



测量长度可以用以下的方式:干涉测量法,飞行时间测量法,滞留时间测量法以及三角测量法。
1.4.3.1 干涉测量法
利用激光的相干性原理,可以把连续波激光,作为干涉仪中的标尺,在干涉中两个相干光的路径长度是完全不同的。干涉仪的基本结构如图1.25所示,采用这种方法可以使加工台的位置精度达到0.1μm,并且具有非常高的重复精度[12],其基本布置如图1.26所示。测量的距离接近于相干长度时就可以采用这种方法,这个方法测量的距离常常在100m左右。
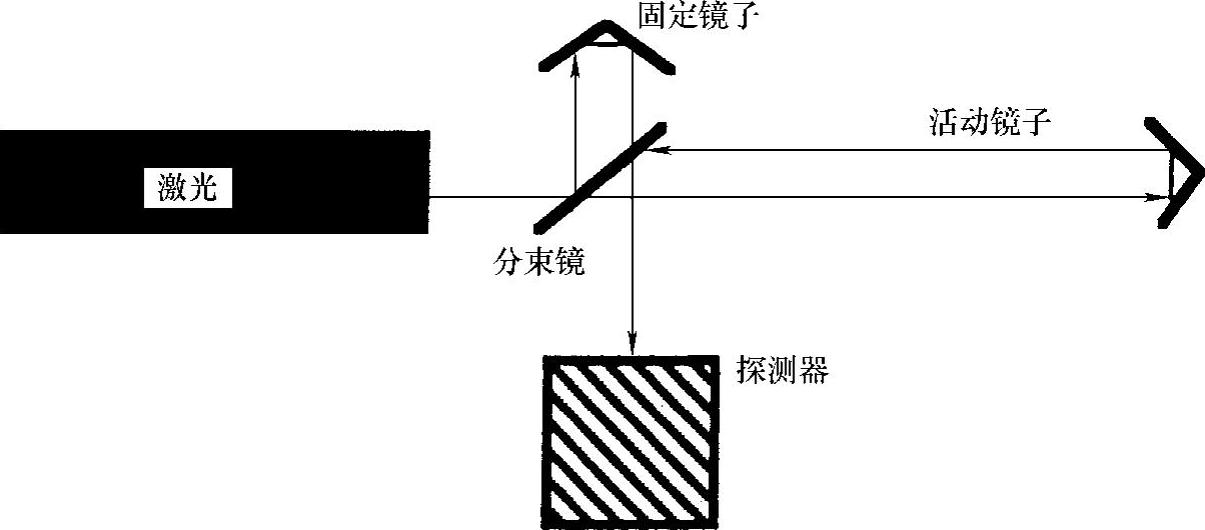
图1.25 迈克尔逊型干涉仪
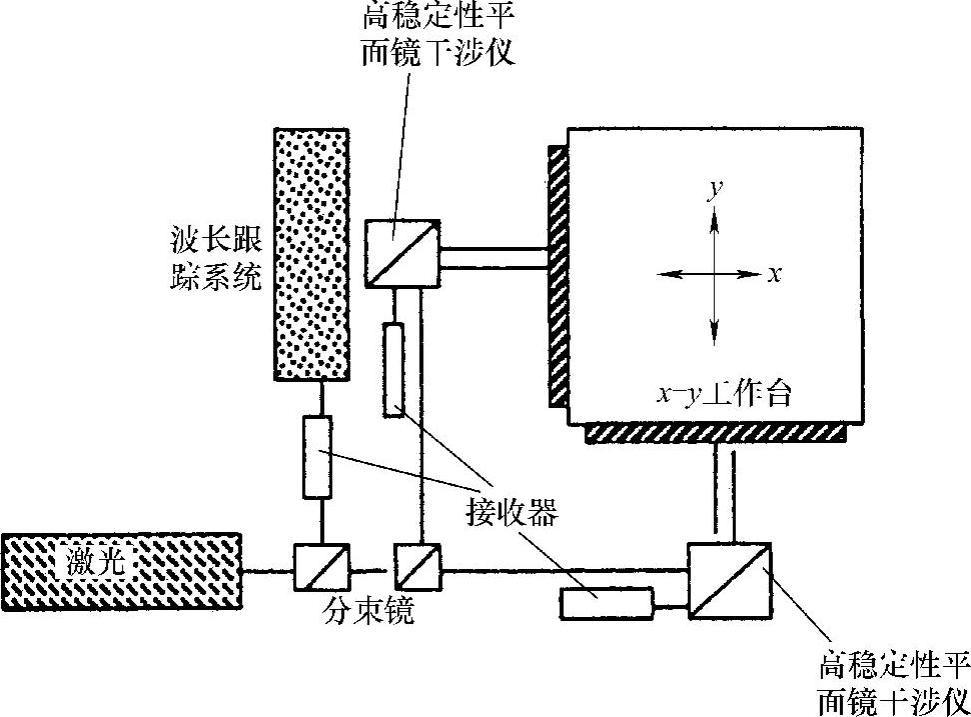
图1.26 激光校准x/y工作台
1.4.3.2 飞行时间测量法
可以利用短脉冲的飞行时间测定距离。月球的振动及探测器的工作范围都是采用这种方法进行测量的,如果使用激光,任何上千米距离只能采用这种方法进行测量。测量精度接近±2cm,具体情况取决于脉冲的长度。目前有一个72μW手提式激光测距设备,2003年的价格大约是10000 ,它可以检测容器的长度,也可以检测假墙等缺陷[13]。现在已经发展了激光雷达[14],荧光CO2雷达可以获得800km以外目标的多普勒图像[15]。采用相干激光雷达可以减少雷达屏幕上的杂散波,并可以测量硬目标的距离、速度及方向。通过对风速的采集,激光雷达可以对气相及气氛中的颗粒状物质进行监测。该技术也被用于对侧风的测量,从而能使降落伞精确着陆。激光脉冲既可以作为测距仪,也可以对弹道进行计算机计算。未来激光测距装置可能有更多的应用领域,它可以作为汽车碰撞警告装置,对汽车速度进行自动控制,甚至可以作为汽车的导航装置,实际上它可以作为任何运动物体的防碰装置[16]。(https://www.xing528.com)
,它可以检测容器的长度,也可以检测假墙等缺陷[13]。现在已经发展了激光雷达[14],荧光CO2雷达可以获得800km以外目标的多普勒图像[15]。采用相干激光雷达可以减少雷达屏幕上的杂散波,并可以测量硬目标的距离、速度及方向。通过对风速的采集,激光雷达可以对气相及气氛中的颗粒状物质进行监测。该技术也被用于对侧风的测量,从而能使降落伞精确着陆。激光脉冲既可以作为测距仪,也可以对弹道进行计算机计算。未来激光测距装置可能有更多的应用领域,它可以作为汽车碰撞警告装置,对汽车速度进行自动控制,甚至可以作为汽车的导航装置,实际上它可以作为任何运动物体的防碰装置[16]。(https://www.xing528.com)
1.4.3.3 滞留时间测量法
如图1.27所示,当线被制成,并且以每秒几千米的速度移动时,通过测量扫描光束的滞留时间,可以对线的宽度进行测量。采用这项技术可以测量微米级的静态物体。
光束以v=2ωf的速度对物体进行扫描,ω为角速度,反射光旋转的速度是光镜旋转速度的2倍,f为焦距(见图1.27),由滞留时间Δt可以确定物件的尺寸,Δy=vΔt=2ωfΔt,该系统的测量精度取决于物体表面光斑的大小。
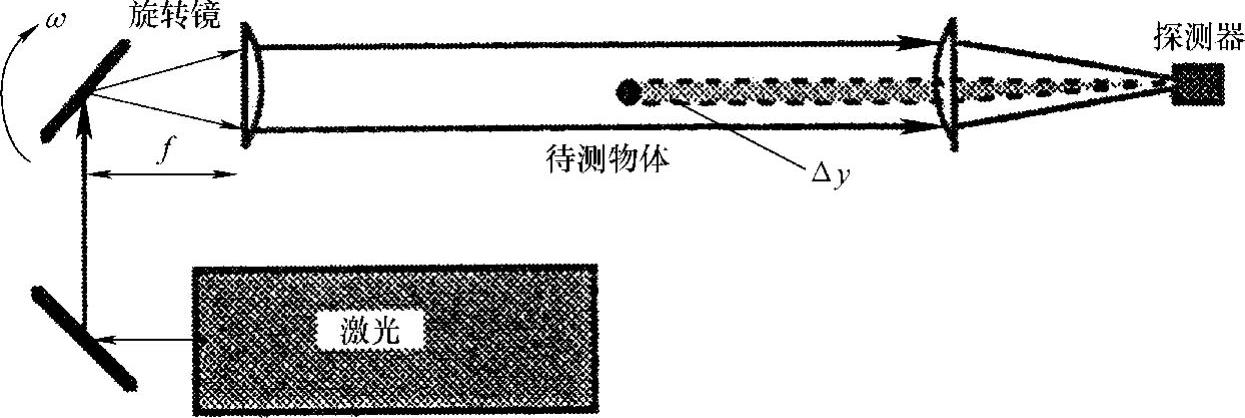
图1.27 通过激光的滞留时间测量物体厚度的一种方法
1.4.3.4 三角测量法
该技术的基本原理如图1.28所示。一束由He/Ne激光或红色半导体激光发出的光束对准待测物体,在物体表面产生一个亮点。测量设备内部集成的高分辨率CCD相机对亮点进行观察,并将其影像显示在光敏二极管阵列上。当距离发生变化时,阵列上的影像会从一个二极管变化到下一个二极管上,这个正在亮着的二极管表征了距离的长短。通常这个方法的测量范围为300~10000mm,测量精度为0.05%,读数时间接近50ms。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。