



高速液压刀架的换刀控制程序与通用液压刀架类似,PMC程序需要有刀号出错检查、刀号一致判别、捷径选择、刀架回转控制、完成应答等部分,但是,刀架回转分度控制需要有粗定位插销动作。用于高速液压刀架控制的典型PMC程序如下。
1.刀号出错检查与一致判别
高速液压刀架的刀号出错检查、刀号一致判别程序与电动刀架、通用液压刀架基本相同,有关内容可参见5.2节、5.3节。图5-16所示的程序可用于12刀位刀架的控制。
1)刀号出错检查。图5-16的PMC程序同样利用了2条4字节二进制数据比较的功能指令COMPB(SUB32),将CNC输出的T代码与常数0和12进行了比较,如CNC加工程序中的编程刀号T=0,则刀号编程出错信号R500.0=1;如T﹥12,则刀号编程出错信号R500.1=1。刀号编程出错时,一方面可通过机床报警处理的PMC程序,产生机床报警或操作者出错信息;另一方面,可通过后述的T代码应答程序,直接输出辅助功能执行完成信号FIN(G004.3)、结束T指令。
2)刀号一致判别。如CNC编程刀号正确,程序中的R500.2=1,这时,可通过1字节“位与”指令MOVE(SUB8)读取实际刀号的输入信号X4.0~X4.3,并将其保存到R510中。由于机床的实际刀号为二进制编码输入且最大刀号小于255,因此,只需要通过1字节二进制数据比较指令COMPB(SUB32),进行R510和T代码输出最低字节F026的比较。
如换刀开始时实际刀号已和CNC编程的T代码一致(R501.0=1),则可通过换刀启动脉冲R501.1使R500.3=1,PMC将直接输出辅助功能执行完成信号FIN(G004.3)、结束T指令;如刀号不一致,则R501.3=1,启动换刀。
实际刀号读取和刀号比较指令在整个换刀过程中始终有效,因此,当换刀起动后,如果刀塔回转到T代码指定的刀位,同样可输出刀号一致信号R501.0;但由于R500.3仅在换刀启动脉冲R501.1出现时才能置“1”,因此,在换刀过程中所出现的刀号一致,不会产生R500.3,使得换刀过程提前结束。
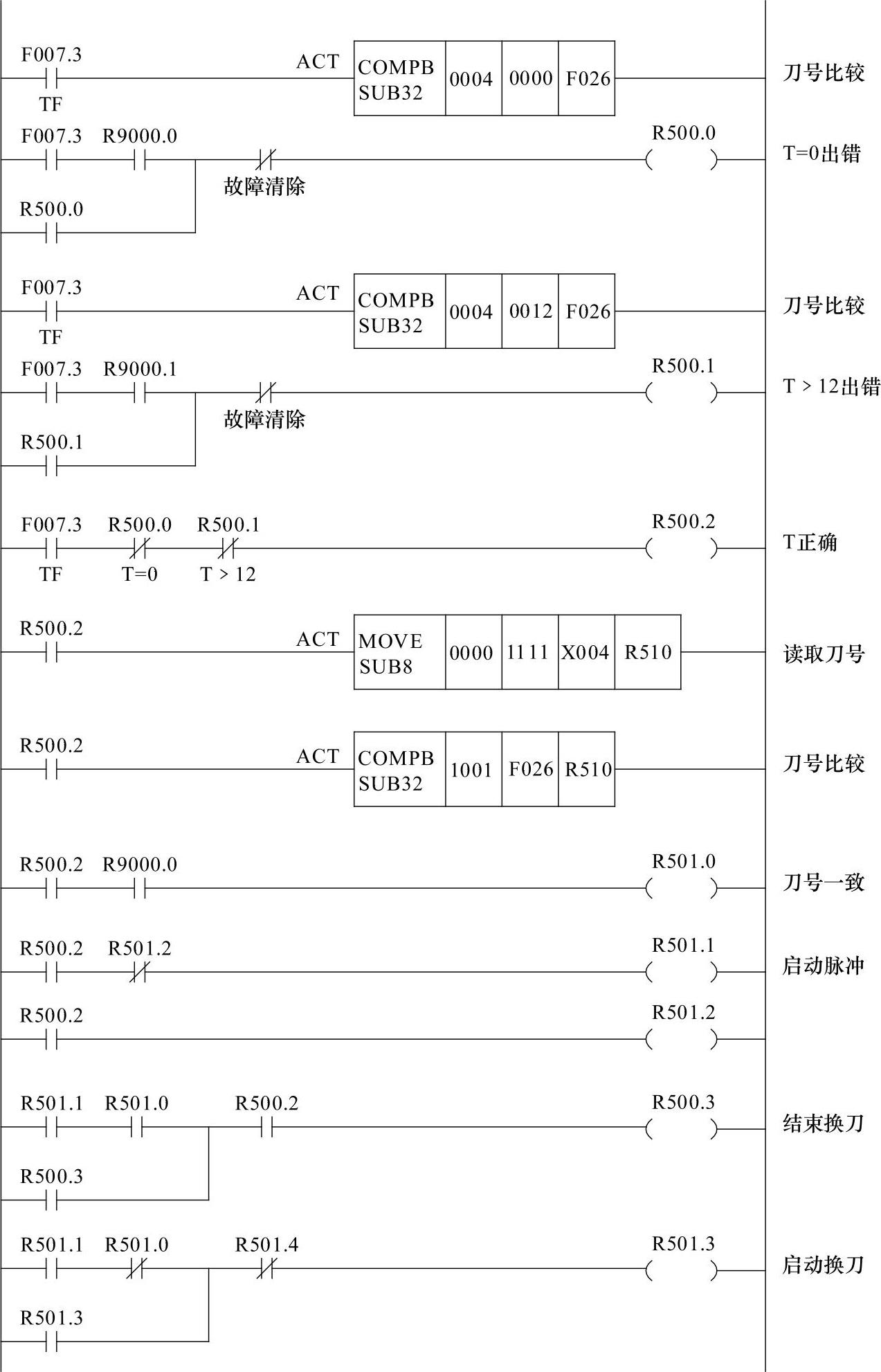
图5-16 刀号出错和一致判别程序
2.捷径选择和减速判别
高速液压刀架的刀塔需要双向回转、提前减速和插销粗定位,因此,换刀时需要有判别刀塔转向的捷径选择和提前减速的判别程序,以生成刀塔回转的转向和提前减速信号。
为了简化刀架的结构,高速液压刀架的提前减速一般在刀塔到达T代码指令的前一位置时进行,因此,FS-0iD等CNC的捷径选择和提前减速判别,可直接通过PMC的二进制回转控制功能指令ROTB(SUB26)实现。以上述12刀位高速液压刀架为例,其典型的PMC程序如图5-17所示。
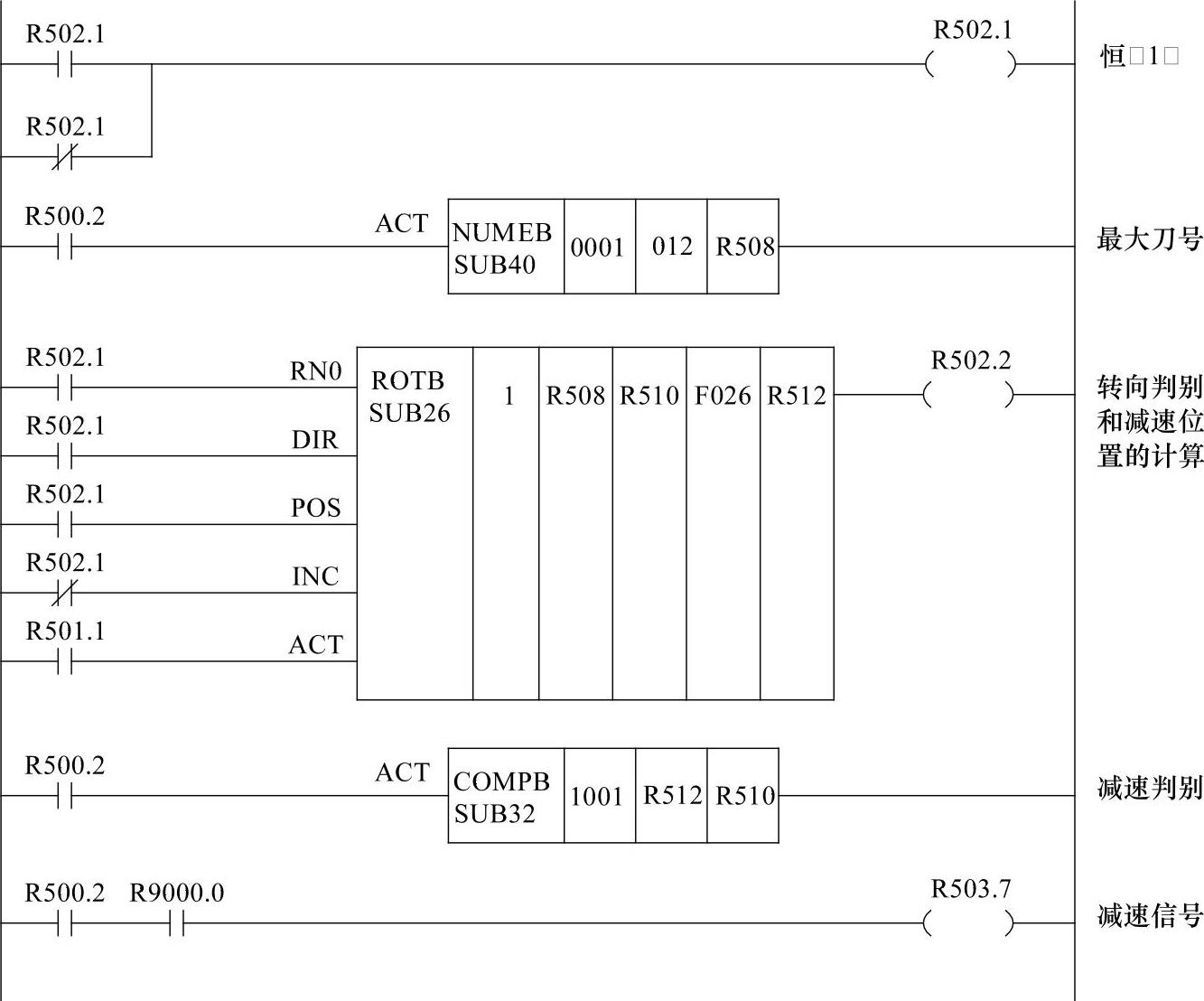
图5-17 捷径选择和减速判别程序
二进制回转控制功能指令ROTB(SUB26)需要通过存储器地址来指定回转体的最大分度数,因此,对于使用二进制编码开关作为刀位检测的机床,需要在执行ROTB指令前,通过1字节二进制数据传送指令NUMEB(SUB40),将最大刀位数12(十进制常数)转换为二进制格式、保存到R508中,作为ROTB指令的回转体分度数输入。
程序中的二进制回转控制指令ROTB(SUB26)具有捷径选择和减速位置计算两方面的作用,指令只需要在换刀开始的瞬间,利用TF信号R500.2的上升沿R501.1执行一次。
ROTB指令中的控制条件和参数定义如下。
RN0=1:回转计数的初始值(刀塔的最小刀号)为“1”。
DIR=1:捷径选择功能有效。转向信号可通过结果寄存器R502.0输出,R502.2=0为正转,R502.2=1为反转。
POS=1:以目标位置(T代码指令位置)的前一位置为基准,计算并在结果存储器R512上输出刀塔需要回转的刀位数或刀塔的定位目标位置。(https://www.xing528.com)
INC=0:结果存储器R512上的输出为前一位置的刀位分度值(刀号)。
ACT:指令执行启动信号,利用换刀启动脉冲R501.1启动指令;在换刀启动后,将不再执行ROTB指令。
ROTB指令中的参数定义如下。
1:指令数据的长度为1字节。由于机床的实际有效刀号为T1~T12,故只需要进行实际刀号、指令刀号的最低字节运算。
R508:回转体的最大分度位置值(最大刀号),R508的数值由前述的指令NUMEB(SUB40)定义。
R510:回转体的当前位置(当前刀号)。R510的数值来自前述刀号出错和一致判别程序中的指令MOVE(SUB8),它是实际刀号检测输入X4.0~X4.3的二进制编码信号。
F026:回转的目标位置。它就是CNC输出的T代码指定位置。
R512:结果存储器。控制条件POS=1、INC=0时,其输出为T代码指令位置前一位置的分度位置值(刀号)。
R502.2:转向输出。刀塔的捷径回转的转向,R502.2=0为正转,R502.2=1为反转。
程序中的1字节二进制数据比较指令COMPB(SUB32)用于实际刀号输入R510和提前减速的分度位置值R512间的比较,如两者相等,则R503.7=1,刀塔的回转将由快速变为慢速。COMPB指令在整个换刀过程中始终有效,只要刀塔回转到达减速的刀位,R503.7便可输出“1”。
3.回转控制和完成应答
刀架回转和完成应答程序如图5-18所示。当换刀启动信号R501.3为“1”时,如刀塔处于落下夹紧(X4.4=1)、拔销(X4.6=0)的初始位置,且启动条件满足,刀塔抬起电磁阀Y0.0将被接通并自锁,刀塔抬起、松开。
刀塔抬起后,松开检测开关X4.5将为“1”,信号经过延时(通常为0.2s左右),信号R501.4将为“1”,它一方面可产生回转脉冲R503.0,启动刀塔正转(Y0.1=1)或反转(Y0.2=1);同时又可复位起动信号R501.3。
当刀塔回转到达减速刀位,前述的减速判别指令将输出减速信号R503.7=1,刀塔减速电磁阀Y0.2接通并保持,刀架慢速回转。当刀塔慢速回转0.5s左右(时间可调整),将接近目标刀位,这时,如目标刀位到达,刀号一致判别信号R501.0将为“1”,粗定位插销电磁阀Y0.4接通,插销将在弹簧力的作用下伸出并插入到刀塔定位槽内,刀塔回转将禁止。
插销插入后,检测信号X4.6将为“1”,刀塔落下、夹紧信号R503.2=1。R503.2=1后,刀架抬起电磁阀Y0.0、正反转电磁阀Y0.1或Y0.2、减速电磁阀Y0.3的输出将被撤销,但插销电磁阀Y0.4的输出保持,刀塔在粗定位状态下落下、夹紧。夹紧到位后,检测信号X4.4为“1”,此信号经夹紧延时后便可使R501.6、R501.7为“1”,PMC输出辅助功能执行完成信号FIN(G004.3)。
CNC接收到PMC的FIN信号后,将自动撤销TF输出F007.3,使R500.2=0。R500.2为0时,将撤销插销电磁阀Y0.4的输出和落下夹紧信号R503.2,并通过R503.2=0使得R501.6、R501.7及FIN(G004.3)为“0”,结束换刀过程。
图5-18中的换刀完成应答程序的设计和电动刀架、通用液压刀架一致,有关内容可参见5.2节、5.3节。程序在编程刀号出错(R500.0或R500.1为1),或实际刀号和程序刀号一致(R500.3为1)时,PMC将直接输出R501.7和FIN(G004.3)信号,立即结束T代码执行。在其他情况下,则在换刀完成、刀塔夹紧后,通过R501.6结束T代码。
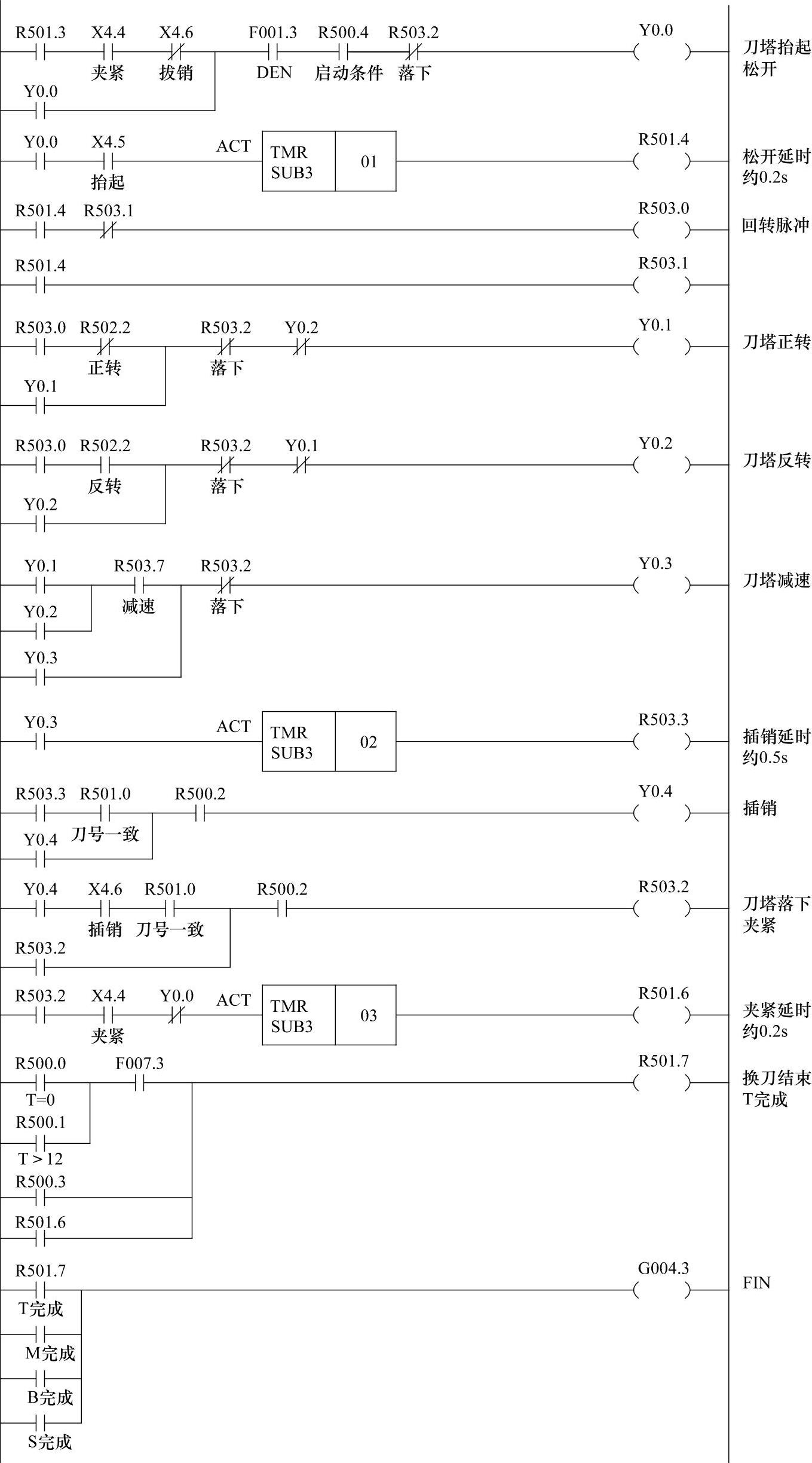
图5-18 换刀控制和结束应答程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。