



有两种类型的激光速度计,它们分别是激光多普勒速度计和激光多普勒风力计。激光多普勒速度计测量辐射发出与辐射返回之间的频移,如图1.30所示。这种方法对于协同目标的测量是最好的,但这不是严格必要条件。
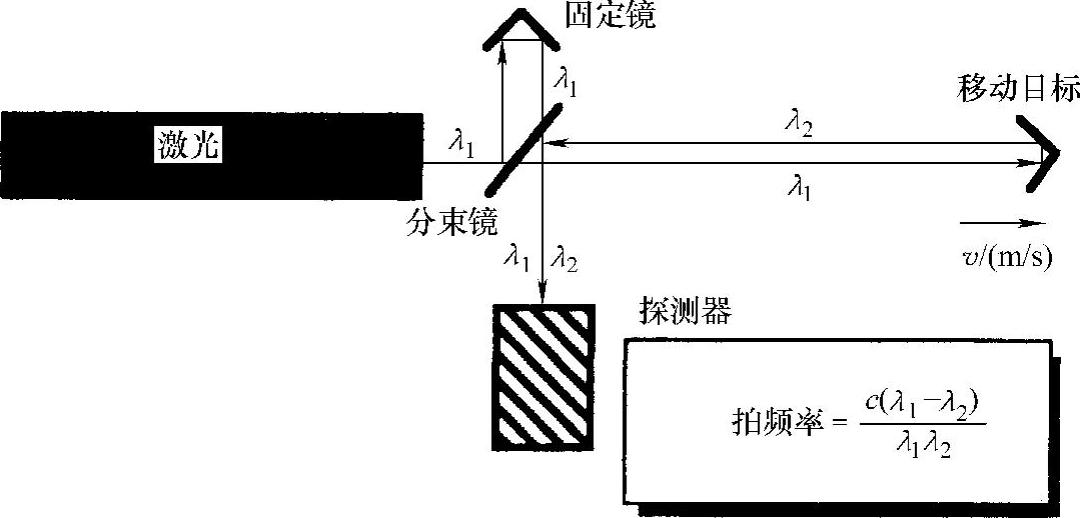
图1.30 激光多普勒速度计
向外辐射的光波长为λ1,但当它被以速度v移动的反射镜反射回来时,波长的增长或缩短由速度v{λ1/c}决定。例如反射镜面的速度为v,光波传输的速度为c,距离为λ1,因此多普勒移动波长为
λ2=λ1[1+v/c]
当两个波在探测器上会合时,如果是两个波的波峰相遇,这表明两个波的相位相同,就会相互增强。
[λ1/(λ1-λ2)]λ2
这是拍波长,因此拍频率为
[c(λ1-λ2)]/(λ1λ2)
现在
λ2=λ1[1+v/c]
因此拍频率为
fbeat=[c(λ1v/c)]/(λ1λ2)=v/λ2
光脉冲飞行的时间也记录了飞行距离,该技术可以比较容易地应用到军事领域。这些仪器可以测量高速落锤和其他设备的移动速度,或者结合时间和速度可以测量移动物体的长度。不同的是它具有一个三角形的激光器,如图1.31所示,由于三角形是旋转的,因此一个方向的光路旋转与其他方向的光路旋转相比,光路长度是不同的。在探测镜上可以探测到一个拍频率,因此这个装置是一个陀螺仪,它不能被倾倒。当前它被安装在许多飞机和导弹上。(https://www.xing528.com)
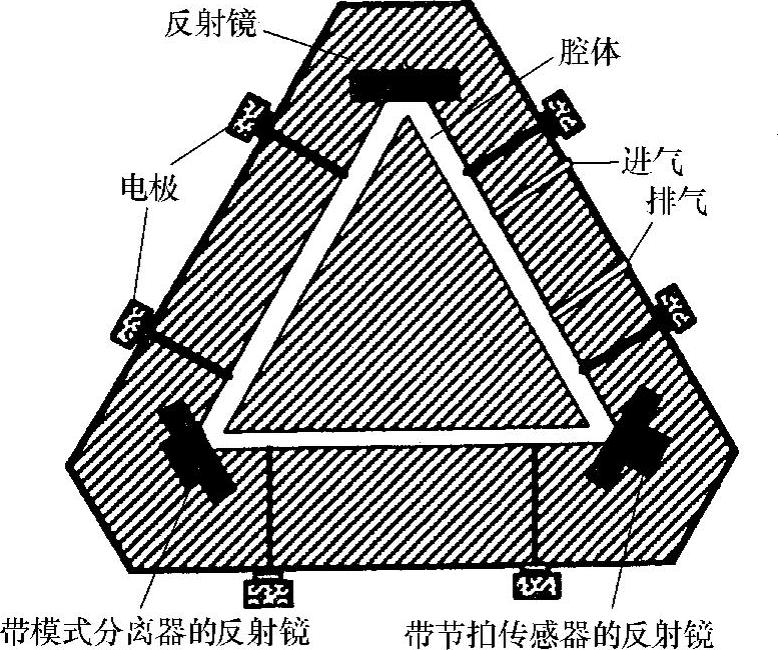
图1.31 激光陀螺仪
采用光纤陀螺仪(FCG)代替三角形的激光陀螺仪可以获得更长的光程长度,因此可以得到更精确的测量结果。光纤陀螺仪具有尺寸小、结构坚固、重量轻和免维护的优点。它的基本结构如图1.32所示,它是基于Sagnac相干仪的原理进行运作[19]。
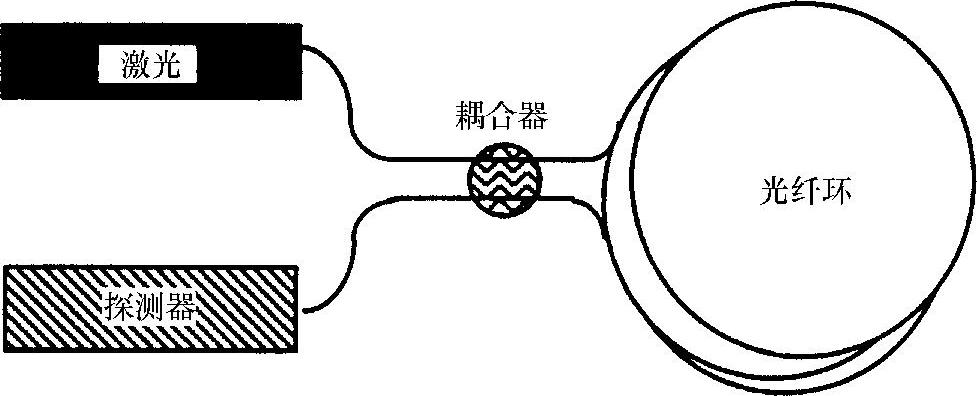
图1.32 光纤陀螺仪
ΔL为光程长度增量,由N圈光纤旋转造成的光程长度增量为
ΔL=光程长度×(速度增量/光速)=(2πr){(2rω)/c}N这将可以得到一个ΔL[2π/λ]的相移,小到10-7rad的相移都可以被测量到。为了确保两个相反的旋转光束跟随完全相同的路径,这些光纤必须实现单模偏振。
光纤陀螺仪的应用数量正在快速增长。自从1987年开始,在东京周围,大约500000辆的尼桑(Nissan)和丰田(Toyota)车安装了汽车导航系统,这个系统使用了CD ROM地图、计算机信息显示和基于激光陀螺仪的推算定位导航系统,尽管这个系统正在被基于卫星的全球定位系统(GPS)所取代,它可以作为商业飞行器中的陀螺地平仪。一个典型的激光陀螺仪系统具有四个线圈,每个旋转轴用一个,多余的一个作为交叉检验[20]。
重型加速运动设备使用激光陀螺仪是非常理想的,诸如导弹、自控机车、遥控的农业喷洒和在危险区域内的车辆。在地下区域内使用陀螺仪也非常理想,在这些区域内卫星不起作用,并且磁性振动会对罗盘产生干涉作用。
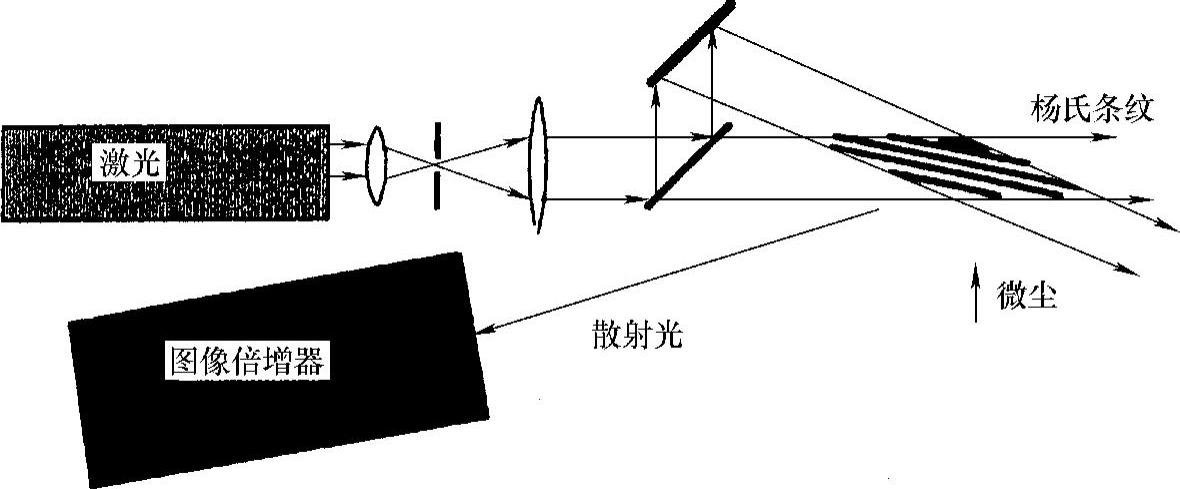
图1.33 激光多普勒风速计原理图
激光多普勒风速计的原理(LDA)如图1.33所示,这个设备是研究流体流动现象的标准设备。在流动气流中,分离的光束在流动气流中的点上再相遇,这个点就可被分析。在这个点,相干光束将形成杨氏条纹,如图1.33所示,在那里两束光的相位是相同的或者是相反的。如果微粒透过条纹,它们将反射光束(为了获得较好的信号,这个系统需要一些烟或者尘土),这个信号通过光电倍增器进行探测。信号中的频率可以通过快速傅里叶变换(FFT)进行分析,还分析出条纹表面的颗粒速度,分析包括速度变更和紊流。整个分析不会对流体流动产生任何干扰,并且可以进行远程测量。例如可以测量正在运行的柴油发动机内的流体流动。由于这种方法只能测量一个方向的速度矢量,为了同时测量二维的速度矢量,需要使用一个双色系统。通过分析返回信号的精确频率,多普勒频移将表征沿光轴方向的速度,因此这个仪器能够同时测量三维速度矢量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。