



1.连续调节功能SFB 41/FB 41“CONT_C”
(1)简介
SFB/FB“CONT_C”(连续控制器)用于使用连续的I/O变量在SIMATIC S7控制系统中控制技术过程。可以通过参数打开或关闭PID控制器,以此来控制系统。通过参数赋值工具,可以很容易地做到这一点。调用:Start→SIMATIC→STEP 7→PID Control Parameter Assignment。在线电子手册,见Start→SIMATIC→Documentation→English→STEP 7-PID Control(见图6-76)。
(2)应用程序
可以使用控制器作为单独的PID定点控制器或在多循环控制中作为级联控制器、混合控制器和比例控制器使用。控制器的功能基于带有一个模拟信号的采样控制器的PID控制算法,如果必要的话,可以通过脉冲发送器(PULSEGEN)进行扩展,以产生脉冲宽度调制的输出信号,来控制比例执行机构的两个或3个步进控制器。
(3)说明
除了设定点操作和过程数值操作的功能以外,SFB 41/FB 41(CONT_C)可以使用连续的变量输出和手动影响控制数值选项,来实现一个完整的PID控制器。下面是关于SFB 41/FB 41(CONT_C)的详细的子功能说明:
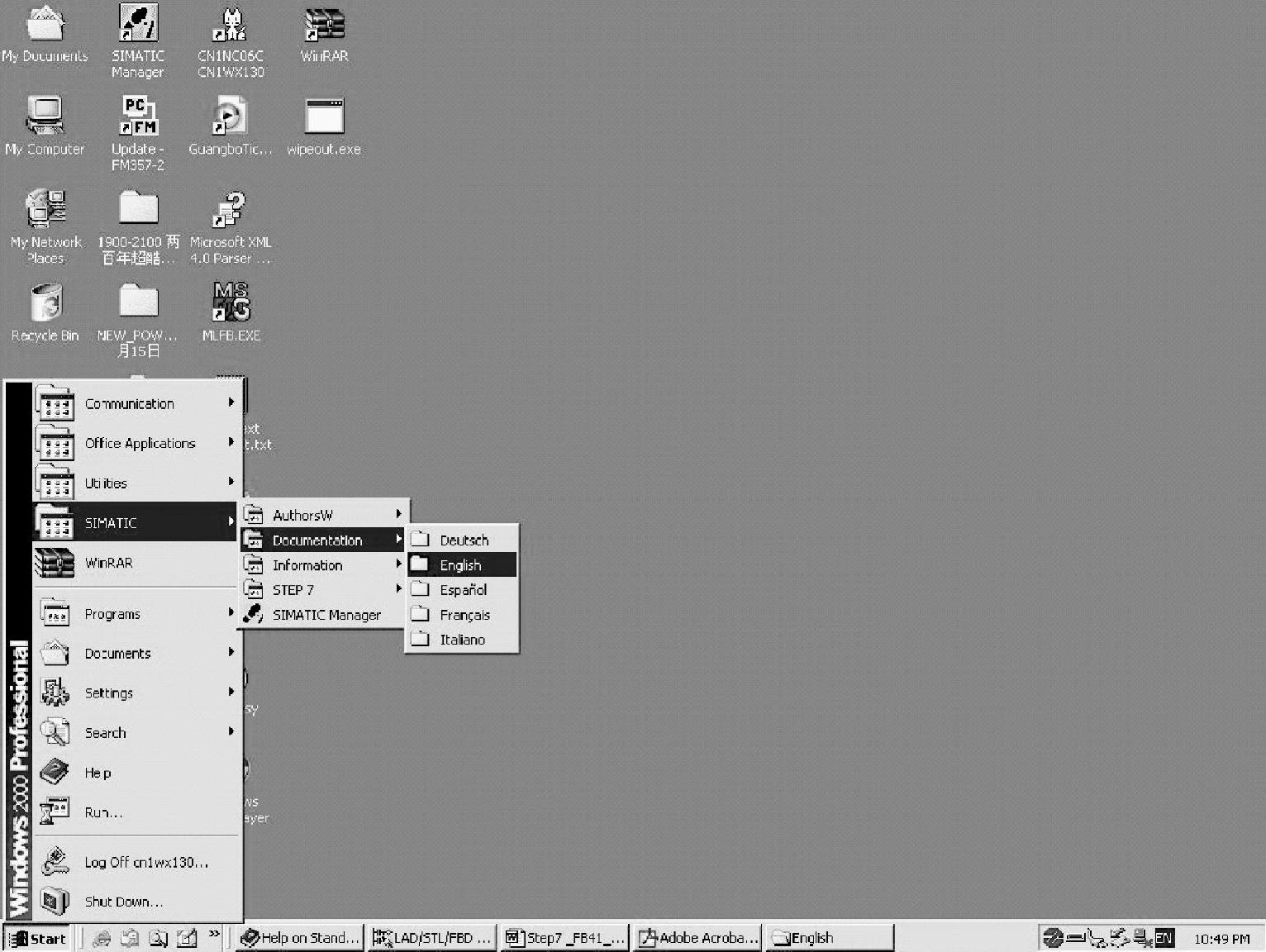
图6-76 打开在线电子手册
1)设定点操作:设定点以浮点格式在“SP_INT”端输入。
2)实际数值操作:
过程变量可以在外围设备(I/O)或者以浮点数值格式输入。“CRP_IN”功能可以将“PV_PER”外围设备数值转换为一个浮点格式的数值,在-100%~+100%之间,转换公式如下:
CPR_IN的输出=PV_PER×100/27648
“PV_NORM”功能可以根据下述规则标准化“CRP_IN”的输出:
输出PV_NORM=(CPR_IN的输出)×PV_FAC+PV_OFF
“PV_FAC”的默认值为“1”,“PV_OFF”的默认值为“0”。
变量“PV_FAC”和“PV_OFF”为下述公式转化的结果:
PV_OFF=(PV_NORM的输出)-(CPR_IN的输出)×PV_FAC
PV_FAC=(PV_NORM的输出-PV_OFF)/(CPR_IN的输出)
不必转换为百分比数值。如果设定点为物理确定,实际数值还可以转换为该物理数值。
3)负偏差计算:设定点和实际数值之间的区别便形成负值偏差。为了抑制由于被控量的量化引起的小的、恒定的振荡(例如使用PULSEGEN进行脉冲宽度调制),在死区将施加一个死区。如果DEADB_W=0,则死区将关闭。
4)PID算法:PID算法作为一种位置算法进行控制。比例运算、积分运算(INT)和微商运算(DIF)都可并行连接,也可以单独激活或取消。这就允许组态成P、PI、PD和PID控制器。也可以是纯I和D调节器。
5)手动模式:可以在手动模式和自动模式之间切换。在手动模式下,被控量被修改成手动选定的数值。
积分器(INT)内部设置为“LMN-LMN_P-DISV”,微商器(DIF)内部设置为“0”,并进行内部匹配。这就是说切换到自动模式时不会引起被控量的突变。
6)受控数值的处理:使用LMNLIMIT功能,受控数值可以被限制为一个所选择的数值。当输入变量超出极限值时,信号位将指示。“LMN_NORM”功能可以根据下述公式标准化“LMN-LIMIT”的输出:
LMN=(LMNLIMIT的输出)×LMN_FAC+LMN_OFF
“LMN_FAC”的默认值为“1”,“LMN_OFF”的默认值为“0”。
受控数值也适用于外围设备(I/O)格式。“CPR_OUT”功能可以将浮点值“LMN”转换为一个外围设备值,转换公式如下:
LMN_PER=LMN×2764/10
7)前馈控制:一个干扰变量被引入“DISV”端输入。
8)初始化:SFB 41/FB 41“CONT_C”有一个初始化程序,可以在输入参数COM_RST=TRUE置位时运行。在初始化过程中,积分器可以内部设置为初始值“I_ITVAL”。如果在一个循环中断优先级调用它,它将从该数值继续开始运行。所有其他输出都设置为其默认值。
9)出错信息:故障输出参数RET_VAL不使用。
10)SFB/FB“CONT_C”(连续调节控制器)框图如图6-77所示。
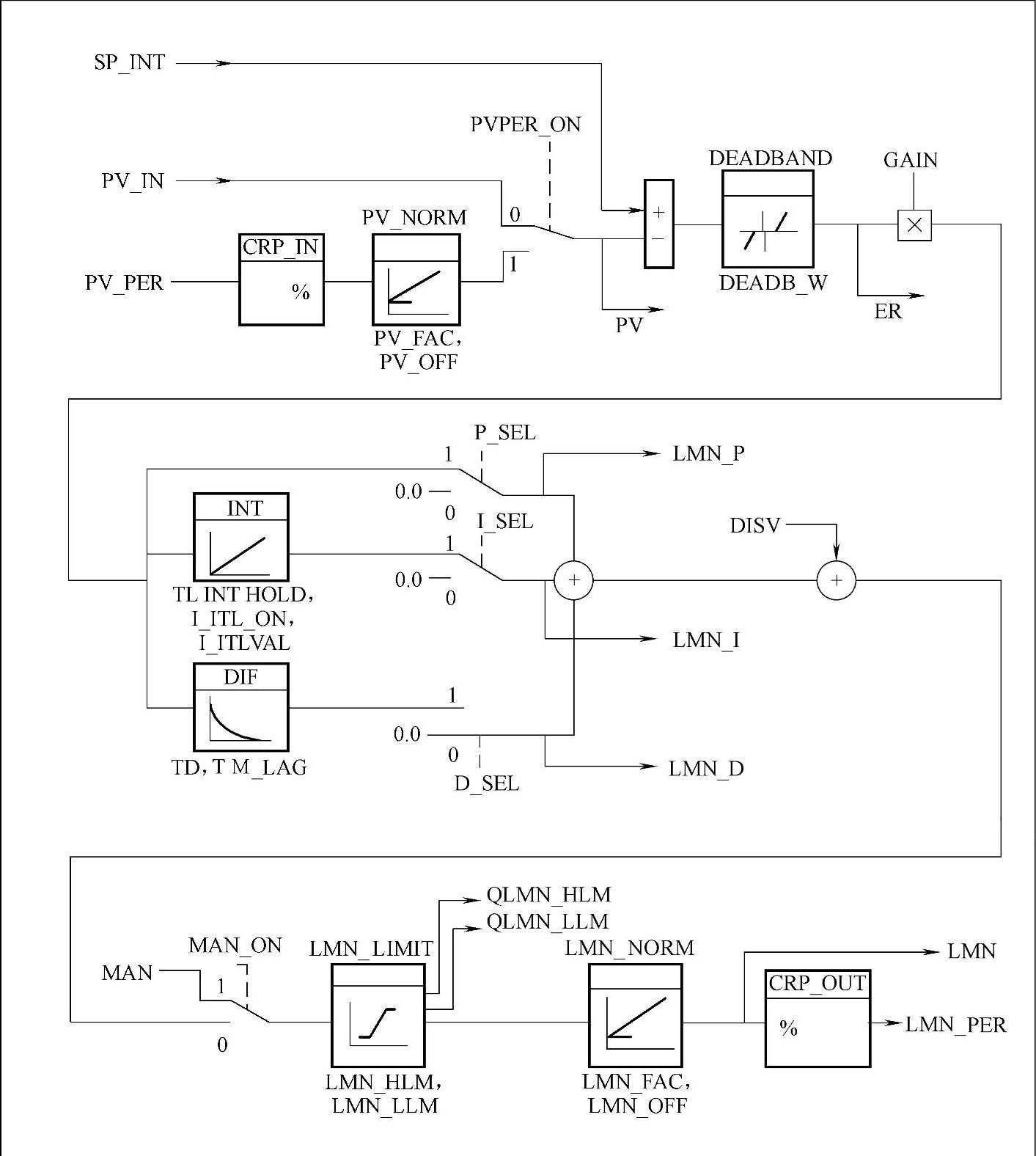
图6-77 SFB/FB“CONT_C”框图
11)输入参数:SFB 41/FB 41“CONT_C”如图6-78所示。
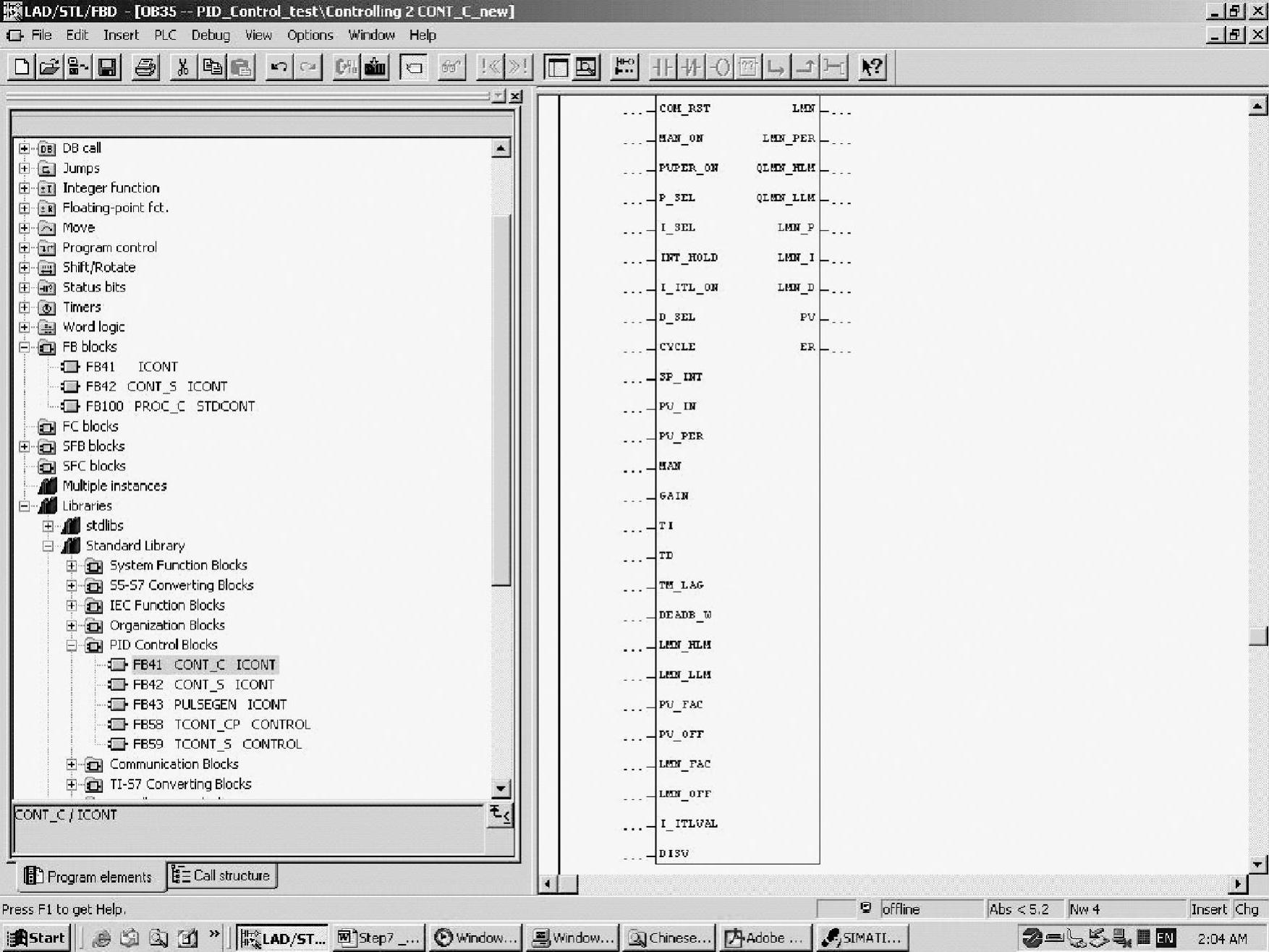
图6-78 输入参数SFB 41/FB 41“CONT_C”
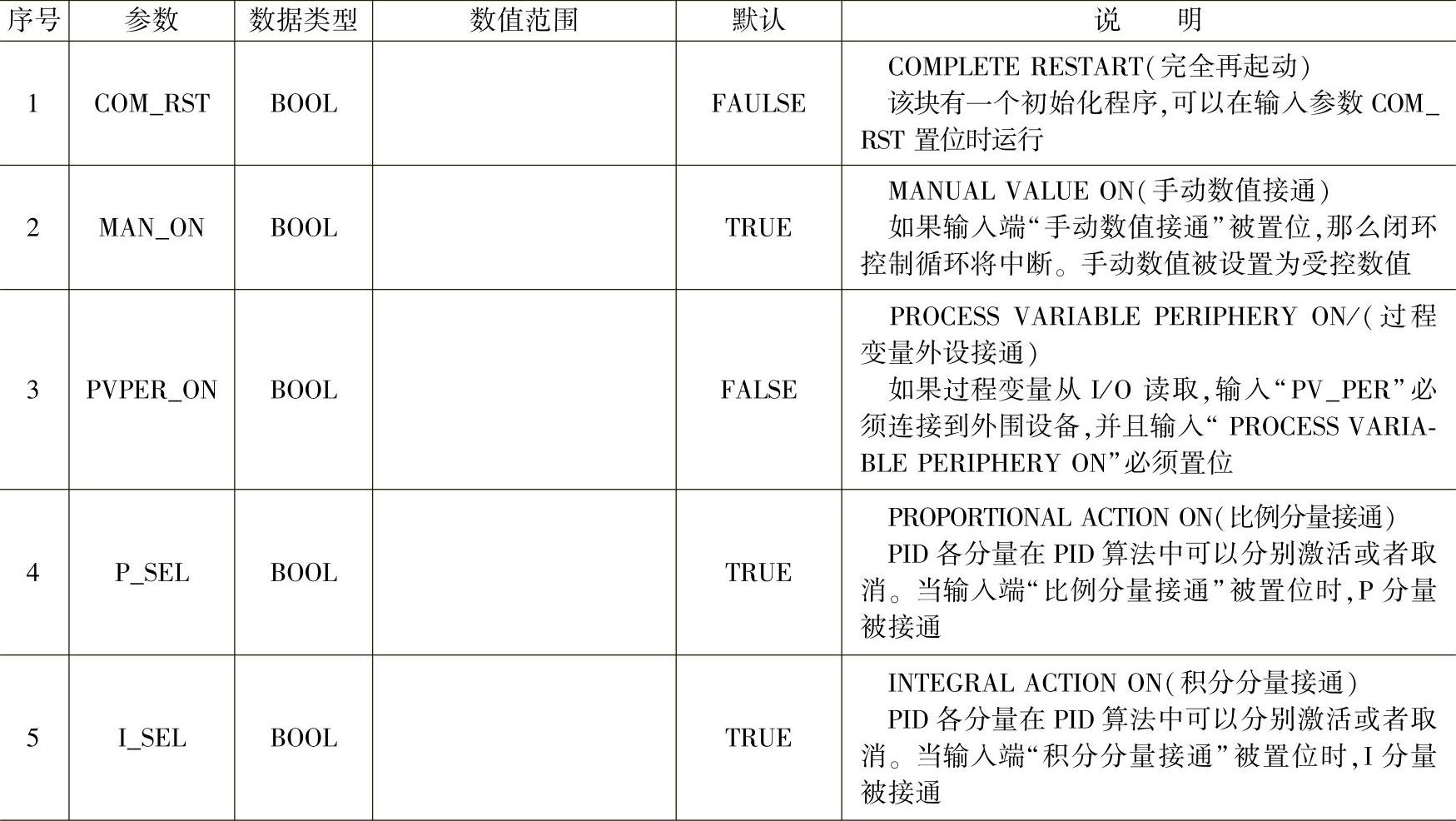
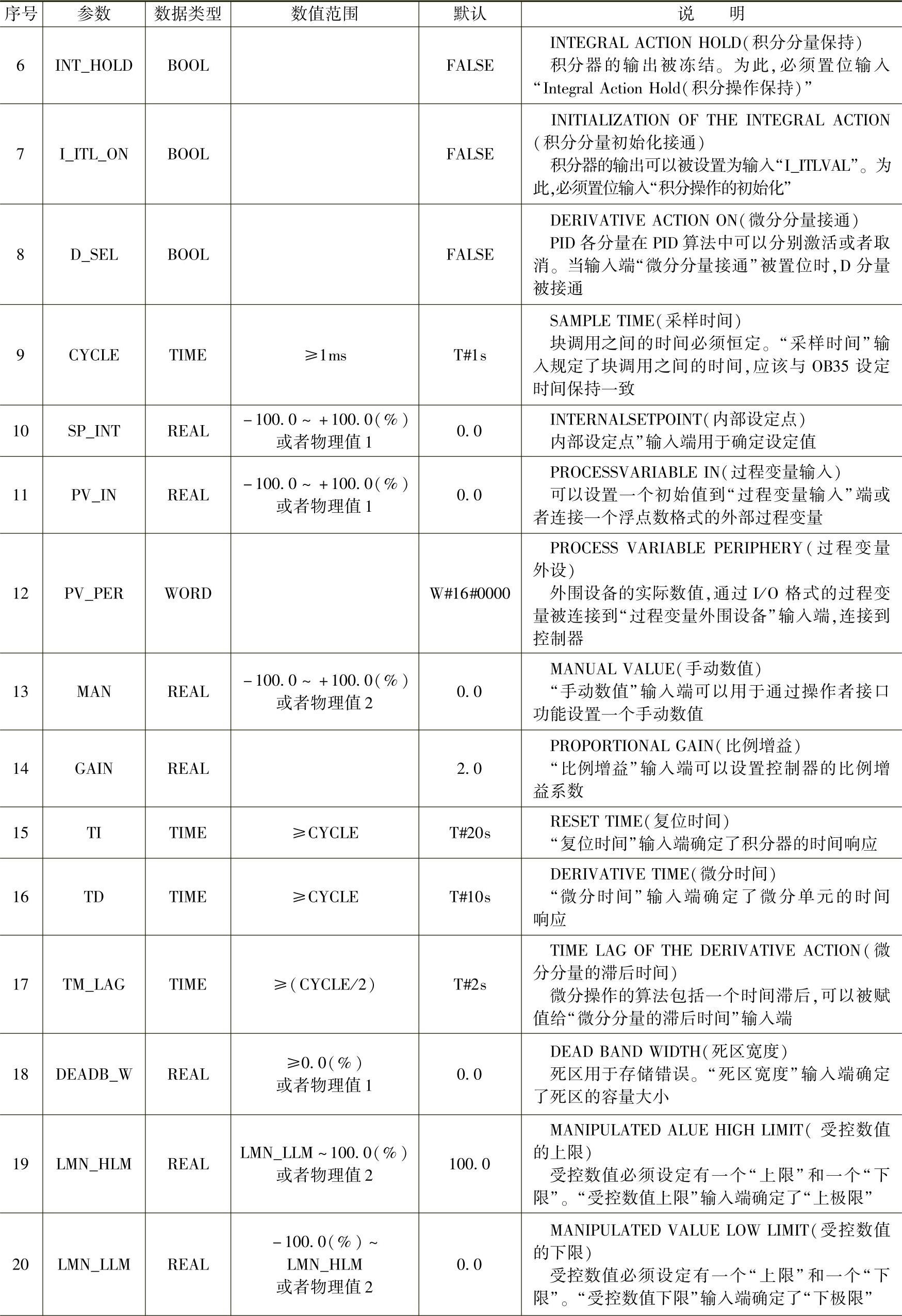
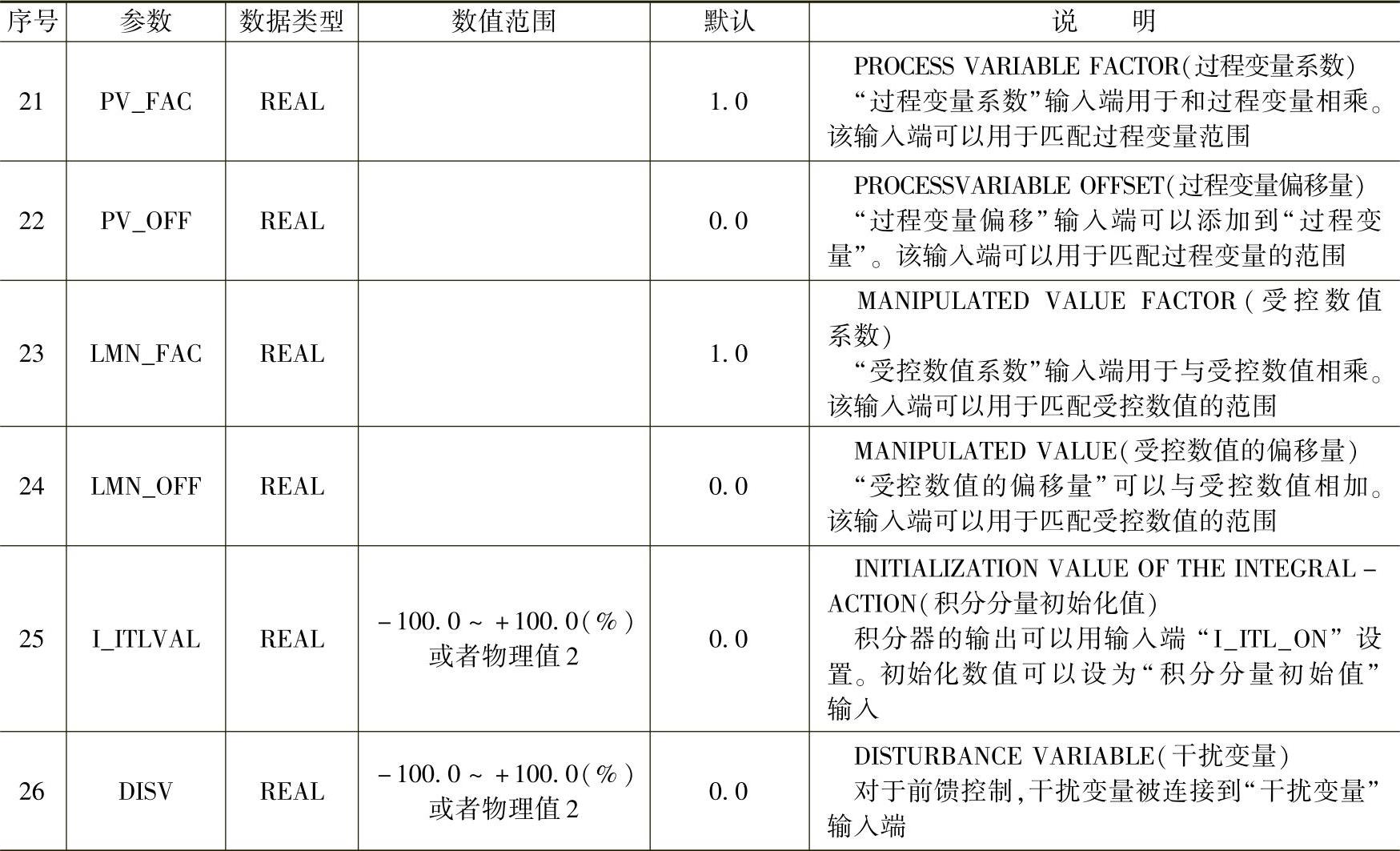
SFB 41/FB 41“CONT_C”输入参数的说明见表6-15。
表6-15SFB41/FB41“CONT_C”输入参数的说明
(续)
(续)
注:1.设定值通道”和“过程变量通道”中的参数,应该有相同的单位。例如,如果使用PV_IN作为“过程物理值”或者“过程物理值百分比”,SP_INT必须使用相同的单位;如果使用PV_PER作为外围设备的实际数值,SP_INT只能使用“-100.0~+100.0(%)”作为设定值。如果设定值是SP_INT是0~10MPa中的8MPa,那么需要填写0.8,PV_PER填写硬件外设地址IW XXX。
2.受控量通道中的参数应该有相同的单位。
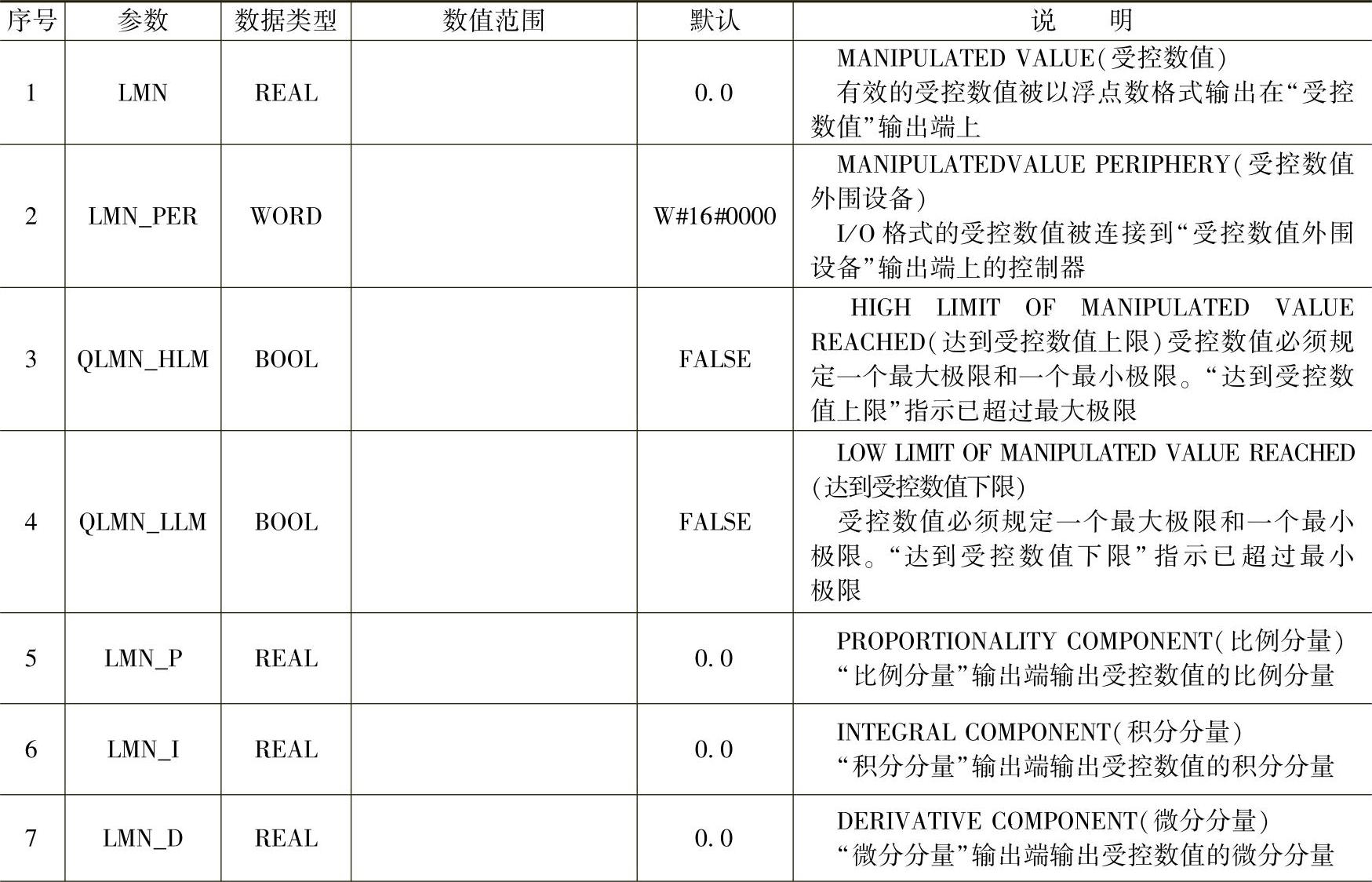
12)输出参数:SFB 41/FB 41“CONT_C”输出参数的说明见表6-16。
表6-16SFB41/FB41“CONT_C”输出参数的说明
(续)

2.步进控制功能SFB 42/FB 42“CONT_S”
(1)简介
SFB/FB“CONT_S”(步进控制器)用在SIMATIC S7 PLC上,用于二进制数控数值输出信号积分执行机构的控制技术过程。在参数赋值过程中,可以激活或取消PI步进控制器的子功能,以使控制器与过程匹配。通过参数赋值工具,可以很容易地做到这一点。调用:Start→SIMATIC→STEP 7→PID Control Parameter Assignment。在线电子手册,见Start→SIMATIC→Documentation→English→STEP 7-PID Control。
(2)应用程序
可以使用该控制器作为单独的PI固定设定值控制器,或者在辅助控制循环(第二级闭环)中作为级联控制器、混合控制器或者比例控制器使用,但是不能用作主控制器(第一级调节器)。控制器的功能根据采样控制器的PI控制算法实现,由模拟执行信号生成二进制输出信号。
下列功能适用于CPU 314 IFM的FB V1.5或V1.1.0以上版本:
利用TI=T#0ms,可以封锁调节器的积分分量。因此,允许功能块用作比例(P)控制器。
由于控制器不使用任何位置反馈信号,内部计算的受控变量将不能准确地匹配信号控制元件的位置。如果受控变量(ER∗GAIN)为负值,应进行调整。然后调节器置位输出端QLMNDN(受控量信号低),直到LMNR_LS(位置反馈信号下限)被置位。
控制器还可以在一个控制器级联中用作一个辅助控制器(第二个执行器)。设定点输入端“SP_INT”用于赋值控制元件的位置。在这种情况下,实际数值输入和参数“TI(积分时间)”必须被设置为“0”。一个应用实例如下:通过电控阀瓣控制温度,即借助二进制脉冲数值输出信号来控制热量输出的温度调节和利用阀门控制制冷容量。在这种情况下,为了关闭全部阀门,受控变量(ER∗GAIN)应该有一个负值。
(3)说明
除了过程数据通道的功能外,SFB/FB“CONT_S”(步进控制器)可以使用一个数字受控数值输出和手动影响控制数值选项,来实现一个完整的PI控制器。步进控制器不使用位置反馈信号。限位信号可以用于限制脉冲输出。下面是详细的子功能说明:
1)设定点操作:设定点以浮点数格式在“SP_INT”输入端上输入。
2)实际数值操作:过程变量可以在外围设备(I/O)或以浮点数格式输入。“CRP_IN”功能可以将“PV_PER”外围设备数值转换为一个浮点数格式的数值,在-100%~+100%之间,转换公式如下:
CPR_IN的输出=PV_PER×100/27648
“PV_NORM”功能可以根据下述公式标准化“CRP_IN”的输出:
PV_NORM的输出=(CPR_IN的输出)×PV_FAC+PV_OFF
PV_FAC的默认值为“1”,PV_OFF的默认值为“0”。
变量“PV_FAC”和“PV_OFF”为下述公式转化的结果:
PV_OFF=(PV_NORM的输出)-(CPR_IN的输出)×PV_FAC
PV_FAC=(PV_NORM的输出-PV_OFF)/(CPR_IN的输出)
3)负偏差计算:设定点和实际数值之间的区别便形成负值偏差。为了抑制由于受控变量的量化造成的小的、恒定的振荡(例如,由于执行机构阀门引起的受控数值的波动),为负偏差设置了一个死区。如果DEADB_W=0,则死区将被关闭。
4)PI步进算法:SFB/FB“CONT_S”(步进控制器)不使用位置反馈信号。PI算法的积分操作和假定位置反馈信号都在积分器(INT)中计算,并作为一个反馈值与剩余P操作进行比较。比较差被用于一个三步元件(THREE_ST)和一个脉冲发生器(PULSEOUT),以生成执行机构的控制脉冲。控制器的开关频率可以通过在三步元件上采用阈值控制来减少。
5)前馈控制:一个干扰变量被引入“DISV”输入端。
6)初始化操作:SFB/FB“CONT_S”(步进控制器)有一个初始化程序,可以在输入参数COM_RST=TRUE置位时运行。所有其他输出端都设置为其默认值。
7)出错信息:故障输出参数RET_VAL不使用。
8)SFB/FB“CONT_S”(步进控制器)框图如图6-79所示。
9)输入参数:SFB 42/FB 42“CONT_S”如图6-80所示。
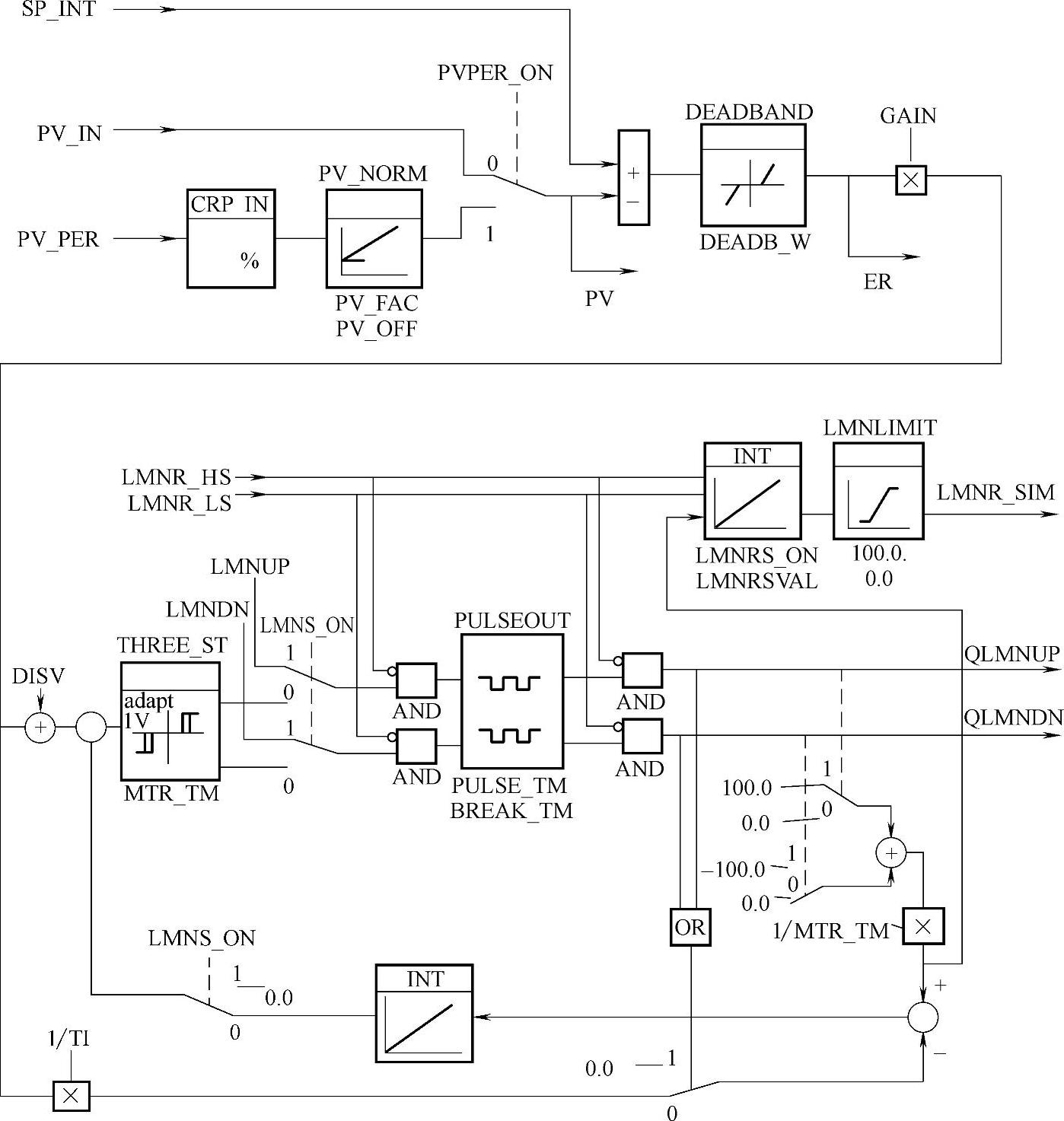
图6-79 SFB/FB“CONT_S”框图
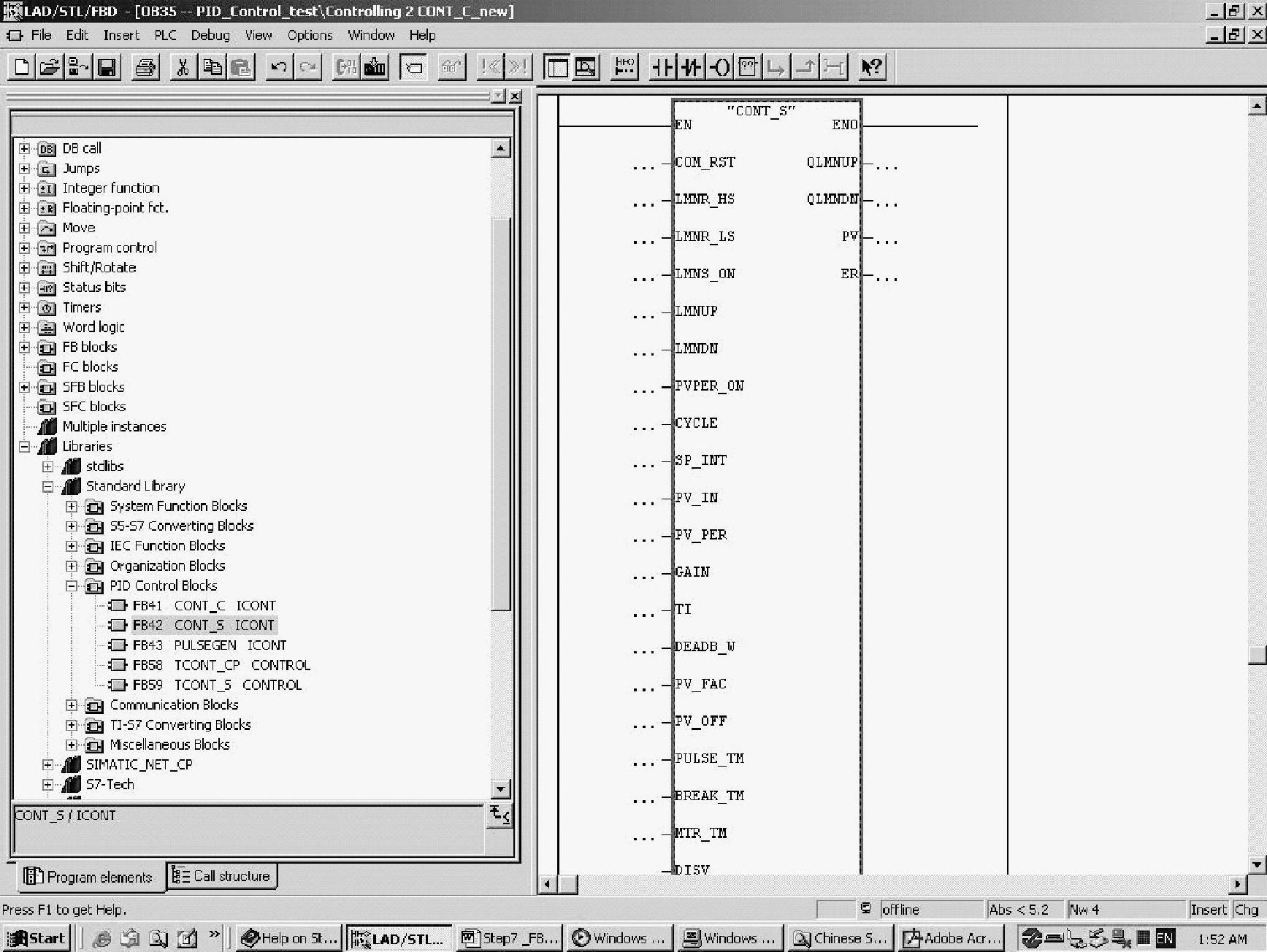
图6-80 输入参数SFB 42/FB 42“CONT_S”
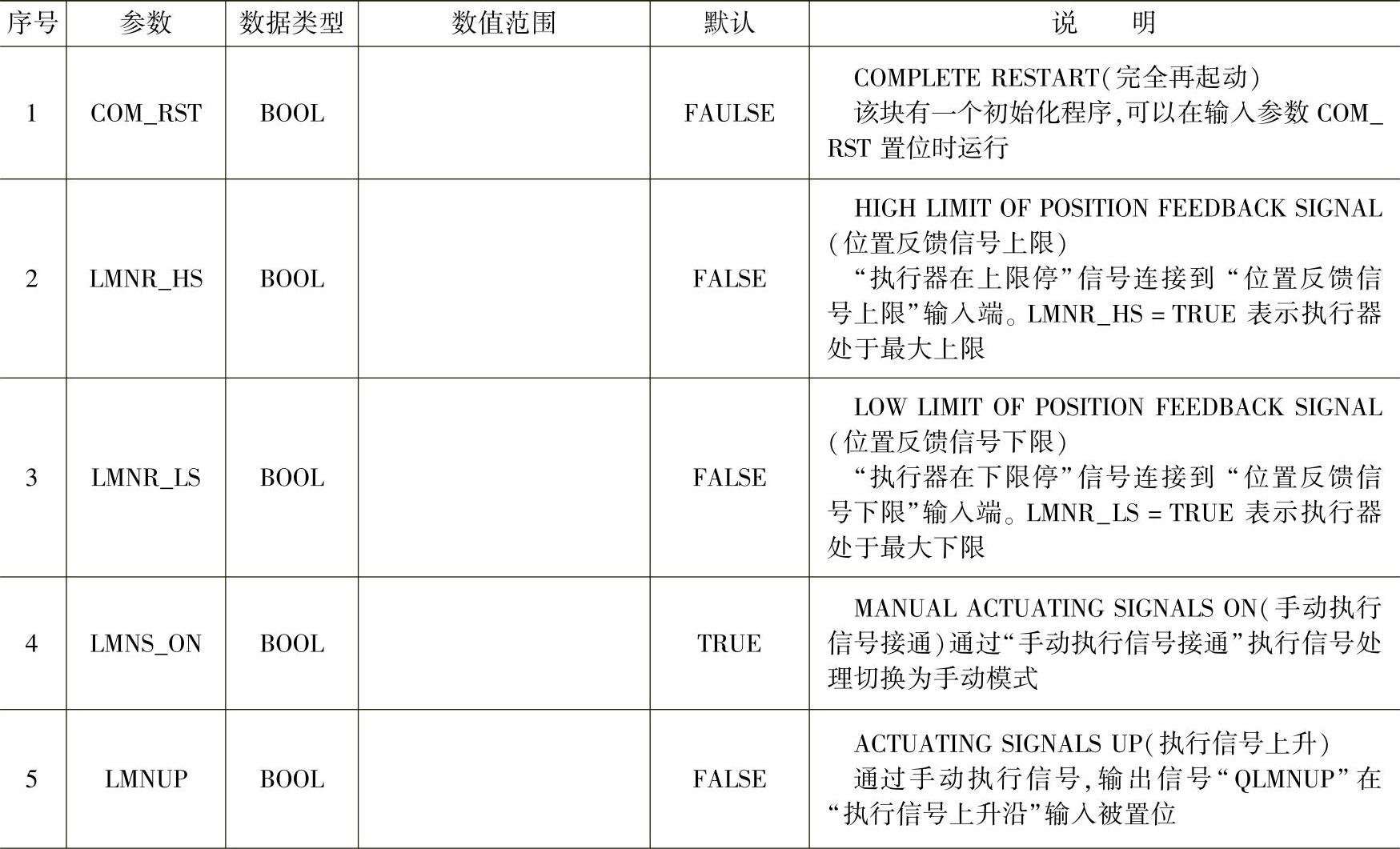
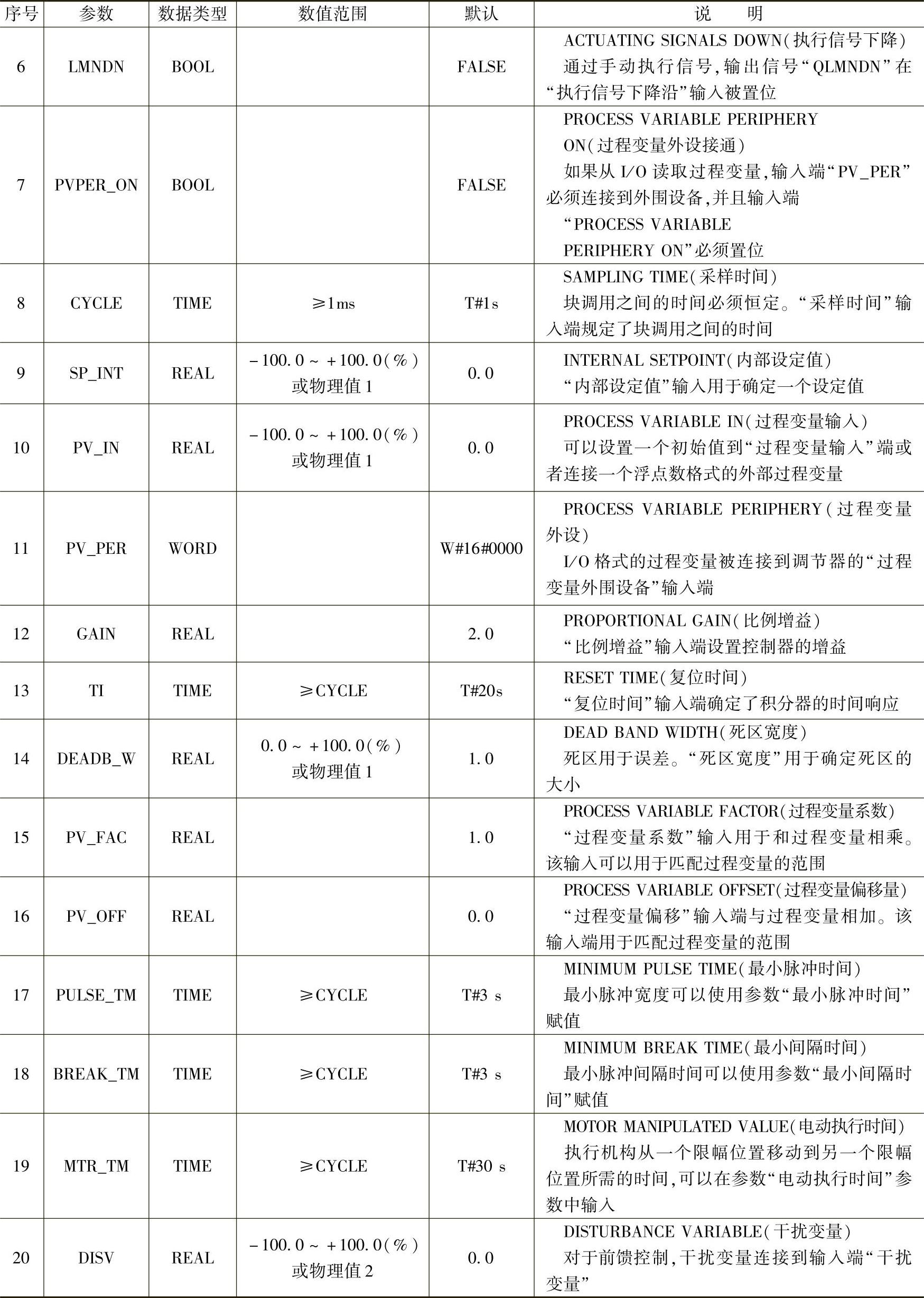
SFB 42/FB 42“CONT_S”输入参数的说明见表6-17。
表6-17SFB42/FB42“CONT_S”输入参数的说明
(续)
注:1.“设定值通道”和“过程变量通道”中的参数,应该有相同的单位。
2.受控量通道中的参数应该有相同的单位。
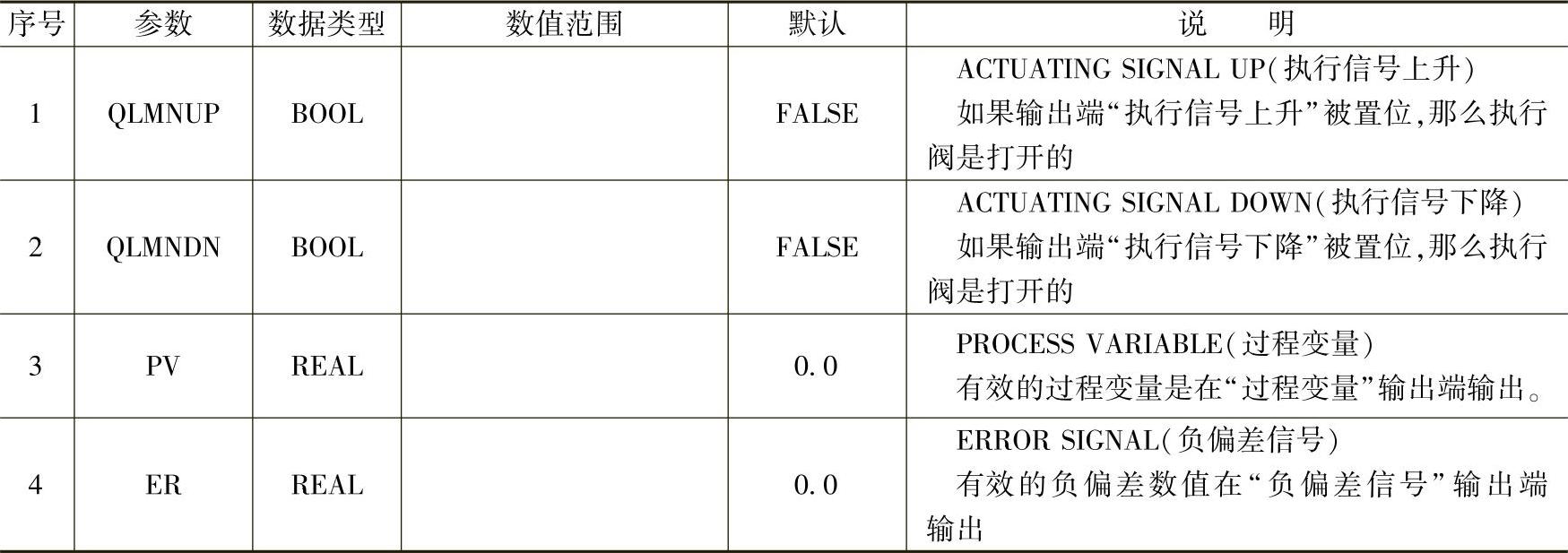
10)输出参数:SFB 42/FB 42“CONT_S”输出参数的说明见表6-18。(https://www.xing528.com)
表6-18SFB42/FB42“CONT_S”输出参数的说明
3.脉冲宽度调制器SFB 43/FB 43“PULSEGEN”
(1)简介
SFB/FB“PULSEGEN”(脉冲发生器)可以用于为PID控制器使用比例执行机构的脉冲输出。在线电子手册,见Start→SIMATIC→Documentation→English→STEP 7-PID Control。
(2)应用程序
使用SFB/FB“PULSEGEN”(脉冲发生器),可以通过脉冲宽度调制,组态PID两步或三级控制器。该功能一般与连续控制器SFB/FB“CONT_C”一起使用(见图6-81)。
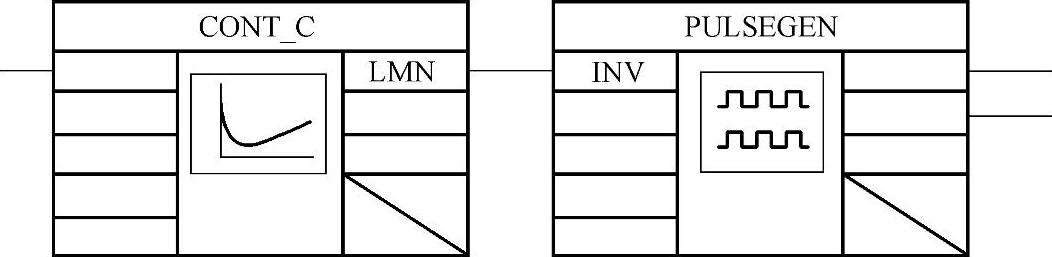
图6-81 PULSEGEN与CONT_C一起使用
(3)说明
“PULSEGEN”可以通过调制脉冲宽度,将输入变量“INV”(=PID控制器的LMN)转换为一个恒定周期的脉冲串,该恒定周期相当于输入变量刷新的循环时间,必须在“PER_TM”中赋值。
每个周期的脉冲宽度与输入变量成正比。“PER_TM”中的循环时间与SFB/FB“PULSEG-EN”的处理时间不同。“PER_TM”循环时间由多个SFB/FB“PULSEGEN”执行循环之和。因此,每个“PER_TM”循环的SFB/FB“PULSEGEN”调用次数是脉冲宽度,可以精确测量脉冲宽度。最小受控数值在参数“P_B_TM”中确定(见图6-82)。
1)脉冲宽度调制:
输入变量30%以及每个PER_TM循环时间调用SFB/FB“PULSEGEN”10次,含义如下:
•对于前3个SFB/FB“PULSEGEN”(10次调用的30%),输出“QPOS”为“1”;
•对于其余7个SFB/FB“PULSEGEN”(10次调用的70%),输出“QPOS”为“0”。
2)SFB/FB“PULSEGEN”块图如图6-83所示。
3)受控数值的精度:如果“采样频率比例”为1∶10(“CONT_C”调用与“PULSEGEN”调用之比),那么在这个例子中受控数值的精度降低为10%。换句话说,设定的输入数值“INV”只能在“QPOS”输出端上以“10%”的步长转换成脉冲宽度。
只有当每次“CONT_C”调用中“PULSEGEN”调用的次数增加时,才能提高精度。
例如,如果每个“CONT_C”调用的“PULSEGEN”调用次数为100,受控数值的分辨率将达到1%(建议分辨率≤5%)。
注意:“采样频率比例”必须由用户编程。
4)自动同步:可以使刷新输入变量“INV”的块(例如,“CONT_C”),与脉冲输出自动同步。这就保证了输入变量中的一个变化可以尽可能快地输出为一个脉冲。
脉冲发生器可以根据“PER_TM”的周期为时间间隔,定期评价输入数值“INV”,并将该数值转换为相应长度的脉冲信号。
但是,由于“INV”一般在较慢的循环中断级中计算,所以脉冲发生器应在“INV”刷新后尽可能快地将具体数值转换为一个脉冲信号。
为此,块必须使用下述程序对周期的起点同步:
如果“INV”变化,并且块调用不在一个周期的第1个或最后两个调用循环中,可以进行同步。将重新计算脉冲宽度,并在下一个循环中输出一个新的周期(见图6-84)。
自动同步可以根据“SYN_ON”(=FALSE)输入关闭。
注意:在一个周期的开始,“INV”(即LMN)的先前数值的映像将被或多或少的混合到脉冲信号中。
5)PID控制器输出工作模式:根据脉冲发生器所赋值的参数,可以将PID调节器组态成具有一个三级输出或者一个两向或单向的两极输出PID控制器。可能模式的开关组合设置见表6-19。
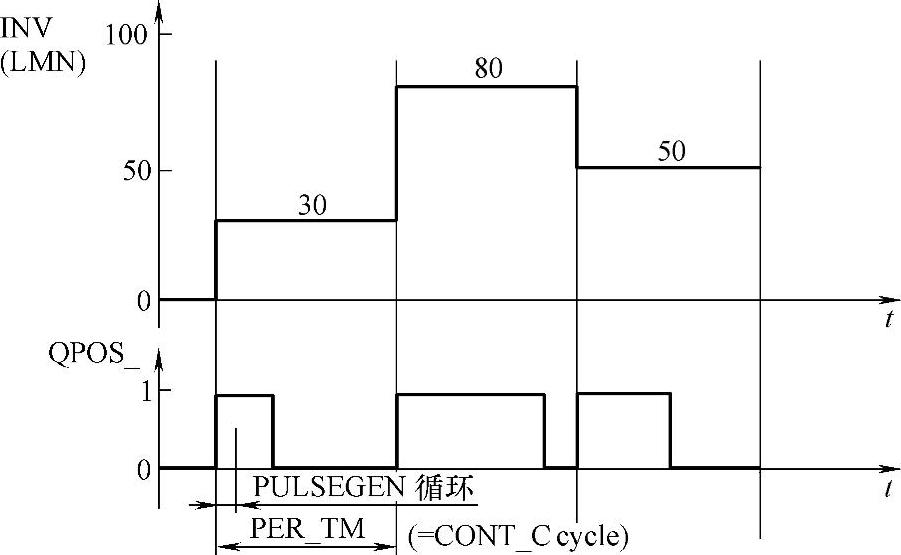
图6-82 PULSEGEN的使用
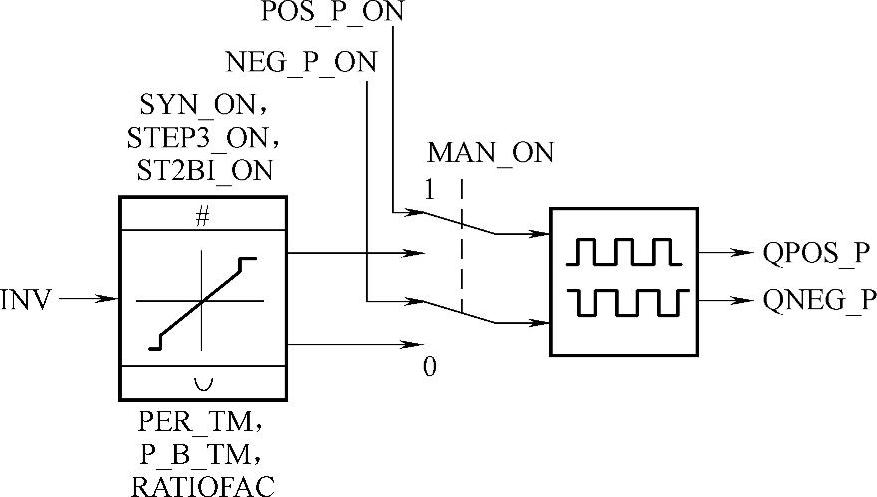
图6-83 SFB/FB“PULSEGEN”块图
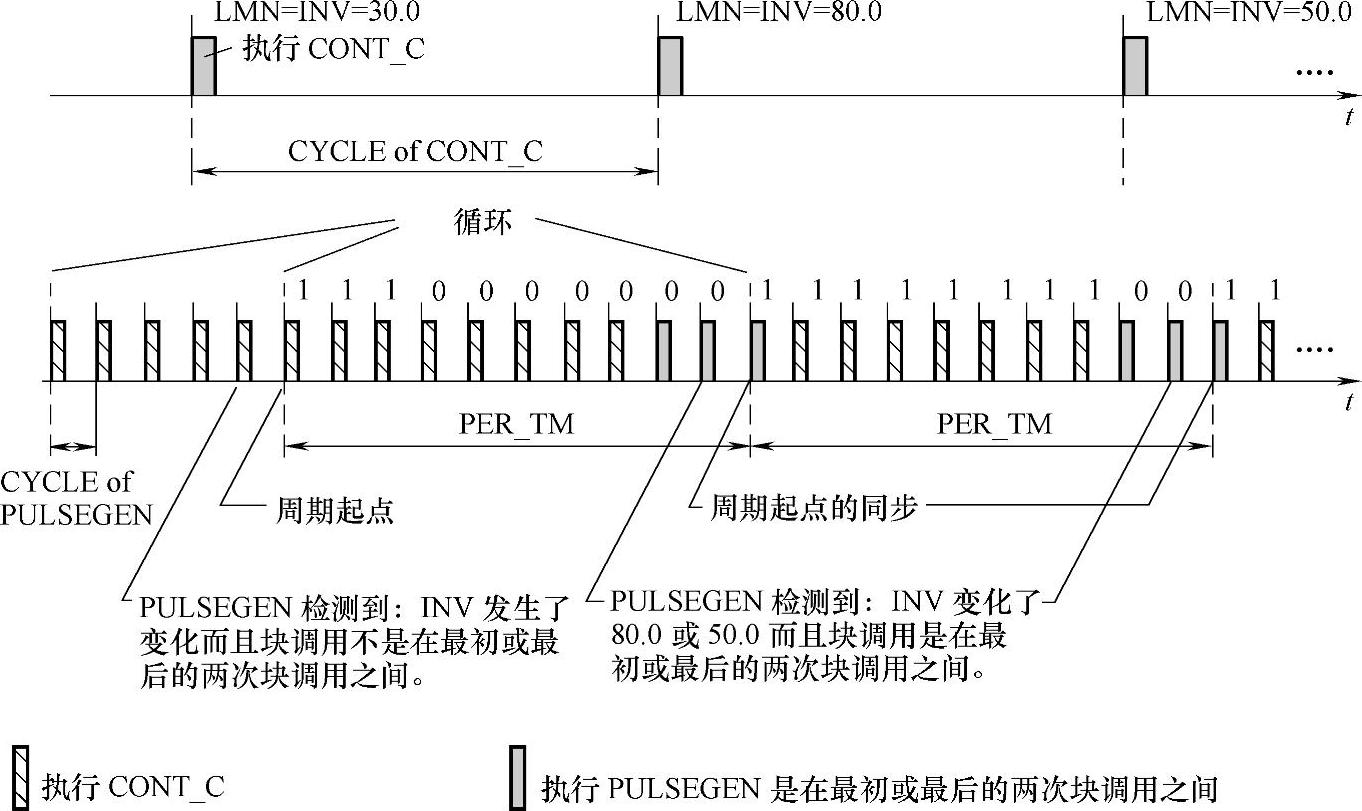
图6-84 同步周期的起点
表6-19 可能模式的开关组合设置

(4)三级控制
在“三级控制”模式下,可以生成控制信号的三种状态。二进制输出信号“QPOS_P”和“QNEG_P”的数值可以赋值给执行机构的状态。
温度控制的例子见表6-20。
表6-20 温度控制的例子

根据输入变量,使用一个特性曲线可以计算脉冲宽度。特性曲线的形状取决于最小脉冲时间或最大中断时间和比例系数。
比例系数的正常值为“1”。
曲线中的“拐点”是由于最小脉冲时间或最小中断时间造成的。
最小脉冲或最小间隔时间
正确赋值最小脉冲或最小中断时间“P_B_TM”,可以防止短促的开断时间,以防降低开关元件和执行机构的使用寿命。
注意:否则,会删除一个短于“P_B_TM”脉冲宽度的输入变量“LMN”的较小绝对值。可以生成脉冲宽度大于“PER_TM-P_B_TM”的较大输入值被设置为100%或-100%。
正脉冲宽度和负脉冲宽度可以根据输入变量(单位[%])和周期时间相乘进行计算。
脉冲周期=INV/100×PER_TM
图6-85所示为一个三级控制器的系统曲线(比例系数=1)。
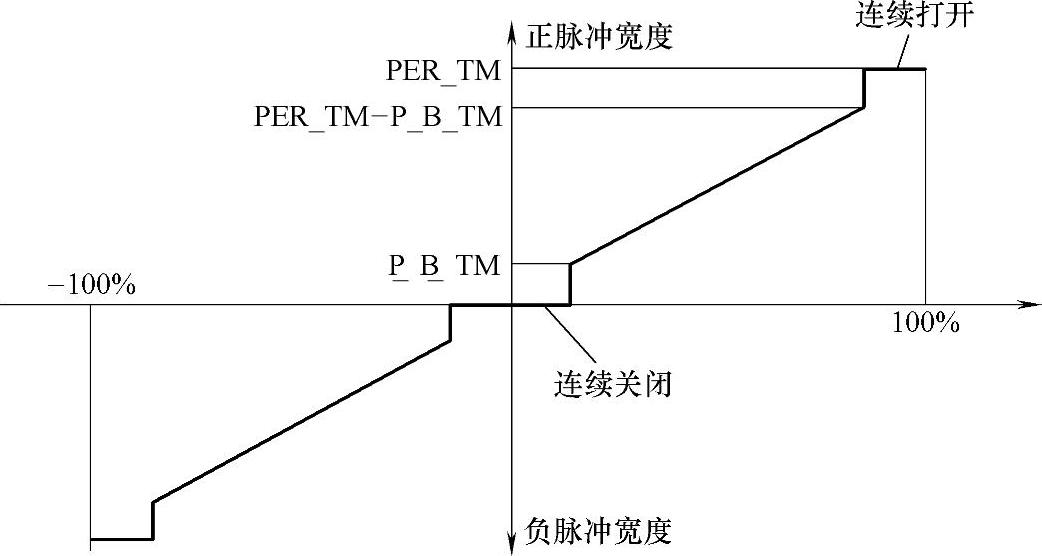
图6-85 三级控制器的系统曲线(比例系数=1)
使用比例系数“RATIOFAC”,可以改变正脉冲宽度和负脉冲宽度之比。例如,对于热处理,可用不同的时间常数加热和冷却执行机构。
比例系数也会影响最小脉冲/暂停周期。比例系数<1是指负脉冲的阈值乘以比例系数。
比例系数<1
通过输入数值乘以脉冲周期所计算的比例系数,可以减少负脉冲输出的脉冲周期。
正脉冲周期=INV/100×PER_TM
负脉冲周期=INV/100×PER_TM x RATIOFAC
图6-86所示为一个三级控制器的系统曲线(比例系数=0.5)。
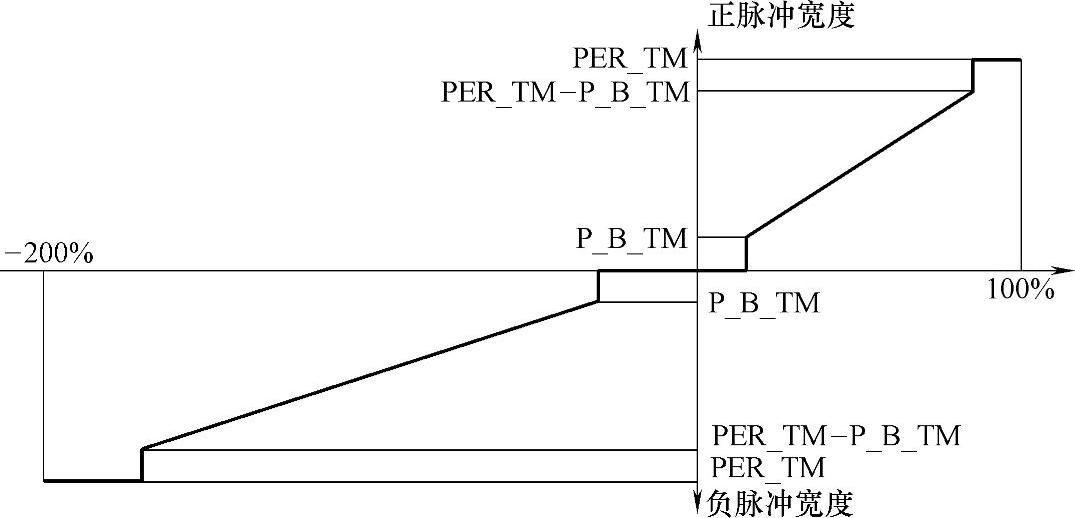
图6-86 三级控制器的系统曲线(比例系数=0.5)
比例系数>1
通过输入数值乘以脉冲周期所计算的比例系数,可以减少正脉冲输出的脉冲周期。
负脉冲周期=INV/100×PER_TM
正脉冲周期=INV/100×PER_T/RATIOFAC
(5)二级控制
对于二级控制,只能将PULSEGEN的正脉冲输出“QPOS_P”连接到I/O执行机构。根据所使用的受控数值范围,二级控制器可以有一个双极或单极受控数值范围。
两级调节,带双向调节区(-100%~+100%)如图6-87所示。
两级调节,带单向调节区(0~+100%)如图6-88所示。
如果控制循环中二级控制器的连接需要一个执行脉冲的逻辑转换二进制信号,可以在“QNEG_P”将输出信号进行“非”运算。
二级控制或三级控制中的手动模式
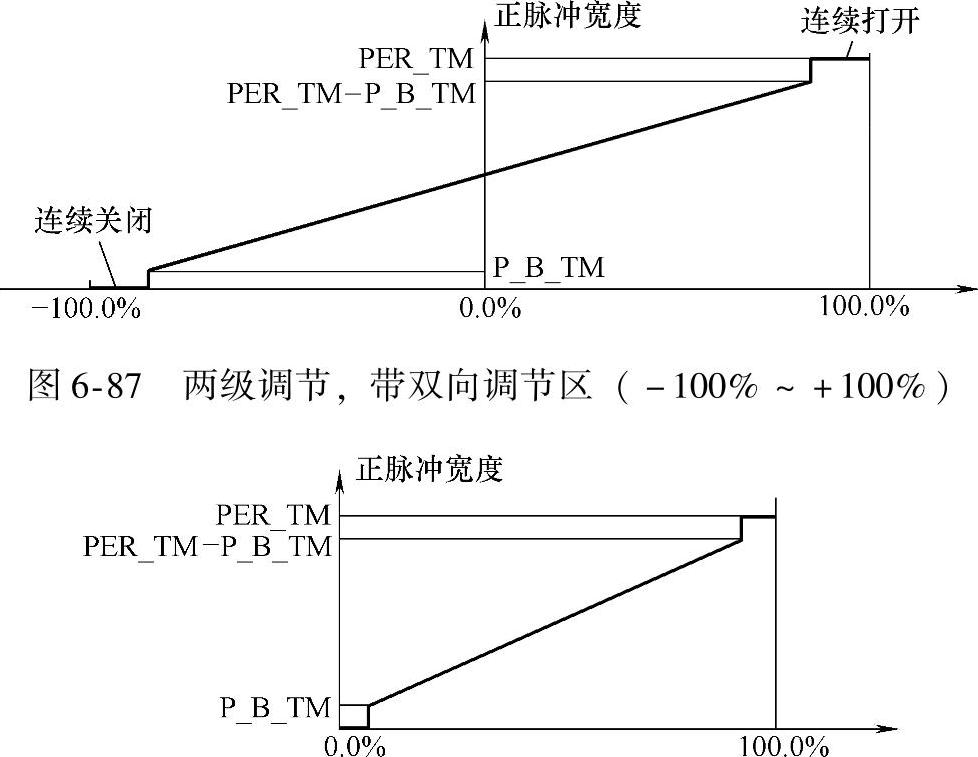
图6-88 两级调节,带单向调节区(0~+100%)
在手动模式(MAN_ON=TRUE)中,三级控制器或二级控制器的二进制输出可以使用信号“POS_P_ON”和“NEG_P_ON”以及“INV”进行设置。
1)初始化:SFB“PULSGEN”有一个初始化程序,可以在输入参数COM_RST=TRUE置位时运行。所有信号都被设置为“0”。
2)出错信息:故障输出参数RET_VAL不使用。
3)输入参数:SFB 43/FB 43“PULSEGEN”如图6-89所示。
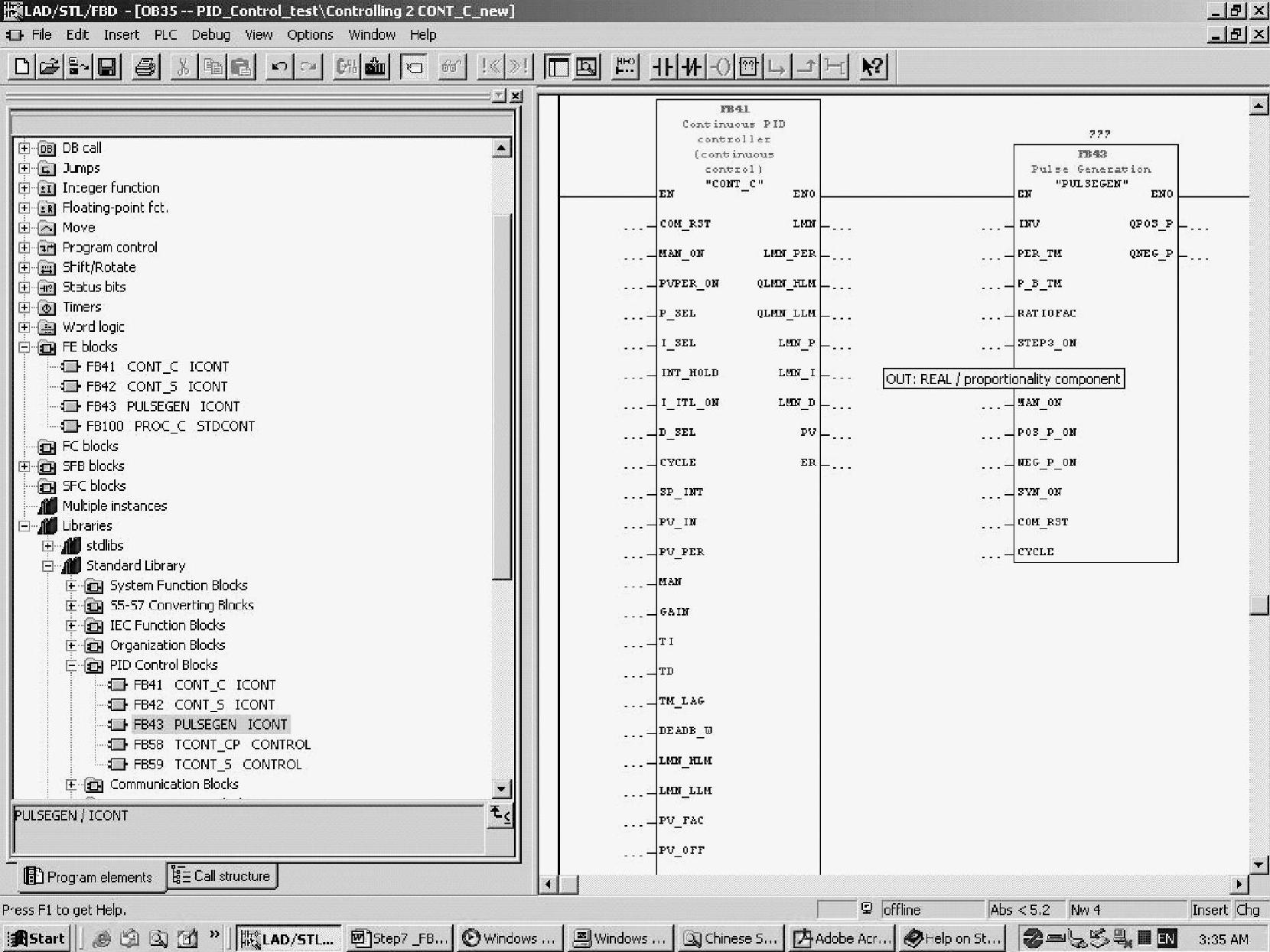
图6-89 输入参数:SFB 43/FB 43“PULSEGEN”
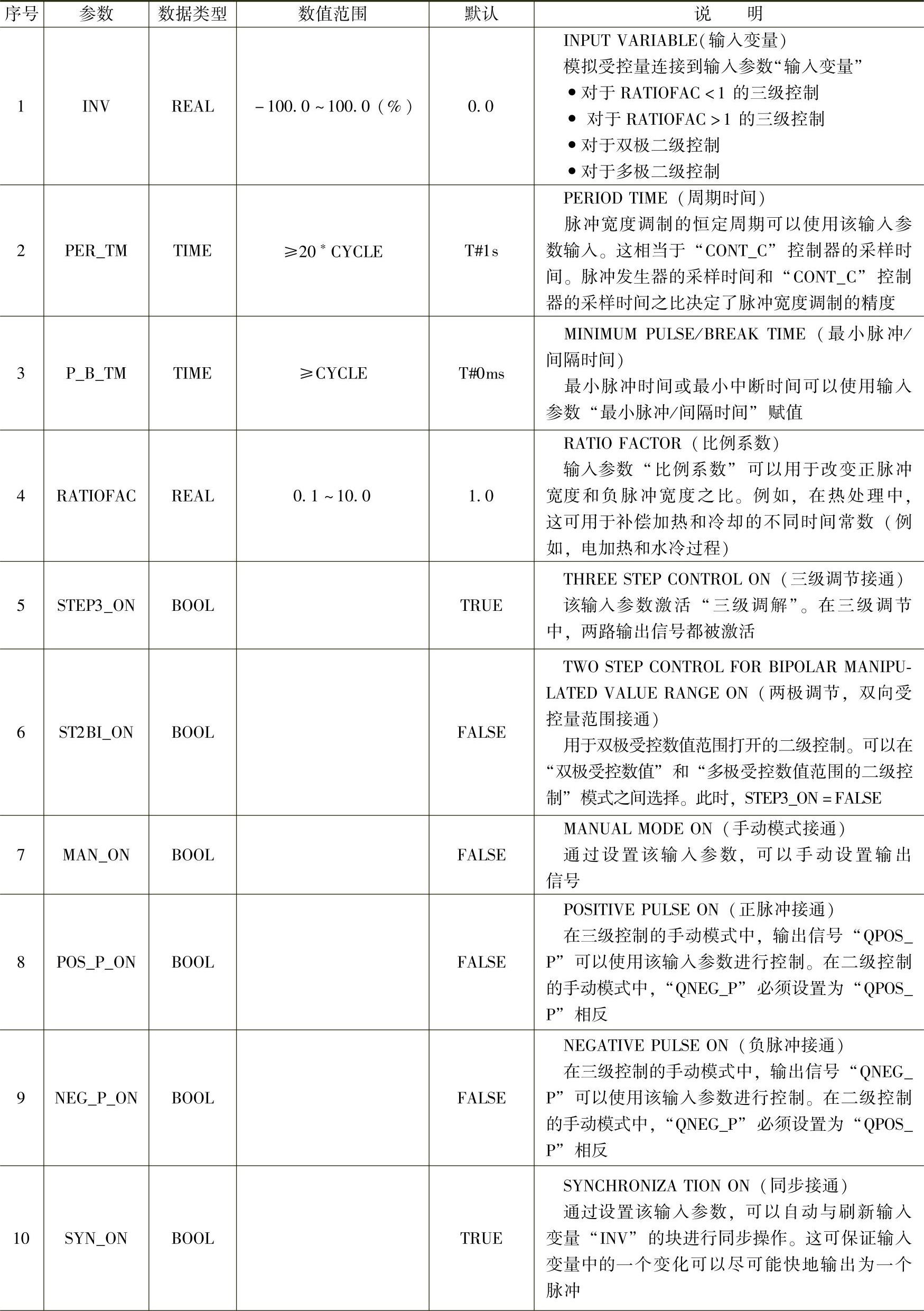
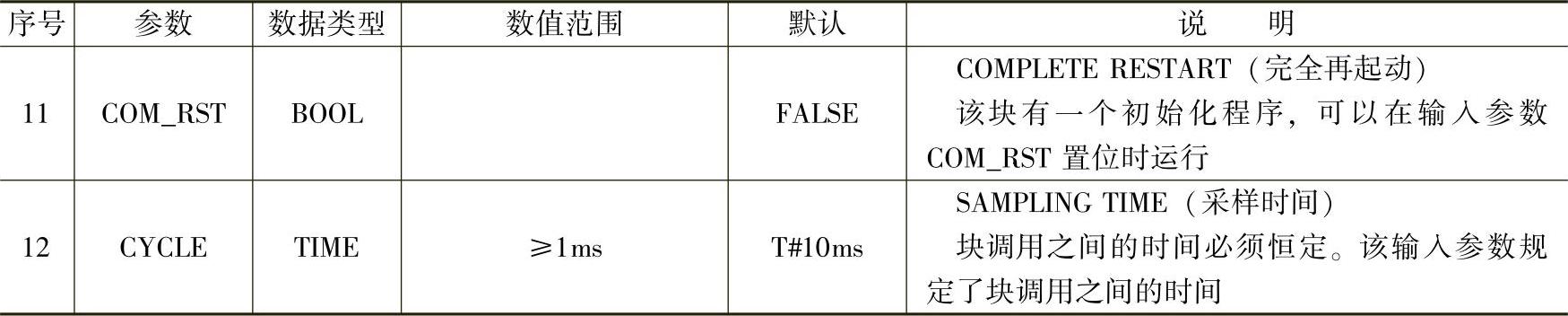
SFB 43/FB 43“PULSEGEN”输入参数的说明见表6-21。
表6-21SFB43/FB43“PULSEGEN”输入参数的说明
(续)
输入参数的数值在块中没有限制。没有参数检查。
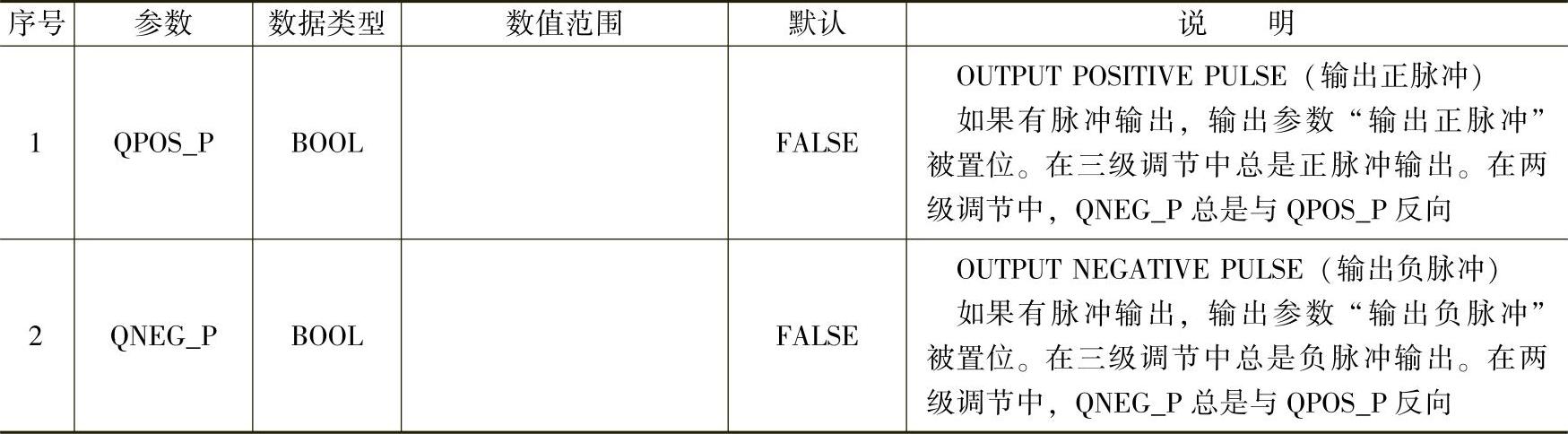
4)输出参数:SFB 43/FB 43“PULSEGEN”输出参数的说明见表6-22。
表6-22SFB43/FB43“PULSEGEN”输出参数的说明
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。