



1.上限法的基本概念与公式
上限法是由虚拟速度场和虚拟速度间断面入手,求解变形功率和变形力。该虚拟速度场满足速度边界条件和体积不变条件,称为动可容速度场(位移场)。上限法求得的近似功率和近似载荷均高于真实值,实质是一种高估法。但为了不过高于真实值,可对速度场进行优化,求出其极小值。
上限定理是上限法的理论基础。如图1-4-27所示,设变形体体积为V。表面分为两部分,即力面SF和速度面(位移面)Su。力面,即预先给定表面力的面;速度面,即预先给定位移速度的面。变形体内有速度间断面Γ。上限定理可表述如下:
在速度面Su上,与任意动可容速度场u̇ki对应的表面力Tki所做的功率,总是大于或等于真实表面力Ti在真实速度场ui下所做的功率:

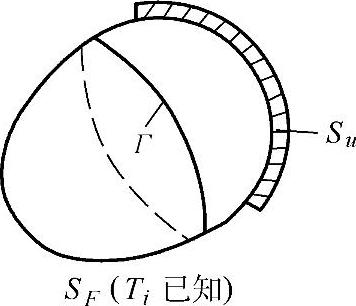
图1-4-27 边界条件与速度间断面示意图

式(1-4-42)右端第一项为虚拟的连续速度场所做功率,第二项为虚拟的速度间断面上消耗的剪切功率,第三项为在力面SF上,真实表面力和虚拟速度场所做功率,三项之和为所求近似变形功率。式(1-4-42)左端为真实功率。
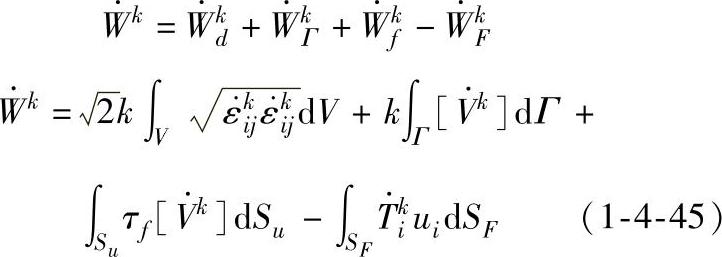
考虑工具和变形体之间的摩擦力后,虚功率的计算式为:
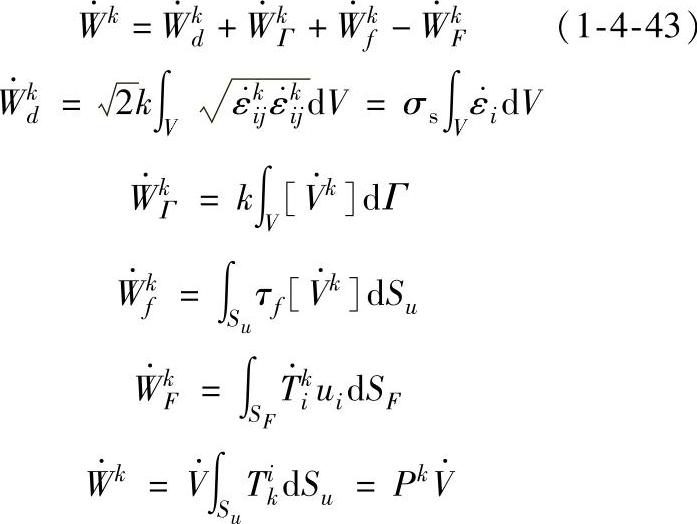
式中  ——连续速度区消耗的功率;
——连续速度区消耗的功率;
 ——速度间断面上的剪切消耗功率;
——速度间断面上的剪切消耗功率;
 ——变形体与工具间摩擦消耗功率;
——变形体与工具间摩擦消耗功率;
 ——力面上表面力消耗功率;
——力面上表面力消耗功率;
 ——虚功率。
——虚功率。
解题时,一般有下述两种情况。
(1)将变形体虚拟为由刚性块组成(工藤上限法)若将变形体视为由若干刚性块组成的,则各块内部并不消耗功率,即 ,仅有各块间及刚性块与工具间的切应力消耗功率。此时:
,仅有各块间及刚性块与工具间的切应力消耗功率。此时:
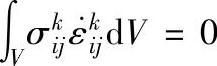
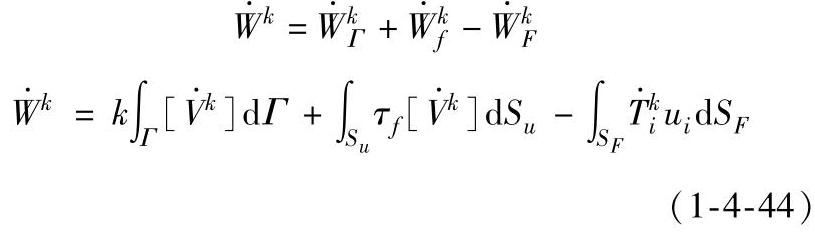
式1-4-43简化为:
(2)塑变区虚拟为连续速度区与刚性区组成(Avitzur上限法):
 (https://www.xing528.com)
(https://www.xing528.com)
2.上限模式及应用实例
(1)上限模式 上限法求解的关键在于设计速度场。设计速度场的不同类型通常称为上限模式,常用的有以下几种。
1)简化滑移线场上限模式(刚性块)。这种模式实际就是将连续的滑移线场简化为若干个刚性块,以此作为流动模式,求出间断面大小与速度间断值,用式(1-4-44)计算总变形功率,进而求出平均单位压力。
2)基元技术。在平面应变时把塑性区划分为若干个刚性块,称为“基元矩形技术”,每一矩形单位又由若干三角形组成。根据几何形状及摩擦状态确定矩形单元的流动模式,经优化后,求出单元的功率消耗系数ei,从而求出整个变形体的总功率及工具的平均单位压力。对于轴对称问题,把子午面的塑性区看作由若干个矩形截面组成,每个矩形截面表示一个不同形状的圆环或圆柱单元,而矩形截面又由刚性块和连续速度区组成。这称为“基元圆环技术”。经过与基元矩形技术同样的步骤,可以求出总功率及平均单位压力。
3)连续速度场。这种模式是将变形体内的塑性区设计为连续的速度场,只有在刚塑性边界上产生速度间断。连续速度场的类型有:平行速度场、向心速度场及三角场等。设计上限模式,要依据变形体的几何形状摩擦状态,下面通过实例说明刚性块模式求解过程。
(2)断面收缩率为0.5的平面应变正挤压
图1-4-28是一种在铝合金型材制造中较为多见的典型的平面正挤压。图中上限模式是由4个相同的三角形组成的。三角形的数目越多,挤压力的上限估计值越接近精确值。对应的速度图为图1-4-28b。
根据图1-4-28a的模式确定速度间断线的长度,根据图1-4-28b确定速度间断值,可得出虚拟功率方程为:
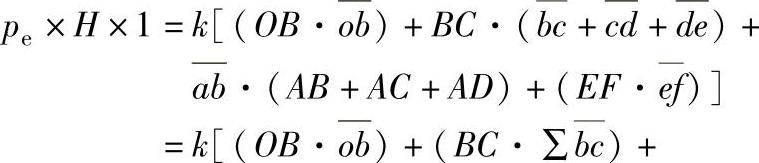
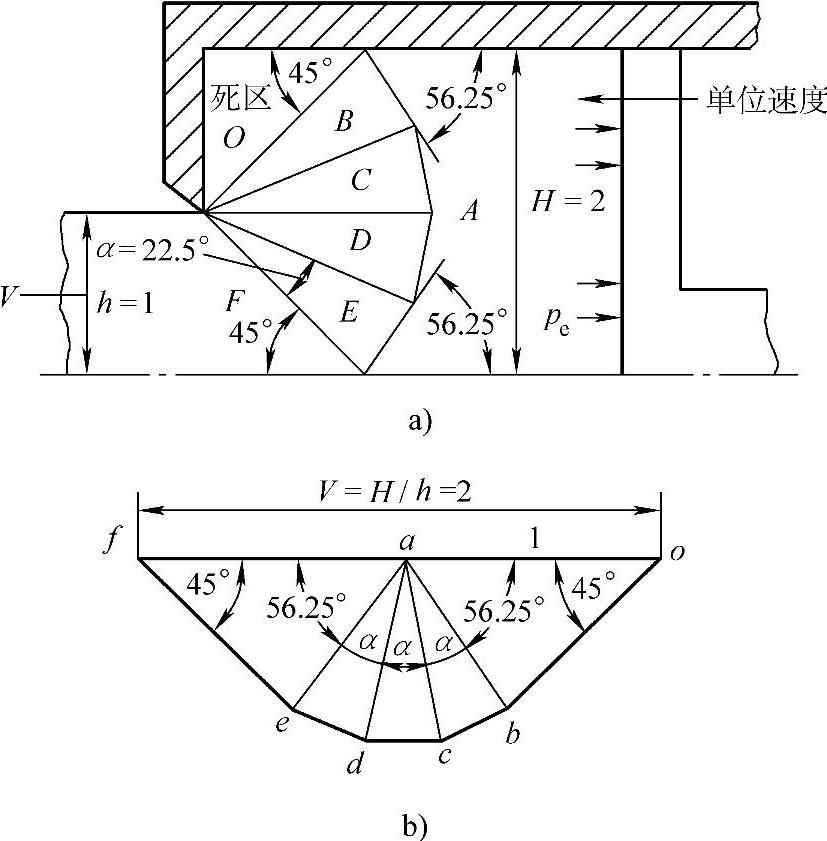
图1-4-28 断面收缩率为0.5的平面正挤压
a)刚性块上限模式 b)速度图

式中 pe——凸模单位挤压力。
式中大写与小写字母分别代表速度间断线长度与速度间断值。
将相应的数值代入上式,可得到量纲为一的挤压力:
pe/2k≈1.3
取极限状态,当刚性三角块的数目趋于无限多时,则边界形成一圆弧。于是,上限模式就成为如图1-4-28a所示的90°扇形刚性块,对应的速度图见图1-4-28b。
采用这样的模式得到的量纲为一的单位压力为:
pe/2k≈1.29
这一结果和该问题的滑移线解是一致的。在参考文献[14]中Avitzur给出了楔形模平面挤压等问题的求解实例,此处不再赘述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。