



搬运机械手模型、动作示意图和控制面板如图7-111所示;编程软元件分配表见表7-7,程序设计符号分配表见表7-8。
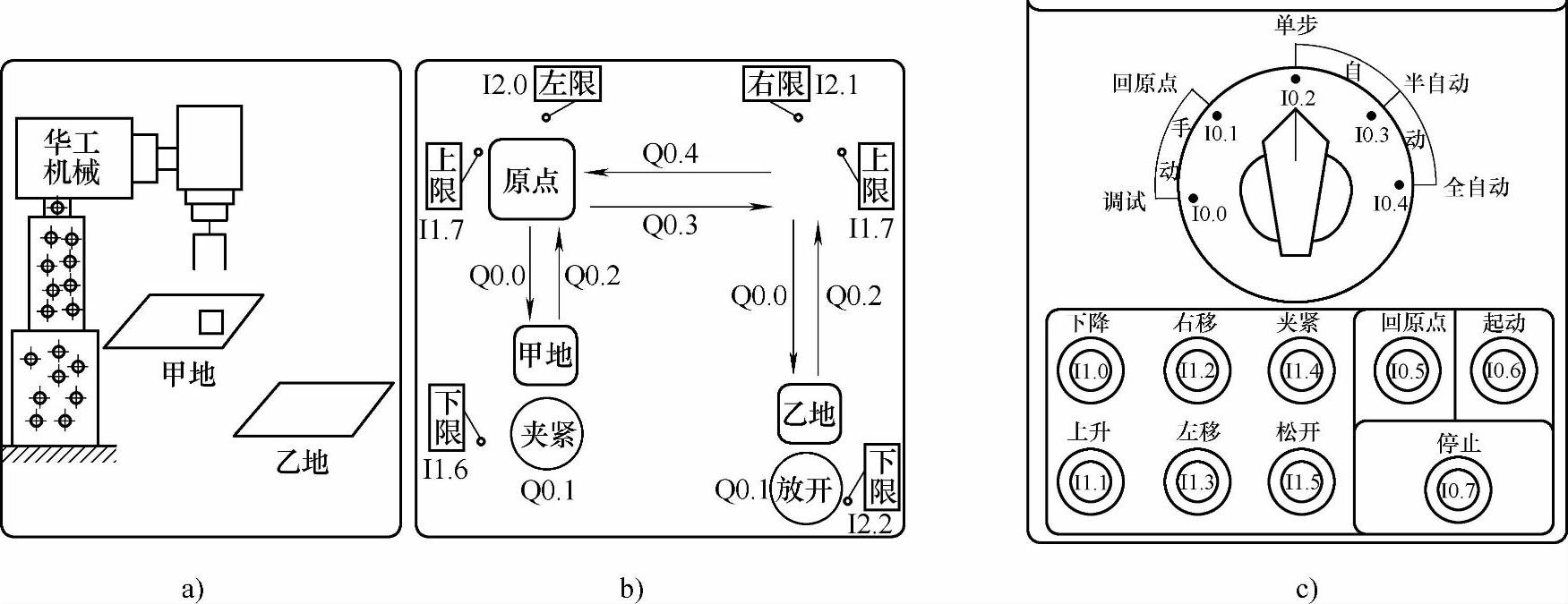
图7-111 搬运机械手模型、动作示意图和控制面板
a)搬运机械手模型 b)动作示意图 c)控制面板
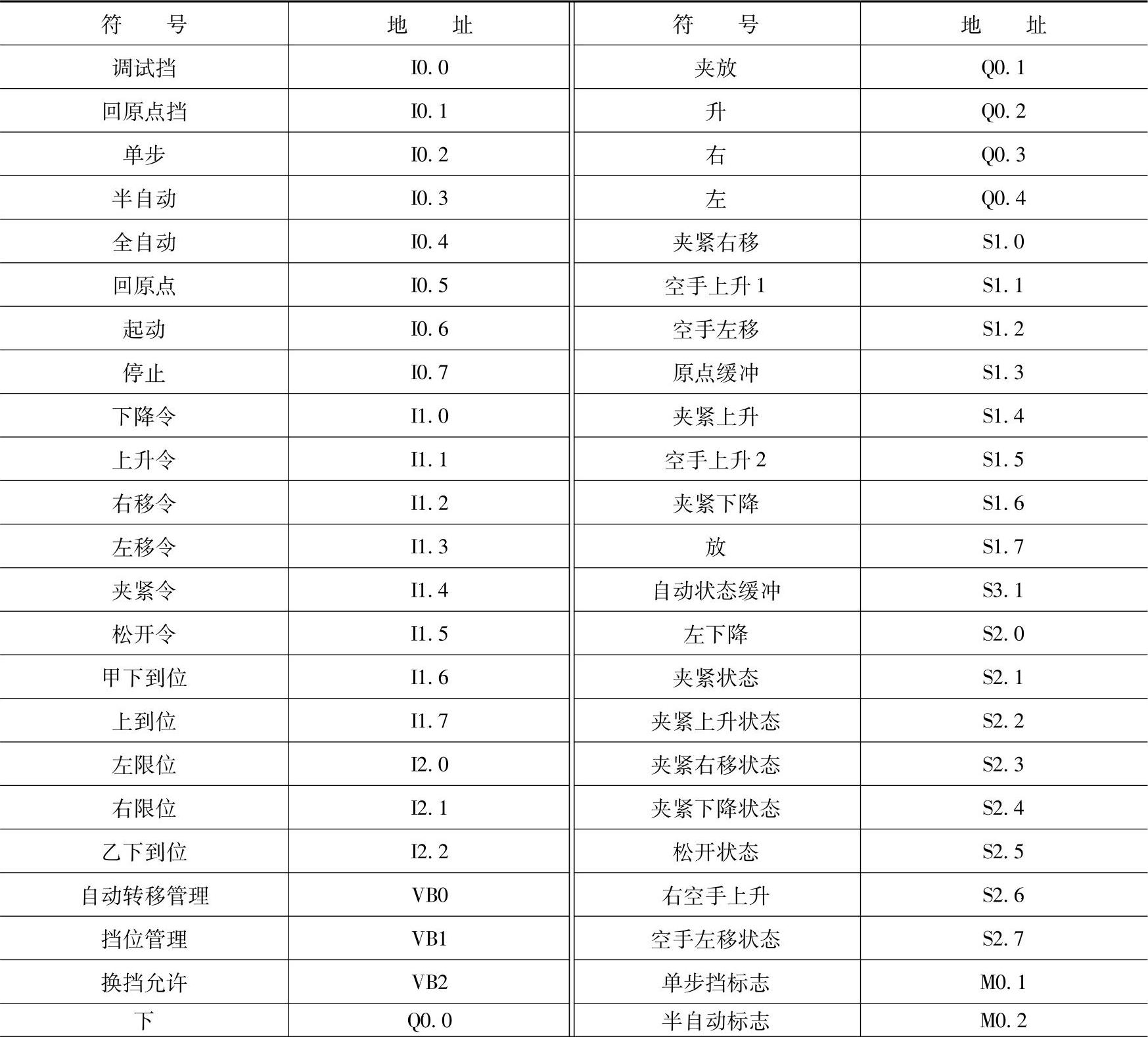
表7-7 编程软元件分配表
(续)
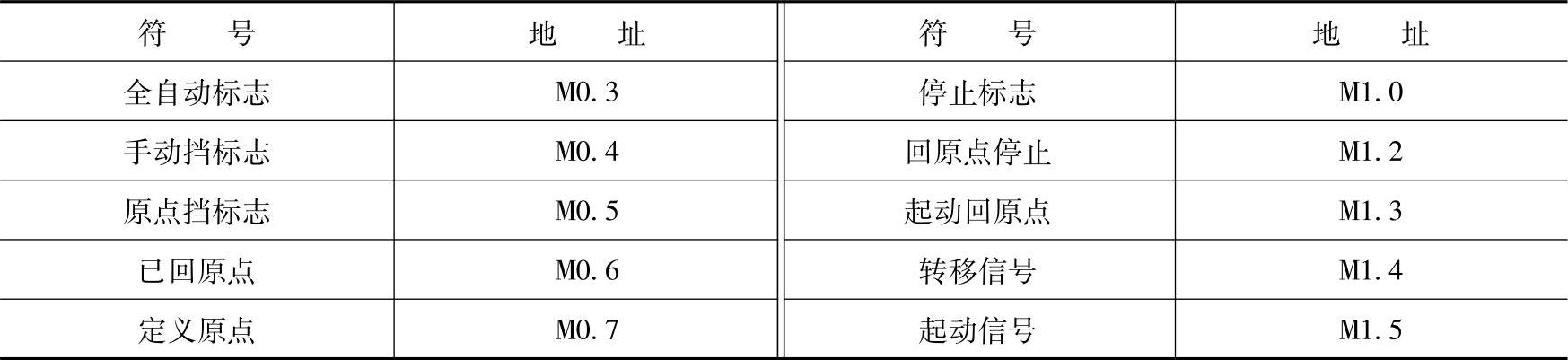
表7-8 程序设计符号分配表

搬运机械手控制系统的PLC程序如图7-112~图7-117所示。
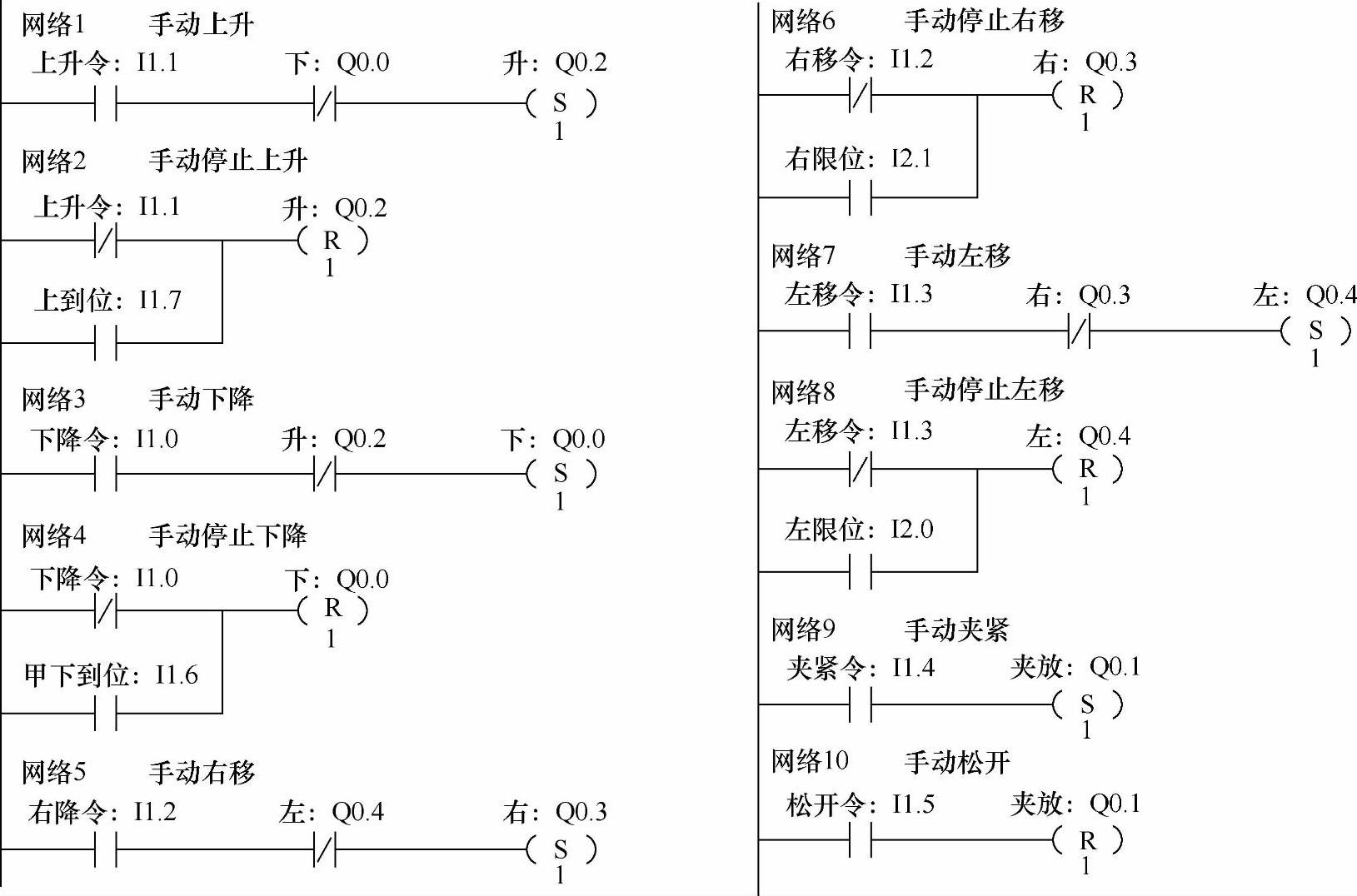
图7-112 手动调试挡子程序(SBR0)
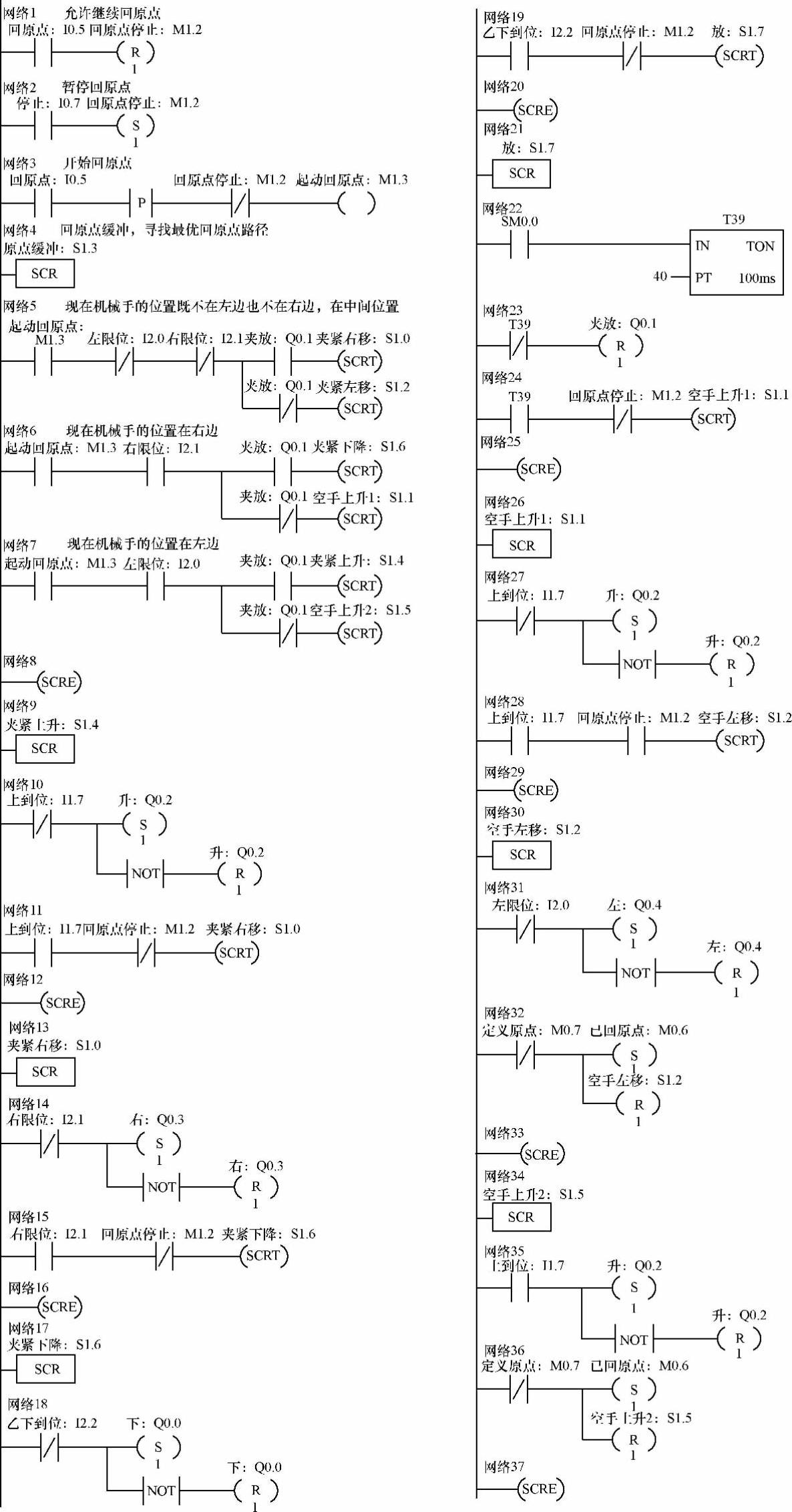
图7-113 回原点子程序(SBR1)
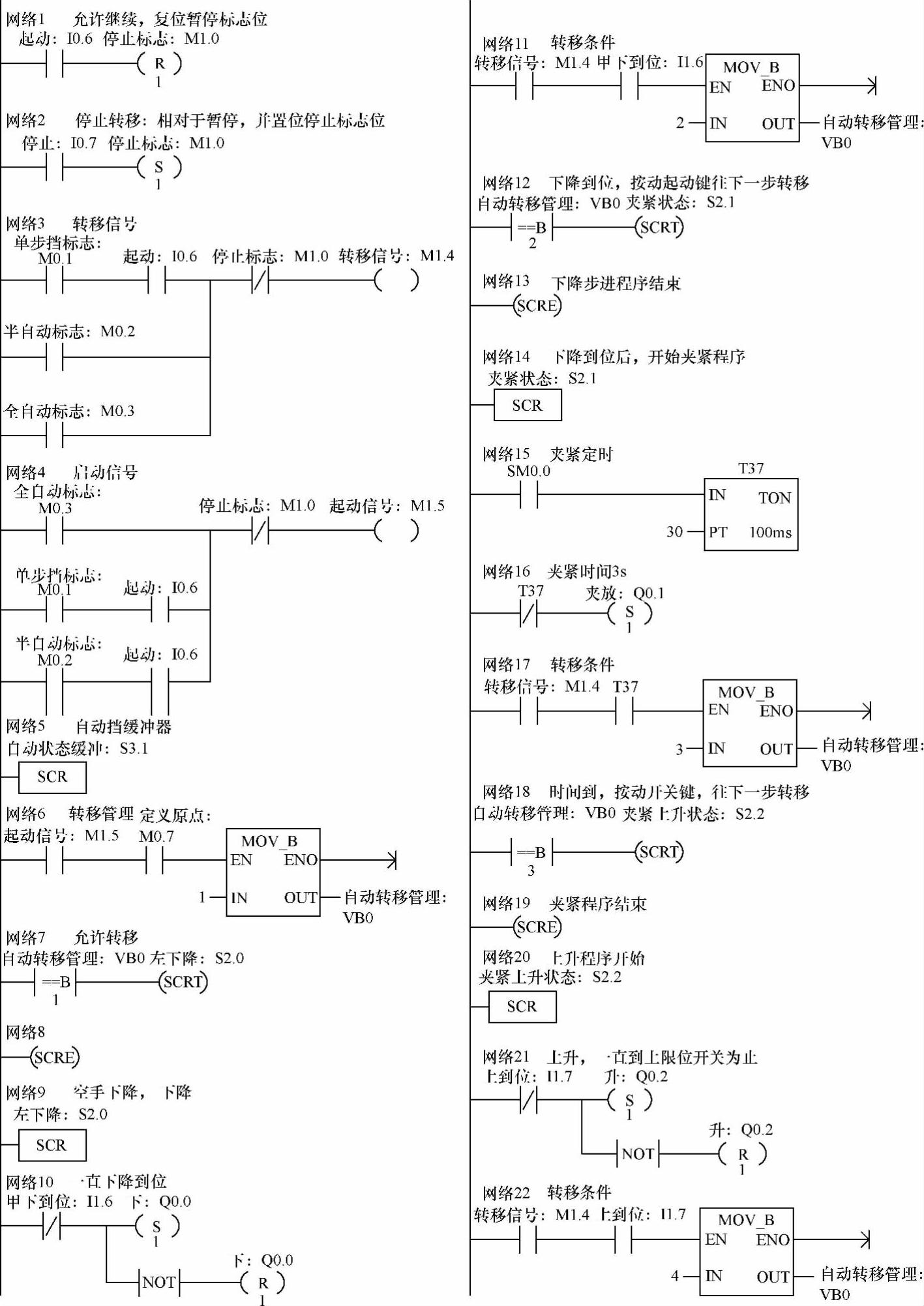
图7-114 自动挡子程序(SBR2)(1)
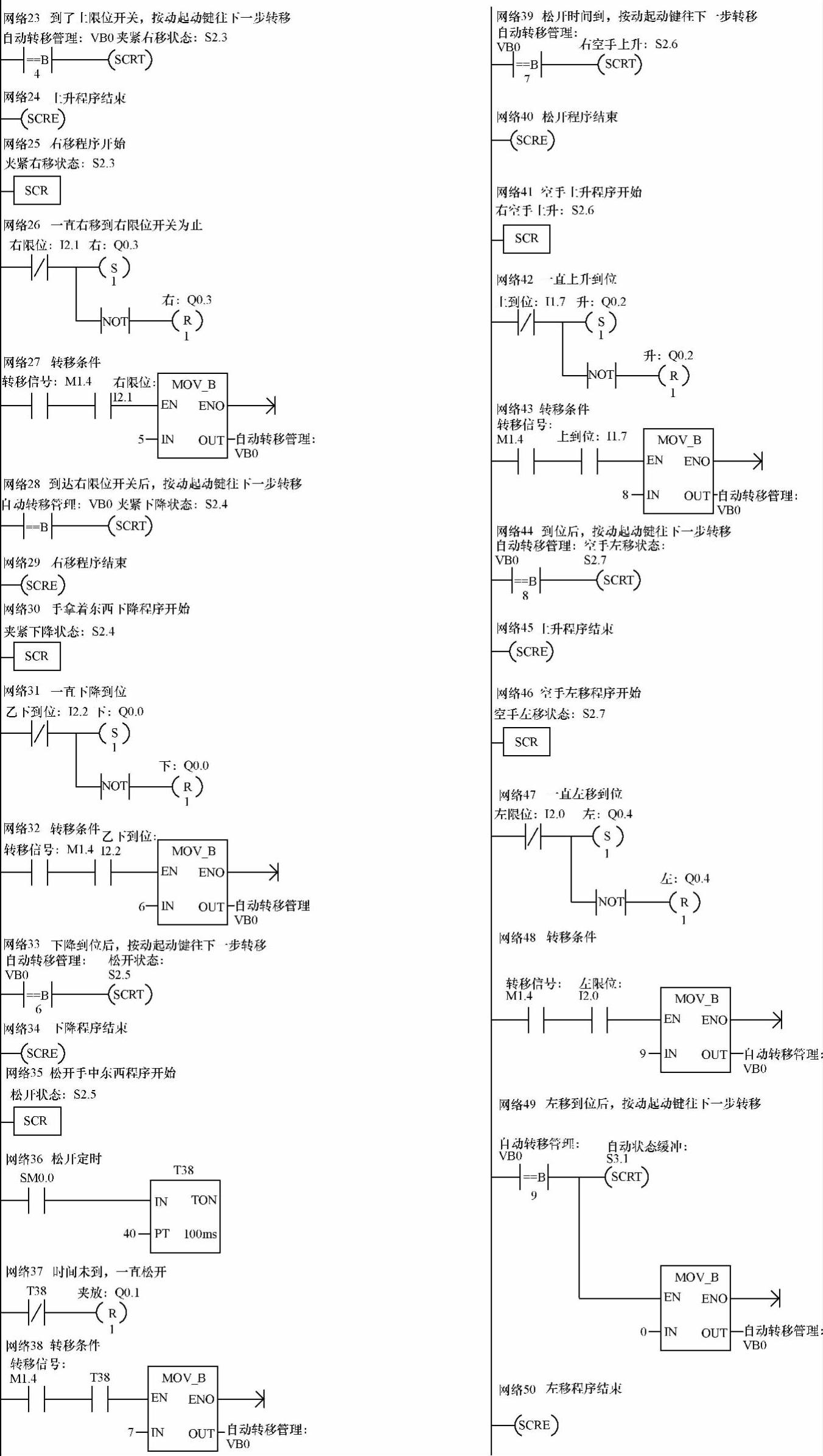
图7-115 自动挡子程序(SBR2)(2)
图7-116 挡位管理子程序(SBR3)
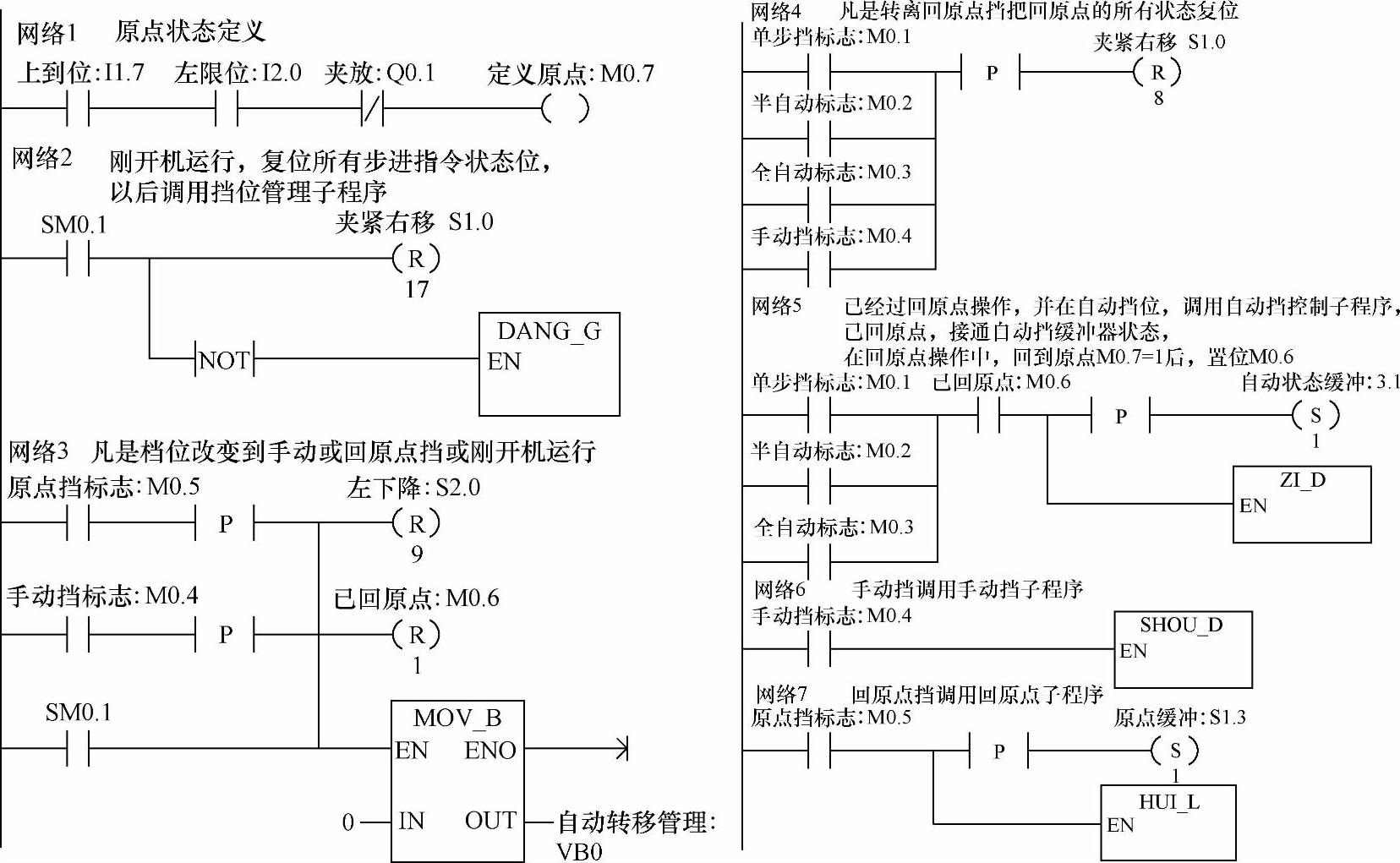
图7-117 主程序(OB1)(https://www.xing528.com)
首先把搬运机械手按照要求将输入与输出的线路接好,把图7-112~图7-117所示的控制程序下载到PLC中。
手动调试操作:把控制面板的挡位开关扳动到调试挡位置,I0.0接通,监控PLC的程序,这时执行主程序、手动调试子程序和挡位管理子程序。点动I1.0和I1.1,使搬运机械手上下移动,这时要特别注意上限开关和下限开关位置是否合适?如果不合适,首先要小心调整开关位置使其位置合适;再点动I1.2和I1.3,使机械手左右移动,这时也要特别注意左限开关和右限开关位置是否合适?如果不合适,马上小心调整位置使其位置合适;最后点动I1.4和I1.5,调整甲和乙平台的位置,使搬运机械手的手指能够灵活地夹紧货物和松开货物。在夹紧货物时要特别注意要求有机械联锁装置,以免在途中突然停电货物下落而发生危险事故。
回原点操作:手动调试结束后,可以把控制面板的挡位开关扳动到回原点挡位置,I0.1应该接通,监控PLC程序,这时执行主程序、回原点子程序和挡位管理子程序,按动控制面板的回原点开始按钮I0.5,机械手自动判断当前的位置,找到最优回原点的路径。当需要暂停时,可以按动控制面板上的停止按钮,即可停止;需要继续运行,按动控制面板的回原点按钮即可。回原点的路径按照机械手当前所在位置不同有6种情况,如图7-118所示。
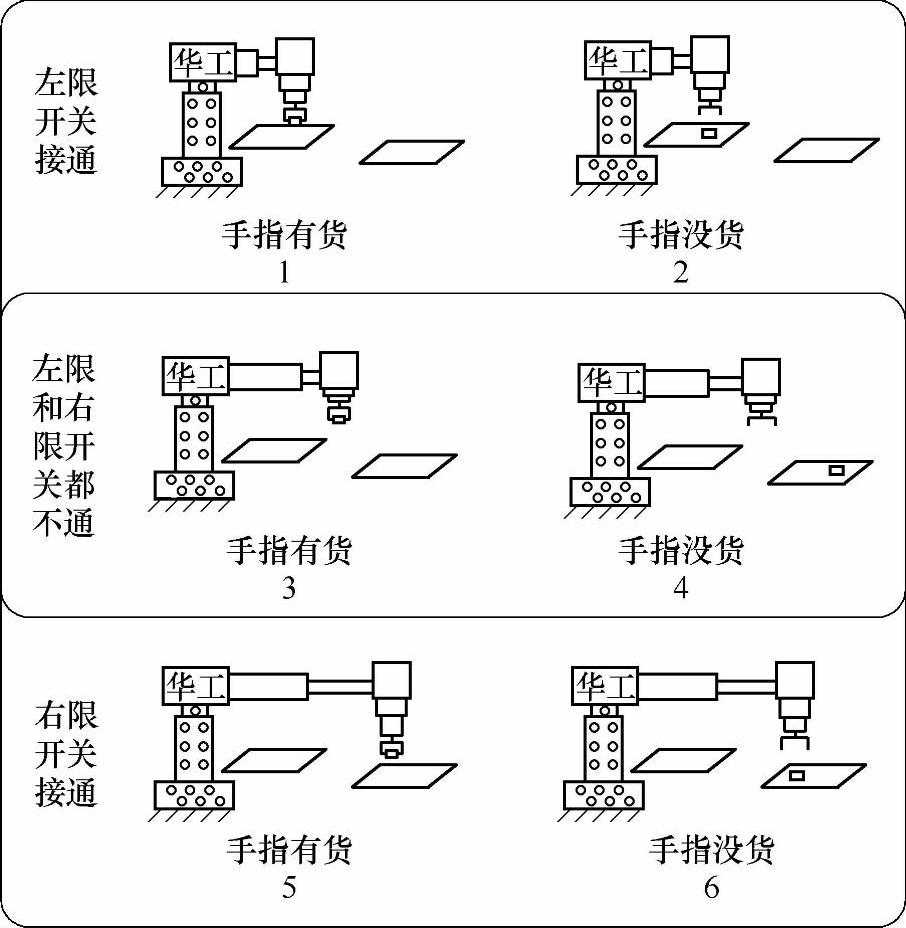
图7-118 机械手回原点操作时可能的6种位置
机械手当前位置在图7-118所示的“1”位置,当接通I0.5时,S1.4状态接通。
机械手当前位置在图7-118所示的“2”位置,当接通I0.5时,S1.5状态接通。
机械手当前位置在图7-118所示的“3”位置,当接通I0.5时,S1.0状态接通。
机械手当前位置在图7-118所示的“4”位置,当接通I0.5时,S1.2状态接通。
机械手当前位置在图7-118所示的“5”位置,当接通I0.5时,S1.6状态接通。
机械手当前位置在图7-118所示的“6”位置,当接通I0.5时,S1.1状态接通。
当机械手回到原点后,监控PLC的程序M0.6和M0.7的状态,应该是接通了。
自动操作:注意每次开机都必须在回原点操作完毕后才能进入自动操作状态。
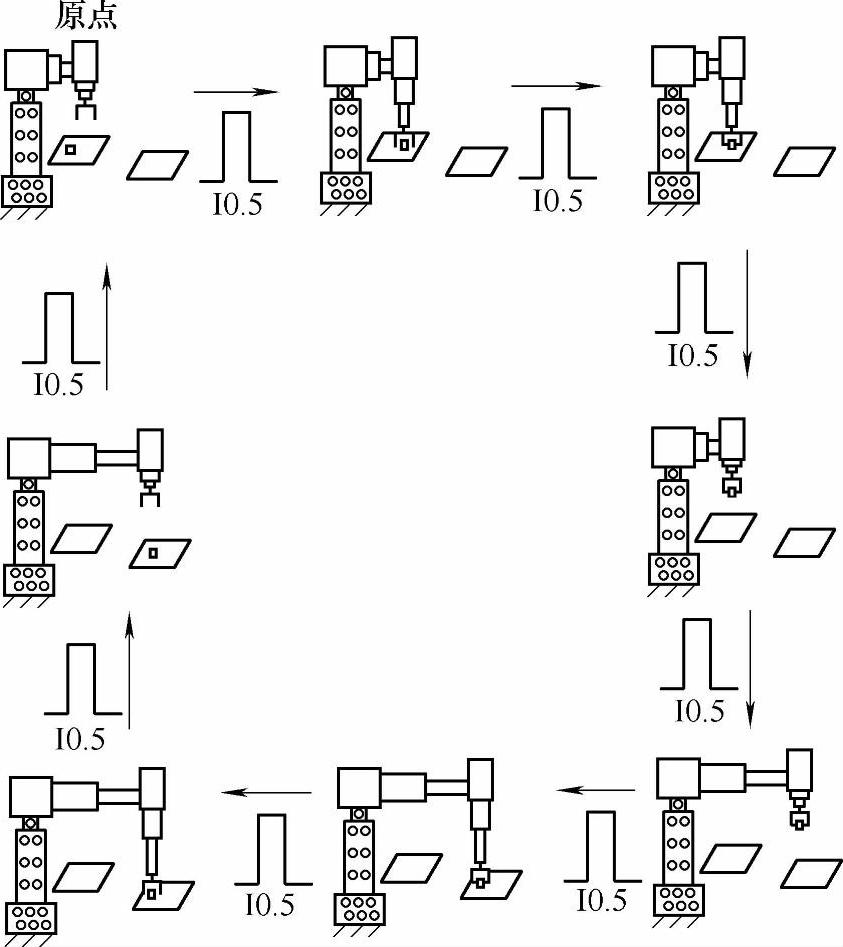
图7-119 单步操作方式动作顺序图
自动挡中又分3种操作模式:单步(如图7-119所示)、半自动(如图7-120所示)、和全自动操作(如图7-121所示)。经过回原点操作后,自动挡的3种工作模式可以随时转换。
全自动操作:回原点操作完毕后,把控制面板的挡位开关扳到全自动挡位置,I0.4应该接通,监控PLC程序,这时执行主程序、自动挡子程序和挡位管理子程序,只接通I0.6一次,M1.4和M1.5接通,机械手就周而复始地如图7-121所示动作运行,一直到接通控制面板的停止键时,机械手暂停;当需要继续运行时,按动起动键即可。
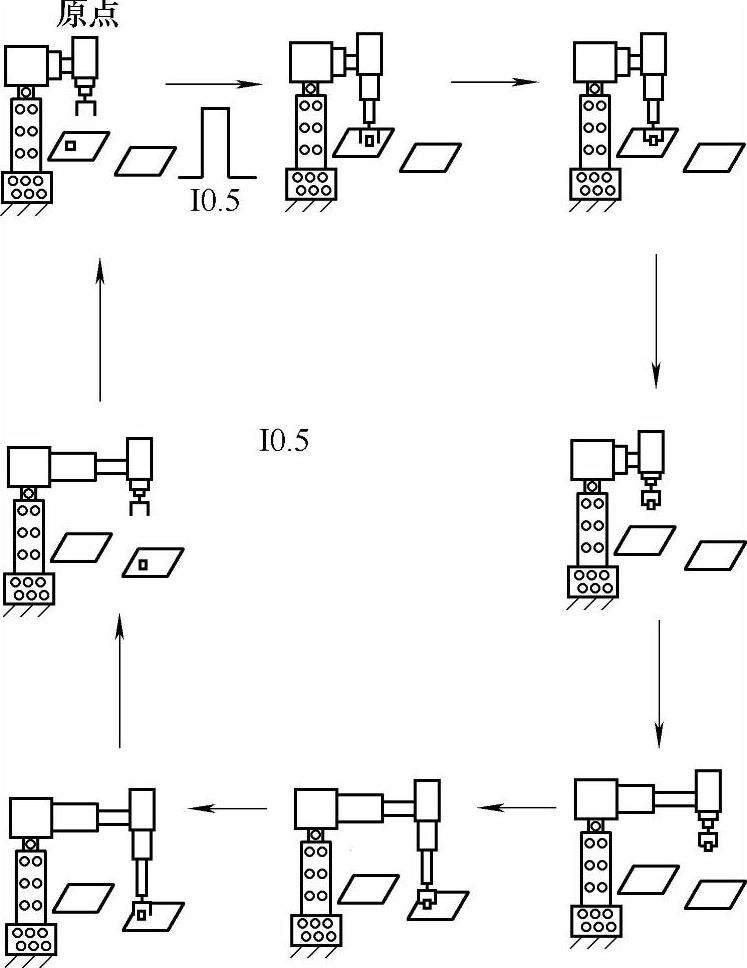
图7-120 半自动操作方式动作顺序图
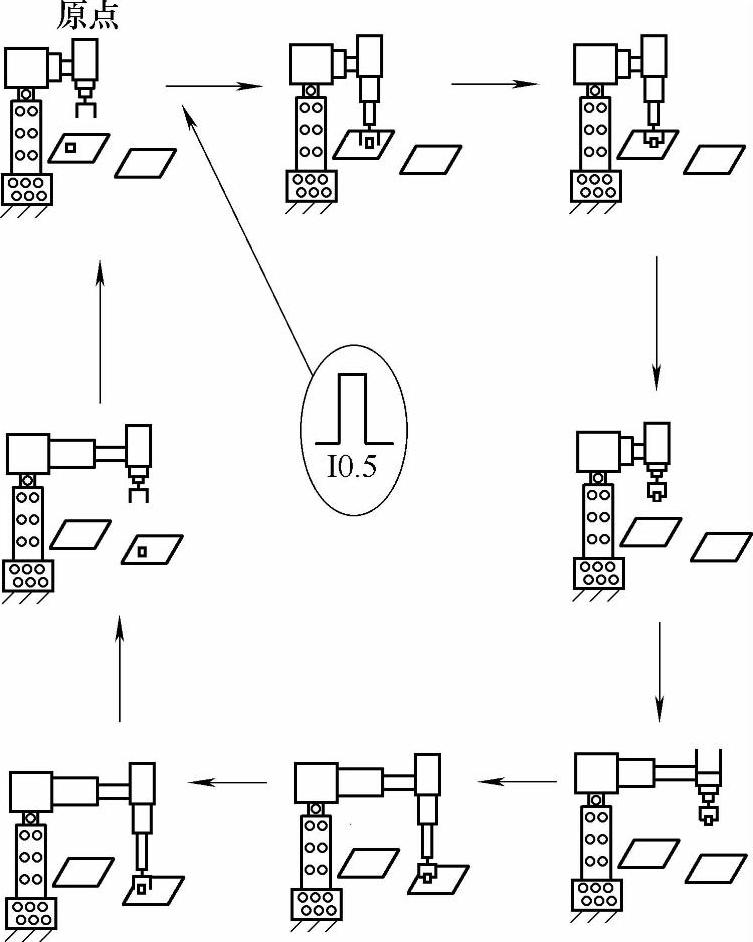
图7-121 全自动操作方式动作顺序图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。