



(1)控制要求
图4.4-19所示为传送带大、小球分拣系统的示意图。其主要功能是将大球放在大球容器中,小球放在小球容器中,其动作顺序为下降、吸球、上升、右行、下降、释放球、上升、左行。
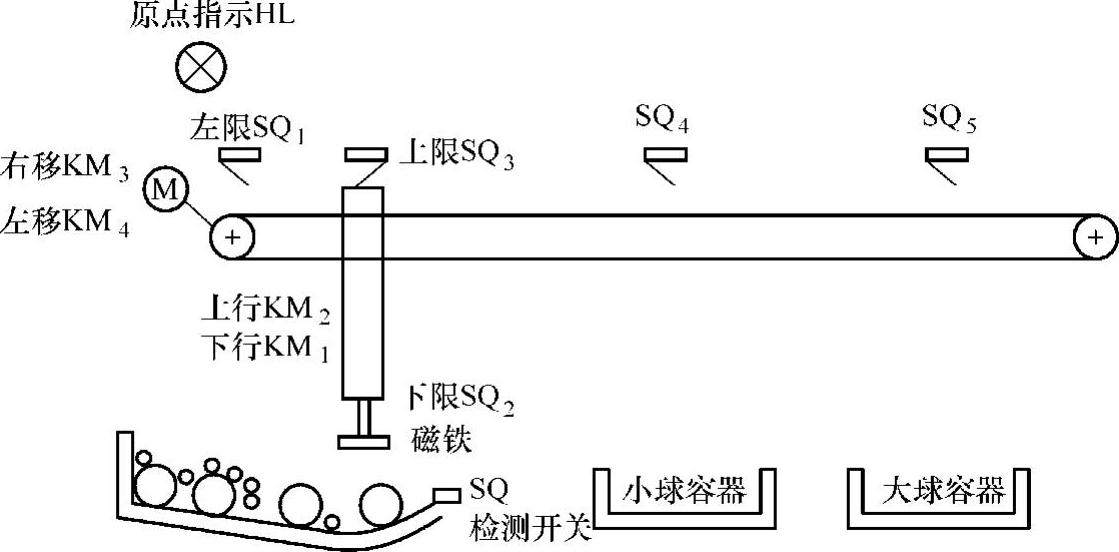
图4.4-19 大小球分拣装置示意图
为保证安全操作,要求机械臂必须在原点状态,即初始位置时(左移到左限位SQ1、上升到上限位压着SQ3、磁铁在松开状态)才能起动运行。若不在原点,则通过手动控制使机械臂到达初始位置。要求在每次起动运行后,在完成一个工作周期后机械臂回到原点并停止。
当机械臂处于原始位置时,上限位开关SQ3和左限位开关SQ1被压下,抓球电磁铁处于失电状态,这时按下起动按钮后,机械臂下行,当碰到下限位开关SQ2后停止下行,且电磁铁得电吸球。如果吸住的是小球,则大小球检测开关SQ为ON;如果吸住的是大球,则SQ为OFF。1s后,机械臂上行,碰到上限位开关SQ3后右行,它会根据大小球的不同,分别在SQ4(小球)和SQ5(大球)处停止右行,然后下行至下限位停止,电磁铁失电,机械臂把球放在小球或大球容器里,1s后返回。如果不按停止按钮,则机械臂一直工作下去;如果按下停止按钮,则不管何时何处按,机械臂最终都要停止在原始位置。再次按下起动按钮后,系统可以再次从头开始循环工作。
(2)PLC的I/O配置(见表4.4-6)及PLC的I/O接线(见图4.4-20)
表4.4-6 大小球分拣PLC的控制的I/O配置
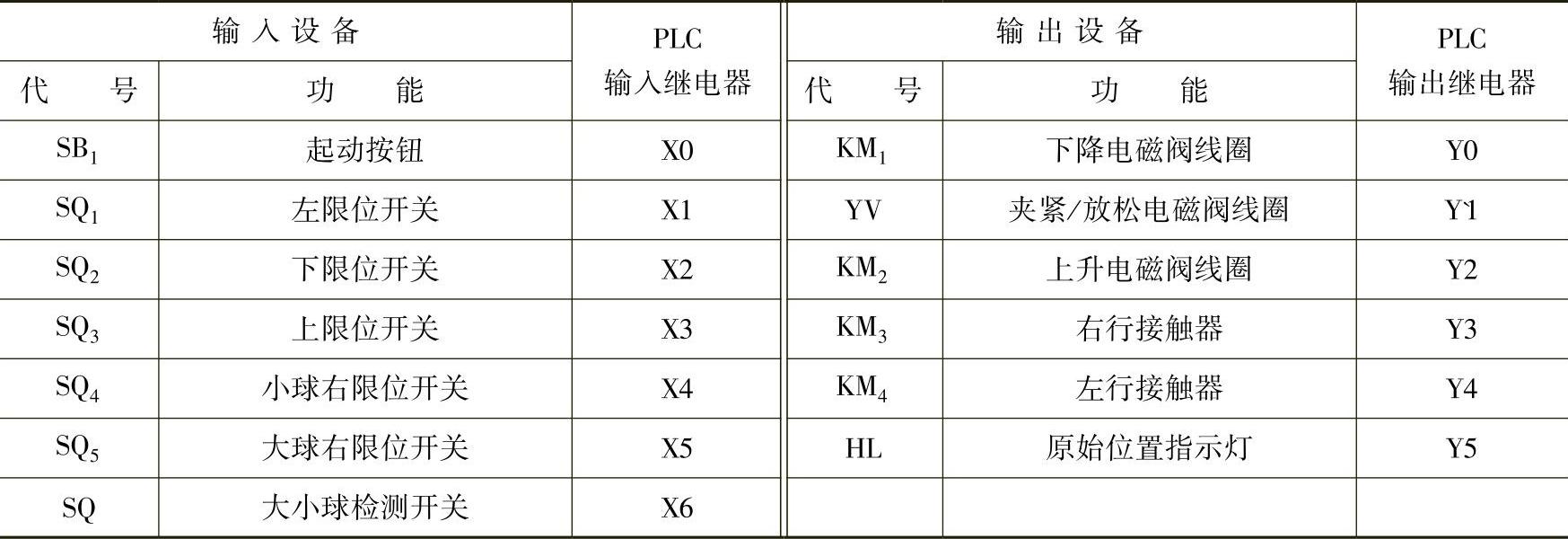
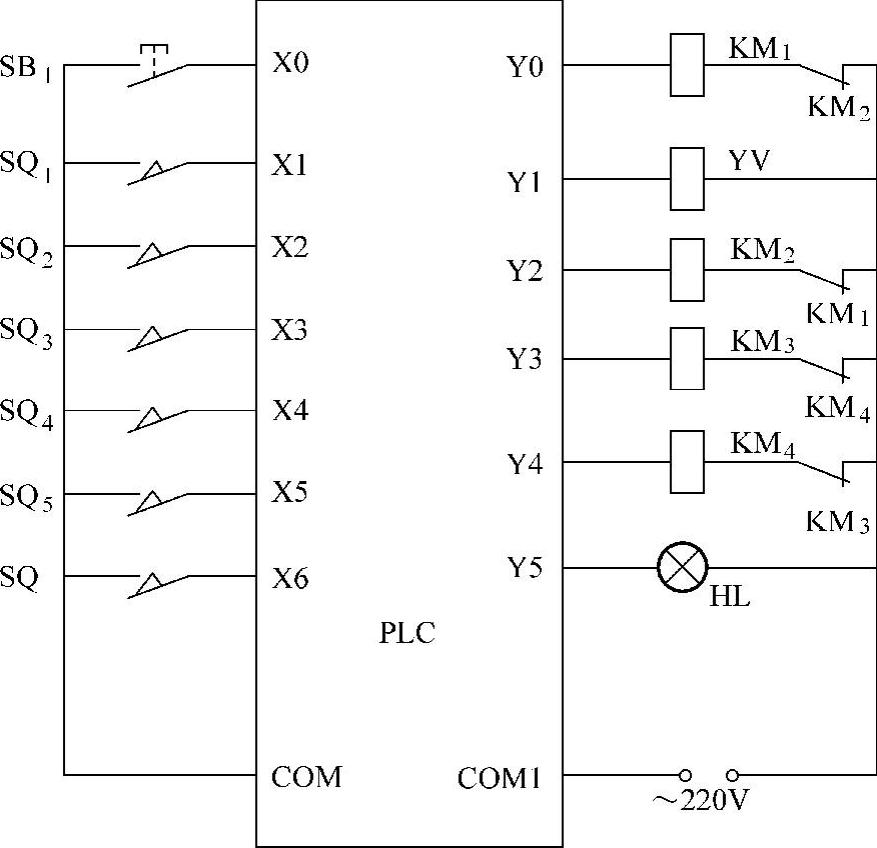
图4.4-20 PLC的I/O接线
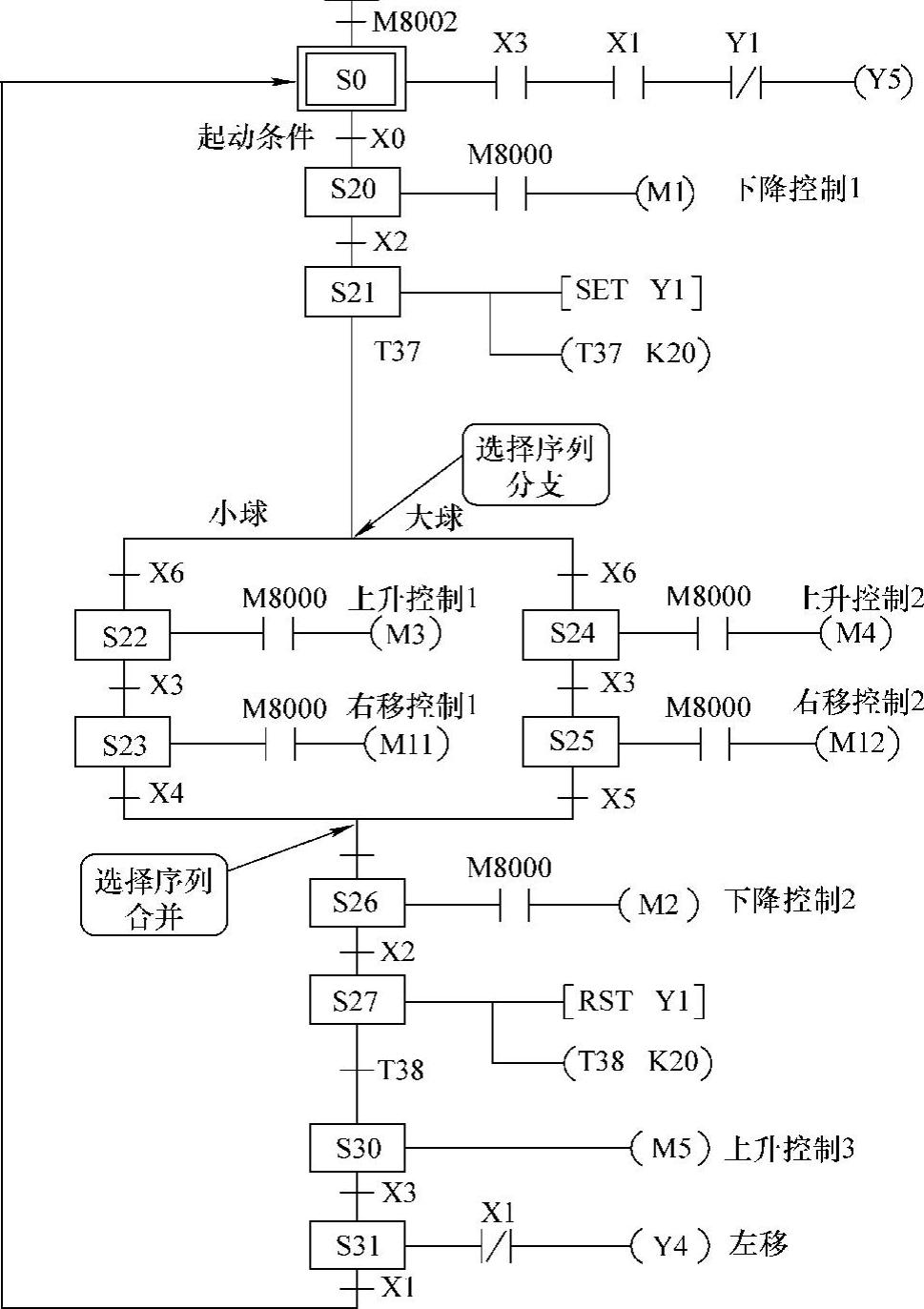
(3)顺序功能图
1)任务分解。根据控制要求,该系统可根据下限位行程开关SQ2的状态(即判断大、小工件,若碰到的是大球时,操作杆活塞未达到下限,SQ2不动作仍为断开状态;若碰到的是小球时,操作杆活塞未达到下限,SQ2动作为闭合状态)有两个分支,且为选择序列分支。分支在操作杆下降之后根据下限位行程开关SQ2的判断,分别将大或小球吸住、上升、右移到大或小球右限位处,大或小球右限位开关SQ5、SQ4动作,使操作杆下降,此处为合并处,然后再释放、上升、左移到原点。
2)各步的功能、代表步的继电器、驱动负载、转移条件和转移目标,见表4.4-7。
表4.4-7 各步的功能、代表步的继电器、驱动负载、转移条件和转移目标
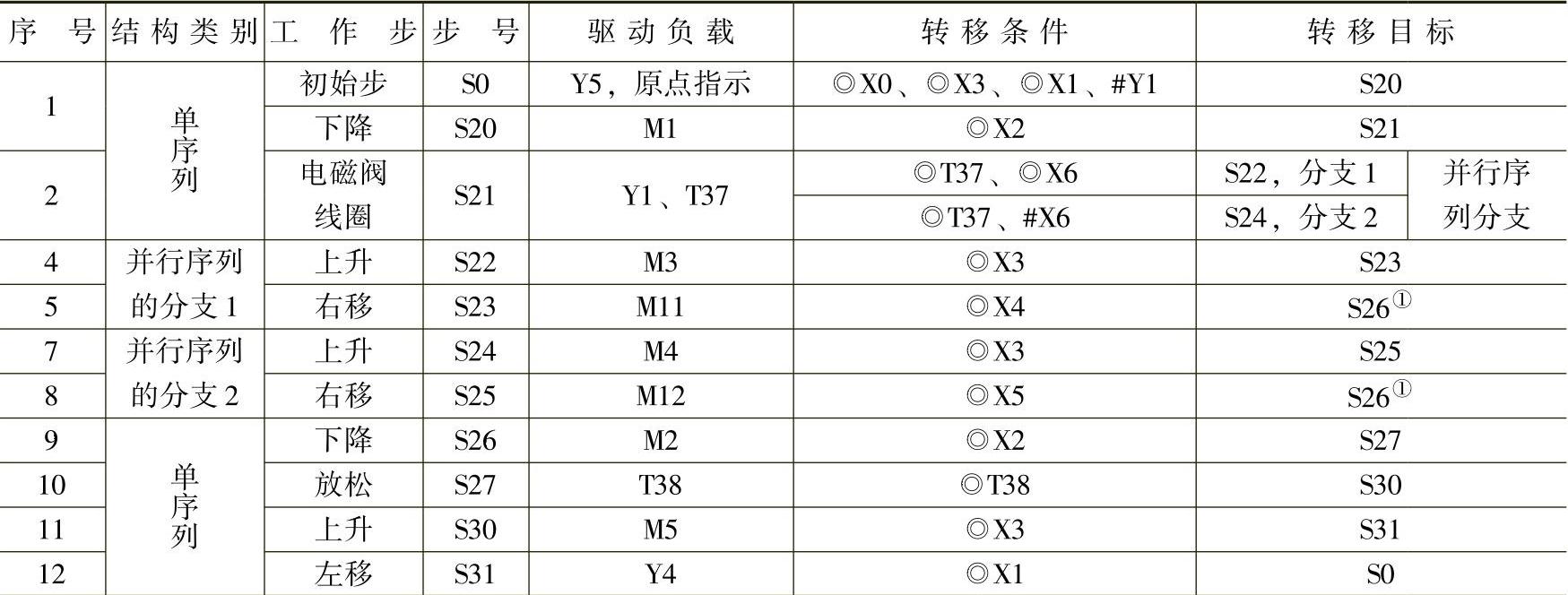
①并行序列的分支1和分支2在步S26进行并行序列的分支合并。
3)设计顺序功能图
根据表4.4-7,可设计出如图4.4-21所示的顺序功能图。
 (https://www.xing528.com)
(https://www.xing528.com)
图4.4-21 大小工件分拣装置的顺序功能图
(4)设计梯形图
根据表4.4-7和图4.4-21可设计出如图4.4-22所示的梯形图。
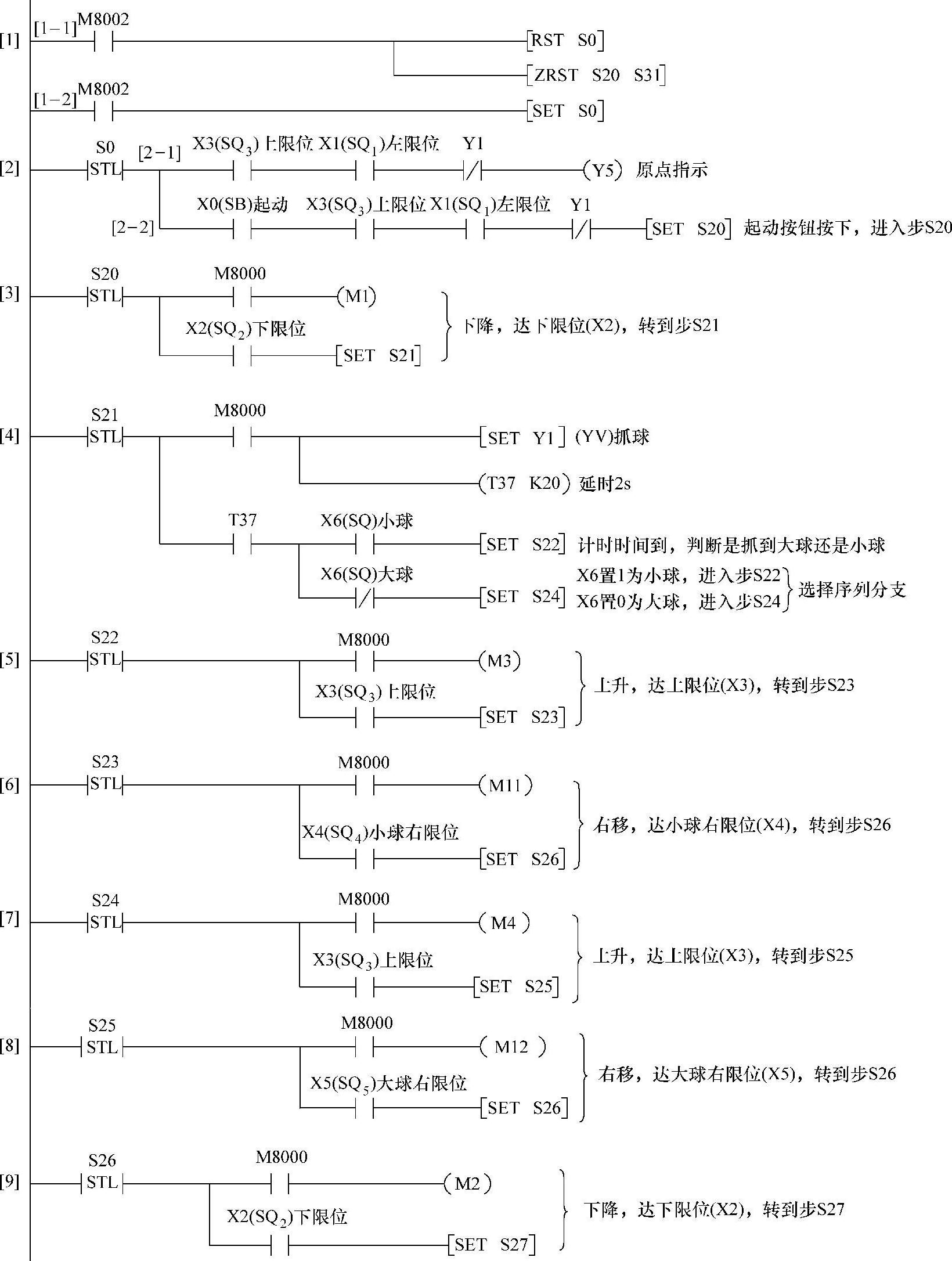
图4.4-22 大小球分拣装置的梯形图
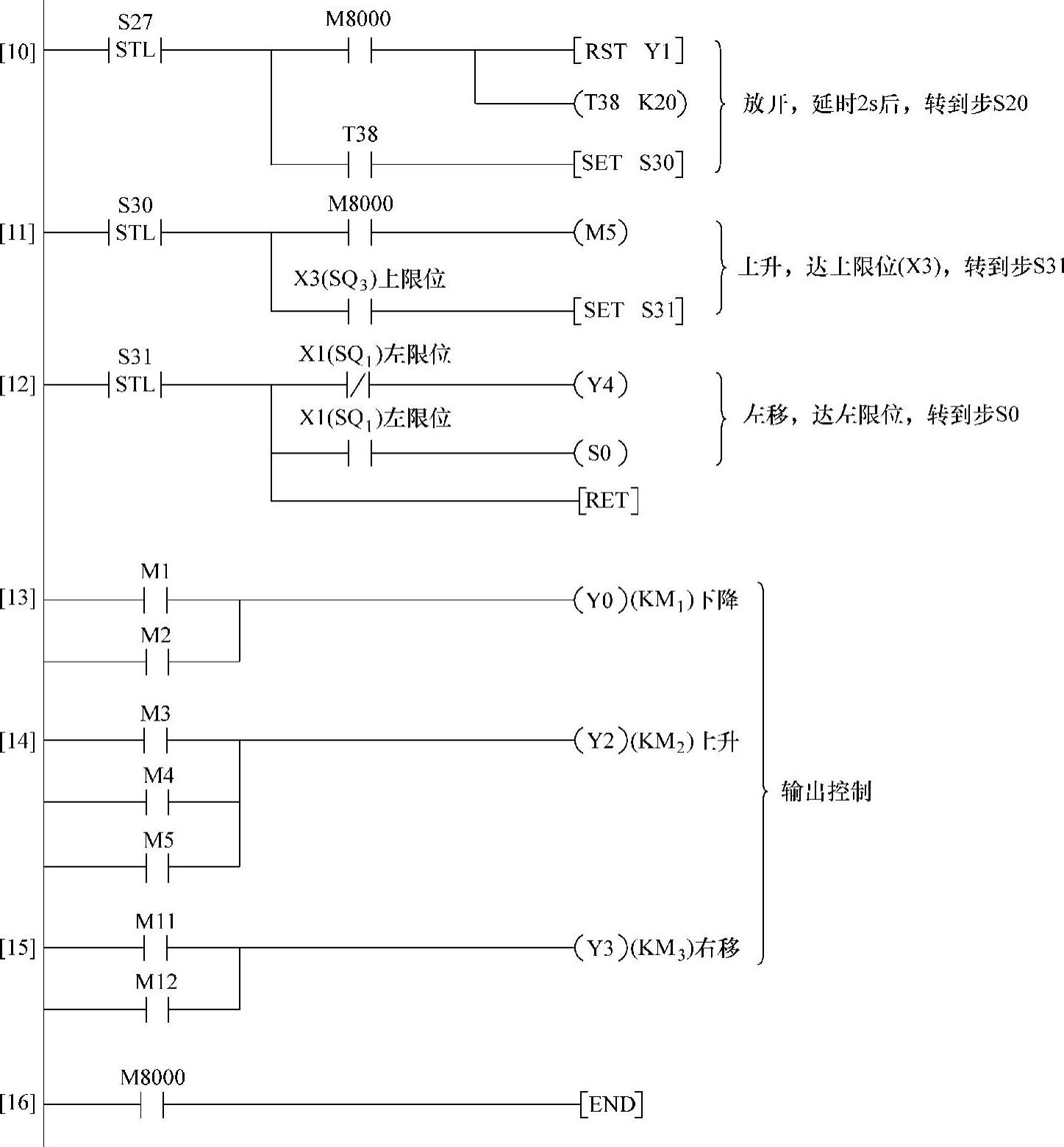
图4.4-22 大小球分拣装置的梯形图(续)
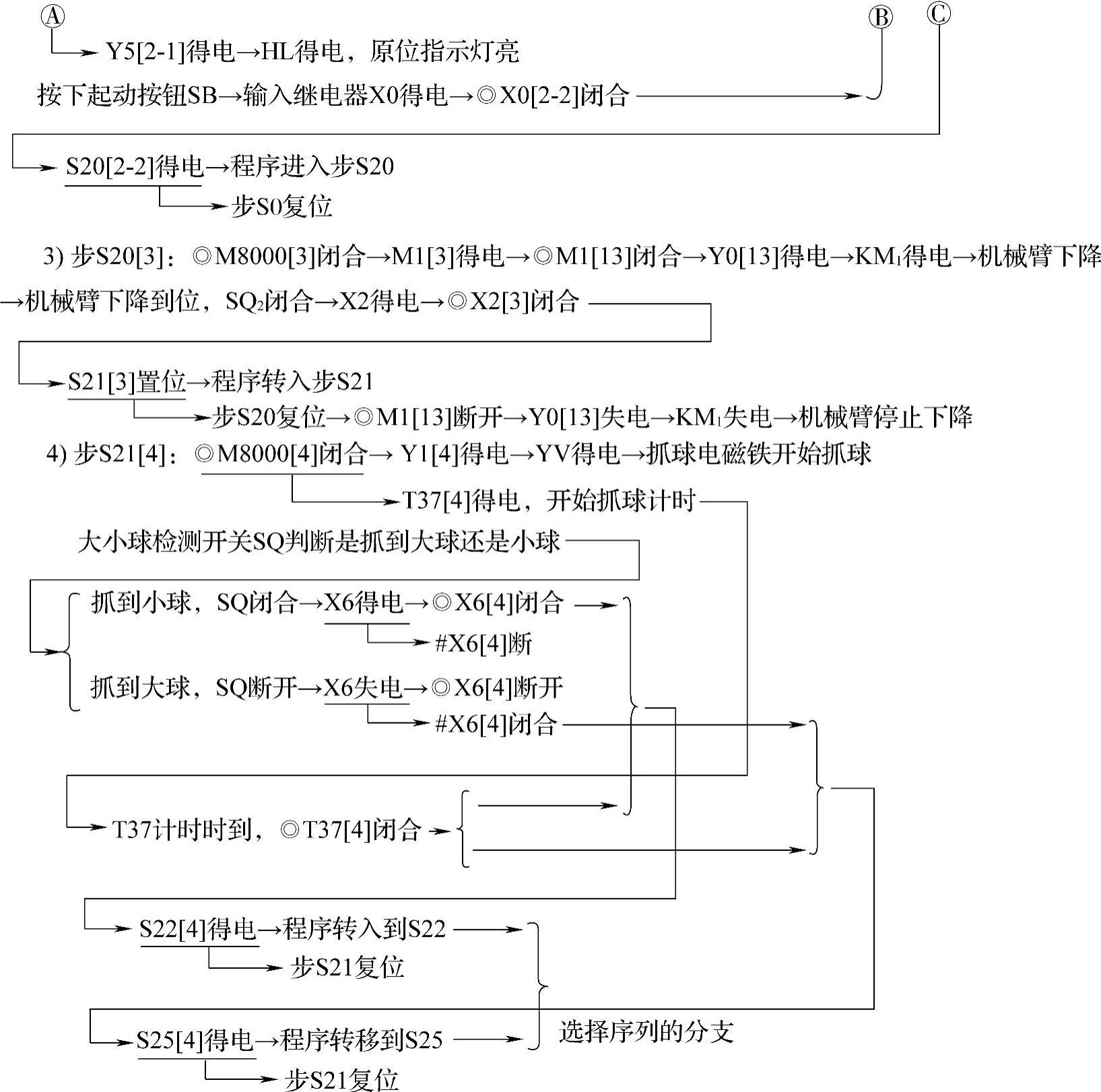
(5)电路工作过程
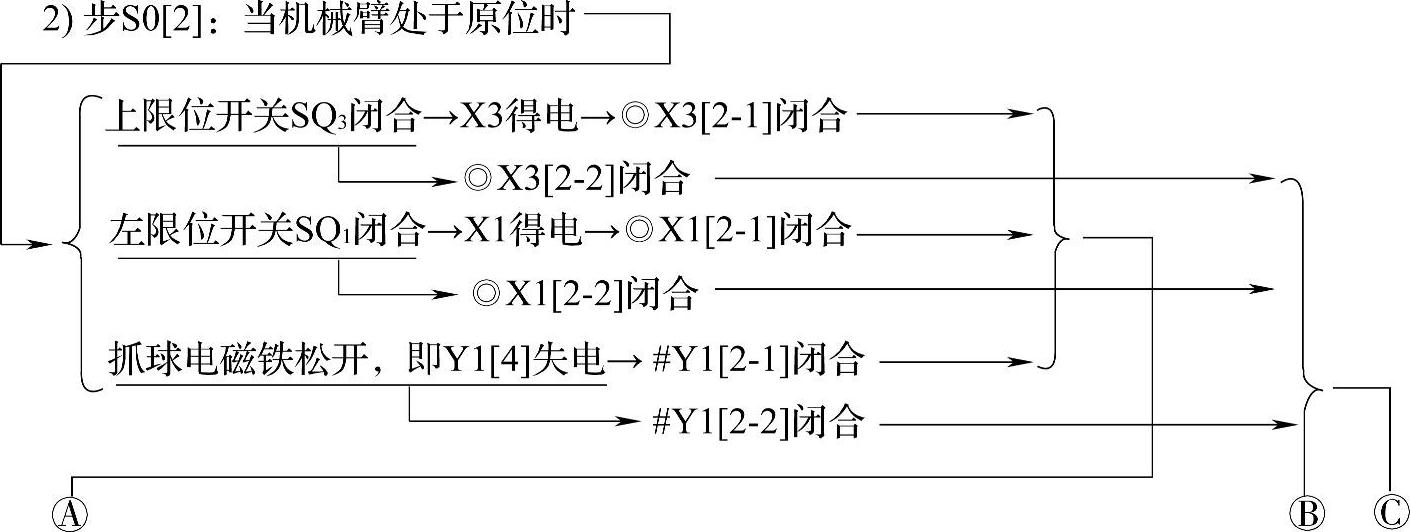
1)初始状态:
◎M8002[1-1]闭合→S0[1]清0、S20~S31[1]清零
◎M8002[1-2]闭合→S0[1]置位并保持→进入步S0
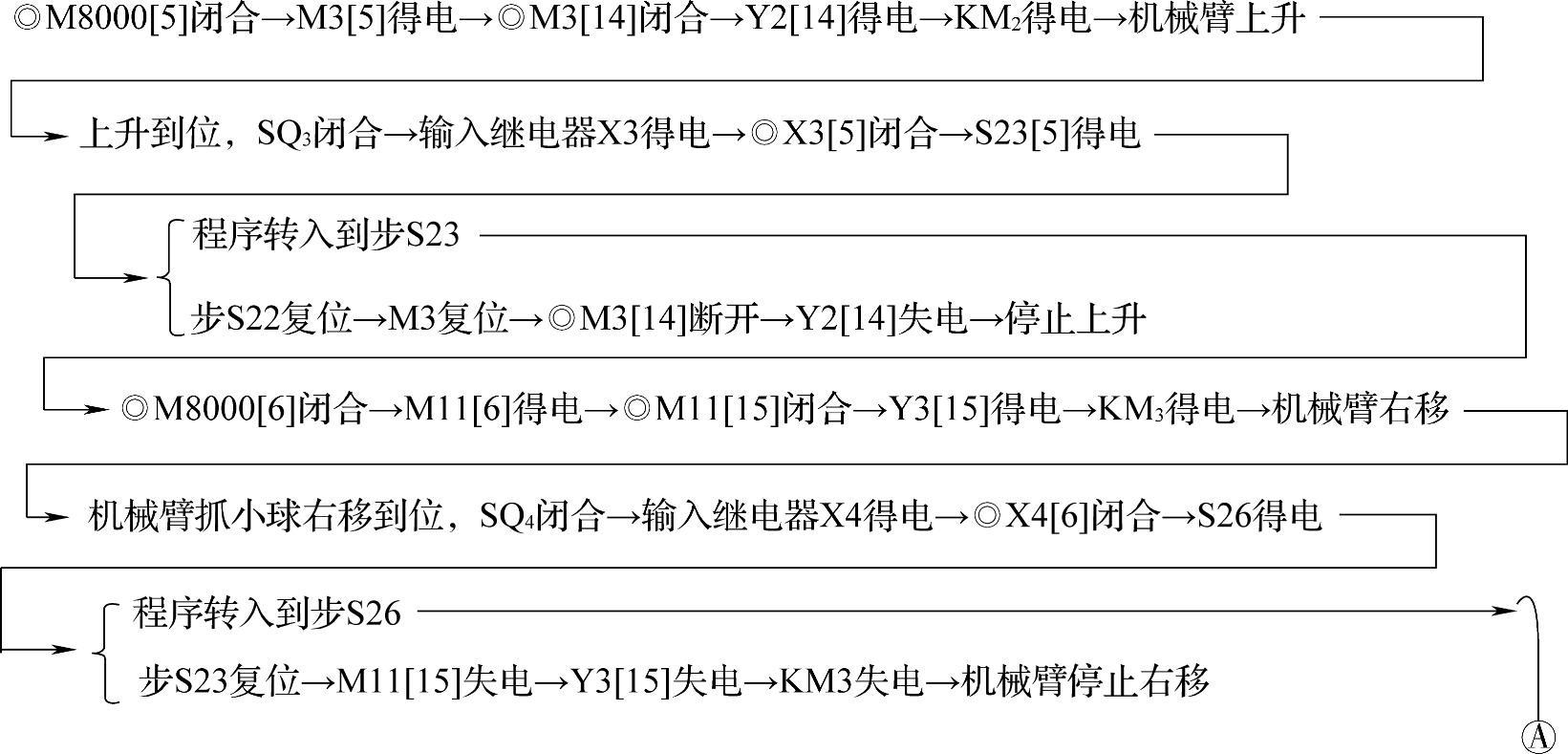
5)步S22~步S23[5~6],选择性分支的分支Ⅰ:
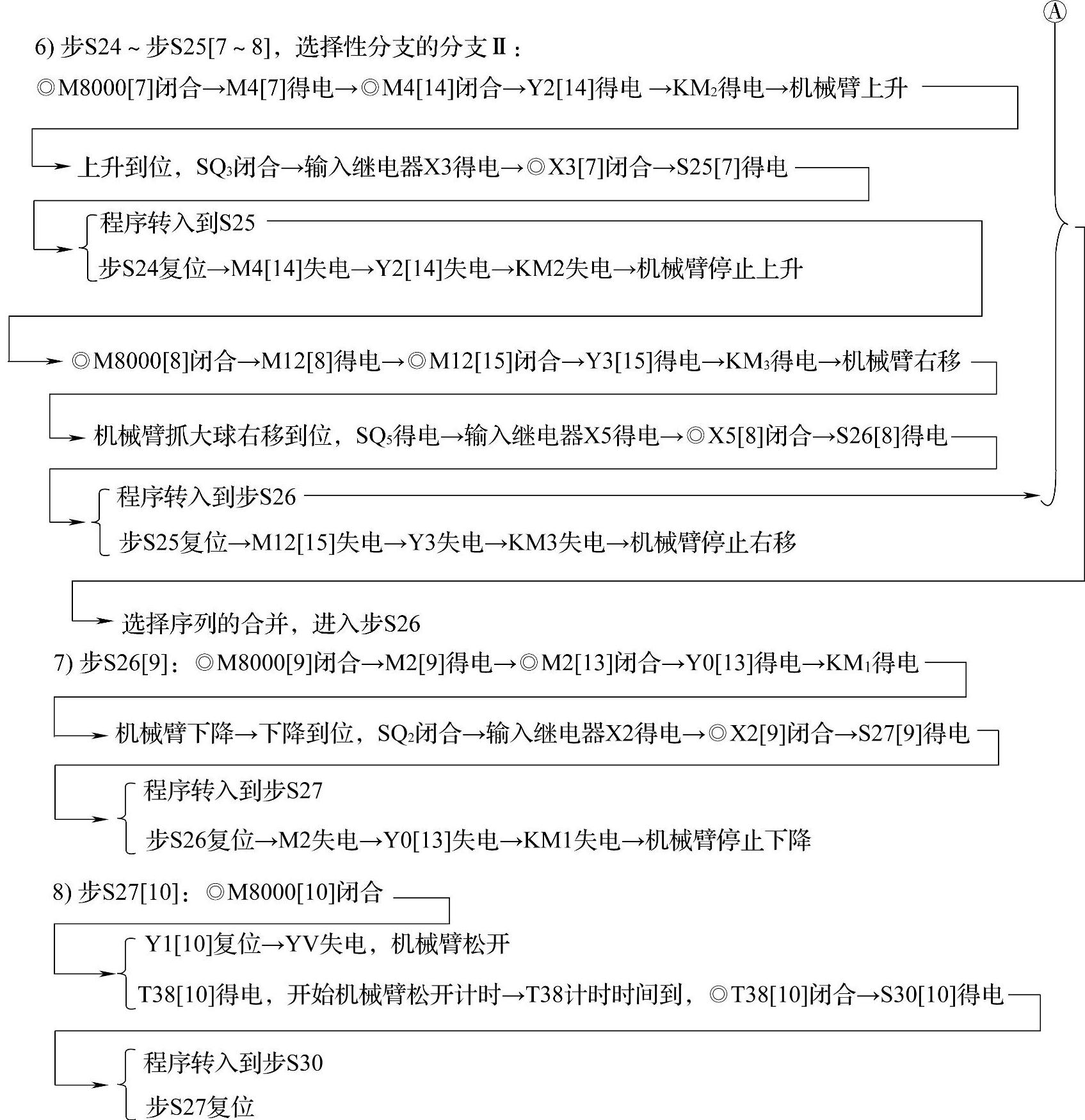
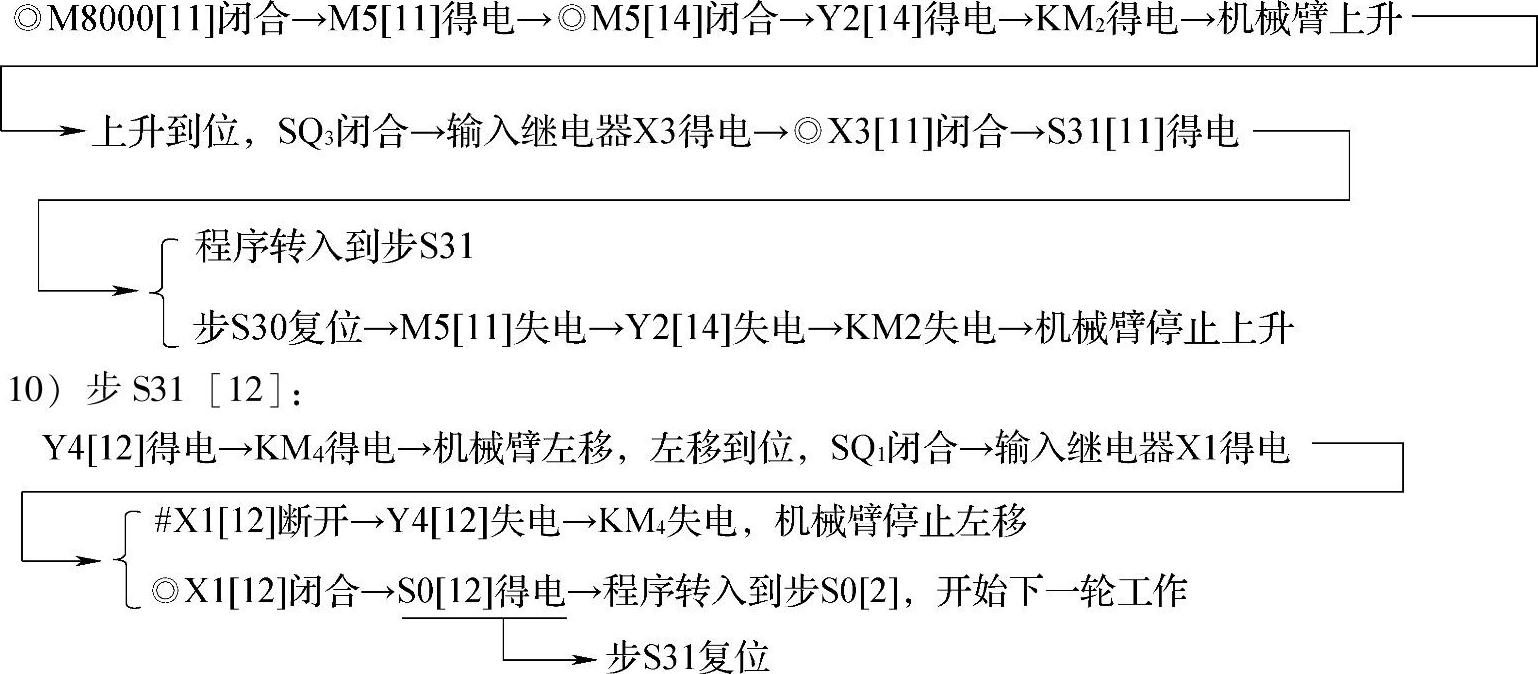
9)步S30[11]:
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。