



生产装置包括机器人、计算机数控设备、刚性自动化装置等。生产装置按照制造工序运行,如加工、装配、焊接、喷漆及其他增值工序,最后生产出一个完整的零件。
1.机器人
机器人在一个自动化系统中有多种功能,包括移动并定位零件等重复性动作和完成组装零件等生产任务。机器人擅长做重复性工作,动作快速而精确。机器人有多种驱动类型:电动、气动和液压驱动,每种类型的机器人都有各自的优点。气动机器人擅长简单的定位任务,如在装置间移动零件,气动机器人价格便宜,动作快速且精确,但是它们不擅长复杂的动作,而且能移动的位置有限;电动机器人在定位、焊接及许多其他任务上使用很多,动作快速且精确,但价格比较贵,图1-1所示为焊接机器人结构示意图;液压机器人擅长喷漆和其他重复性且繁重的工作,移动快速且平滑,适合用于防爆场合。
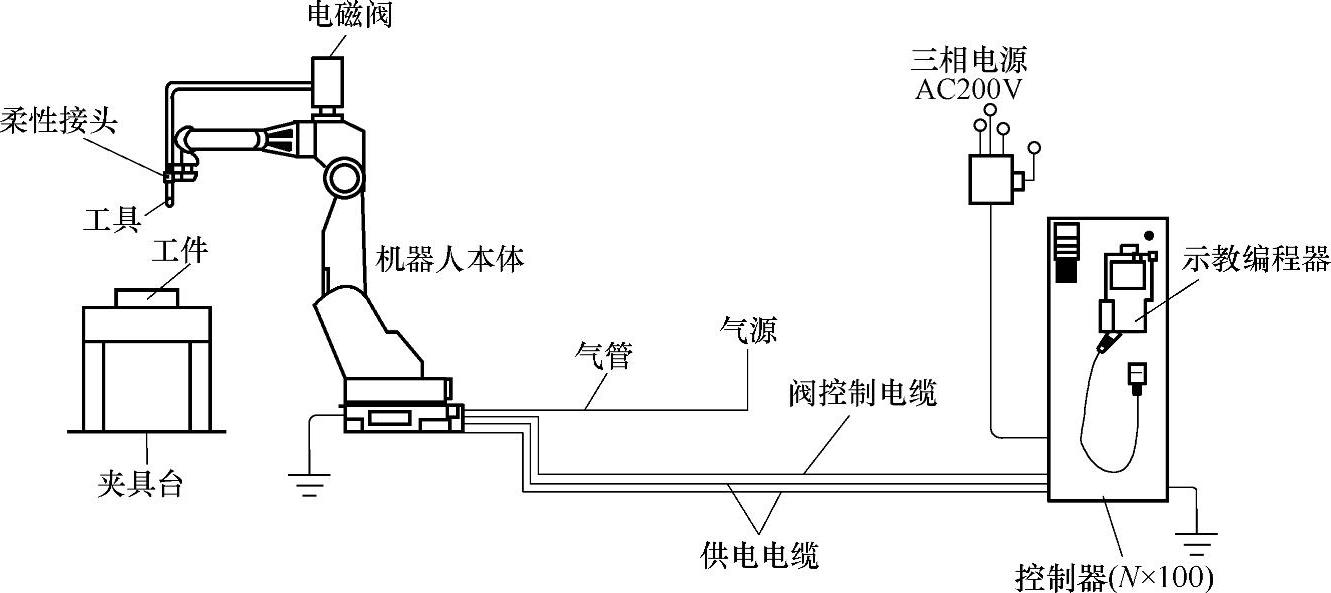
图1-1 焊接机器人结构示意图
机器人易于编程并集成在自动化控制系统中。许多机器人只是简单地移动到一个位置,用一个键来示教各个位置,其他机器人用专用的机器人编程语言来编程。机器人提供数字(开/关)输入和输出(I/O),这些输入和输出可以十分容易地连接到控制装置上,如PLC、计算机和其他控制器。图1-2所示为PLC控制机器人结构示意图。
2.计算机数控设备
计算机数控(CNC)设备是用计算机控制其运动和动作的设备,计算机技术的飞速发展使其得到了广泛应用。其最常见的CNC设备是数控车床和数字加工中心,其他的CNC设备还有电火花加工、线切割机等。CNC设备一般具有三个基本组成部分:控制器、驱动装置和机器本体。
CNC设备采用程序控制方式,而不再是硬件配线方式。CNC控制支持程序载入,并能对其进行编辑。最新的计算机控制是开放式PC控制,控制功能强大而且十分灵活,能够轻松接入工业以太网当中,许多设备的操作能完全按照预期目标来执行。
数控程序可以由手工编制,也可以由机器自动生成。常用的一种方法是借助于计算机辅助工艺过程设计(CAPP)。编程人员使用特殊的语言或通过屏幕键入方式描述程序结构和道具轨道,计算机将工具轨道翻译成数控语言,载入到CNC设备的控制器中。(https://www.xing528.com)

图1-2 PLC控制机器人结构示意图
另一种方法是采用传统的符号系统编写程序。在许多系统中,程序以机器语言的形式出现(像G编码语言和M编码程序),需要编程人员具有较强的编码机器语言基础。例如,G编码语言指令都有简单的代码和数字编程,其中代码告诉机器执行操作的类型,数字告诉机器移动的距离。如G01 X20F10这条指令表示加工刀具以10mm/min的速度沿着X轴移动20mm的距离。
CNC设备采用控制器(如PLC)执行闭环控制程序,并传送指令给驱动器,进而驱动伺服电动机的控制模式,其基本结构如图1-3所示。其中,闭环控制分为速度环路和位置环路,它们的作用是确保机器按照程序要求工作。
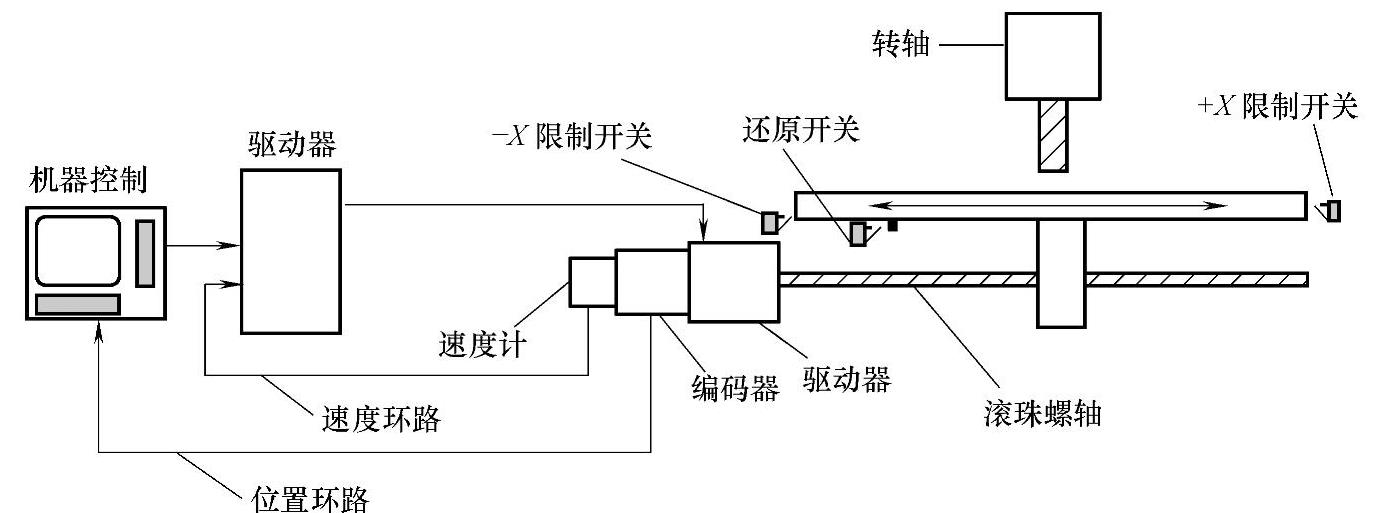
图1-3 数控系统进给轴伺服控制示意图
随着计算机性能和处理速度的不断提高,使不间断地检测机器运行速度和运行位置成为可能。如果运行中出现故障,机器本该移动却没有移动,计算机立即能够得到错误反馈信息并发出故障指令,这可以避免对机器造成更大的损坏。伺服电动机的优点是在系统中同时使用了动力和反馈机制,提高了主轴速度,提高了精确性和可重复性。
3.刚性自动化装置
刚性自动化装置通常是为一个特定的生产目标设计的,几乎没有灵活性。当刚性自动化装置生产的产品不再制造时,它一般就没用了。刚性自动化装置可设计用作生产装置或辅助装置。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。