



传统的电液伺服控制系统在工作中能量损失较大、对介质的污染非常敏感、制造精度要求很高、造价昂贵、出现故障时不易查找原因、管理维修费用奇高、对温度的变化也比较敏感。这些弊端极大地限制了传统电液伺服控制系统的应用和普及。近年来,伺服比例控制、数字控制等技术取得了许多新成就,但大都没有从根本上克服以上弊端。无阀电液伺服控制系统是近几年在国际液压技术界出现的一项技术革新成果,它克服了传统系统的某些缺陷,具有抗污染能力强、节能、造价低、可靠性高、安装连接简便等显著特点。
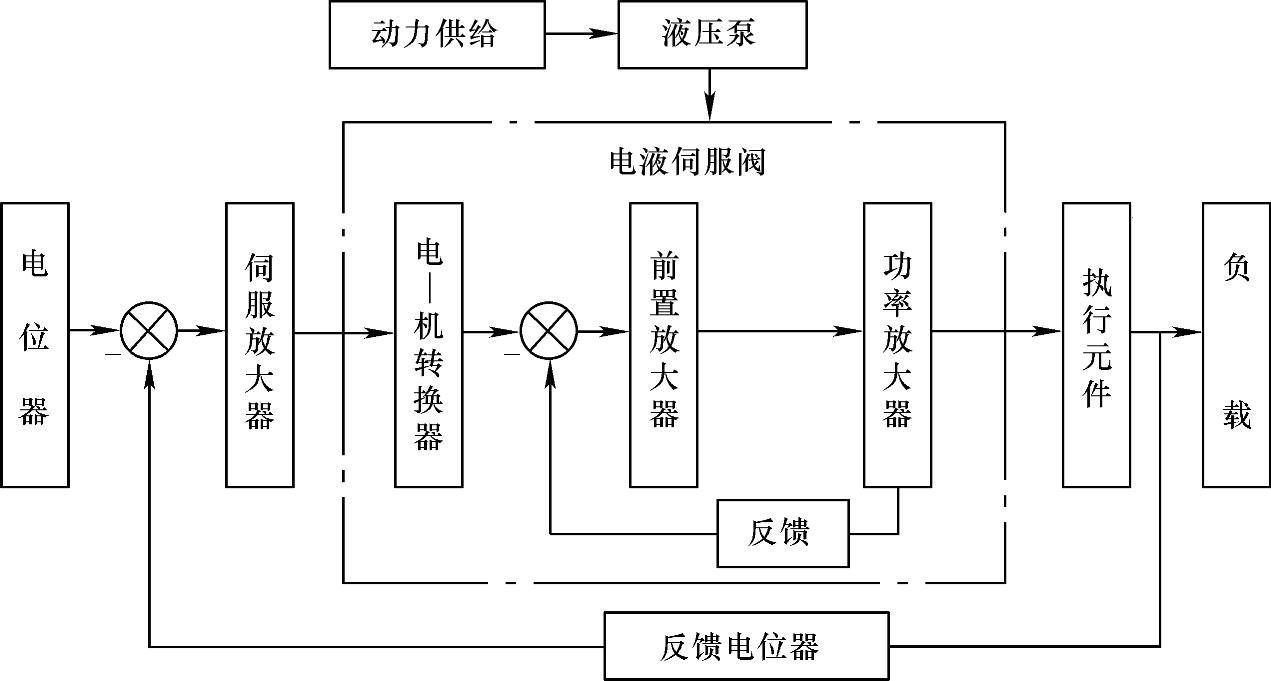
图2-36 典型闭环控制传统电液伺服阀系统原理方框图
1.两种系统控制方框图
图2-36所示为典型的闭环控制传统电液伺服阀系统原理方框图。可以看出,传统系统主要是用电液伺服阀控制执行元件来获得伺服动作,液压泵输出的液压能要经过繁琐的电器、机械位移转换,方能最终实现系统所要达到的方向、位置和速度的要求。由于电液伺服阀是高精密元件,对工作介质的清洁度要求非常苛刻,因此,其制造成本和使用成本都很高。
图2-37所示为典型无阀电液伺服系统原理方框图。可以看出,无阀系统采用交流伺服电动机直接驱动双向定量液压泵,由于充分发挥了交流伺服电动机的特性而不用电液伺服阀,因此克服了电液伺服阀给伺服系统带来的许多弊端,其制造成本和使用成本均大幅度下降,而且还可以很方便地将电动机、液压泵、油箱、执行元件、位置传感元件集成为一体,组成无阀电液伺服控制装置直接使用(图2-38)。由于交流伺服电动机可以直接实现变速、变向、限转矩,因此,无阀装置可以很方便地改变执行元件的运动方向、速度。闭环系统中,位置控制采用位移传感器进行反馈,控制精度可以得到有效保证。加之交流伺服电动机可以很方便地实现微型计算机控制,因此,在自动控制方面,无阀系统具有很强的适应性。通过改变控制程序,无阀装置可以很方便地得到正弦波、方波等特殊运动形式。

图2-37 典型无阀电液伺服系统原理方框图(https://www.xing528.com)
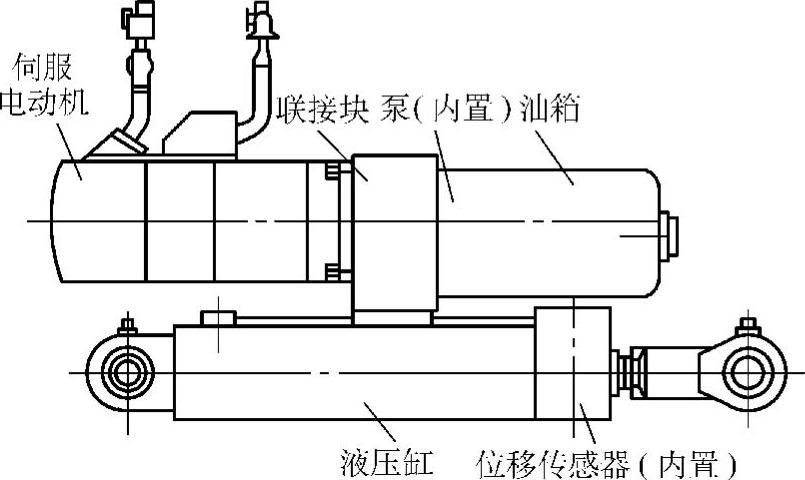
图2-38 典型无阀电液伺服装置外形图
2.两种电液伺服系统对比分析
两种电液伺服系统性能特点对比见表2-2。
表2-2 两种电液伺服系统性能特点对比
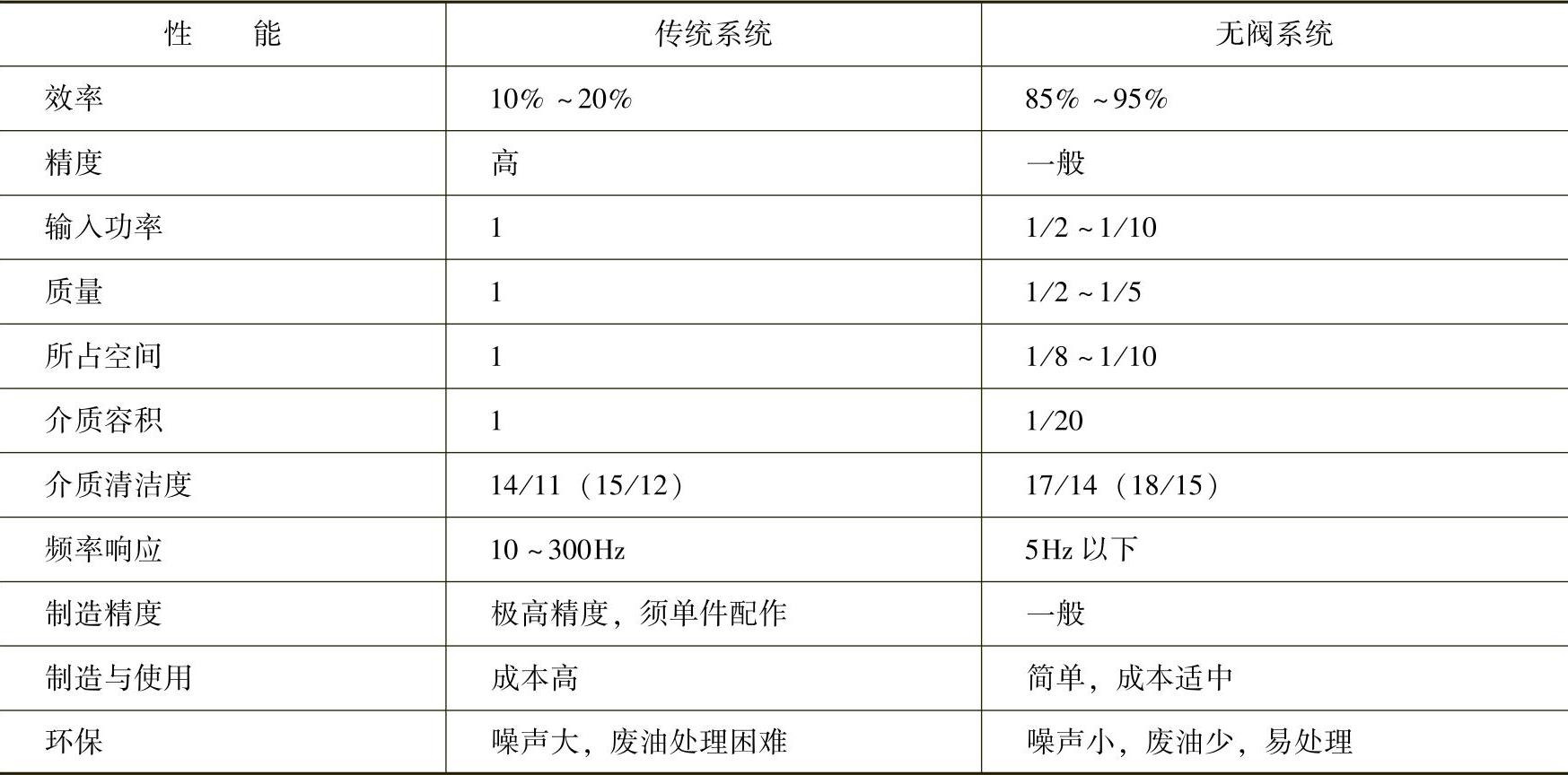
从表2-2中可以看出,传统系统在控制精度、频率响应两方面有着明显优势,但在实际工业应用中,2~5Hz的频响则完全可以满足大多数伺服系统的要求。在控制精度方面,传统系统要获得高控制精度,只有选零重叠(零开口)特性的伺服阀才可使系统获得满意的精度和稳定性。实际上,无阀系统在负载较为稳定的场合,通过对控制参数的合理调整,也可以实现较高控制精度。在其他方面,由于无阀系统具有高效、节能、小型集成化、操作安装简单等优点。近年来,无阀系统在国外生产的多种设备和生产装置上得到成功应用。根据无阀系统的特点,在船舶舵机控制、连铸钢液流量控制(结晶器液面控制)、阀门控制、六自由度仿真平台(模拟系统)、液压机器人(机械手)、水轮机调速系统、液压冲锻设备(多缸同步系统)、工程机械液压控制系统等几个方面,无阀系统可获得满意的使用效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。