决于每一回路首端电压相量的相对位置(图9.9b)。因此,如果借助于相位变换装置,在0~180°、或者是更大的范围内改变这些相量(角度b)的相对位置,xм的符号和数值同样改变,相应地xэ值也发生变化(见图9.10a)。当b=180°时,xэ具有最小值,因为此时xм有最大的负值。同时每一导线的等值电纳bэ也发生改变,随着角度b从0~180°的增加而增大。由此,波阻抗和传输功率发生变化。
借助于相位变换装置改变角度b,可以改变线路所传输的有功功率。当b>0时,由于双回导线分布的距离较近,它们之间产生了潮流的相互交换(见图9.10b)。
每一回路有三个分量,对于第一个回路有:
P1=P11+P12+P21 (9.5)
式中 P11——第一回路的自功率;
P12——由第一回路到第二回路的交换功率;
P21——由第二回路向第一回路的交换功率。
对于第二个回路也有类似的方程。
每一个分量是每一回路首端和末端电压(复数值)、等值阻抗х1、х2和它们的互导纳b12、b21的函数:

当线路的长度相对较小时,b12和b21同样较小,因此分量P12和P21也不大。
为了控制这些线路的状态,必须使用相位变换装置,用来控制每一回路的功率。但是,如果一对导线连接到相互相角差120°的不同相电压上,在不可控状态下可以得到期望的效果。这种方式在俄罗斯已经被研究,并且建造了工作在不可控状态的10kV试验线路。在这些线路上理论研究的结果被证实,并且表明,这种方式是建立可控(柔性)线路的可能方式之一。(https://www.xing528.com)
另一种改变线路电磁特性的方式是,应用可控纵向容性补偿,应该具有可控电容器组和可控并联电抗器,此时同样可能存在几种情况。
其中之一是改变电容器组的阻抗,可以通过将电容器组分成几节来实现,其具有不同的阻抗(хк1、хк2等)比,如1∶2∶3∶5,并且可以借助于串联在线路上的晶闸管开关将每节或者是几节的组合投入电网(见图9.11a)。
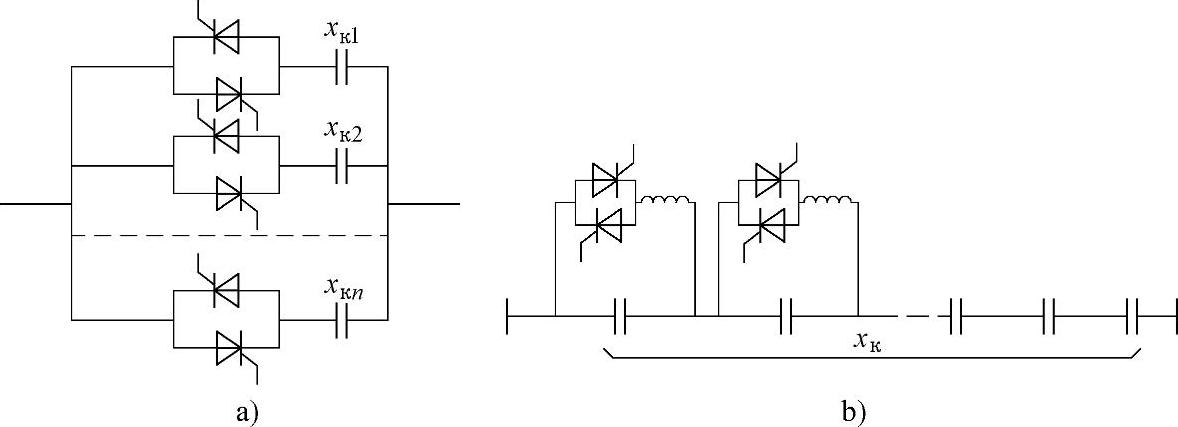
图9.11 借助于晶闸管开关的可控纵向容性补偿电容器组阻抗改变的可能方式
a)各节电容器组的连接 b)电容器组节的并联
在其他情况下,电容器组阻抗的改变可以借助于晶闸管开关,通过电容器组部分节的并联来实现(见图9.11b)。此时部分电容器不处于工作状态;相反,部分电容器处于工作状态,从而电容器组的阻抗被改变。
这些方法的缺点是电容器组阻抗的变化是不连续的。另外,晶闸管开关的功率较大。
如果将电容器组与任何方式的可控电抗器并联,可以消除这种不连续性。此装置的示意图如图9.12a所示。在这种接线方式中,电抗器阻抗由最小的可能值到最大允许值变化,从而导致纵向补偿装置总阻抗增加,在整个控制范围内补偿的还是容性的。到感性补偿状态的过渡,要经过LC回路中的电流谐振。此时,回路各个分支中的电流将急剧增加,并且在理论上如果存在0电阻时将达到无穷大,这是不容许的。
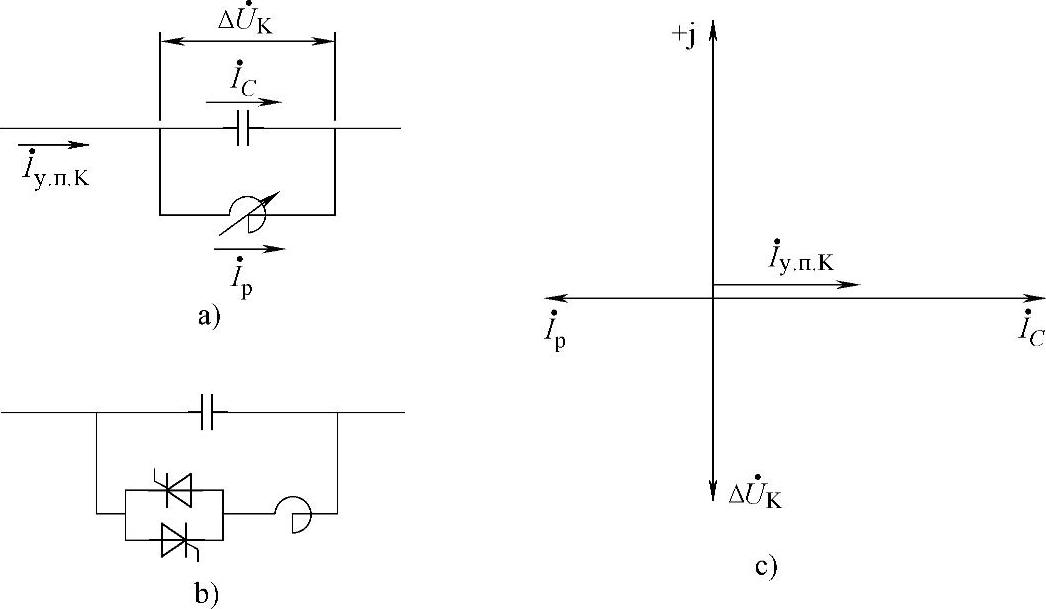
图9.12 借助于并联可控电抗器的可控纵向容性补偿阻抗的变化
a)纵向可控容性补偿装置示意图 b)纵向可控容性补偿装置电压和电流相量图 c)具有可控晶闸管开关电抗器的纵向可控容性补偿装置
当给定线路补偿度的变化范围时,问题就在于如何得到电抗器阻抗所必需的变化范围。在上图中,只有在电抗器的阻抗为0时才可能得到0补偿度,即电容被电抗器的零阻抗分流。但是,实际上这是不可能达到的,因为电抗器可能从某个最小值到最大值范围内改变本身的阻抗,此时电抗器最小阻抗对应其最大功率,而最大阻抗对应最小功率。
由此可以看出,必须给定某初始的、对应电抗器断开时的补偿度kн。当电抗器投入以及其以后的控制时,补偿度将增加到期望值。按照这个补偿度的初始值可以确定电容器组的阻抗:

下面分析纵向可控容性补偿装置回路(见图9.12a),为此可以得到下列关系:

当xр>хС时,等值阻抗xS是容性的,此时在控制的初始阶段(在最小补偿度下)xр应当是最大可能值。当xр减小时,等值阻抗x∑将增加,相应地线路补偿度也增加。
计算表明,电抗器的阻抗取决于初始补偿度和线路长度,应当是相对较小的(不到100Ω),并且在控制过程中大概减小2倍,此时电抗器的阻抗变化很平稳。在一些情况下是以每欧姆逐次变化的,这会对其控制系统提出严格的要求。
因为上述回路工作在近似谐振的条件下,电抗器和电容器组的电流将远远超过线路的相电流(图9.12b)。当补偿度等于0.5~0.6时,超过相电流的幅度可能达到6~7倍,将不可避免地导致这些元器件安装功率的增加。电流和电压相量图如图9.12b所示。
在上述可控纵向补偿装置示意图中,晶闸管控制电抗器和磁化控制的电抗器都可以作为可控电抗器来使用。在世界范围内,已知的装设纵向补偿装置的输电线路,使用的都是晶闸管控制的电抗器(图9.12c)。在控制过程中产生的高次谐波电流,此时经过电容器形成回路,实际上并不流向线路。
可以看出,在上述所有的纵向补偿装置阻抗控制方法中,同时伴随着电容器组输出端电压的变化。由此得出,如果被控电压串联于线路上,成比例地补偿,以及与相电流相差90°,那么就会得到与纵向补偿装置投入一致的效果。借助于变压器引入上述电压,无功功率源连接于其一次绕组上,就是同步调相机(图9.13a)或者静止调相机(图9.13b)。
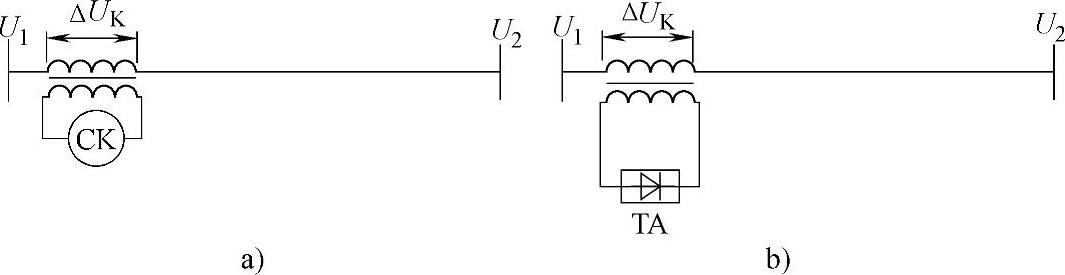
图9.13 潮流控制器串联示意图
a)同步调相机 b)静止调相机
静止调相机的使用应该是最有前景的,因为与同步调相机相比较,此装置没有机械部分,并且具有动作的快速性。现有的变压器可以适应静止调相机,其与纵向补偿装置的区别不在于相电动势上,而是在静止调相机具有很大的低电动势上,这可以大大简化其结构和维护。在文献中,这样的装置被称为串联潮流控制器(ПРПМ)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。