



伺服阀通过改变输入信号,连续、成比例地控制液压系统的流量或压力。电液伺服阀输入信号功率很小(通常仅有几十毫瓦),功率放大系数高;能够对输出流量和压力进行连续双向控制。其突出特点是:体积小、结构紧凑、直线性好、动态响应好、死区小、精度高,符合高精度伺服控制系统的要求。电液伺服阀是现代电液控制系统中的关键部件,它能用于诸如位置控制、速度控制、加速度控制、力控制等各方面。因此,伺服阀在各种工业自动控制系统中得到了越来越多的应用。
1.工作原理及组成
(1)基本组成与控制机理 电液伺服阀是一种自动控制阀,它既是电液转换组件,又是功率放大组件,其功用是将小功率的模拟量电信号输入转换为随电信号大小和极性变化、且快速响应的大功率液压能[流量(或)和压力]输出,从而实现对液压执行器位移(或转速)、速度(或角速度)、加速度(或角加速度)和力(或转矩)的控制。电液伺服阀通常是由电气-机械转换器、液压放大器(先导级阀和功率级主阀)和检测反馈机构组成,如图3-102所示。
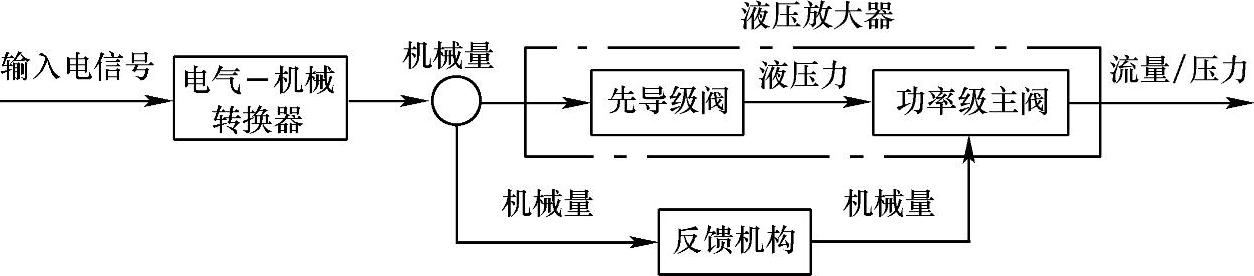
图3-102 电液伺服阀的组成
(2)电气-机械转换器 电气-机械转换器包括电流-力转换和力-位移转换两个功能。
典型的电气-机械转换器为力马达或力矩马达。力马达是一种直线运动电气-机械转换器,而力矩马达则是旋转运动的电气-机械转换器。力马达和力矩马达的功用是将输入的控制电流信号转换为与电流成比例的输出力或力矩,再经弹性组件(弹簧管、弹簧片等)转换为驱动先导级阀运动的直线位移或转角,使先导级阀定位、回零。通常力马达的输入电流为150~300mA,输出力为3~5N。力矩马达的输入电流为10~30mA,输出力矩为0.02~0.06N·m。
伺服阀中所用的电气-机械转换器有动圈式和动铁式两种结构。
1)动圈式电气-机械转换器。动圈式电气-机械转换器产生运动的部分是控制线圈,故称为动圈式。输入电流信号后,产生相应大小和方向的力信号,再通过反馈弹簧(复位弹簧)转化为相应的位移量输出,故简称为动圈式力马达(平动式)或力矩马达(转动式)。动圈式力马达和力矩马达的工作原理是位于磁场中的载流导体(即动圈)受力作用。
动圈式力马达的结构原理如图3-103所示,永久磁铁1及内、外导磁体2、3构成闭合磁路,在环状工作气隙中安放着可移动的控制线圈4,它通常绕制在线圈架上,以提高结构强度,并采用弹簧5悬挂。当线圈中通入控制电流时,按照载流导线在磁场中受力的原理移动并带动阀芯(图中未画出)移动,此力的大小与磁场强度、导线长度及电流大小成比例,力的方向由电流方向及固定磁通方向按电磁学中的左手定则确定。图3-104为动圈式力矩马达,与力马达所不同的是采用扭力弹簧或轴承加盘圈扭力弹簧悬挂控制线圈。当线圈中通入控制电流时,按照载流导线在磁场中受力的原理使转子转动。
磁场的励磁方式有永磁式和电磁式两种,工程上多采用永磁式结构,其尺寸紧凑。
动圈式力马达和力矩马达的控制电流较大(可达几百毫安至几安培),输出行程也较大[±(2~4)mm],而且稳态特性线性度较好,滞环小,故应用较多。但其体积较大,且由于动圈受油的阻尼较大,其动态响应不如动铁式力矩马达快,多用于控制工业伺服阀,也有用于控制高频伺服阀的特殊结构动圈式力马达。
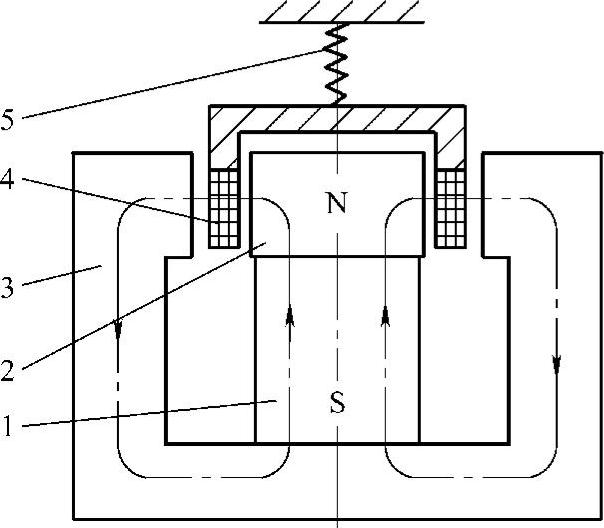
图3-103 动圈式力马达
1—永久磁铁 2—内导磁体 3—外导磁体 4—线圈 5—弹簧
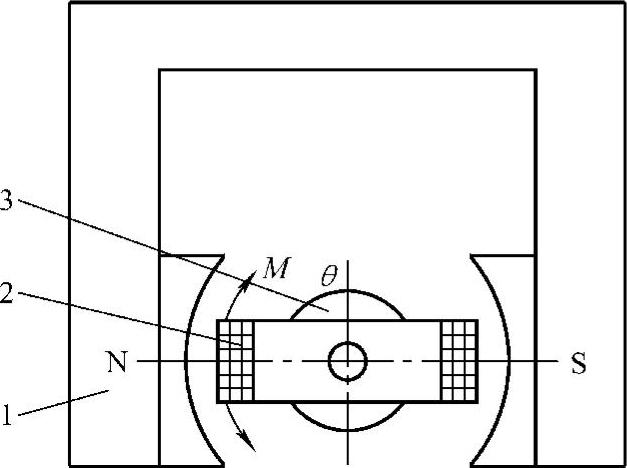
图3-104 动圈式力矩马达
1—永久磁铁 2—线圈 3—转子
2)动铁式力矩马达。动铁式力矩马达输入为电信号,输出为力矩。图3-105为动铁式力矩马达的结构原理图。
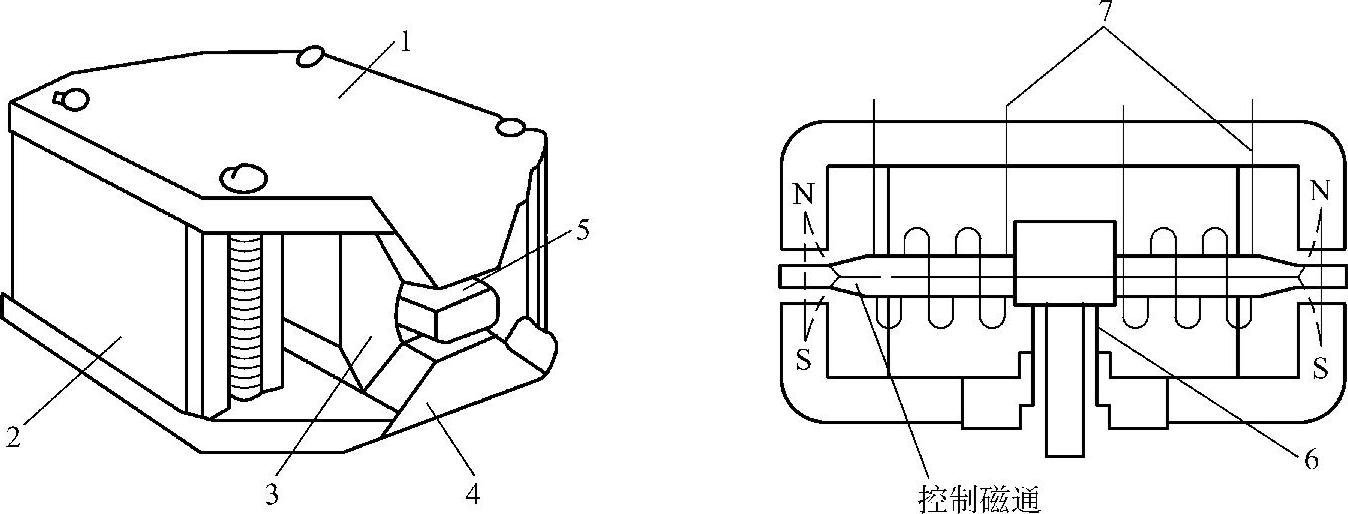
图3-105 动铁式力矩马达的结构原理图
1—上导磁体 2—永久磁铁 3—线圈 4—下导磁体 5—衔铁 6—弹簧管 7—线圈引出线
它由左右两块永久磁铁、上下两块导磁体1及4、弹簧管(带扭轴)6的衔铁5及套在线圈上的两个控制线圈3组成,衔铁悬挂在弹簧管上,可以绕弹簧管在四个气隙中摆动。左右两块永久磁铁使上下导磁体的气隙中产生相同方向的极化磁场。没有输入信号时,衔铁与上下导磁体之间的四个气隙距离相等,衔铁受到的电磁力相互抵消而使衔铁处于中间平衡状态。当输入控制电流时,产生相应的控制磁场,它在上下气隙中的方向相反,因此打破了原有的平衡,使衔铁产生与控制电流大小和方向相对应的转矩,并且使衔铁转动,直至电磁力矩与负载力矩和弹簧反力矩等相平衡。但转角是很小的,可以看成是微小的直线位移。
动铁式力矩马达输出力矩较小,适合控制喷嘴挡板之类的先导级阀。其优点是自振频率较高,动态响应快,功率、质量比较大,抗加速度零漂性好。缺点是:限于气隙的形式,其转角和工作行程很小(通常小于0.2mm),材料性能及制造精度要求高,价格昂贵;此外,它的控制电流较小(仅几十毫安),故抗干扰能力较差。
(3)先导级阀 先导级阀又称前置级,用于接受小功率的电气-机械转换器输入的位移或转角信号,将机械量转换为液压力驱动功率级主阀,犹如一对称四通阀控制的液压缸;主阀多为滑阀,它将先导级阀的液压力转换为流量或压力输出。电液伺服阀先导级主要有喷嘴挡板式和射流管式两种。
1)喷嘴挡板式先导级阀。它的结构及组成原理如图3-106所示(图3-106a为单喷嘴,图3-106b为双喷嘴),它是通过改变喷嘴与挡板之间的相对位移来改变液流通路开度的大小以实现控制的,具有体积小、运动部件惯量小、无摩擦、所需驱动力小、灵敏度高等优点,特别适用于小信号工作,因此常用作二级伺服阀的前置放大级。其缺点主要是中位泄漏量大、负载刚性差、输出流量小、节流孔及喷嘴的间隙小(0.02~0.06mm)、易堵塞、抗污染能力差。
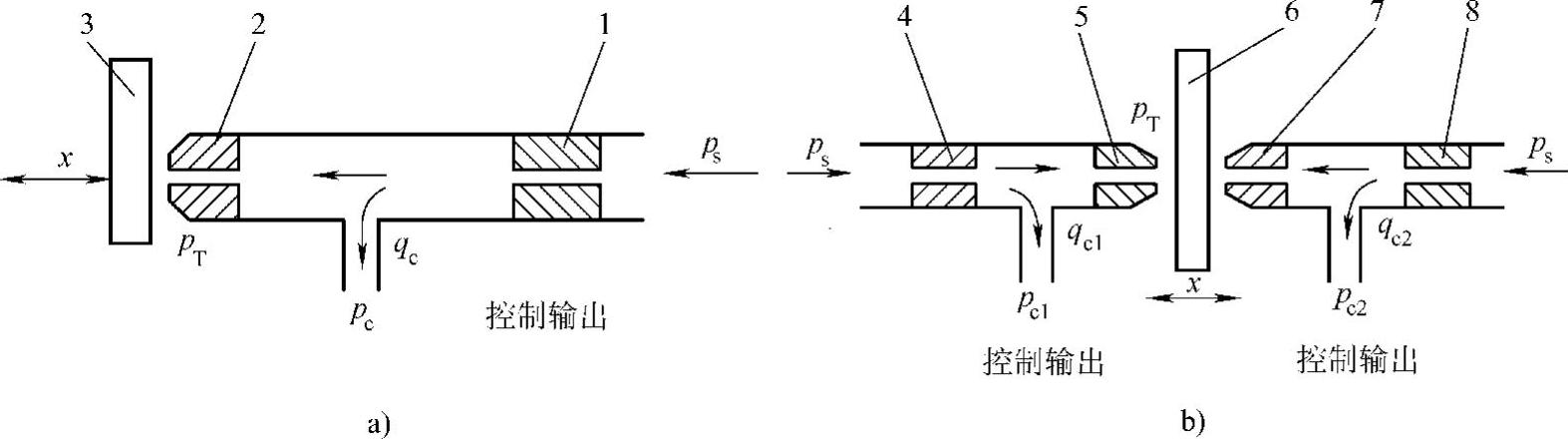
图3-106 喷嘴挡板式先导级阀
a)单喷嘴 b)双喷嘴 1,4,8—固定节流孔 2,5,7—喷嘴3,6—挡板 ps—输入压力 pv—喷嘴处油液压力 pc、qc—控制输出压力、流量
2)射流管式先导级阀。如图3-107所示,射流管阀由射流管3、接受板2和液压缸1组成,射流管3由垂直于图面的轴c支撑并可绕轴左右摆动一个不大的角度。接受板上的两个小孔a和b分别和液压缸1的两腔相通。当射流管3处于两个接受孔道a、b的中间位置时,两个接受孔道a、b内的油液的压力相等,液压缸1不动;如有输入信号使射流管3向左偏转一个很小的角度时,两个接受孔道a、b内的压力不相等,液压缸1左腔的压力大于右腔的,液压缸1向右移动,反之亦然。
射流管的优点是结构简单、加工精度低、抗污染能力强。缺点是惯性大、响应速度低、功率损耗大。因此这种阀只适用于低压及功率较小的伺服系统。
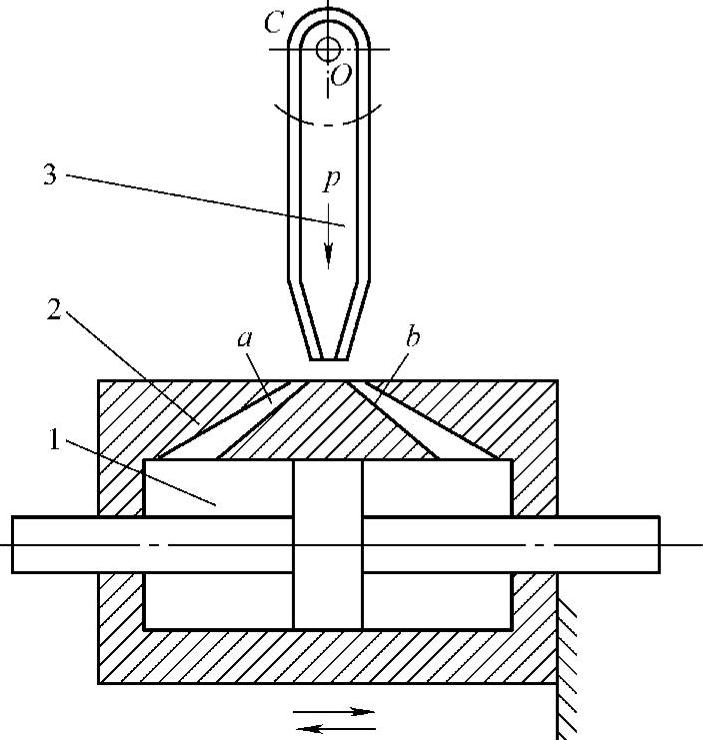
图3-107 射流管阀
1—液压缸 2—接受板 3—射流管
(4)功率级主阀(滑阀)电液伺服阀中的功率级主阀是靠节流原理进行工作,即借助阀芯与阀体(套)的相对运动改变节流口通流面积的大小,对液体流量或压力进行控制。滑阀的结构及特点如下:
1)控制边数。根据控制边数的不同,滑阀有单边控制、双边控制和四边控制三种类型(图3-108)。单边控制滑阀仅有一个控制边,控制边的开口量x控制了执行器(此处为单杆液压缸)中的压力和流量,从而改变了缸的运动速度和方向。双边控制滑阀有两个控制边,压力油一路进入单杆液压缸有杆腔,另一路经滑阀控制边x1的开口和无杆腔相通,并经控制边x2的开口流回油箱;当滑阀移动时,x1增大,x2减小,或相反,从而控制液压缸无杆腔的回油阻力,故改变了液压缸的运动速度和方向。四边控制滑阀有四个控制边,x1和x2是用于控制压力油进入双杆液压缸的左、右腔,x3和x4用于控制左、右腔通向油箱;当滑阀移动时,x3和x4增大,x2和x3减小,或相反,这样控制了进入液压缸左、右腔的油液压力和流量,从而控制了液压缸的运动速度和方向。
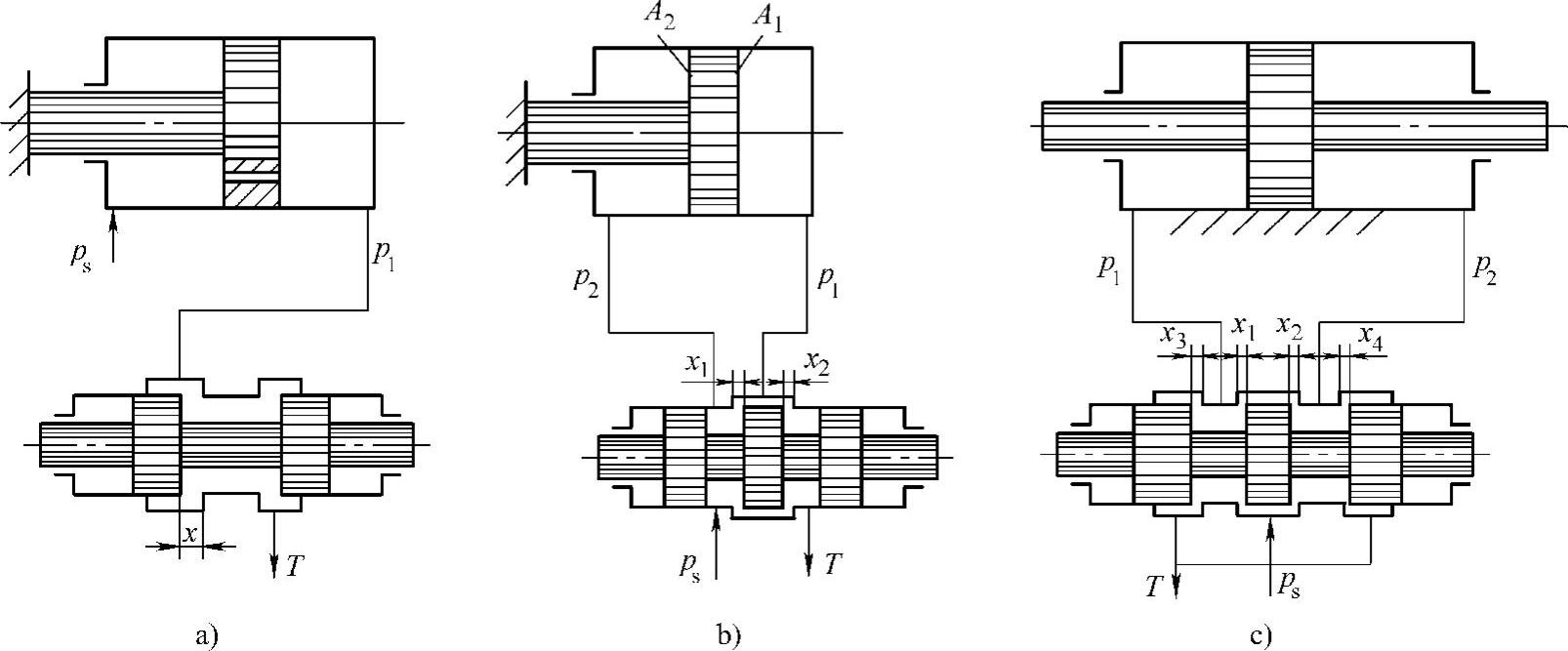
图3-108 单边、双边和四边控制滑阀
a)单边 b)双边 c)四边
单边、双边和四边控制滑阀的控制作用相同。单边和双边控制滑阀用于控制单杆液压缸;四边控制滑阀既可以控制双杆缸,也可以控制单杆缸。四边控制滑阀的控制质量好,双边控制滑阀居中,单边控制滑阀最差。但是,单边控制滑阀无关键性的轴向尺寸,双边控制滑阀有一个关键性的轴向尺寸,而四边控制滑阀有三个关键性的轴向尺寸,所以单边控制滑阀易于制造、成本较低,而四边控制滑阀制造困难、成本较高。通常,单边和双边控制滑阀用于一般控制精度的液压系统,而四边控制滑阀则用于控制精度及稳定性要求较高的液压系统。
2)零位开口形式。滑阀在零位(平衡位置)时,有正开口、零开口和负开口三种开口形式(图3-109)。正开口(又称负重叠)的滑阀,阀芯的凸肩宽度(也称凸肩宽,下同)t小于阀套(体)的阀口宽度h;零开口(又称零重叠)的滑阀,阀芯的凸肩宽度t与阀套(体)的阀口宽度h相等;负开口(又称正重叠)的滑阀,阀芯的凸肩宽度t大于阀套(体)的阀口宽度h。滑阀的开口形式对其零位附近(零区)的特性具有很大影响,零开口滑阀的特性较好,应用最多,但加工比较困难,价格昂贵。
3)通路数、凸肩数与阀口形状。按通路数滑阀有二通、三通和四通等几种。二通滑阀(单边阀)(图3-108a)只有一个可变节流口(可变液阻),使用时必须和一个固定节流口配合,才能控制一腔的压力,用来控制差动液压缸。三通滑阀(图3-108b)只有一个控制口,故只能用来控制差动液压缸,为实现液压缸反向运动,需在有杆腔设置固定偏压(可由供油压力产生)。四通滑阀(图3-108c)有四个控制口,故能控制各种液压执行器。
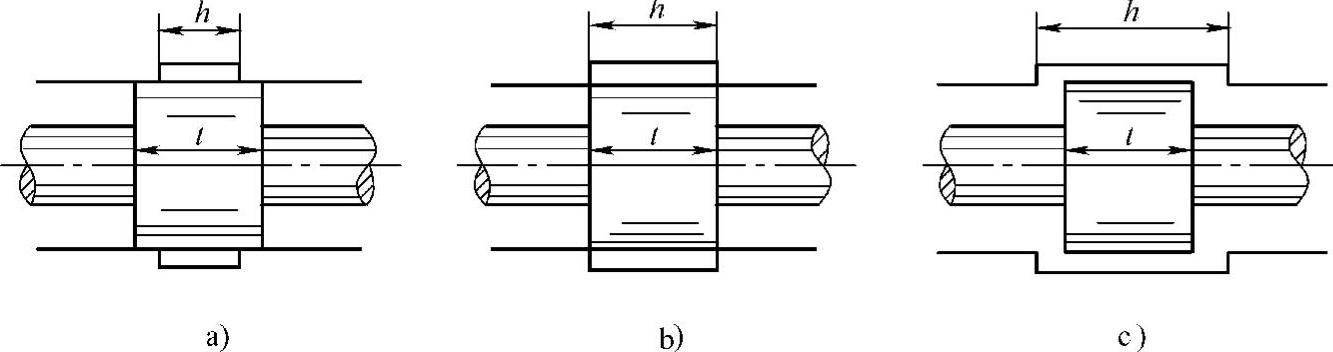
图3-109 滑阀的零位开口形式
a)负开口(t>h) b)零开口(t=h) c)正开口(t<h)
阀芯上的凸肩数与阀的通路数、供油及回油密封、控制边的布置等因素有关。二通阀一般为两个凸肩,三通阀为两个或三个凸肩,四通阀为三个或四个凸肩。三凸肩滑阀为最常用的结构形式。凸肩数过多将加大阀的结构复杂程度、长度和摩擦力,影响阀的成本和性能。
滑阀的阀口形状有矩形、圆形等多种形式,矩形阀口又有全周开口和部分开口之分。矩形阀口的开口面积与阀芯位移成正比,具有线性流量增益,故应用较多。
(5)检测反馈机构 设在阀内部的检测反馈机构将先导阀或主阀控制口的压力、流量或阀芯的位移反馈到先导级阀的输入端或比例放大器的输入端,实现输入输出的比较,解决功率级主阀的定位问题,并获得所需的伺服阀压力-流量性能。常用的反馈形式有机械反馈(位移反馈、力反馈)、液压反馈(压力反馈、微分压力反馈等)和电气反馈。
2.电液伺服阀的分类
电液伺服阀的分类如图3-110所示。
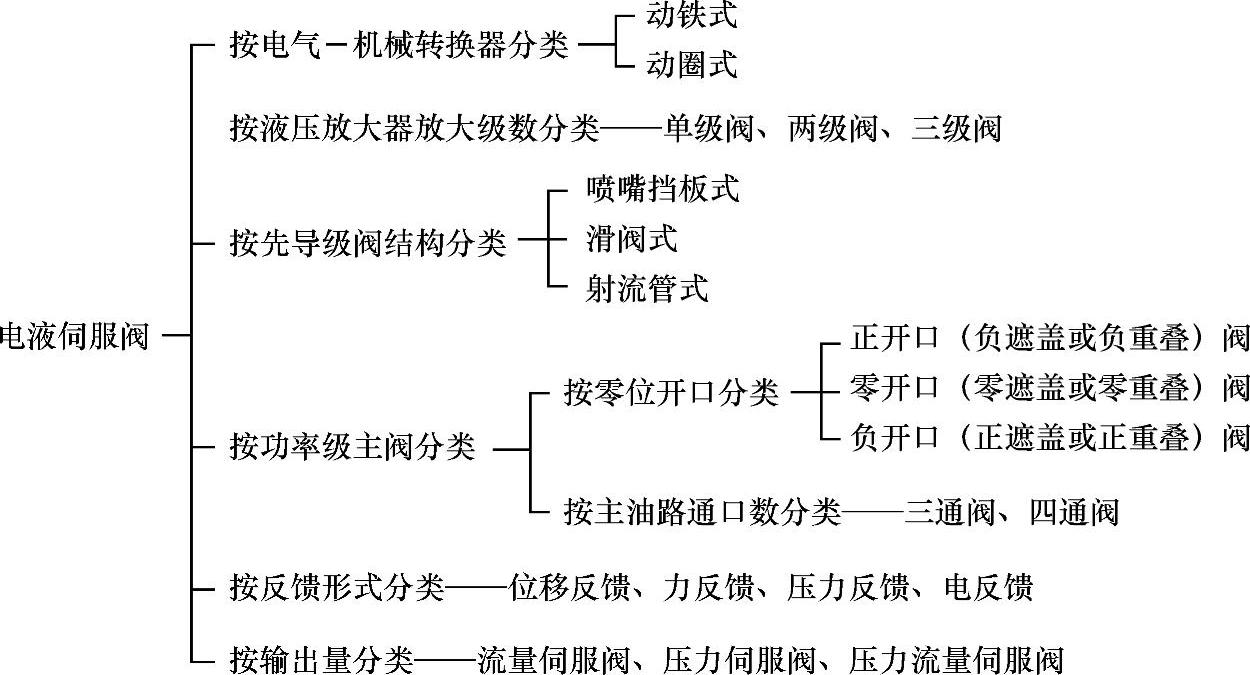
图3-110 电液伺服阀的分类
3.典型结构
(1)动圈式力马达型单级电液伺服阀 单级电液伺服阀没有先导级阀,由电气-机械转换器和一级液压阀构成,其结构和原理均较简单。图3-111a所示为动圈式力马达型单级电液伺服阀的结构图,它由力马达和带液动力补偿结构的一级滑阀两部分组成。永久磁铁1产生一固定磁场,可动线圈2通电后在磁场内产生力,从而驱动滑阀阀芯4运动,并由右端弹簧8作力反馈。阀左端的位移传感器5,可提供控制所需的补偿信号。因阀芯带有液动力补偿结构,故控制流量较大,响应快。额定流量为90~100L/min的阀在±40%输入幅值条件下,对应相位滞后90°时,频响为200Hz,常用于冶金机械的高速大流量控制。
动圈式力马达型单级电液伺服阀的原理方块图如图3-111b所示。
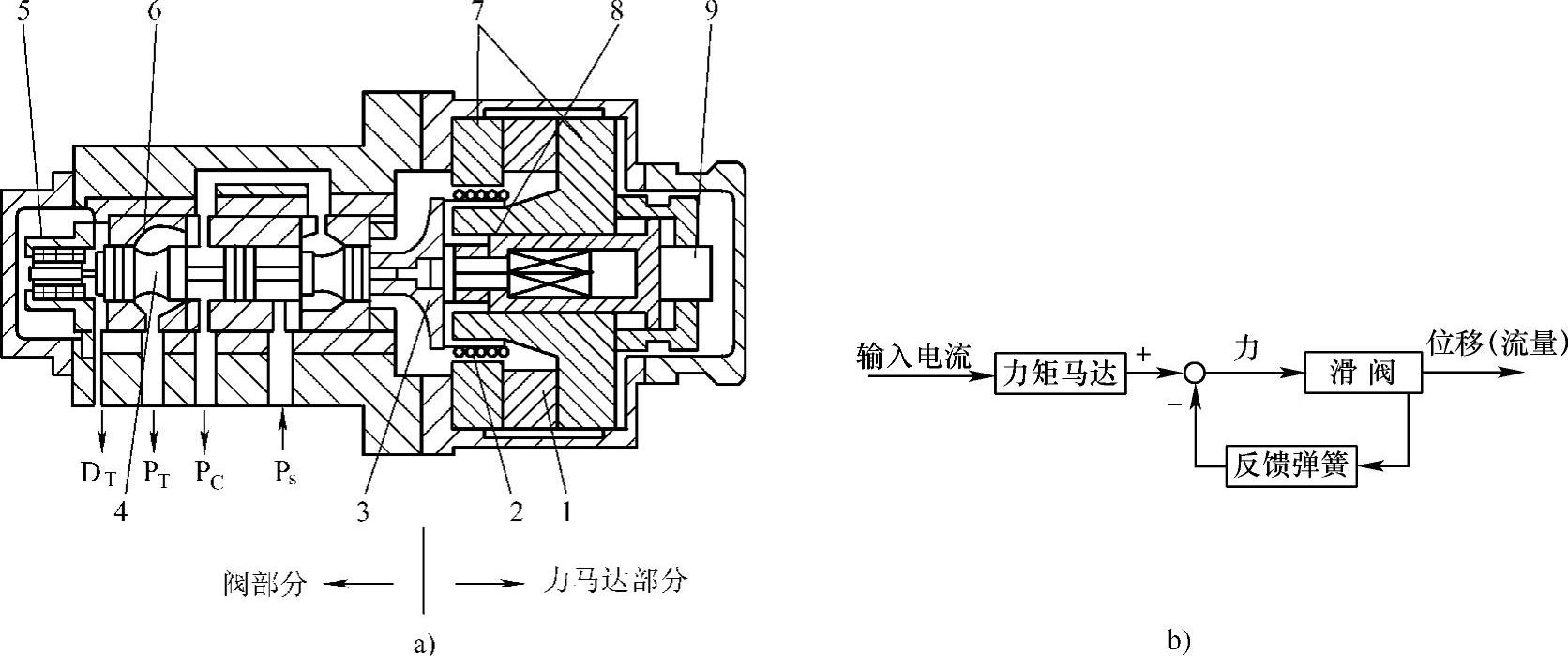
图3-111 动圈式力马达型单级电液伺服阀
a)结构图 b)原理方块图 1—永久磁铁 2—可动线圈 3—线圈架 4—阀芯(滑阀) 5—位移传感器 6—阀套 7—导磁体 8—弹簧 9—零位调节螺钉
(2)喷嘴挡板式力反馈型两级电液伺服阀 两级电液伺服阀多用于控制流量较大(80~250L/min)的场合。两级电液伺服阀由电气-机械转换器、先导级阀和功率级主阀组成,种类较多。喷嘴挡板式力反馈电液伺服阀是使用量大、适用面广的两级电液伺服阀。
图3-112a所示为电液伺服阀结构,它由力矩马达、喷嘴挡板式液压前置放大级和四边滑阀功率放大级等三部分组成。衔铁3与挡板5连接在一起,由固定在阀体11上的弹簧管10支撑着。挡板5下端为一球头,嵌放在滑阀9的凹槽内,永久磁铁1和导磁体2、4形成一个固定磁场,当线圈12中没有电流通过时,导磁体2、4和衔铁3间四个气隙中的磁通都是ϕg,且方向相同,衔铁3处于中间位置。当有控制电流通入线圈12时,一组对角方向的气隙中的磁通增加,另一组对角方向的气隙中的磁通减小,于是衔铁3就在磁力作用下克服弹簧管11的弹性反作用力而偏转一角度,并偏转到磁力所产生的转矩与弹性反作用力所产生的反转矩平衡时为止。同时,挡板5因随衔铁3偏转而发生挠曲,改变了它与两个喷嘴6间的间隙,一个间隙减小,另一个间隙加大。
通入伺服阀的压力油经过滤器8、两个对称的固定节流孔7和左右喷嘴6流出,通向回油。当挡板5挠曲,出现上述喷嘴-挡板的两个间隙不相等的情况时,两喷嘴后侧的压力就不相等,它们作用在滑阀9的左、右端面上,使滑阀9向相应方向移动一段距离,压力油就通过滑阀9上的一个阀口输向液压执行机构,由液压执行机构回来的油则经滑阀9上的另一个阀口通向回油。滑阀9移动时,挡板5下端球头跟着移动。在衔铁挡板组件上产生了一个转矩,使衔铁3向相应方向偏转,并使挡板5在两喷嘴6间的偏移量减少,这就是反馈作用。反馈作用的结果是使滑阀9两端的压差减小。当滑阀9上的液压作用力和挡板5下端球头因移动而产生的弹性反作用力达到平衡时,滑阀9便不再移动,并一直使其阀口保持在这一开度上。
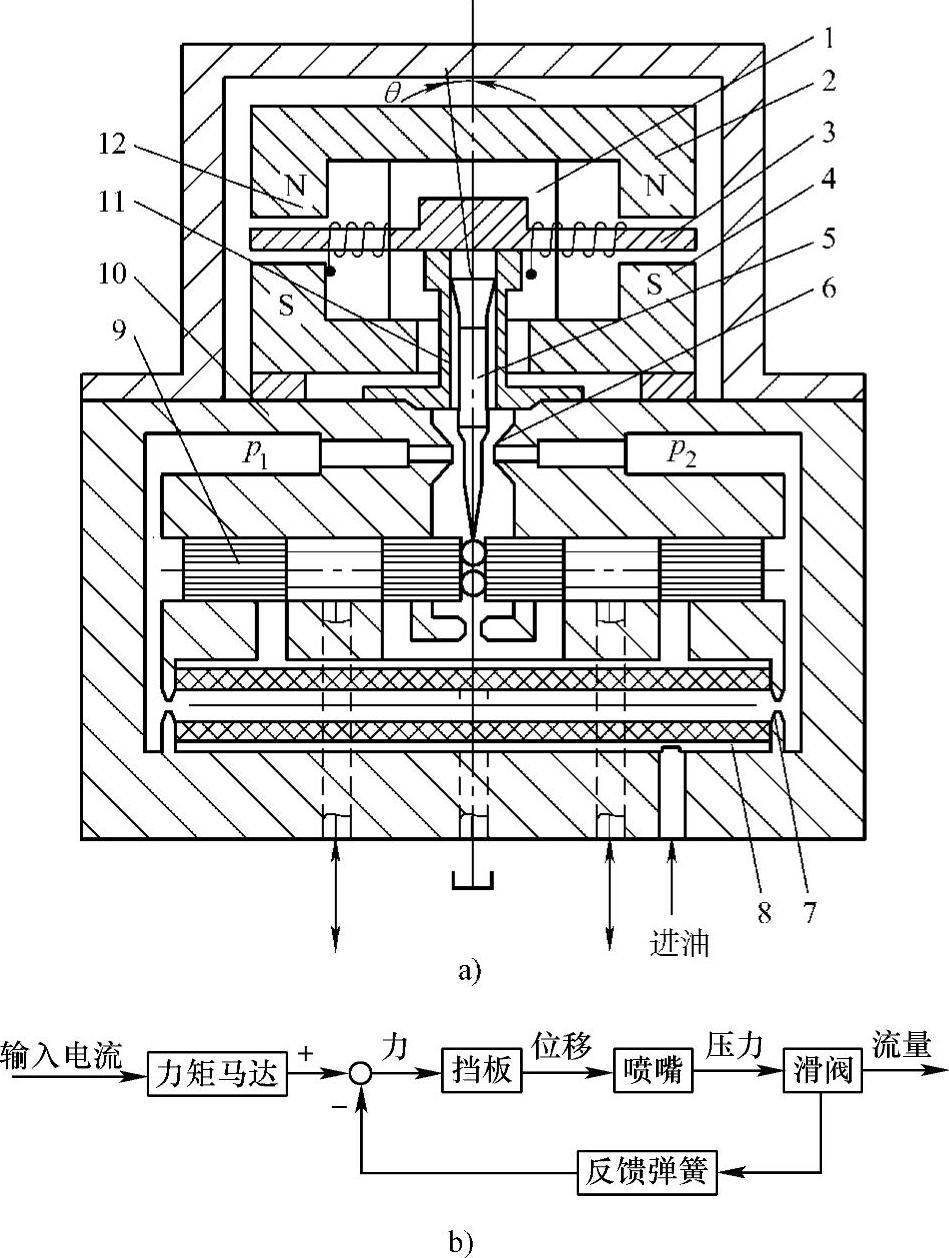
图3-112 喷嘴挡板式力反馈型两级电液伺服阀
a)电液伺服阀结构 b)原理方块图 1—永久磁铁 2、4—导磁体 3—衔铁 5—挡板 6—喷嘴 7—固定节流孔 8—过滤器 9—滑阀 10—弹簧管 11—阀体 12—线圈
通入线圈12的控制电流越大,使衔铁3偏转的转矩、挡板5挠曲变形、滑阀9两端的压差以及滑阀9的偏移量就越大,伺服阀输出的流量也越大。由于滑阀9的位移、喷嘴6与挡板5之间的间隙、衔铁3的转角都依次和输入电流成正比,因此这种阀的输出流量也和电流成正比。输入电流反向时,输出流量也反向。
喷嘴挡板式力反馈电液伺服阀的原理方块图如图3-112b所示。
双喷嘴挡板式电液伺服阀具有线性度好、动态响应快、压力灵敏度高、阀芯基本处于浮动、不易卡阻、温度和压力零漂小等优点,其缺点是抗污染能力差[喷嘴挡板级间隙较小(仅0.02~0.06mm),阀易堵塞],内泄漏较大、功率损失大、效率低,力反馈回路包围力矩马达,流量大时提高阀的频宽受到限制。
(3)直接位置反馈型电液伺服阀 直接位置反馈型电液伺服阀的主阀芯与先导阀阀芯构成直接位置比较和反馈,其工作原理如图3-113所示。图3-113中,先导阀直径较小,直接由动圈式力马达的线圈驱动,力马达的输入电流约为0~±300mA。当输入电流I=0时,力马达线圈的驱动力Fi=0,先导阀阀芯位于主阀零位没有运动;当输入电流逐步加大到I=300mA时,力马达线圈的驱动力也逐步加大到约为40N,压缩力马达弹簧后,使先导阀阀芯产生位移约为4mm;当输入电流改变方向,I=-300mA时,力马达线圈的驱动力也变成约-40N,带动先导阀阀芯产生反向位移约-4mm。上述过程说明先导阀阀芯的位移x芯与输入电流I成比例,运动方向与电流方向保持一致。先导阀阀芯直径小,无法控制系统中的大流量;主阀芯的阻力很大,力马达的推力又不足以驱动主阀芯。解决的办法是,先用力马达比例地驱动直径小的先导阀阀芯,再用位置随动(直接位置反馈)的办法让主阀芯等量跟随先导阀运动,最后达到用小信号比例地控制系统中的大流量之目的。
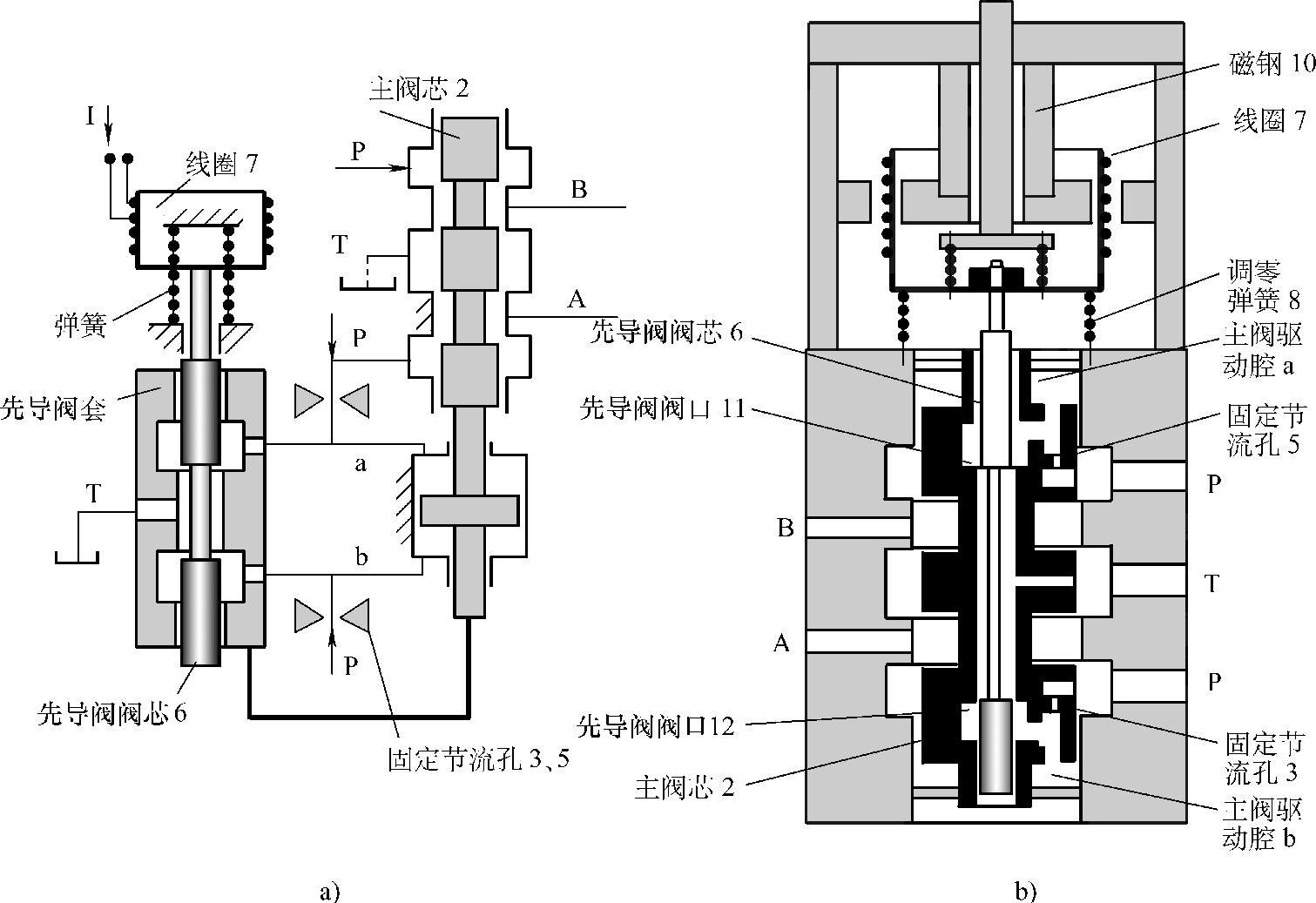
图3-113 直接位置反馈型电液伺服阀的工作原理图
主阀芯两端容腔为驱动主阀芯的对称双作用液压缸,该缸由先导阀供油,以控制主阀芯上下运动。由于先导阀阀芯直径小,加工困难,为了降低加工难度,可将先导阀上用于控制主阀芯上下两腔的进油阀口由两个固定节流孔代替,这样先导阀可看成是由两个带固定节流孔的半桥组成的全桥。为了实现直接位置反馈,将主阀芯、驱动液压缸、先导阀阀套三者做成一体,因此主阀芯位移xP(被控位移)反馈到先导阀上,与先导阀阀套位移x套相等。当先导阀阀芯在力马达的驱动下向上运动产生位移x芯时,先导阀阀芯与阀套之间产生开口量x芯-x套,主阀芯上腔的回油口打开,压差驱动主阀芯自下而上运动,同时先导阀口在反馈的作用下逐步关小。当先导阀口关闭时,主阀停止运动且主阀位移xP=x套=x芯。反向运动亦然。在这种反馈中,主阀芯等量跟随先导阀运动,故称为直接位置反馈。(https://www.xing528.com)
图3-114a所示为DY系列直接位置反馈型电液伺服阀的结构图。上部为动圈式力马达,下部是两级滑阀装置。压力油由P口进入,A、B口接执行元件,T口回油。由动圈7带动的先导滑阀6与空心主滑阀4的内孔配合,动圈与先导滑阀固连,并用两个弹簧8、9定位对中。先导滑阀上的两条控制边与主滑阀上两个横向孔形成两个可变节流口11、12。P口来的压力油除经主控油路外,还经过固定节流口3、5和可变节流口11、12,先导阀的环形槽和主滑阀中部的横向孔到了回油口,形成如图3-114b所示的前置液压放大器油路(桥路)。显然,前置级液压放大器是由具有两个可变节流口11、12的先导滑阀和两个固定节流口3、5组合而成的。桥路中固定节流口与可变节流口连接的节点a、b分别与主滑阀上、下两个台肩端面连通,主滑阀可在节点压力作用下运动。平衡位置时,节点a、b的压力相同,主滑阀保持不动。如果先导滑阀在动圈作用下向上运动,节流口11加大,12减小,a点压力降低,b点压力上升,主滑阀随之向上运动。由于主滑阀又兼作先导滑阀的阀套(位置反馈),故当主滑阀向上移动的距离与先导滑阀一致时,停止运动。同样,在先导滑阀向下运动时,主滑阀也随之向下移动相同的距离。故为直接位置反馈系统。这种情况下,动圈只需带动先导滑阀,力马达的结构尺寸就不至于太大。
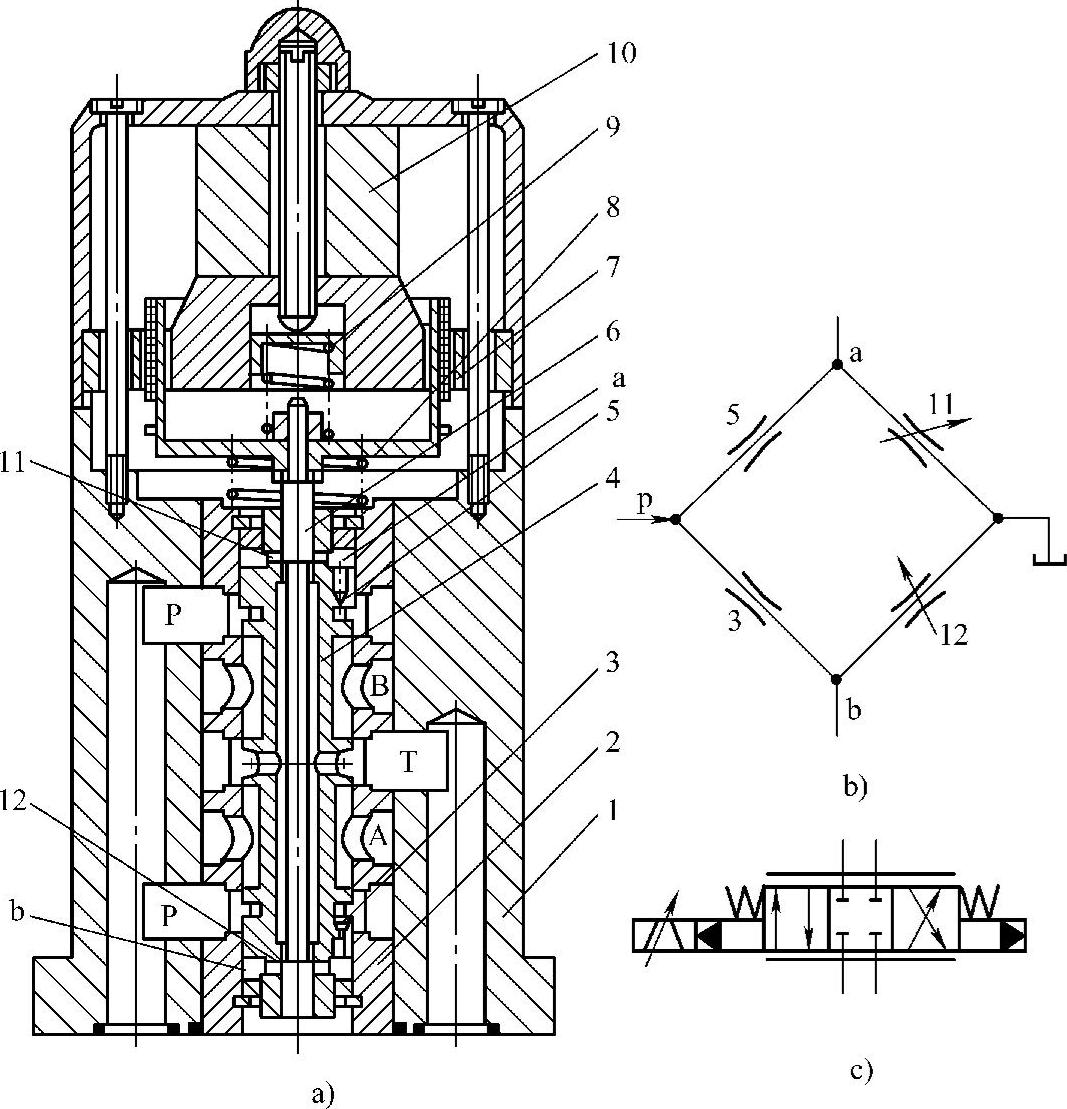
图3-114 DY型电液伺服阀
a)结构图 b)前置级液压放大器油路 c)电液伺服阀符号 1—阀体 2—阀座 3、5—固定节流口(Fixed Orifice) 4—主滑阀(Main Sliding Valve) 6—先导滑阀 7—线圈(动圈) 8—下弹簧 9—上弹簧 10—磁钢(Magnet)(永久磁铁) 11、12—可变节流口
主阀芯凸肩控制棱边与阀体油窗口的相应棱边的轴向尺寸是零开口状态精密配合,在工作过程中,动圈的位移量、先导阀阀芯的位移量与主阀芯的位移量均相等,而动圈的位移量与输入控制电流成比例,所以输出流量的大小在负载压力恒定的条件下与控制电流的大小成比例,输出流量的方向则取决于控制电流的极性。除控制电流外,在动圈绕组中加入高频小振幅颤振电流,可以克服阀芯的静摩擦,保证伺服阀具有灵敏的控制性能。
动圈滑阀式力马达型两级电液流量伺服阀的优点是力马达结构简单、磁滞小、工作行程大;阀的工作行程大、成本低、零区分辨率高、固定节流孔的尺寸大(直径达0.8mm)、抗污染能力强;主阀芯两端作用面积大,加大了驱动力,使主阀芯不易被卡阻。该阀价格低廉,工作可靠性高,且便于调整维护。特别适合用于一般工业设备的液压伺服控制。
4.主要特性及性能参数
(1)静态特性 电液伺服阀的静态特性是指稳定工作条件下,伺服阀的各静态参数(输出流量、输入电流和负载压力)之间的相互关系。主要包括负载流量特性、空载流量特性和压力特性,并由此可得到一系列静态指标参数。它可以用特性方程、特性曲线和阀系数三种方法表示。
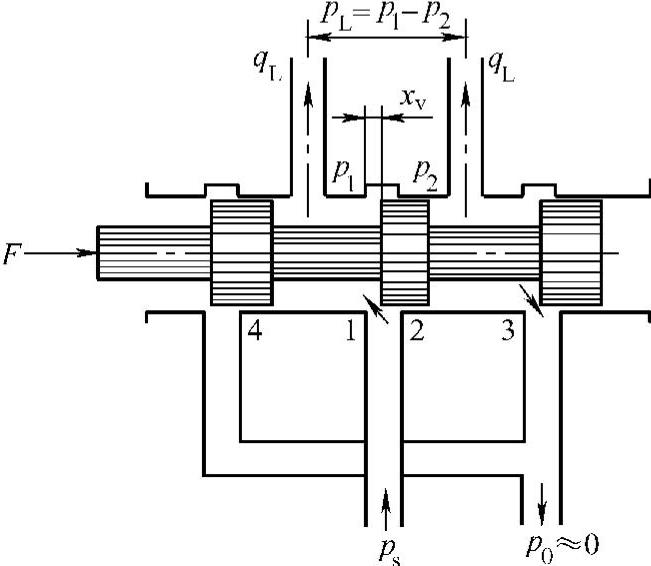
图3-115 零开口四边滑阀
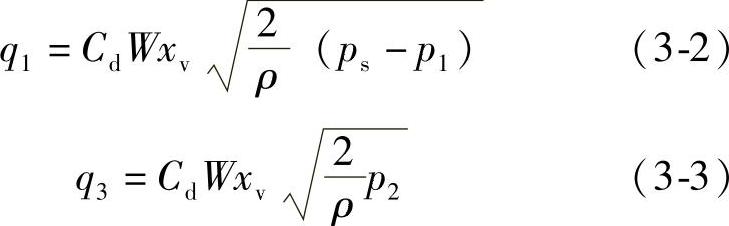
1)特性方程。理想零开口四边滑阀如图3-115,设阀口对称,各阀口流量系数相等,油液是理想液体,不计泄漏和压力损失,供油压力ps恒定不变。当阀芯从零位右移xv时,则流入、流出阀的流量q1、q3为
稳态时,q1=q3=qL,则可得供油压力ps=p1+p2。令负载压力pL=p1-p2,则有
p1=(ps+pL)/2 (3-4)
p2=(ps-pL)/2 (3-5)
将式(3-4)或式(3-5)代入式(3-2)或式(3-3)可得滑阀的负载流量(压力-流量特性)方程

式中 qL——负载流量;
Cd——流量系数;
W——滑阀的面积梯度(阀口沿圆周方向的宽度);
d——滑阀阀芯凸肩直径;
xv——滑阀位移;
ps——伺服阀供油压力;
pL——伺服阀负载压力。
对于典型两级力反馈电液伺服流量阀(先导级为双喷嘴挡板阀、功率级为零开口四边滑阀),滑阀位移xv=Kxvi,所以其负载流量(压力-流量特性)方程:

式中 Kxv——伺服阀增益(取决于力矩马达结构及几何参数);
i——力矩马达线圈输入电流。
其余符号意义与式(3-6)相同。
由式(3-7)可知,电液流量伺服阀的负载流量qL与功率级滑阀的位移z。成比例,而功率级滑阀的位移xv与输入电流i成正比,所以电液流量伺服阀的负载流量qL与输入电流i成比例。由此,可列出电液伺服阀负载流量的一般表达式为
qL=qL(xv,pL) (3-8)
它是一个非线性方程。
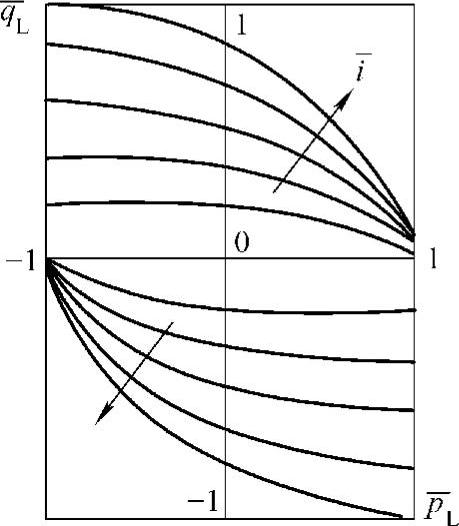
图3-116 电液伺服阀的负载流量特性曲线
注:1.pL为无量纲压力,pL=pL/ ps,pL为负载压力,ps为供油压力。
2. 为无量纲电流,
为无量纲电流, ,i为输入电流,im为额定电流。
,i为输入电流,im为额定电流。
3. 为无量纲流量,
为无量纲流量, qLm,qL为负载流量,qLm为最大空载流量。
qLm,qL为负载流量,qLm为最大空载流量。
2)特性曲线及静态性能指标
①负载流量特性曲线。它是输入不同电流时对应的流量与负载压力构成的抛物线簇曲线,如图3-116所示。负载流量特性曲线完全描述了伺服阀的静态特性。
②空载流量特性曲线。它是输出流量与输入电流呈回环状的函数曲线(图3-117),是在给定的伺服阀压降和零负载压力下,输入电流在正负额定电流之间作一完整的循环,输出流量点形成的完整连续变化曲线(简称流量曲线)。通过流量曲线,可以得出电液伺服阀的额定流量qR、流量增益、非线性度、滞环、不对称度、分辨率、零偏等性能指标参数。
③压力特性。它是输出流量为零(将两个负载口堵死)时,负载压降与输入电流呈回环状的函数曲线(图3-118)。在压力特性曲线上某点或某段的斜率称为压力增益,它直接影响伺服系统的承载能力和系统刚度,压力增益大,则系统的承载能力强、系统刚度大、误差小。
④静耗流量特性(内泄特性)。输出流量为零时,由回油口流出的内部泄漏量称为静耗流量。静耗流量随输入电流变化,当阀处于零位时,静耗流量最大(图3-119)。对于两级伺服阀,静耗流量由先导级的泄漏流量和功率级的泄漏流量两部分组成,减小前者将影响阀的响应速度;后者与滑阀的重叠情况有关,较大重叠可以减少泄漏,但会使阀产生死区,并可能导致阀淤塞,从而使阀的滞环与分辨率增大。
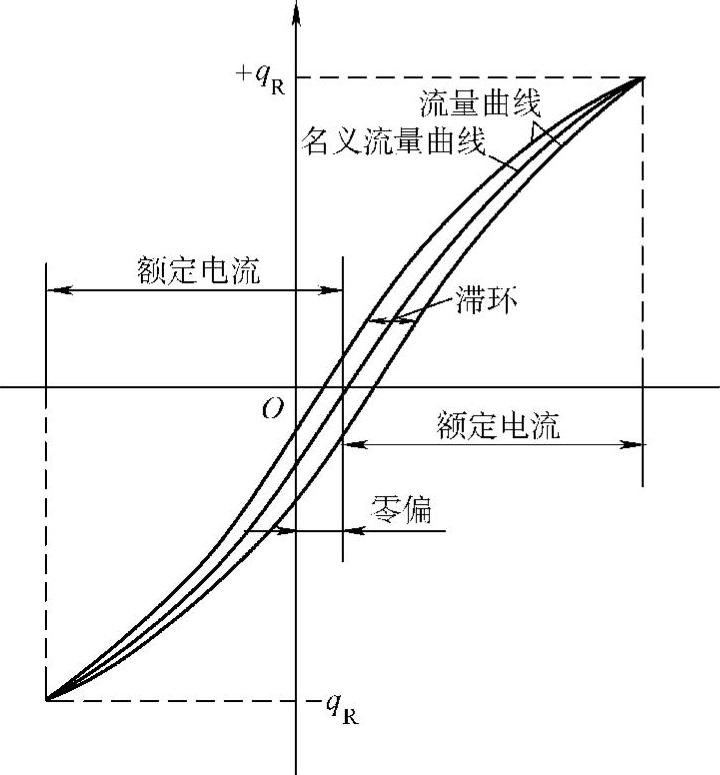
图3-117 空载流量特性曲线
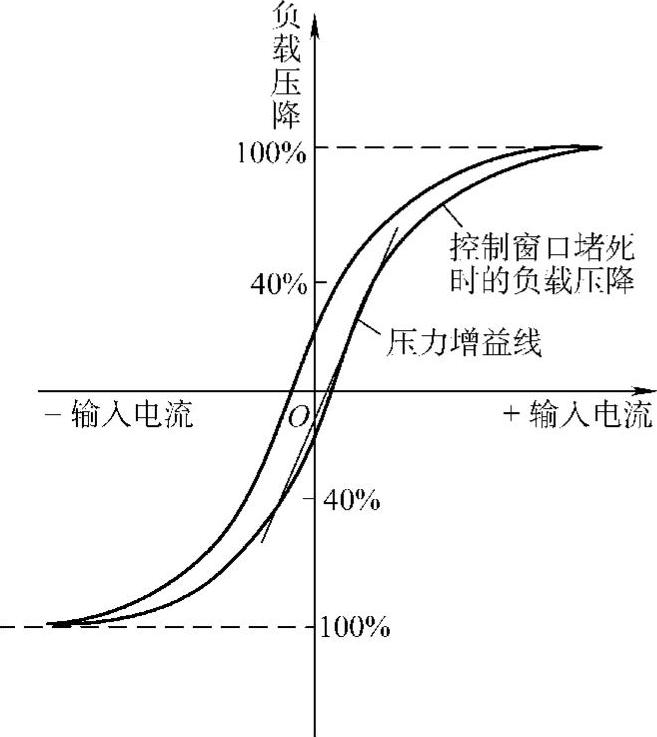
图3-118 压力特性曲线
3)阀系数。阀系数主要用于系统动态分析。式(3-8)线性化处理,并以增量形式,表示为

式中,各符号意义与式(3-8)相同。
由式(3-9)可定义阀的三个系数,见表3-1。
作为示例,表3-1中依据理想零开口四边滑阀的负载流量方程

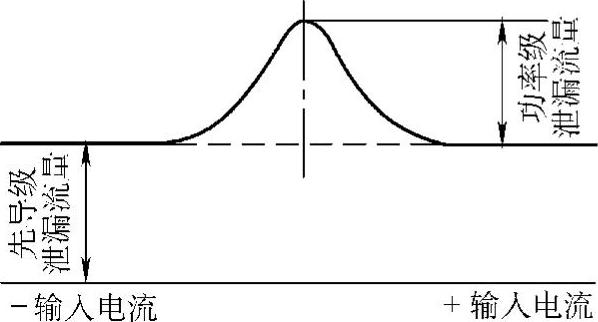
图3-119 静耗流量特性曲线
表3-1 伺服阀的阀系数示例(理想零开口四边滑阀)
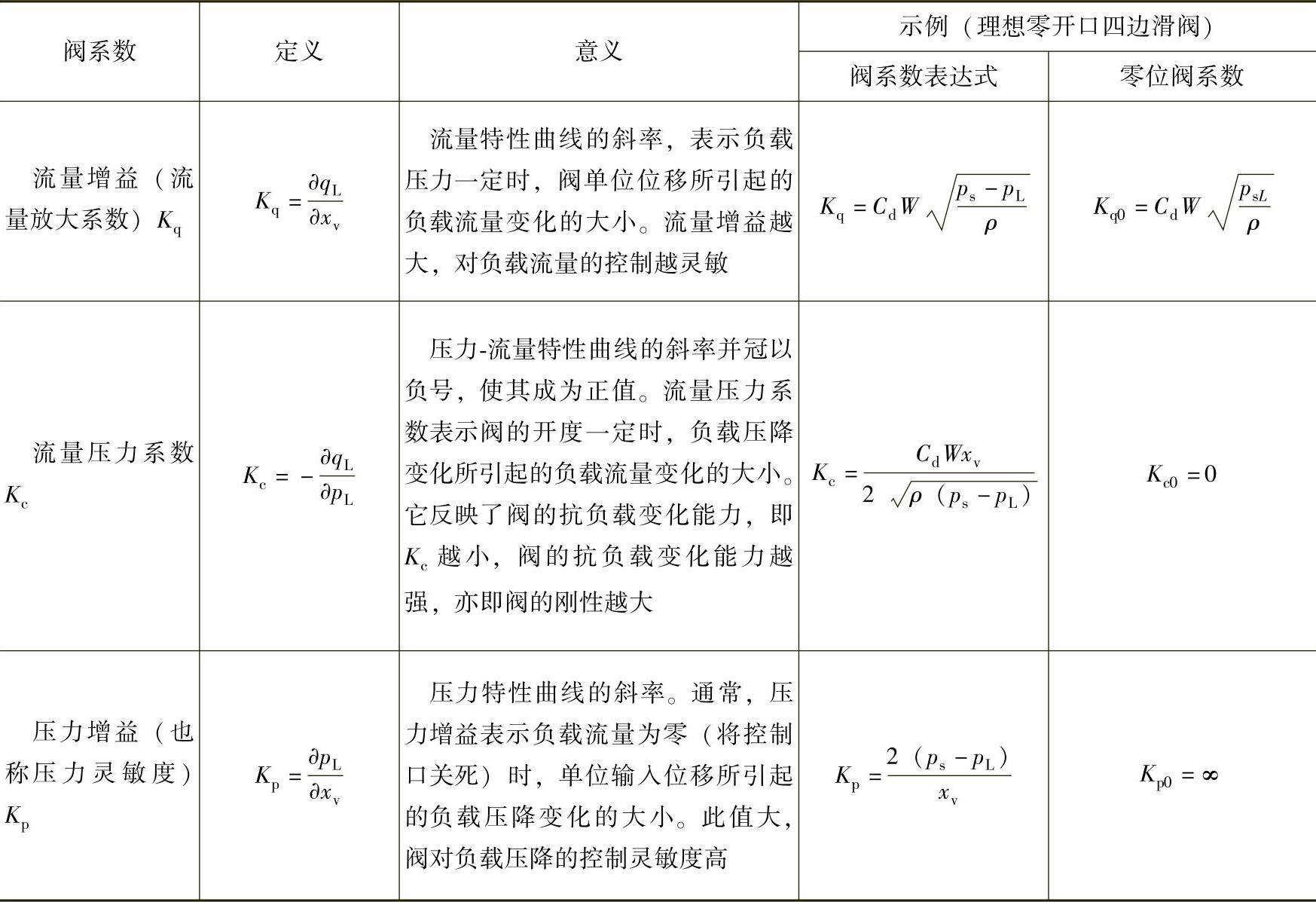
给出了此阀的三个阀系数表达式。根据阀系数的定义,式(3-9)可表示为
ΔqL=KqΔxv-KcΔpL (3-11)
伺服阀通常工作在零位附近,工作点在零位,其参数的增量也就是它的绝对值,因此阀方程式(3-11)也可以写成以下形式:
qL=Kqxv-KcpL (3-12)
(2)动态特性 电液伺服阀的动态特性可用频率响应(频域特性)或瞬态响应(时域特性)表示。
1)频率响应。频率响应是指输入电流在某一频率范围内作等幅变频正弦变化时,空载流量与输入电流的百分比。频率响应特性用幅值比(分贝)与频率及相位滞后(度)与频率的关系曲线[波德(Bode)图]表示(图3-120)。输入信号或供油压力不同,动态特性曲线也不同,所以,动态响应总是对应一定的工作条件,伺服阀产品名录通常给出±10%、±100%两组输入信号试验曲线,而供油压力通常规定为7MPa。
幅值比是某一特定频率下的输出流量幅值与输入电流之比,除以一指定频率(输入电流基准频率,通常为5周/s或10周/s)下的输出流量与同样输入电流幅值之比。相位滞后是指某一指定频率下所测得的输入电流和与其相对应的输出流量变化之间的相位差。
伺服阀的幅值比为-3dB(即输出流量为基准频率时输出流量的70.7%)时的频率定义为幅频宽,用ω-3或f-3表示;以相位滞后达到-90°时的频率定义为相频宽,用ω-90°或f-90°表示。由阀的频率特性可以直接查得幅频宽ω-3和相频宽ω-90°,应取其中较小者作为阀的频宽值。频宽是伺服阀动态响应速度的度量,频宽过低会影响系统的响应速度,过高会使高频传到负载上去。伺服阀的幅值比一般不允许大于+2dB。通常力马达喷嘴挡板式两级电液伺服阀的频宽在100~130Hz之间,动圈滑阀式两级电液伺服阀的频宽在50~100Hz之间,电反馈高频电液伺服阀的频宽可达250Hz,甚至更高。
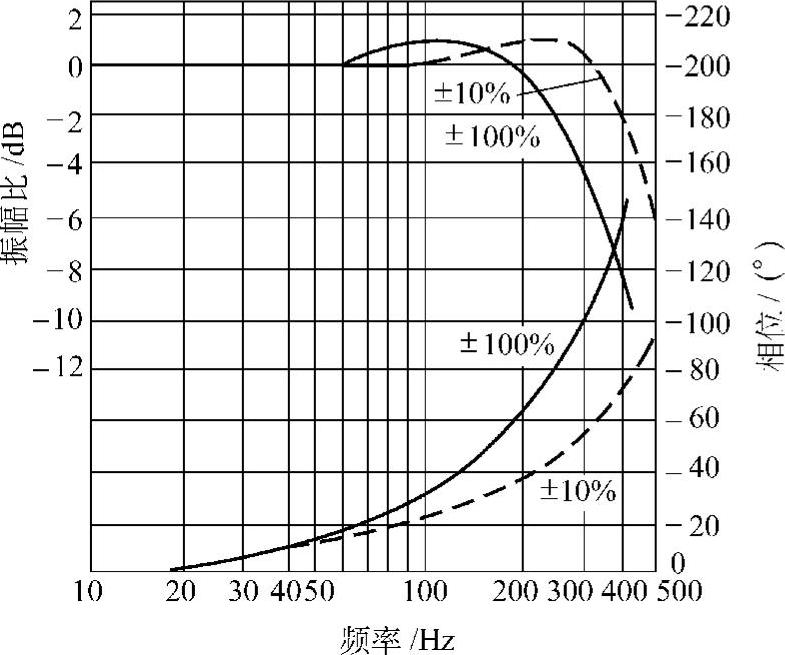
图3-120 伺服阀的频率响应特性曲线
2)瞬态响应。瞬态响应是指电液伺服阀施加一个典型输入信号(通常为阶跃信号)时,阀的输出流量对阶跃输入电流的跟踪过程中表现出的振荡衰减特性(图3-121)。反映电液伺服阀瞬态响应快速性的时域性能主要指标有超调量、峰值时间、响应时间和过渡过程时间。超调量Mp是指响应曲线的最大峰值E(tp1)与稳态值E(∞)的差;峰值时间tp1是指响应曲线从零上升到第一个峰值点所需要的时间。响应时间tr是指从指令值(或设定值)的5%到95%的运动时间;过渡过程时间是指输出振荡减小到规定值(通常为指令值的5%)所用的时间(ts)。
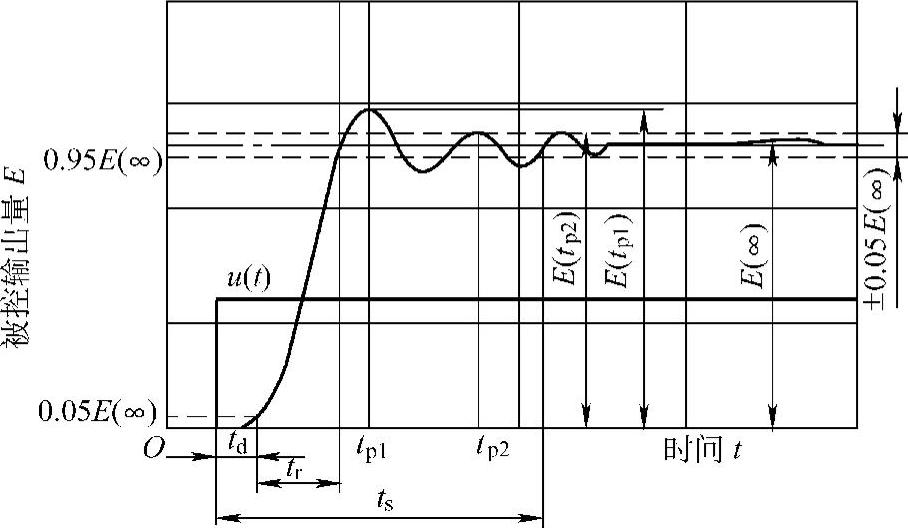
图3-121 伺服阀的瞬态响应特性曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。