



(1)控制要求
同【例4.2-4】。
(2)PLC的I/O配置及PLC的I/O接线
同【例4.2-4】。
(3)设计顺序功能图
由图4.2-20所示的自动门控制系统的时序图可看出,自动门在关门时会有两种选择,关门期间无人要求进出时继续关门,而如果关门期间又有人要求进出的话,则停止关门,开门让人进出后再关门。
根据控制要求可得如图4.4-16所示自动门控制系统的工作流程图,根据流程图来设计顺序功能图。
1)划分工作阶段,即确定步。
确定初始步,自动门一般是处于关闭状态,把关闭状态作为初始步S0。
根据控制要求,自动门一个循环包括6个阶段:高速开门、低速开门、延时等待、高速关门、低速关门、延时等待,6个阶段作为6个工作步,分别用S21、S22、S23、S24、S25、S26表示。
因此该顺序功能图有一个初始步和6个工作步。
2)确定负载、转移条件和转移目标。
自动门各工作步的负载、转移条件和转移目标如表4.4-5所示。由于用定时器T0、T1来控制等待持续时间,因此定时器T0、T1的触点即为相应工作步的转移条件。
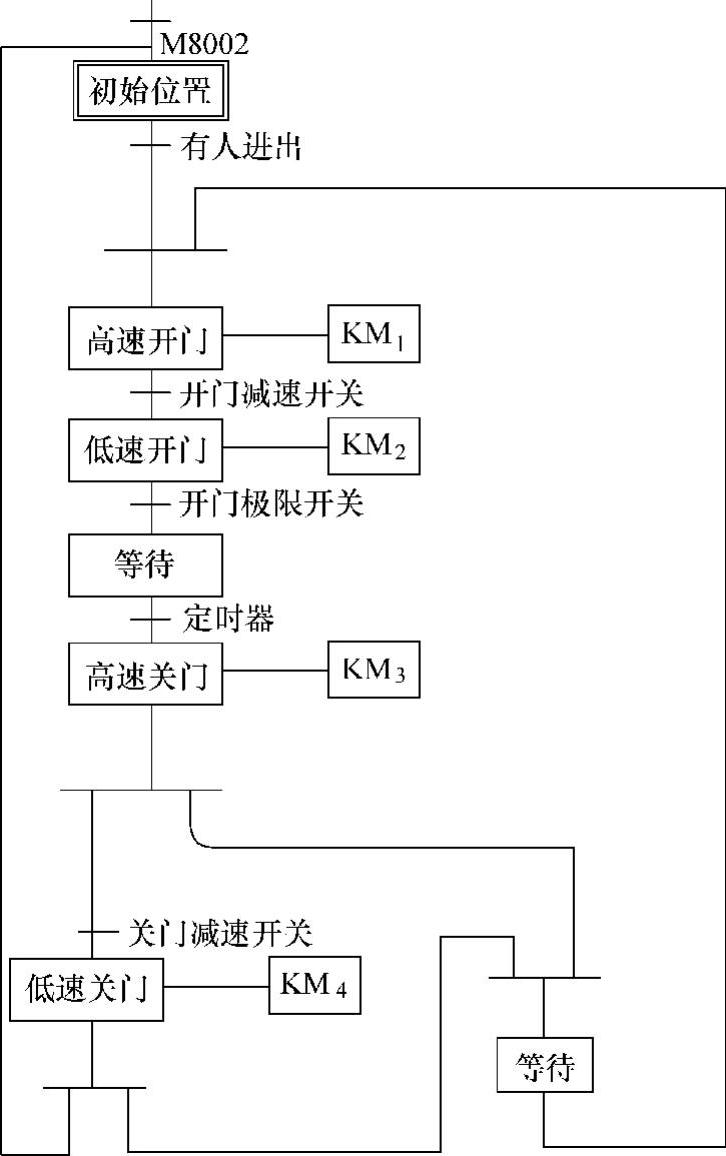
图4.4-16 自动门控制系统的工作流程图
表4.4-5 各工作步的负载、转移条件和转移目标

①选择序列B的两个分支在步S21合并。
②选择序列E的两个分支在步S26合并。
在关门步S24、S25的关门过程中,若有人要求进入,则停止关门,进入等待步,因此在步S24、S25有一个选择序列的分支,而在步S26有一个选择序列的合并。
综上所述可设计出如图4.4-17所示的顺序功能图。
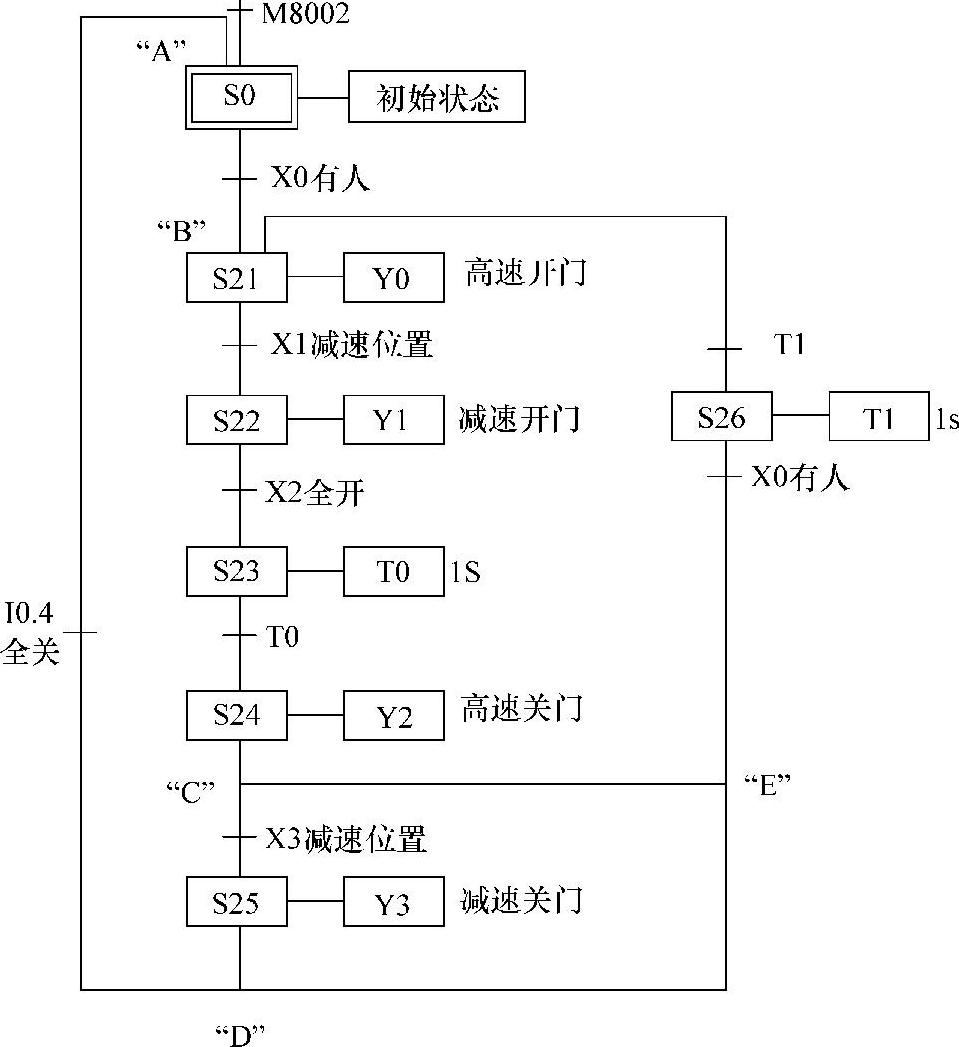
图4.4-17 顺序功能图
(4)设计梯形图
1)按S0→S21→S22→S23→S24→S25→S0顺序,设计单序列梯形图。
如图4.4-18中的细实线所示。
2)然后考虑在相关步添加选择序列的梯形图。(https://www.xing528.com)
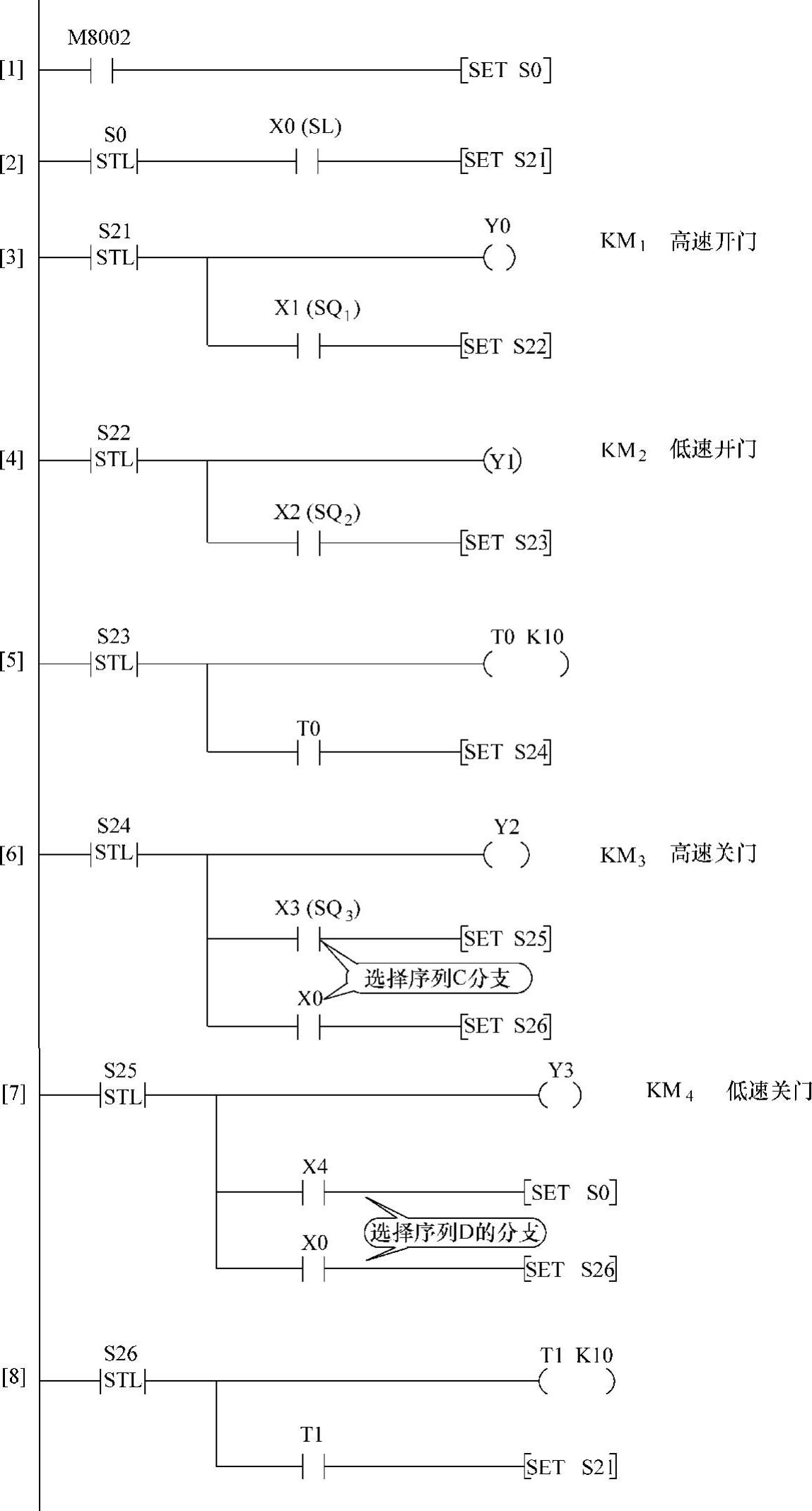
图4.4-18 梯形图
如图4.4-18中的粗实线所示。
1)在步S24,由于转换条件X3、X0不同,使转移目标的步S25、S26不同,因而实现选择序列分支。
2)在步S25,由于转移条件X4、X0的不同,使转移目标的步S0、S26不同,因而实现选择序列分支。
3)在步S24、步S25,由于转移条件X0相同,并且转移相同的步S26,因而实现选择序列E的合并。
4)在步S0、步S26内,由于转移条件X0、T1不同,但转移到相同的步S21[3],因而实现选择序列B的合并。
5)在步S0和步S25,由于转移条件M8002、X4不同,但转移到相同的步S0,因而实现选择序列A的合并。
综上所述,并结合表4.4-5和图4.4-17,可设计出图4.4-18所示梯形图。
(5)电路工作过程
PLC上电后,◎M8002闭合1个扫描周期→S0[1]置位并保持,步入步S0。
1)进入步S0[2]。

2)进入步S21[3]。

3)进入步S22[4]。

4)进入步S23[5]。

5)步S24[6]。
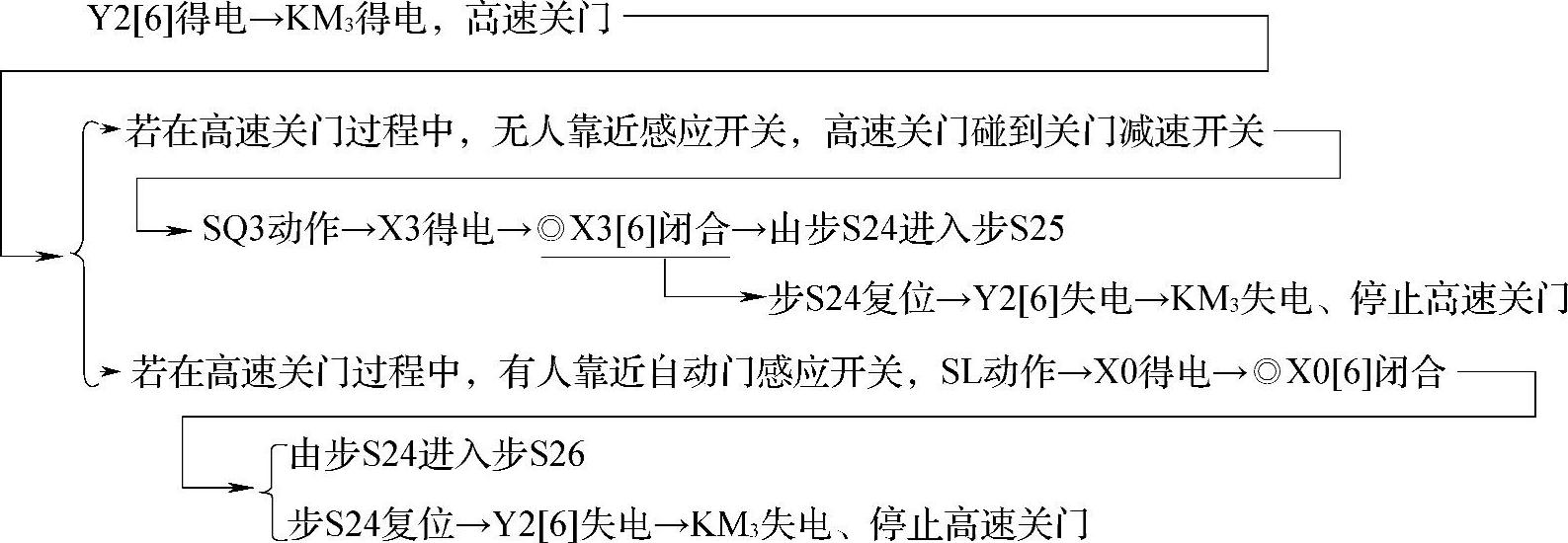
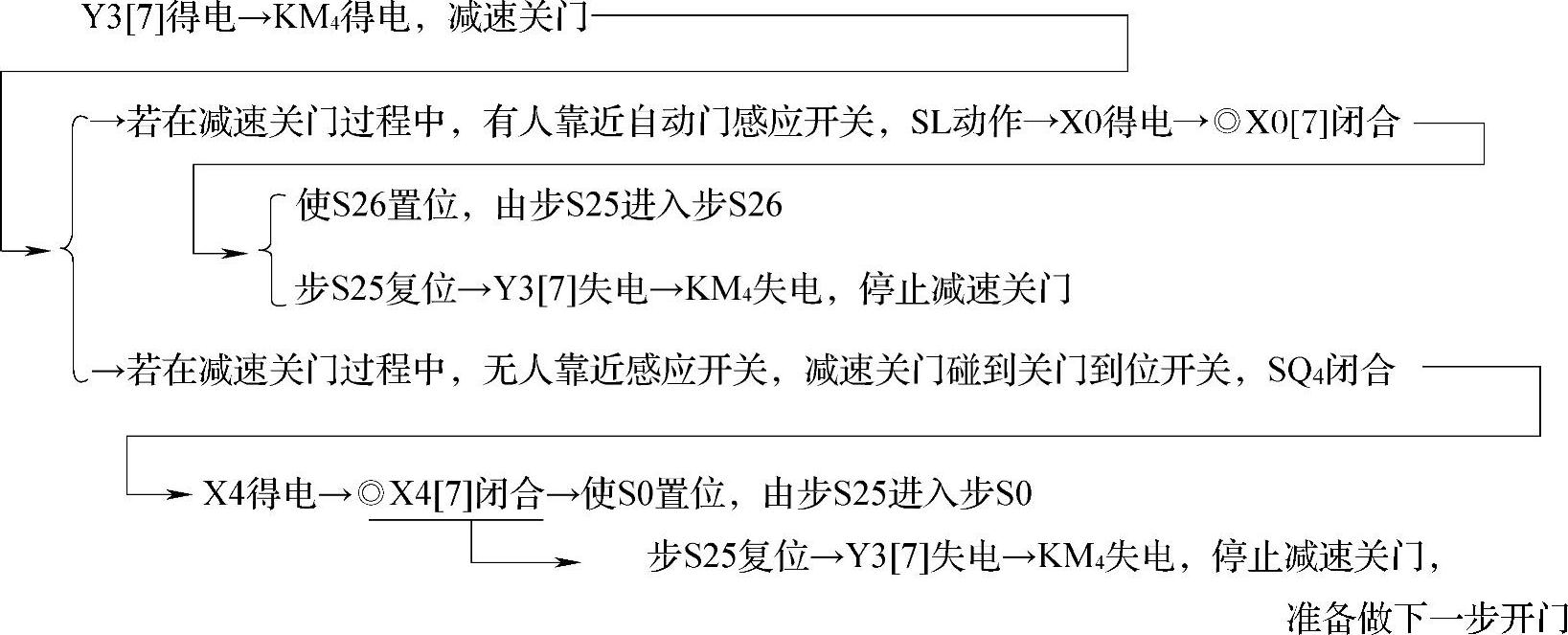
6)步S25[7]。
7)步S26[8]。

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。