



在原材料价格普遍上涨,产品竞争异常激烈的今天,φ5系列空调换热器翅片作为新兴产品已逐步取代φ7系列空调换热器翅片,成为家用空调室内挂机的主要部件。φ5系列空调换热器翅片与φ7系列空调换热器翅片相比有如下优点:①所使用的铜管直径变小,具有大的原材料成本压缩空间。②加大了翅片表面的换热面积,提高了翅片的换热效率。由于家用空调市场竞争日益激烈,空调生产厂家对空调换热器翅片生产线提出了更高的要求:大批量生产、高速度冲压、片形复杂、板料变薄。该实例中采用φ5×72R×2P(10.9×21)大型高速精密级进模。
1.制品尺寸及对模具性能要求
(1)产品片形复杂 为了提高翅片的热交换率、缩小空调室内挂机的体积,在翅片上同时成形了百叶窗、端切、中切;成形工序多、复杂,要求同时完成12个工位的成形。图3-48所示为其制品尺寸图。
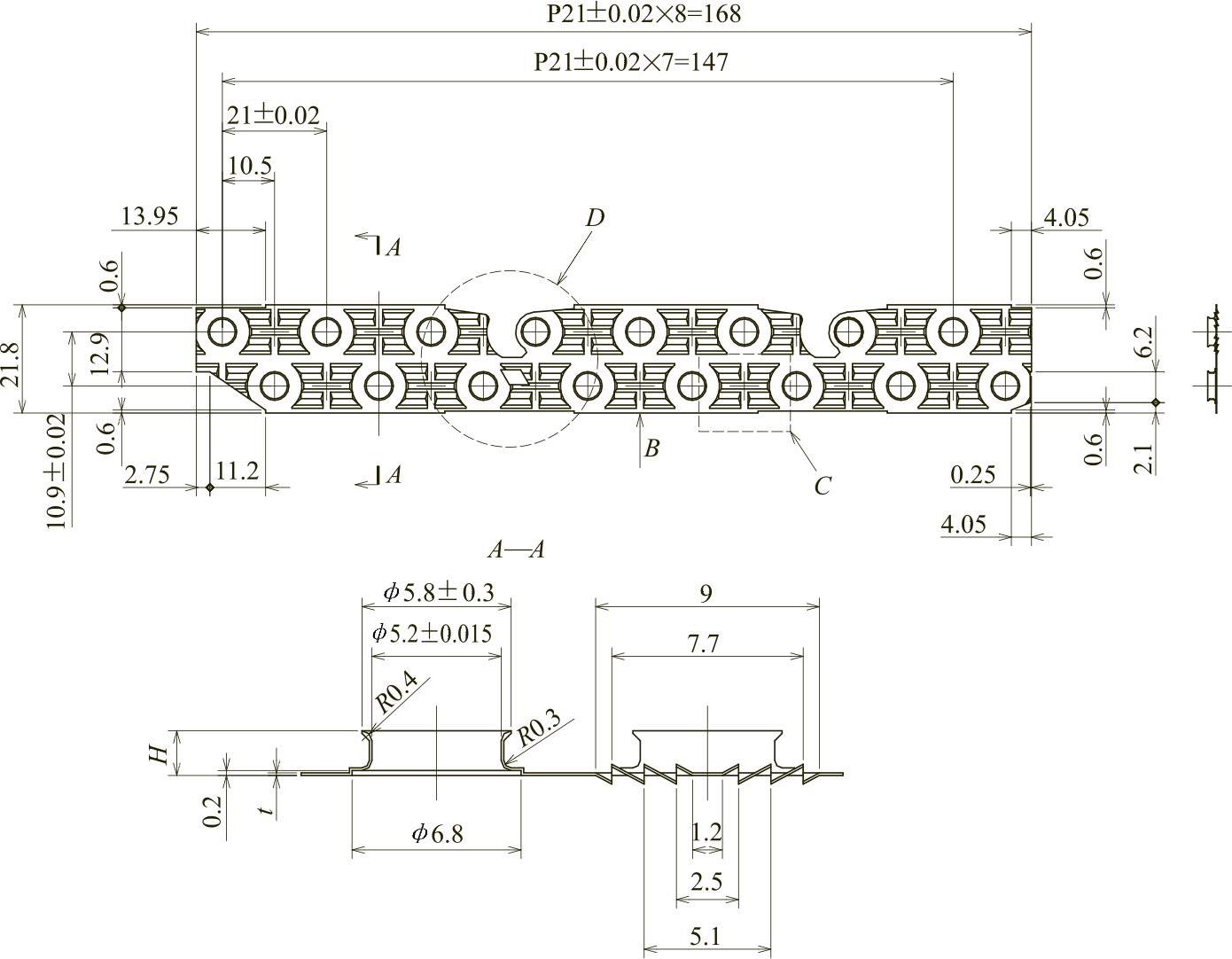
图3-48 翅片制品尺寸图
(2)精度要求高 使用薄铝料、铝料厚度为0.105mm,要求单边冲裁间隙在0.01mm以内;模具的定位偏差控制在±0.005mm以内。
(3)产品要求高 要求产品表面光洁、平整、无刮伤、无毛刺、卷边不开裂。
(4)冲压次数高 为满足年产量100万套以上的要求,模具设计要达到72列两步进,压力机滑块行程次数要达到240次/min以上。
(5)模具主要零件可互换。
(6)模具寿命长 要求模具切口件达到3亿冲次以上;模具本体使用寿命达到15年。
2.翅片冲压模具设计的要点
(1)排样图的确定 根据产品图及冲压成形理论,确定合理的排样,使各冲压工序分布合理。通过对各冲压工序的变形特征进行分析和计算,保证制品顺利冲压生产,满足制品的精度及材料利用率最大化要求。
(2)确定合理的送料方案 送料误差是影响制品质量和导致模具损坏的主要原因。级进模的工序较多,采用分步冲压方式,必须保证送料位置正确。如何确定送料方式和消除送料误差是一个重要问题。
(3)确定模具精度 一要保证凸凹模的互换性精度;二要保证模具各工序间的位置精度;三要保证模具的送料位置精度;四要保证上、下模架运动时的运动精度。
3.冲压工艺路线的确定
翅片通常由铝箔通过安装在压力机上的级进模连续经过各成形工序冲压而成。主要有以下几种冲压工艺方案可供选择。
方案1:多次拉深→冲孔→翻边→切边→分条→切断。
方案2:冲孔→两次变薄拉深→翻边→切边→分条→切断。
方案3:一至两步拉深→冲孔→变薄拉深→翻边→切边→分条→切断。
方案4:多次拉深→冲孔→变薄拉深→翻边→切边→分条→切断。
根据翅片圈部位的成形方法,以上方案可分为三种工艺方式:方案1为拉深成形方式,方案2为变薄拉深成形方式,方案3、4为混合成形方式。
本套模具采用了方案1冲压工艺。根据工艺分析,最终确定该套模具的基本工序为:4次拉深→整形拉深→冲孔、翻边→百叶窗成形→翻横边→中部异形切成形→端部异形切成形→切侧边→切断。
4.本模具设计的难点
此套模具列数多(72列),两步进,且同时有百叶窗、端切、中切成形,工序复杂。凸凹模的互换性精度、各工序间的位置精度、模具送料时的送料位置精度和上、下模架运动时的运动精度都要求很高。大型板类零件的位置偏差及整套模具的配合偏差要控制在±0.005mm以内;切口件的形状、位置偏差要控制在±0.002mm以内,须保证切口件可以互换。
排样的设计中,排样图的设计是最关键的一步,设计时要综合考虑以下因素。
1)各道冲压工序在排样设计中的位置。
2)工位的确定和空工位的位置。
3)高速压力机工作台面的大小、落废料孔的位置。
4)送料方式及位置。
5)送料过程的精确定位。
6)模具的具体结构与位置。
综合以上因素,针对具体产品,初步安排翅片的冲压工步如下:
拉深1→拉深2→拉深3→拉深4→拉深5→空位→空位→冲孔翻直边→冲孔导正→空位→空位→空位→百叶窗成形→空位→空位→翻横边→空位→空位→空位→中部异形切成形→空位→空位→空位→端部异形切成形→空位→两侧切边→空位→导正→空位→分条1→分条2→空位→拉料→空位→切断,共计35步。
具体排样图如图3-49所示。
5.压力中心的计算
(1)模具压力中心 在冲压生产过程中,模具上的模座平面受到来自模芯、多个垂直于该平面的、方向向上的集中力的作用。这些方向上的力构成了一个平行力系,通常将该力系的合力作用点称为模具的压力中心。当压力中心偏离滑块中心线时,压力机滑块由于受到偏心力的作用,会加速与导轨之间的磨损,降低滑块的导向精度和压力机运动的平稳性,进而影响模具寿命和冲压件的质量。因此,在设计模具时,不仅要正确估算模具的受力大小,而且要计算出模具的压力中心。
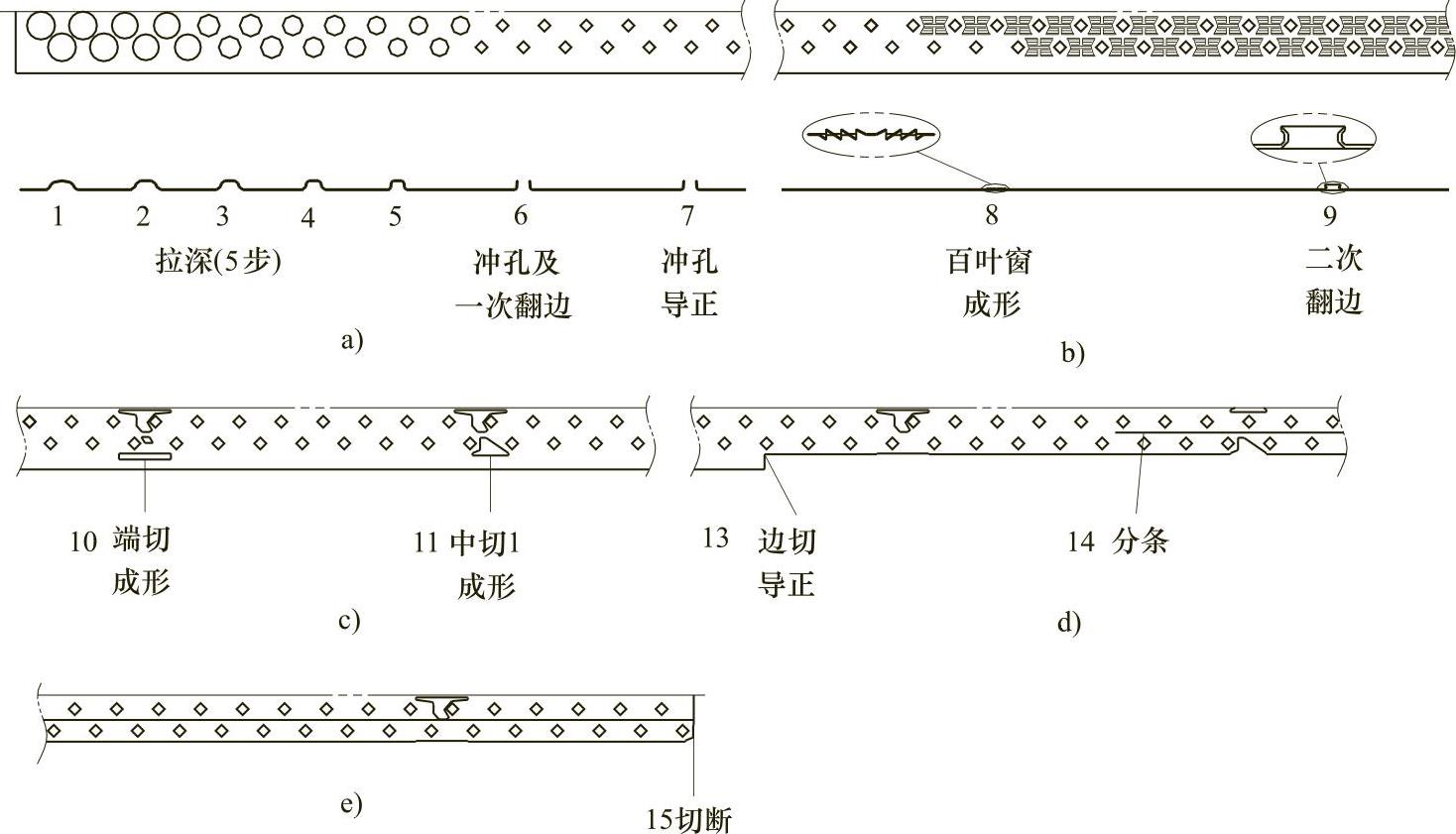
图3-49 翅片件排样图
(2)压力中心的计算方法
1)设上模受到来自模芯的n个向上的集中力P1、P2、…、Pn的作用。
2)所有集中力的合力为R,即

3)选定与集中力垂直的oxy平面。
4)在oxy坐标系中,各集中力的作用点分别为(x1,y1)、(x2,y2)、…、(xn、yn),合力的作用点(即压力中心)为(x,y)。根据空间平行力系的合力矩定理,模具的压力中心为
在本实例中,被加工翅片在宽度方向上,各排孔的情况是相同的,设计模具时将冲压部分在宽度方向上对称分布,则各作用力压力中心即在模具的对称位置上,所以只需计算模具在长度方向上单排孔冲压时压力中心是否在模架中央即可。
(3)单排孔冲压受力的作用位置 根据排样图,可以推出单排孔冲压时主要受力的作用位置(取下模左端面为零点)。
P1=75.4kN x1=229mm
P2=37.2kN x2=271mm
P3=30.7kN x3=313mm
P4=25.5kN x4=355mm
P5=21.3kN x5=397mm
F压边=15.7kN x压边=290mm
F冲孔=35.6kN x冲孔=521mm
F百叶窗=79.2kN x百叶窗=744mm
F翻边=13.6kN x翻边=901mm
F中切=35.9kN x中切=1047mm
F端切=19.6kN x端切=1220mm
F边切=1.4kN x边切=1337mm
F分条1=17.5kN x分条1=1515.5mm
F分条2=17kN x分条2=1578.5mm
F切断=9kN x切断=1951mm
根据计算,总合力为434.6kN,模具的压力中心为x=630mm。
6.模具所配高速压力机的确定
此套模具的总合力为434.6kN,根据高速压力机的选配原则P压力机=(2~3)R,所需压力机公称力应在900kN左右,最终选定的压力机为扬州锻压机床股份有限公司生产的YKC-36A-100,其主要技术参数为:
公称力: 1000kN。
滑块行程: 40mm。
滑块行程次数: 150~250次/min。
装模高度: 270~330mm。
滑块提升量(最小装模高度): 100mm。
工作台板尺寸: 1800mm×1200mm。
滑块底面尺寸: 1300mm×1170mm。
7.模具的整体结构设计
本套多工位级进模与扬州锻压机床股份有限公司生产的YKC-36A-100压力机配套,压力机的装模高度为270~330mm,翅片模具的合模高度设计为270mm,子模的空间高度128mm。模具设计时,需要注意以下几个方面:确定模具的安装结构;选择恰当的定位形式;选择合理的导向方式。
为了降低模架制造难度,便于模具的安装、调整和维护,按照各工位的功能,整套模具采用分块式设计,共分为13个分模块。压料装置为第1模块,5步拉深为第2模块,冲孔翻边模为第3模块,百叶窗模为第4模块,二次翻边(即翻横边)模为第5模块,中切模为第6模块,端切模为第7模块,边切(及两侧切边)为第8模块,导正模为第9模块,分条1模为第10模块,分条2模为第11模块,送料模为第12模块,切断模为第13模块。前11个模块由压力机滑块统一提供动力,滑块上下运行一次,模具开合一次。切断模只有在零件长度达到要求时才进行动作,其动力由压力机PLC控制系统,根据冲孔次数控制电动机提供。模具整体结构示意图如图3-50所示。
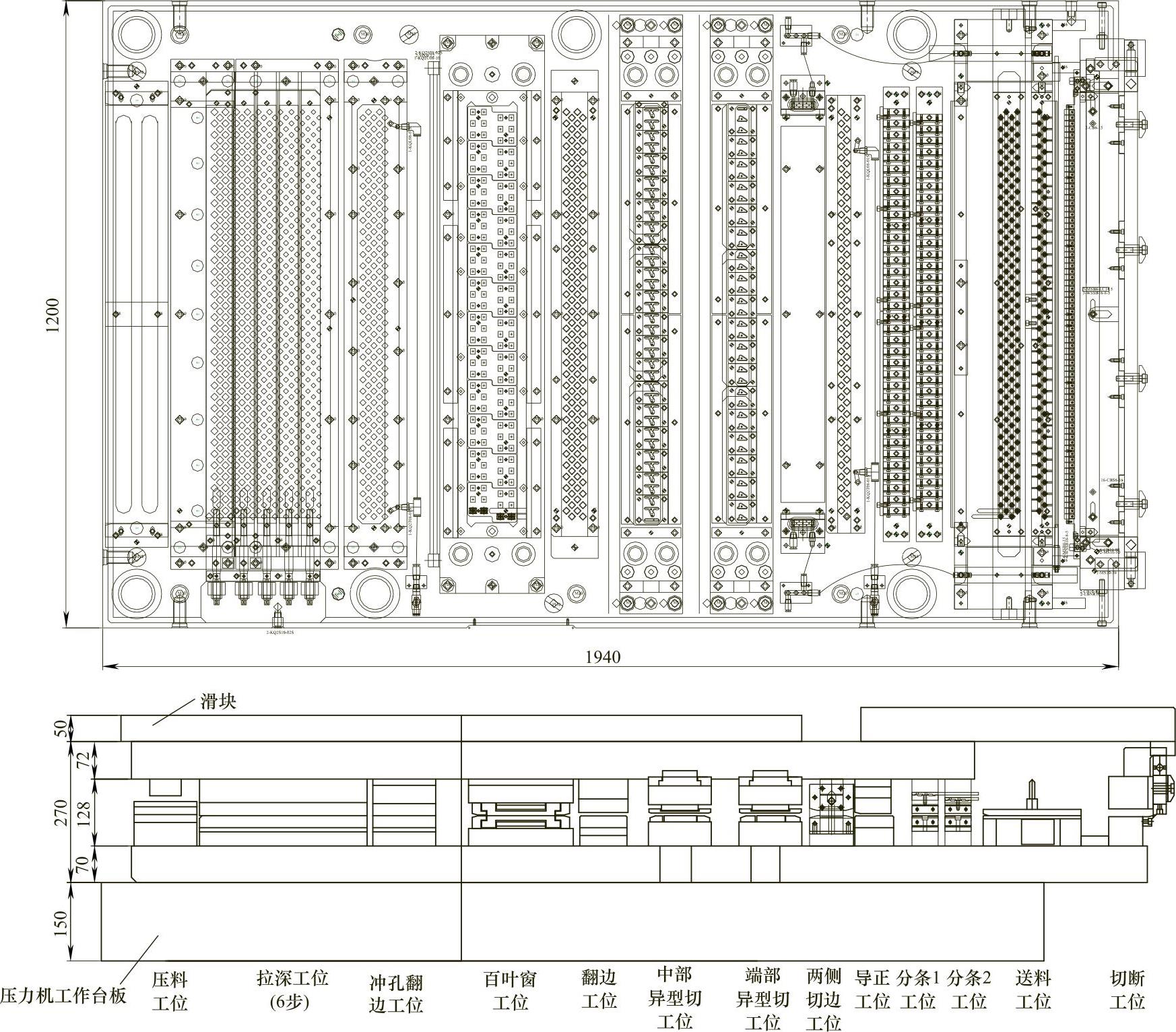
图3-50 模具整体结构示意图
注:1.第1~第5步拉深高度可调。2.翻边高度可调。3.分条可根据产品需要进行切换调整。4.中部、端部异形切模、切断模动作由压力机PLC控制气缸完成。
8.大模架的结构设计
根据排样图,大模架的长度为1940mm,宽度为1200mm。为了保证大模具的整体导向精度,采用六导柱滚珠模架结构。下模架厚度取70mm,上模架厚度取70mm,模架材质选用P20钢,导向部分采用标准结构设计。
(1)导正部分设计 空调换热器翅片多工位级进模重复运动精度是靠滚珠导柱、导套来保证的。大模架的导向部分采用国家标准的导柱、导套结构,由专业生产厂家生产,设计时,只需按标准设计相应安装尺寸即可。图3-51所示为滚珠导柱、导套结构图。
为保证模具的导向精度,除大模架采用6副大的滚珠导柱、导套导向外,每套分模架也分别采用4副小滚动导柱、导套导向。同时,各套分模采用直杆型定位销钉,与上、下大模架实现精确定位,以保证高的步进精度,如图3-52所示。
(2)大模架与压力机的固定方式 用8个M20内六角螺栓将上模架的上平面与压力机滑块下平面连接固定;用6个M20内六角螺栓将下模架的下平面与压力机工作台板上平面连接固定;大模架与压力机定位采用2对φ19.05H7/f8定位销、孔,将下模架与压力机工作台板面固定。
9.模具主要精度的确定
(1)步距精度 是确定级进模精度的主要参数,直接影响翅片的最终尺寸精度。模具步距精度愈高,翅片尺寸精度也愈高,但步距精度过高会使模具制造困难,所以步距精度的确定,必须根据实际要求确定。
(2)影响步距精度的主要因素 主要因素有制件的精度等级、形状复杂程度、制件材质和厚度,模具工位数、V带料送进方式和定距形式。
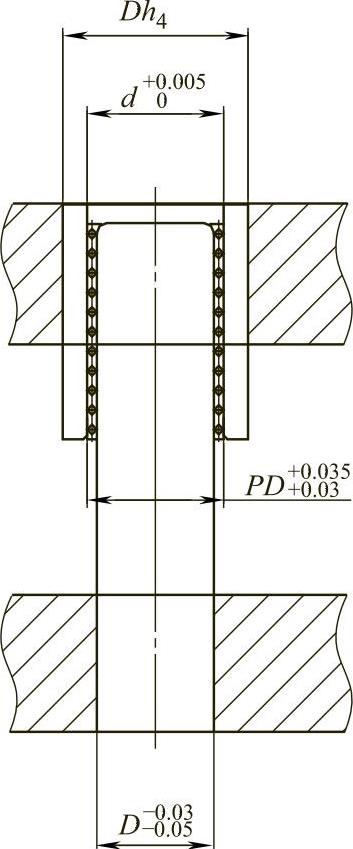
图3-51 滚珠导柱、导套结构图
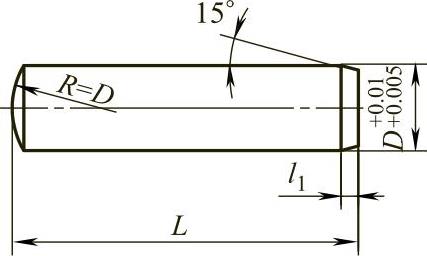
图3-52 直杆型定位销钉
精密多工位级进模的步距精度,可用下面经验公式表示

式中 Δ——多工位级进模步距对称偏差值(mm);
β——带料在送料方向上的最大轮廓尺寸公差,根据翅片产品长度为0.1mm,提高2或3级后,公差β取0.05mm;
n——模具设计工位数(包括空位,本例中为35);
K——修正系数,当冲裁双面间隙值在0.01~0.03mm时,取0.85。
代入经验公式(3-10)可求得步距精度Δ≈±0.006mm。
(3)带料定位精度 在多工位级进模中,带料的定位累计误差直接影响制件的加工精度。定位累计误差不仅与模具制造公差和导正销精度有关,更重要的是与送料方式和导正销数量有关。因此在模具加工设备精度一定的条件下,可以通过设计不同的送料方式和不同数量的导正销,达到带料所要求的定位精度。
带料的定位累计误差可按下面经验公式计算

式中 Δ∑——带料的定位累计误差(mm);
K——修正系数(一般隔两工位有导正销时取1.4),本实例中带料定位精度主要取决于33号送料工位的送料精度和9号冲孔导正工位的冲孔导正销的数量,故这里精度系数取2.8。
Δ——步距对称偏差(mm);
n——模具设计工位数(包括空位,本例中为35)。
由式(3-11)可求出带料定位累计误差为0.10mm。
10.拉深子模设计
(1)拉深子模整体结构(见图3-53)的确定 从工艺分析及排样图可知,首先进行的是拉深成形,拉深部分的拉深孔基本形由球形逐渐向柱形过渡。采用直径小的凸模顶入直径大的桶形凹模,形成拉深。
为便于坯料送进,避免零件表面划伤,拉深子模采用倒装模设计。倒装拉深子模装在上、下大模板之间:在上模架上安装凹模垫板、凹模固定板,凹模固定板利用吊装螺钉吊装在上模架上;在下模架上依次为拉深凸模高度调整装置、凸模固定板、压板、卸料板。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-53 拉深子模整体结构
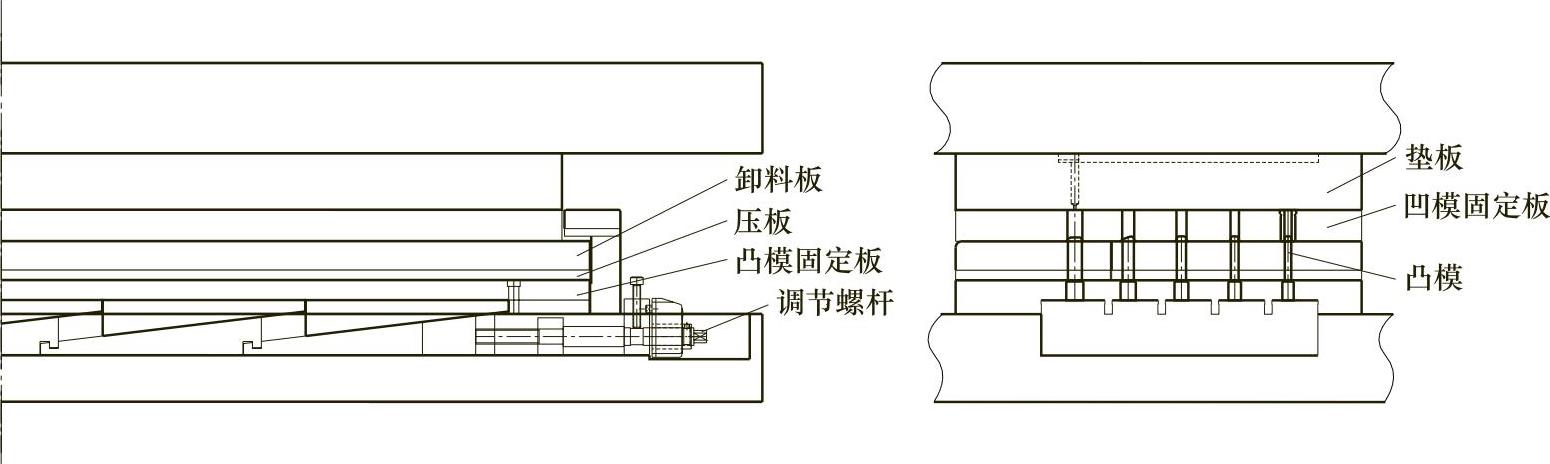
对于拉深凸模而言,由于使用中的磨损和不同毛坯特性的微小差异,要求拉深高度可以调整。采用斜楔机构来实现拉深、翻边的高度调节,其工作原理如图3-54所示。

图3-54 斜楔机构工作原理
在调整时,通过左、右旋转调节螺杆,使下斜楔前后移动,从而使总高(H)变化,达到调整凸模高度的目的。在调节螺杆上设有高度调节的数据显示,以便记录拉深凸模的拉深高度数据。
(2)拉深凸、凹模的结构设计 本实例中的拉深是为了提高翅片的翻边高度,采用图3-55所示的柱-柱结构,由球形拉深过渡到圆筒形拉深,柱形凸、凹模之间存在一定的间隙,其单边间隙一般为毛坯料厚+0.15mm。

图3-55 拉深凸、凹模的结构
1)凸、凹模直径及圆角尺寸的确定。根据经验,对铝、黄铜、纯铜等材料,在料厚小于3mm时,圆角半径可按料厚的5~8倍选取,对第一次拉深和薄料尽量取大值,以后拉深凹模圆角半径可按下面经验公式选取。
r凹n=(0.6~0.9)r凹(n-1) (3-12)
式中 r凹n——第n次拉深的凹模圆角半径;
r凹(n-1)——第n-1次拉深的凹模圆角半径。
为了节约模具材料,凹模板厚度取20mm,内部拉深孔有效深度取8mm,凹模板采用吊装螺栓固定。
凸模圆角太小时,会使材料在这个部位弯曲程度增加,且局部变薄现象加重,这种弯曲和变薄的痕迹会留在零件侧壁上,影响零件的质量,过小的r凸还会增加该工序及后序的成形难度。增大凸模圆角半径则,可降低所需的拉深力,增加毛坯危险断面的强度,改善工件质量。但r凸过大,会使拉深时底部被压面积减小,材料悬空部分比例增大,容易使这部分毛坯起皱,所以凸模圆角半径应大小适中。拉深件精度主要取决于最后一道拉深工序凸、凹模的尺寸。一般最后一道拉深时取
r凸=(0.08~0.12)d (3-13)
式中 d——拉深凸模直径,而相邻各级拉深取
r凸=(0.7~0.8)r凸(n-1) (3-14)
式中 r凸(n-1)——第n-1次拉深时的凸模圆角半径。
根据前述确定的拉深系数和拉深直径,参照上面的圆角半径计算公式,确定出凸、凹模的主要结构尺寸和圆角半径,见表3-16。
表3-16 凸、凹模的主要结构尺寸和圆角半径 (单位:mm)
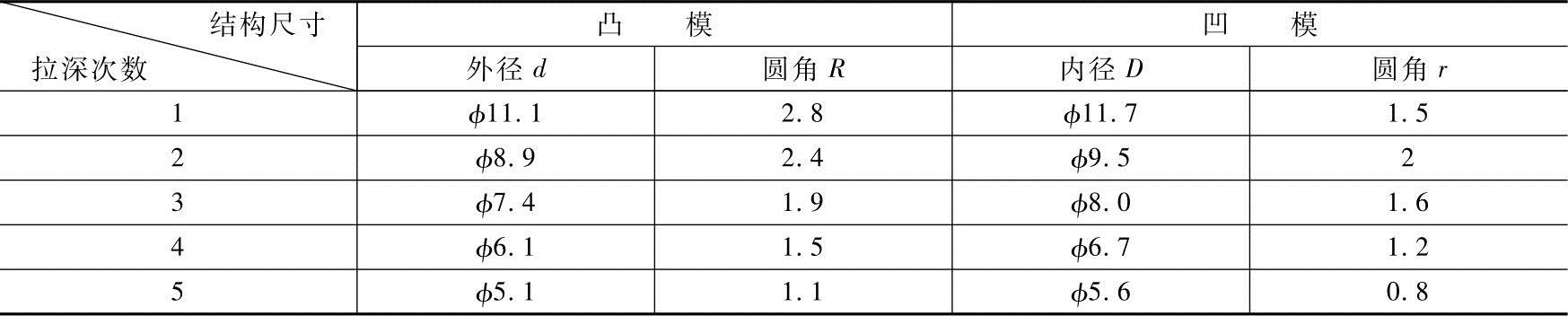
拉深凸模的材料取SKD-11,热处理硬度为60HRC,凹模材料取PX-5。
2)凸、凹模的制造公差。在没有严格尺寸要求的前提下,凸模及凹模的制造公差δd及δp一般按IT6~IT9级选取,或根据经验表选取,当被拉深板料厚度小于0.5mm,拉深直径小于20mm时,一般取凸模直径的极限偏差为±0.02mm,凹模直径的极限偏差为±0.01mm。
3)拉深凸凹模的固定方式及导向精度。凸模的垂直度必须在凸凹模间隙值的允许范围内,在本实例中,拉深凸模的垂直度公差等级取8级。
凸模采用浮动固定方式,利用拉深凸模下面的斜楔机构调整高度,拉深凸模与固定板之间的双边配合间隙取0.015mm,以保证工作的稳定可靠。
4)卸料方式。在拉深过程中,由于形成的锥度较大,凸、凹模之间的间隙也较大,在拉深子模设计中,上模不用考虑卸料问题,对下模架上的凸模,借助凸模外侧的卸料板进行卸料。
11.冲孔翻边子模设计
冲孔翻边子模(见图3-56)在加工和产品成形中都占有重要位置。片料通过该子模时完成拉深整形、冲孔、翻边三道工序。将冲孔、翻边工序放在一个子模中来完成,减少了一个工位和模具的结构尺寸,降低了模具的制造成本。
(1)拉深整形的设计 这是个典型的筒形拉深,必须考虑凸、凹模之间的间隙。根据经验,拉深凸、凹模之间的单边间隙,一般按C=(1.0~1.05)tmax选取。由于在前面的多道拉深中材料有所减薄,所以可确定单边间隙C取tmax+0.05mm。拉深间隙值确定后,对内形尺寸一定的工件,以凸模为准,凹模尺寸按凸模直径放大,以取得合理间隙。
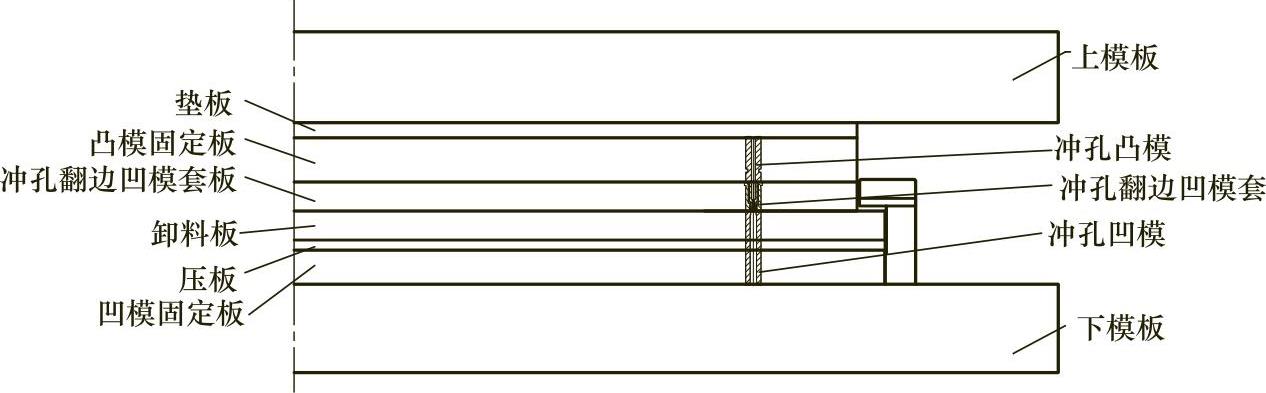
图3-56 冲孔翻边子模
整形凹、凸模的圆角半径,要依据翅片的结构尺寸来定:取r凹=0.4mm,R凸=0.55mm,凸模外径D=5.2mm,凹模内径d=5.5mm。
(2)冲孔翻边模的设计 为防止冲孔废料粘在片料上,出现重叠冲压现象,在冲孔凸模设计时,在凸模上设计有通气孔,借助高压气孔的吹料作用,使冲下的废料能顺利通过凹模和压力机下工作台板的落料孔,进入废料箱,以免废料粘在凸模上影响加工的顺利进行。
在冲孔翻边工序中,上模为台阶式结构,下模为凸、凹模复合结构(见图3-57),既是落料凹模,又是翻边凸模。下模作为冲孔凹模,里面为双直壁结构(见图3-58),这有利于减小凸模与凹模之间的磨损,双直壁间的半径差为0.5~1mm,高度差为2~3mm。
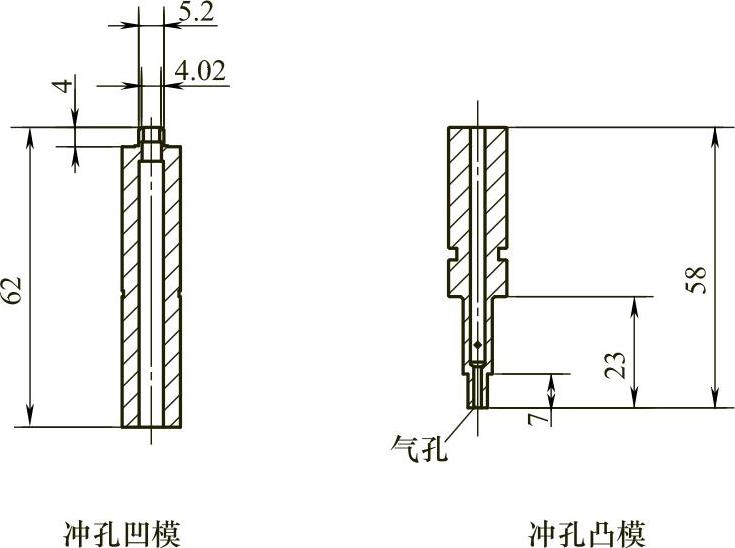
图3-57 凸、凹模复合结构
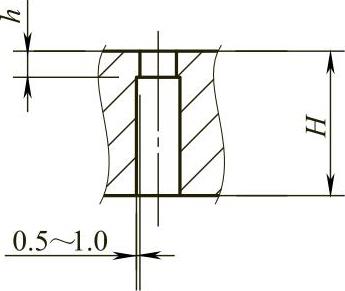
图3-58 冲孔凹模里面为双直壁结构
1)冲孔模具加工方式的确定。对于圆形等形状简单的工件冲裁,为了保证互换性,凸模和凹模刃口尺寸和公差将分别标注,分别加工,其优点是凸、凹模具有互换性,便于模具重复制造,加工成本低。但凸、凹模分开加工时必须满足以下前提条件
δp+δd=Zmax-Zmin (3-15)
式中 δp、δd——凸、凹模的制造公差;
Zmax、Zmin——冲裁最大和最小间隙。
2)冲孔模具冲孔间隙的确定。冲孔凸、凹模间隙对冲裁件质量、冲裁力、模具寿命等都有很大影响。因此,在设计和制造模具时,要选取一个合理的间隙值。考虑到模具制造中的偏差及使用中的磨损,生产中通常选择一个适当的范围作为合理间隙。设计与制造新模具时,采用最小合理间隙值。由于理论计算间隙的方法在生产中不便于应用,国内有关专家经过对国外五种间隙(即小、较小、中等、较大和大)的研究,将冲裁间隙分为Ⅰ、Ⅱ、Ⅲ三种类型,制定了自己的间隙选用表。目前广泛使用的是经验数据。通过查相关冲模设计手册可知,在冲裁铝箔时:
2Cmin=0.01mm,2Cmax=0.03mm,这里取双面间隙zmin为0.02mm。
3)凸、凹模制造公差的确定。凸、凹模的尺寸设计与加工方法有关,加工方法可分为分开加工和配合加工两种,配合加工又分为先加工凸模,配作凹模和先加工凹模,配作凸模两种方式。由于分开加工方案有利于凸、凹模的互换,并可降低加工成本,本实例采用分开加工的方案。
冲裁件的尺寸精度是由模具精度决定的,并随着凸、凹模工作部分尺寸公差等级的提高而提高,但低于后者2或3级。在本实例中,孔径公差根据产品要求为φ5.2mm±0.05mm。
实践证明,冲裁凸模的工作部分尺寸决定冲孔件的内孔尺寸,凹模的工作部分尺寸决定着落料件的外形尺寸。凸、凹模与冲裁断面间的摩擦,使冲孔凸模工作部分尺寸因磨损而变小,导致冲孔件内孔尺寸随之变小。所以冲孔时,应先确定凸模工作部分尺寸,其大小应取接近于或等于孔的最大极限尺寸,保证凸模磨损到一定尺寸范围内,仍能冲出合格的冲孔件。凹模直径的公称尺寸应比凸模直径的公称尺寸大一个最小合理间隙值。
凸、凹模的制造公差一般取Δ的1/4~1/3(Δ为工件的尺寸公差),若采用分开加工方法,由相关冲模设计手册可知,凸模制造公差δ必须满足以下两式
δ≤0.4(2Cmax-2Cmin)=0.008mm (3-16)
δ≤Δ-ms (3-17)
其中Δ=0.1mm,根据冲模设计手册取ms=0.05mm,即δ≤0.05mm,与式(3-16)结果比较,最终确定δ=0.008mm。
对应凹模的制造公差可取δ'=2Cmax-2Cmin-δ=0.012mm。
4)冲孔凸、凹模设计要点。为了保证翻孔凸缘的挺直,凸、凹模之间的间隙Z/2一般取略大于材料厚度t,这里取0.15mm。冲孔凹模采用平顶圆弧过渡结构,圆角R取0.55mm。冲孔翻边凹模套圆角半径一般取(0.2~0.5)t,但不能小于0.2mm,本实例直接取零件图要求的半径R0.4mm,结构与拉深凹模相同。
(3)卸料方式的确定 在整形工序及翻边工序中,拉深形成的筒壁逐渐变成直壁,为了防止坯料卡在凸模或凹模上,需要考虑卸料问题。下模架上的冲孔凹模,通过卸料板进行卸料;对上模架凹模中的坯料,由于卸料力小,采用卸料钉结构(见图3-59)进行卸料。
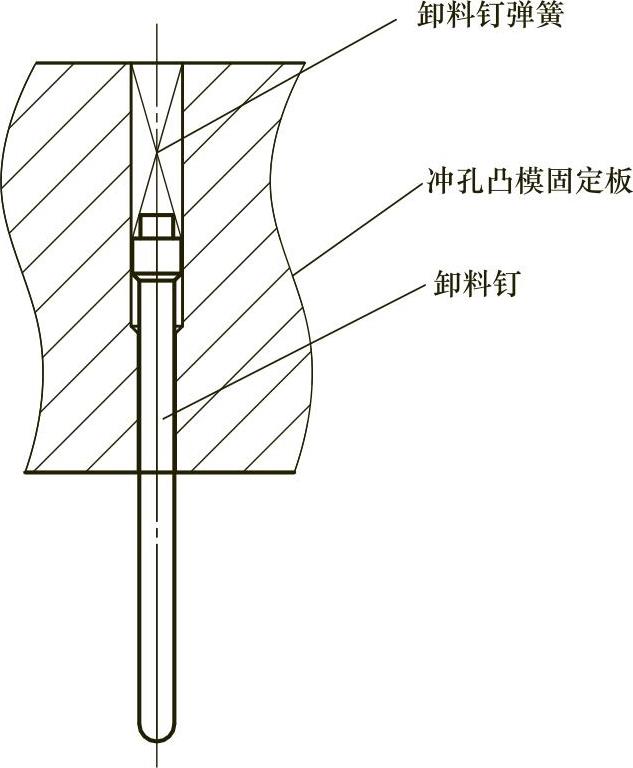
图3-59 上模卸料钉结构
12.二次翻边模设计
(1)整体结构 二次翻边模上模由斜楔固定板、翻边凸模固定板、卸料板组成;下模由凹模板、下垫板组成(见图3-60)。卸料板通过钩板扣在翻边凸模板上,运动时通过导柱、导套进行导向及定位。卸料板在冲压过程中起卸料作用,还对铝箔起压紧作用。斜楔固定板和翻边凸模固定板与上模板之间的相对位置,通过φ10mm销钉来定位。在上模板与斜楔固定板之间设有斜楔调整机构,可对二次翻边高度进行调整。下模为可拆卸结构,与下模板之间的相对位置由插销来定位。
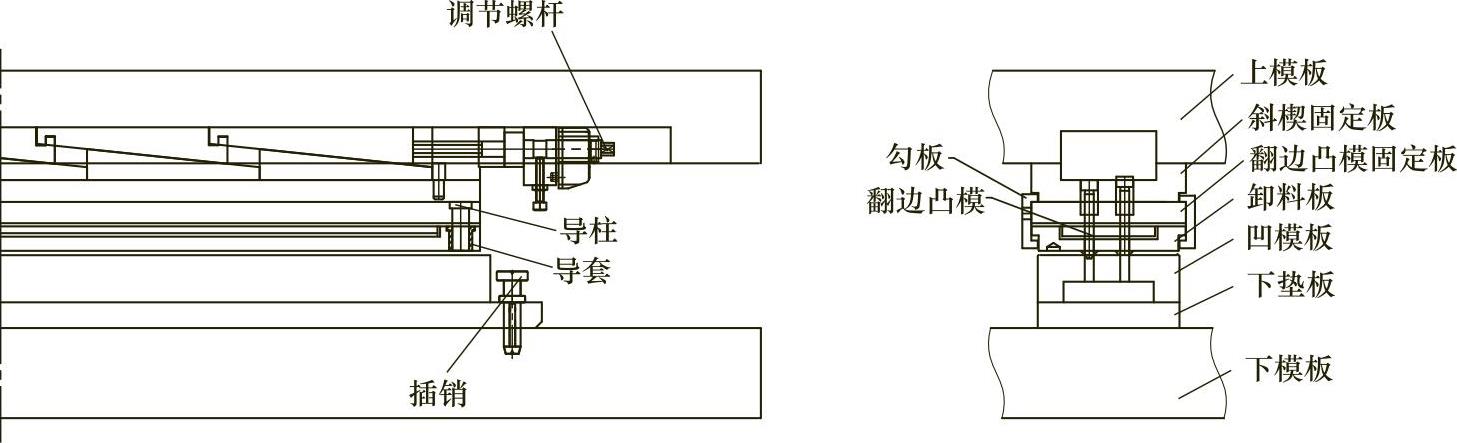
图3-60 二次翻边模
(2)二次翻边模的设计 在产品图中虽对翻边未做严格的尺寸要求,但翻边后的边缘不能出现裂口缺陷,否则产品有可能报废。翻边凸模对翅片冲压还具有导正功能。
翻边凸模前端近似椭圆头结构,并有一段直径为φ5.2mm的圆柱部分,可对冲压中的翅片进行导正和定位。
翻边时,翻边凸模前端椭圆头先进入片料孔内,对片料进行导向定位,再由圆柱部分进行精确定位,然后通过台阶圆角向下翻横边,翻边凸模具有导正翻边双重作用。翻边凸模结构如图3-61所示。
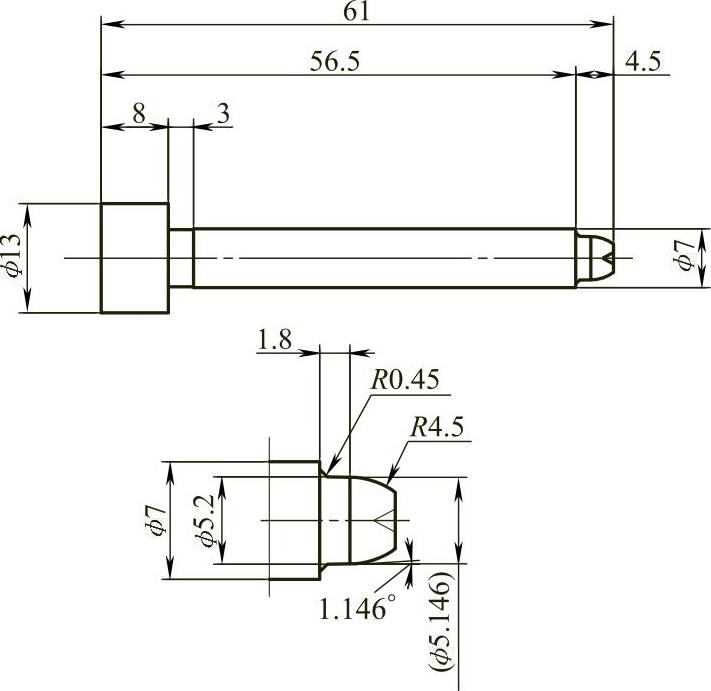
图3-61 翻边凸模结构
13.切边模设计
切边模的作用是将翅片带料两侧边多余的边料冲剪去,以达到图样的尺寸要求,切边模通过M8螺钉固定在下模板上,其结构如图3-62所示。
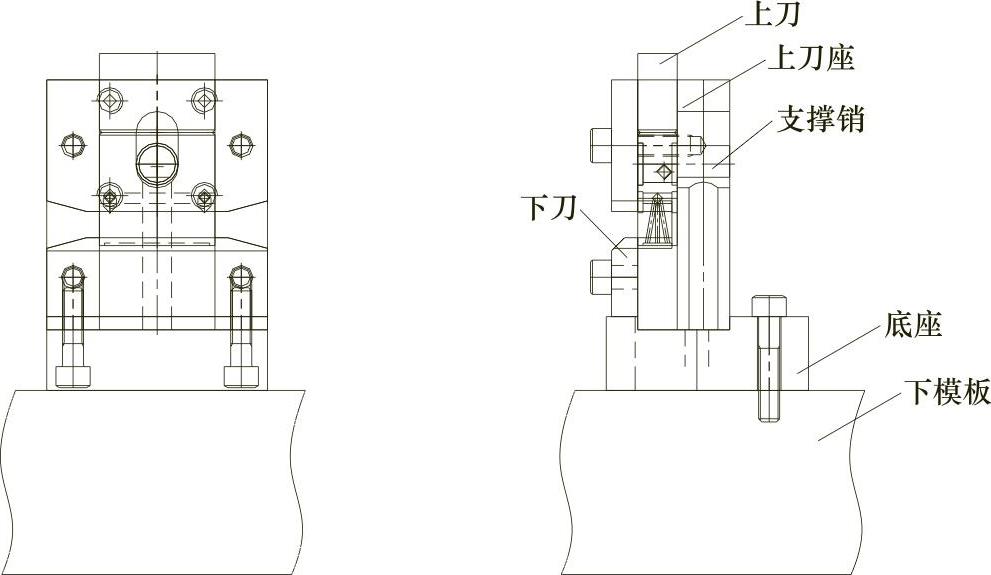
图3-62 切边模结构
14.导正模设计
导正模在整个模具中起到稳定材料、保证送料步距精确的作用。导正模置于在分条模之前,通过导正模的精确定位,可使分条模对产品按一定宽度切分更加均匀。其结构如图3-63所示。
15.百叶窗成形模设计
百叶窗成形是在翅片上开出带角度的窗形形状,通过扩大翅片的散热面积,来达到提高翅片换热器热交换率的目的。
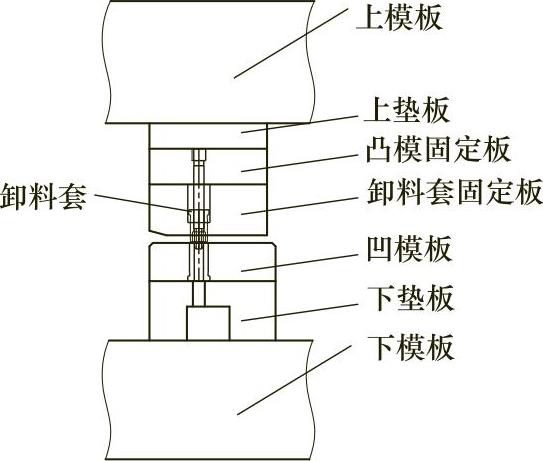
图3-63 导正模结构
百叶窗成形模的上模,由上垫板、上子模板、上凸模垫板、上凸模固定板、上卸料板组成;下模由下卸料板、下凸模固定板、下凸模垫板、下子模板组成。上、下卸料板通过钩板,分别扣在上、下子模板上,运动时通过导柱、导套进行导向与定位。如图3-64所示。
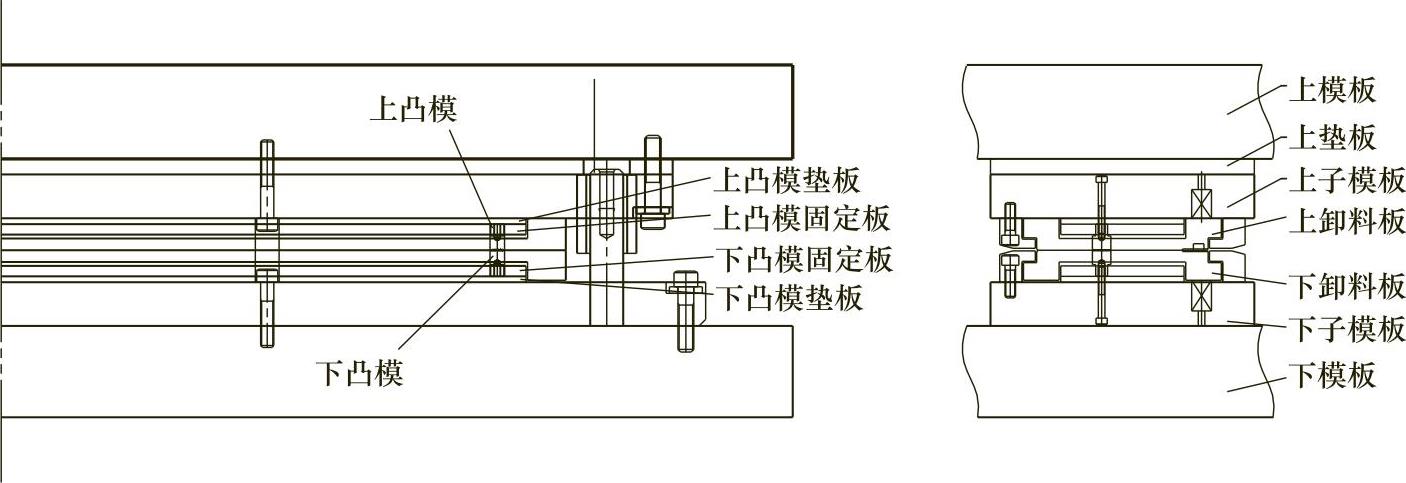
图3-64 百叶窗成形模
16.异形切成形模设计
在翅片上成形异形形状,是使换热器翅片在胀管后可在一定幅度内进行折弯,或满足换热器翅片工艺让位的需要,以满足缩小换热器翅片产品体积的需求。
异形切成形模由滑动板、上子模板、凸模固定板、卸料板、下凹模板、下子模板组成。异形切成形模切与不切的切换,是通过气缸推动滑动板来实现的(见图3-65)。
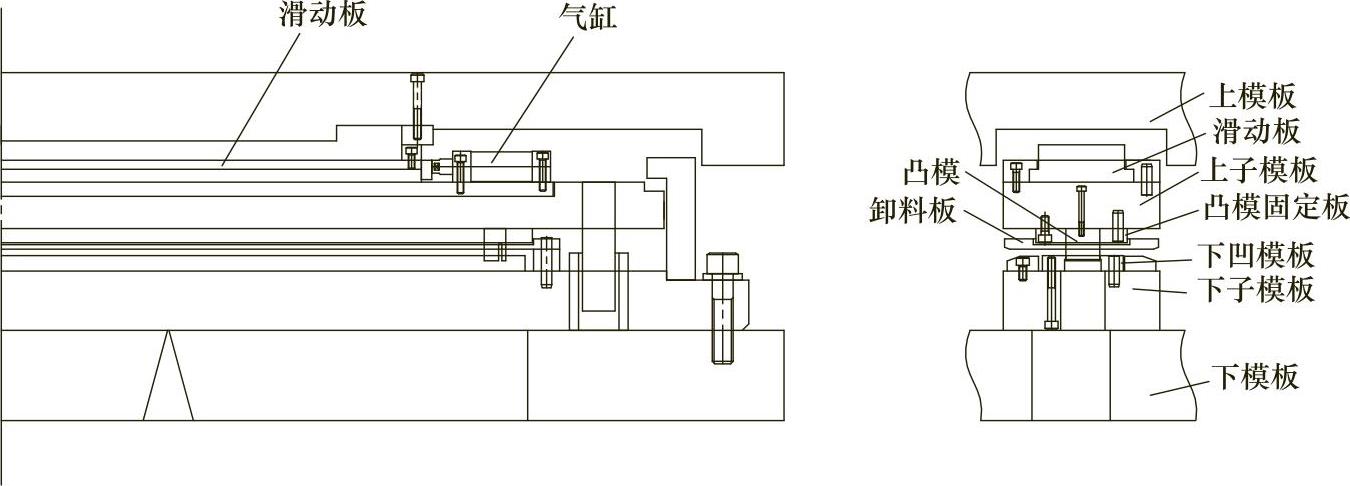
图3-65 异形切成形模
17.分条模设计
分条模是对带料按热交换器所需的装配孔排数进行分割,其结构如图3-66所示。
在上、下刀座之间均匀分布了71套切边分条模。上刀、下刀分别安装在上、下刀固定块上。在上刀座的定位槽与上刀固定块间,设有为6mm厚的垫刀条。在相应位置装上垫刀条,当上刀位置下降时,则相应的分条刀起作用,通过拆装垫刀条,来控制分条刀是否起作用,从而得到不同宽度的产品。
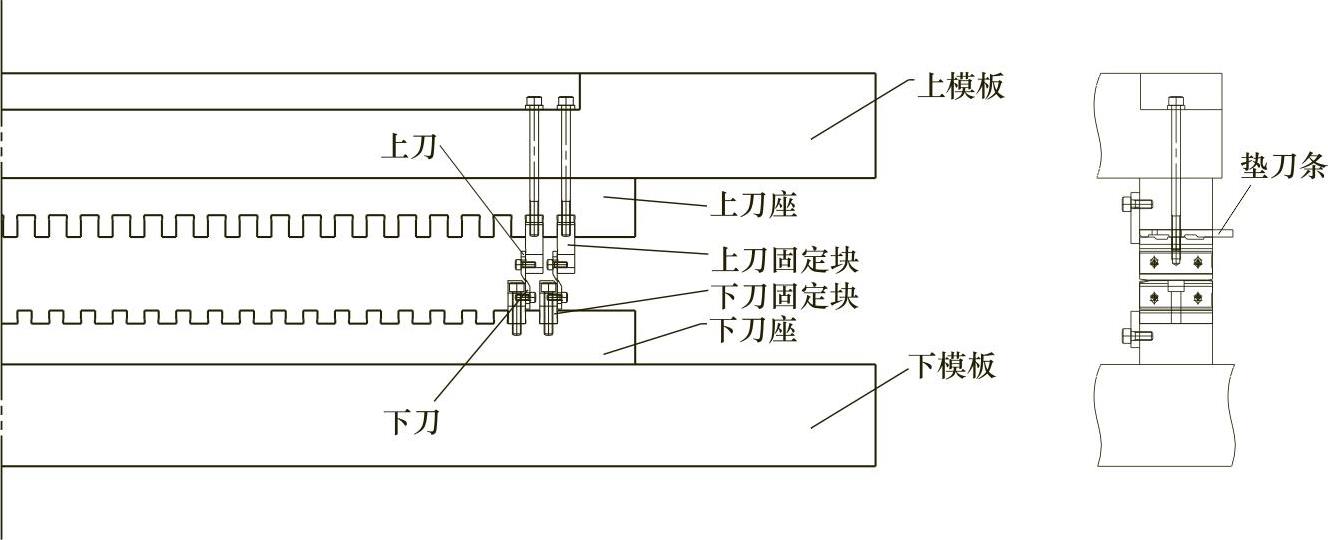
图3-66 分条模结构图
18.切断模设计
切断模是整套模具的最后一个分模,是唯一一个装在上模架之外的一套子模,如图3-67所示。
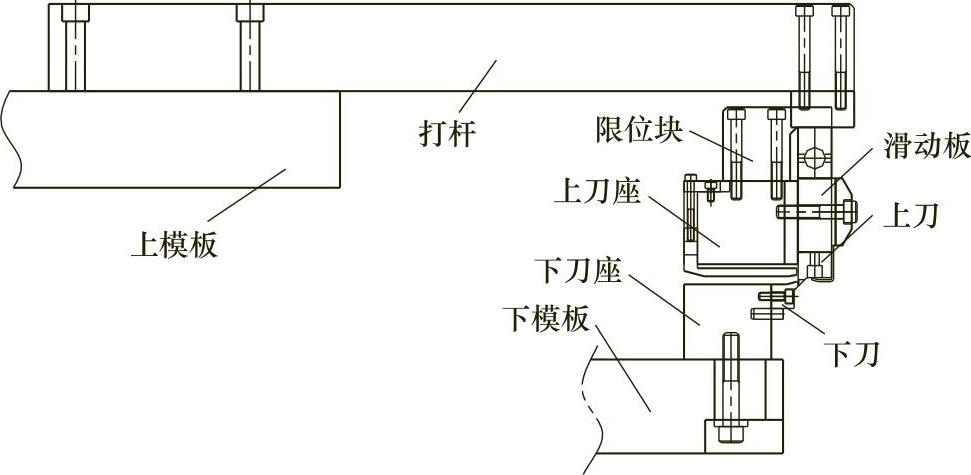
图3-67 切断模
由于翅片长度由零件上每排孔的数量决定,压力机滑块运行一次只能完成一列孔,完成一定长度的翅片长度,需要压力机完成多次冲压后才能切断一次。因此,为了实现自动控制切断动作,保证翅片级进模的正常运行,在压力机上必须借助滑块机构之外的其他动力(气动),同时这个动力还需受压力机滑块运动的控制。因此,在该套级进模的设计中,应用自动控制技术是必不可少的。
由于压力机上已具有PLC控制装置,子模上只需要设计相应的控制模块,直接借用压力机上的PLC控制装置来实现动力的控制。
19.送料结构设计
(1)传动结构设计 送料机构的传动是由两部分机构实现的,即压力机曲柄摇杆机构和送料滑块机构联合作用,传动结构示意图如图3-68所示。
在压力机输出轴上装有偏心盘(送料曲柄),通过调节拉杆带动送料滑块机构(带动送料连杆、曲柄、送料活动板)做往复运动进行送料。通过调整偏心盘(送料曲柄)可以控制摇杆摆动的角度,从而控制送料的送料步距。
送料传动连杆与压力机主轴曲柄的相位应一致,当压力机滑块在下死点(合模)时,送料活动板在后端点,送料结束;当压力机滑块上行到上死点(开模)时,送料活动板处于前端点,准备送料。送料动作顺序见表3-17。
表3-17 送料动作顺序表

(2)送料子模的基本结构设计 级进模的步进是靠送料子模来完成的,其基本结构如图3-69所示。主要由送料活动板、送料活动指、送料固定板、送料固定指、送料导杆组成。
送料活动板与送料导杆为过盈配合,不产生相对运动。送料时,送料活动板上的送料活动指挂住翻边孔将翅片送一个步距。送料活动板返回时,送料固定板上的送料固定指挂住翻边孔支撑,防止翅片带料后移,保证步距不变。为了保证滑块往复移动的稳定性,滑块利用两根导向杆进行导向,通过送料传动轴,同时驱动左右两套曲柄连杆,带动滑块进行送料。
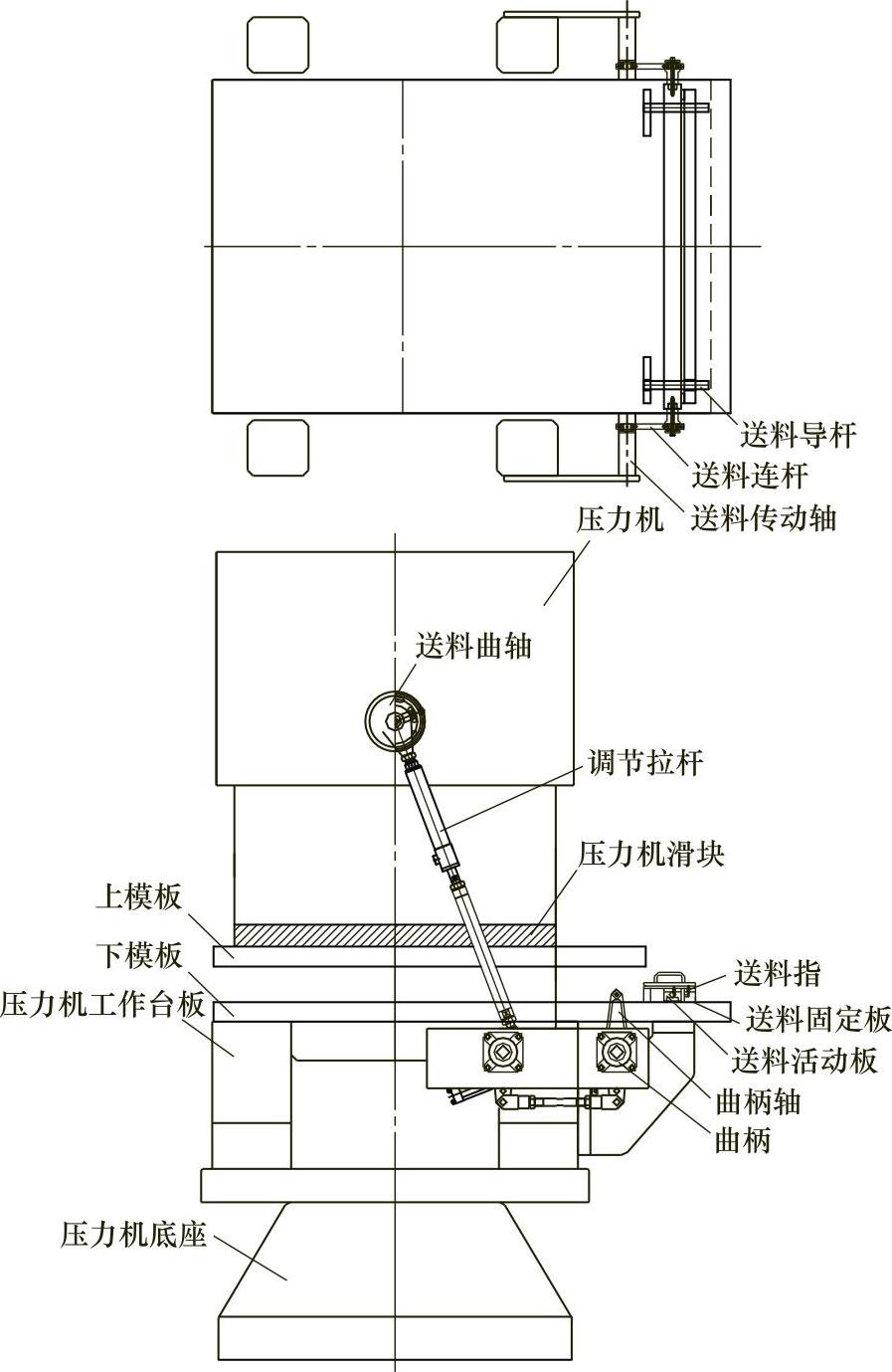
图3-68 传动结构示意图
(3)送料起始位置的确定 由于冲压的带料是厚度为0.095mm的箔料,较软,易折弯,同时加上模具的各种冲压作用,有可能产生一定的变形,因此在送料活动板送料之前,实际带料位置与理论位置将会存在一定随即误差Δ,而送料指与翅片翻边孔的间隙在0.02~0.03mm之间,如果随即误差Δ超过这一间隙值,那么送料指就不能套进翻边孔内,无法完成送料功能。因此需调节送料起始位置,将实际位置后移理论位置2~3mm,利用送料指的弹性功能,前移时自动套入翻边孔内,补偿由于带料铝箔变形而产生的随即误差,实现精确送料。
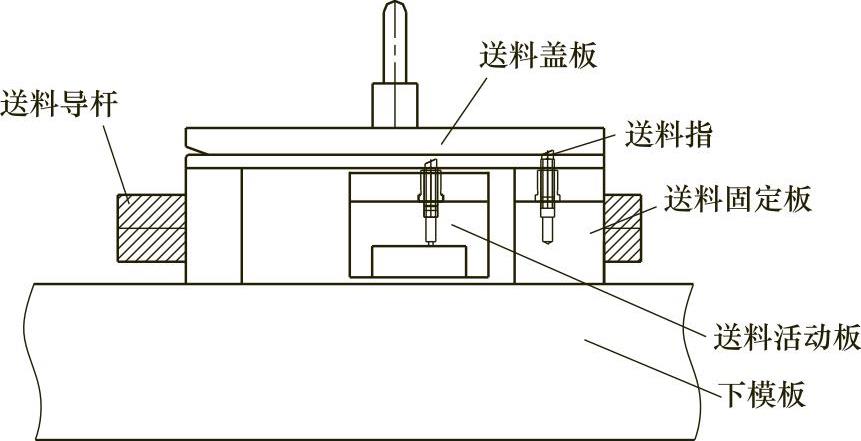
图3-69 送料子模的基本结构
(4)吸风接料装置 包括接料架和基座。接料架固定在可移动推车上,接料架上有若干接料针,接料针穿过集料板和接料针座,并与接料底座连接。接料针座可沿接料底座上的导轨移动,以适应不同片长翅片接料的需要。托架通过直线滑动轴承可沿托架运动导轨升降。推车与基座有定位装置,初定位通过导向板与卡槽实现,精定位通过推车定位块及基座定位块、推车上的限位块及基座上的限位块来实现,经过二次定位可使接料架与压力机定位精确。接料高度的设定可通过电动机、动力传递系统以及丝杆和直线导轨来实现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。