



速度(转速)控制是任何金属切削机床主轴都需要具备的基本控制功能。除了完全采用机械变速箱进行变速的低价位普及型数控机床外,不论是模拟主轴还是串行主轴,都需要通过CNC控制主轴转速。因此,设计主轴控制PMC程序时,必须了解CNC的S代码处理流程及相关的控制信号。以FS-0iD为例,其S代码的处理流程及相关接口信号如下。
1.S代码处理流程
FS-0iD的主轴速度控制包括了S代码二进制输出、倍率调节、S模拟量或数字量输出、传动级交换、转速指令选择等功能,PMC程序设计时,需要根据CNC的处理流程,通过PMC程序的编制,向CNC发送正确的控制信号。
以模拟主轴控制为例,CNC对加工程序的S代码指令处理流程如图7-7所示,采用串行主轴控制时,无图中的D-A转换和增益/偏移调整环节。

图7-7 S代码处理流程
1)CNC读入加工程序中的S代码,将S代码(4~8位10进制数)转换为32位二进制编程转速S00~S31(F022.0~F025.7),并输出到PMC。
2)经过短暂延时,CNC向PMC发出S代码修改信号SF(F007.2),如CNC选择了M型(A、B或攻螺纹换档)传动级交换功能,CNC还将同时发送该转速所需要的传动级选择信号GR1O~GR3O(F034.0~F034.2)。PMC程序可根据实际控制需要,进行转速变换、传动级交换(换档)等处理。
3)CNC根据S代码编程转速和来自操作面板的主轴转速倍率输入信号SOV0~SOV7(G030.0~G030.7)、机床实际传动级输入信号GR1、GR2(G028.0、G028.1),计算出经倍率调节、传动级处理后的转速指令值。
4)如PMC的主轴停止输入信号∗SSTP(G029.6)为“1”(允许旋转),则向PMC输出12位指令转速R01O~R12O和输出内部转速给定信号;如主轴停止信号为“0”,则封锁指令转速输出和转速给定(输出为0)。PMC编程时需要注意的是,CNC执行主轴停止指令M05时,一般不直接撤销或封锁指令转速输出,因此,需要通过PMC程序对M05的处理,利用主轴驱动器控制主轴停止,或通过PMC程序向CNC发送∗SSTP信号,停止主轴。如CNC选择了多主轴控制功能,则第1~3主轴可使用独立的主轴停止信号∗SSTP1~∗SSTP3(G027.3~G027.5),∗SSTP1~∗SSTP3仅对多主轴控制有效。
5)执行3)、4)时,如来自PMC的主轴定向准停信号SOR(G029.5)为“1”,且∗SSTP(G029.6)为“0”,则指令转速输出无效,CNC将自动选择参数设定的主轴定向准停转速和转向进行输出。
6)CNC向PMC发送经以上倍率、传动级、定向准停等处理后的12位二进制转速给定信号R01O~R12O(F036.0~F037.3)。
7)如需要,PMC程序可将来自CNC的12位二进制转速给定值R01O~R12O进行变换或其他处理,并将处理后的转速给定值以12位二进制的形式,通过PMC→CNC的信号R01I~R12I(G032.0~G033.3)回送到CNC。同时,利用PMC的转速给定选择信号SIND(G033.7),选择CNC转速给定(G033.7=0)或PMC的转速信号R01I~R12I(G033.7=1),作为CNC的转速指令输出。(https://www.xing528.com)
8)CNC根据PMC输出的转向选择信号SSIN(G033.6),设定转速指令输出的极性,如SSIN(G033.6)=“0”,转速给定的极性决定于加工程序中的M03/M04状态;如SSIN(G033.6)=“1”,则需要PMC程序向CNC发送转向信号SGN(G033.5)。
9)对于主轴模拟量输出,CNC还可根据参数设定,进行漂移、增益的调整,然后通过D-A转换,输出DC-10~10V模拟量;对于串行主轴控制,则直接输出数字转速给定。
2.基本接口信号
FS-0iD与主轴速度控制相关的主要PMC接口信号如表7-2所示(不包括主轴位置控制信号),表中的信号对主轴模拟量输出和串行主轴控制均有效。
表7-2 主轴基本控制信号表

3.串行主轴控制信号
当CNC使用串行主轴控制功能时,PMC与主轴驱动器间可以直接通过总线传输控制信号,并可使用多主轴控制功能,以双主轴控制为例,PMC常用的主轴速度控制与状态检测信号如表7-3所示(不包括主轴位置控制信号)。
表7-3 串行主轴转速控制PMC信号表
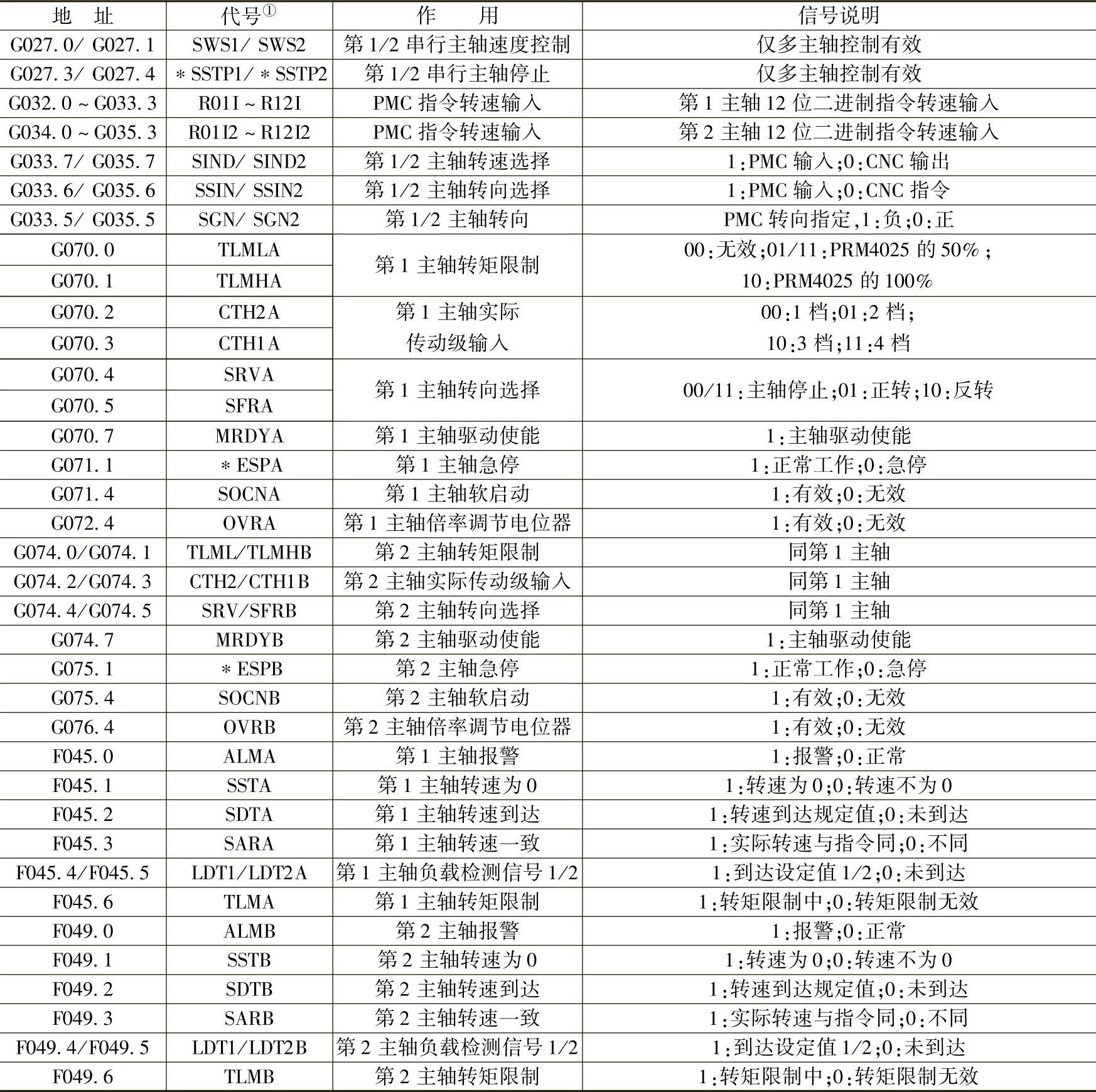
①代号后缀“1”或“A”,为第1主轴信号;后缀“2”或“B”,为第2主轴信号。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。