



1.并行通信与串行通信
并行数据通信是以字节或字为单位的数据传输方式,需要多根数据线和控制线,在工业控制通信中很少使用。
串行数据通信是以二进制的位(bit)为单位的数据传输方式,每次只传送一位。串行通信最少只需要两根线就可以连接多台设备,组成控制网络,可用于距离较远的场合。工业控制设备与计算机之间的通信几乎都采用串行通信方式。
2.异步通信
在串行通信中,接收方和发送方应使用相同的传输速率,但是实际的发送速率与接收速率之间总是有一些微小的差别,如果不采取措施,在连续传送大量的信息时,将会因为积累误差造成错位,使接收方收到错误的信息。为了解决这一问题,需要使发送过程和接收过程同步。按同步方式的不同,串行通信分为异步通信和同步通信。
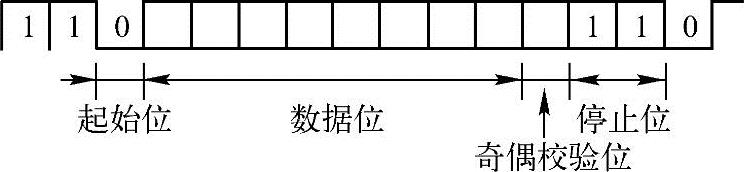
图6-41 异步通信的字符信息格式
异步通信采用字符同步方式,其字符信息格式如图6-41所示,发送的字符由一个起始位、7个或8个数据位、1个奇偶校验位(可以没有)、1个或2个停止位组成。通信双方需要对采用的信息格式和数据的传输速率作相同的约定。接收方检测到停止位和起始位之间的下降沿后,将它作为接收的起始点,在每一位的中点接收信息。由于一个字符信息格式仅有十来位,即使发送方和接收方的收发频率略有不同,也不会因为两台设备之间的时钟周期差异产生的积累误差而导致信息的发送和接收错位。异步通信传送的附加的非有效信息较多,传输效率较低。但是随着通信速率的提高,可以满足控制系统对通信的要求,PLC一般采用异步通信。
奇偶校验用来检测接收到的数据是否出错。如果指定的是偶校验,发送方发送的每一个字符的数据位和奇偶校验位中“1”的个数为偶数。如果数据位包含偶数个“1”,奇偶校验位将为0;如果数据位包含奇数个“1”,奇偶校验位将为1。
接收方对接收到的每一个字符的奇偶性进行校验,可以检验出传送过程中的错误。有的系统组态时允许设置为不进行奇偶校验,传输时没有校验位。
在串行通信中,传输速率(又称波特率)的单位为波特,即每秒传送的二进制位数,其符号为bit/s或bps。
3.单工与双工通信方式
单工通信方式只能沿单一方向传输数据,双工通信方式的信息可以沿两个方向传送,每一个站既可以发送数据,也可以接收数据。双工方式又分为全双工方式和半双工方式。
全双工方式数据的发送和接收分别用两组不同的数据线传送,通信的双方都能在同一时刻接收和发送信息(见图6-42)。半双工方式用同一组线接收和发送数据,通信的双方在同一时刻只能发送数据或只能接收数据(见图6-43)。通信方向的切换过程需要一定的延迟时间。
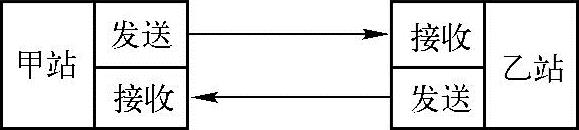
图6-42 全双工方式

图6-43 半双工方式
4.串行通信的接口标准
(1)RS-232C(https://www.xing528.com)
RS-232C是美国电子工业联合会1969年公布的通信标准,现在已基本上被USB取代。
RS-232C采用负逻辑,用-15~-5V表示逻辑“1”状态,用+5~+15V表示逻辑“0”状态,最大通信距离为15m,最高传输速率为20kbit/s,只能进行一对一的通信。通信距离较近时,只需要发送线、接收线和信号地线(见图6-44),便可以实现全双工通信。
RS-232C使用单端驱动、单端接收电路(见图6-45),是一种共地的传输方式,容易受到公共地线上的电位差和外部引入的干扰信号的影响。
(2)RS-422A
RS-422A采用平衡驱动、差分接收电路(见图6-46),利用两根导线之间的电位差传输信号。这两根导线称为A线和B线。当B线的电压比A线高时,一般认为传输的是数字“1”;反之认为传输的是数字“0”。能够有效工作的差动电压从零点几伏到接近十伏。
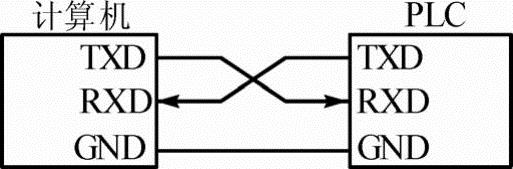
图6-44 RS-232的信号线连接
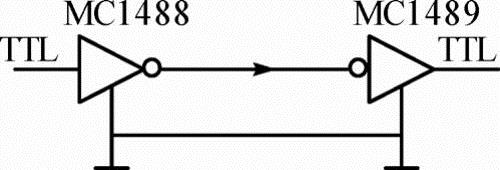
图6-45 单端驱动单端接收
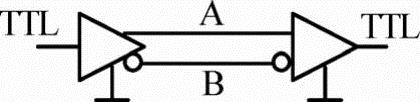
图6-46 平衡驱动差分接收
平衡驱动器有一个输入信号,两个输出信号互为反相信号,图中的小圆圈表示反相。两根导线相对于通信对象信号地的电位差称为共模电压,外部输入的干扰信号主要以共模方式出现。两根传输线上的共模干扰信号相同,因为接收器是差分输入,两根线上的共模干扰信号可以互相抵消。只要接收器有足够的抗共模干扰能力,就能从干扰信号中识别出驱动器输出的有用信号,从而克服外部干扰的影响。
与RS-232C相比,RS-422A的通信速率和传输距离有了很大的提高。在最大传输速率10Mbit/s时,允许的最大通信距离为12m。传输速率为100kbit/s时,最大通信距离为1200m,一台驱动器可以连接10台接收器。RS-422A是全双工,用4根导线传送数据(见图6-47),两对平衡差分信号线分别用于发送和接收。
(3)RS-485
RS-485是RS-422A的变形,RS-485为半双工,对外只有一对平衡差分信号线,不能同时发送和接收信号。使用RS-485通信接口和双绞线可以组成串行通信网络(见图6-48),构成分布式系统,总线上最多可以有32个站。
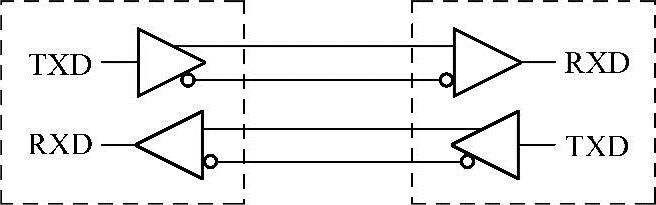
图6-47 RS-422通信接线图
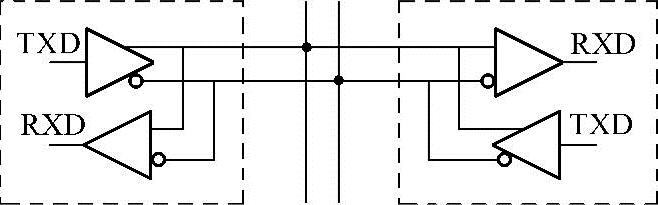
图6-48 RS-485网络
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。