



根据T68的控制要求和逻辑控制关系,结合PLC的逻辑元件分配情况,设计出的控制梯形图如图4-3所示。
(1)主控部分
对主轴进刀与工作台互锁的行程开关SQ5和SQ6触点对应的输入继电器X11和X12取反后并联,然后串入热继电器常闭触点对应的输入继电器X21,将它们作为主控条件。当两个行程开关同时被压下时,或者主电动机过载,就会切断主控元件M10,主控条件不成立,后面的程序都不会执行,系统不工作。采用主控指令MC和MCR,简化了梯形图。
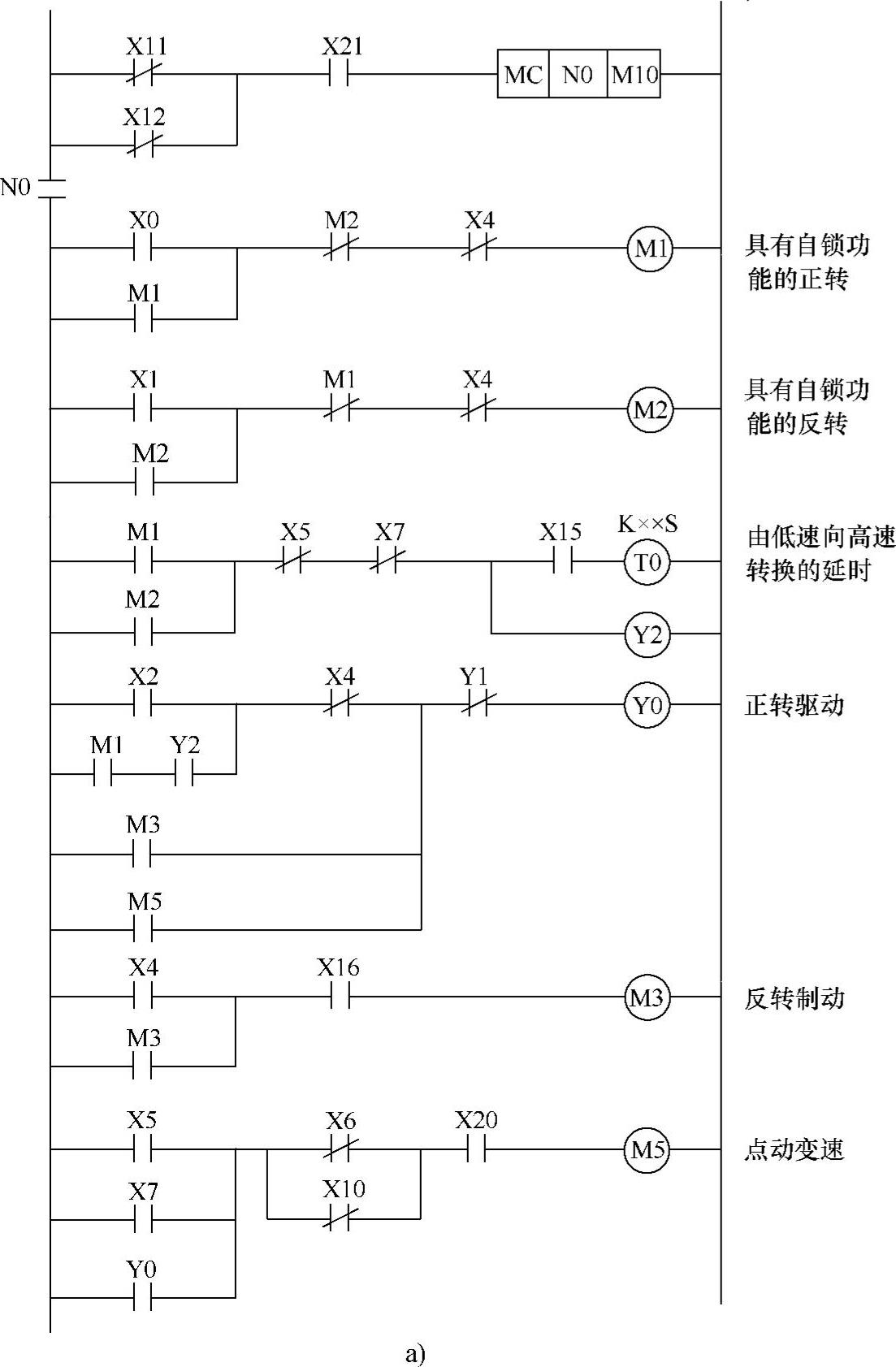
图4-3 PLC改造T68控制梯形图
(2)主电动机的起动控制
按下按钮SB1,输入继电器X0为ON,驱动辅助继电器M1线圈逻辑回路导通,M1线圈为ON并自锁,M1驱动输出继电器Y2线圈逻辑回路导通,Y2为ON,Y2使接触器KM3线圈回路闭合得电,主触点闭合,短接限流电阻R,另外M1和Y2驱动输出继电器Y0线圈逻辑回路导通并自锁,Y0驱动接触器KM1线圈回路导通得电,KM1主触点闭合;Y0驱动输出继电器Y5回路导通,Y5使接触器KM6线圈回路闭合得电。因此,电动机M1得电以后,驱动接触器KM3、KM1、KM6闭合,电动机M1绕组连接成三角形联结,以低速正转。
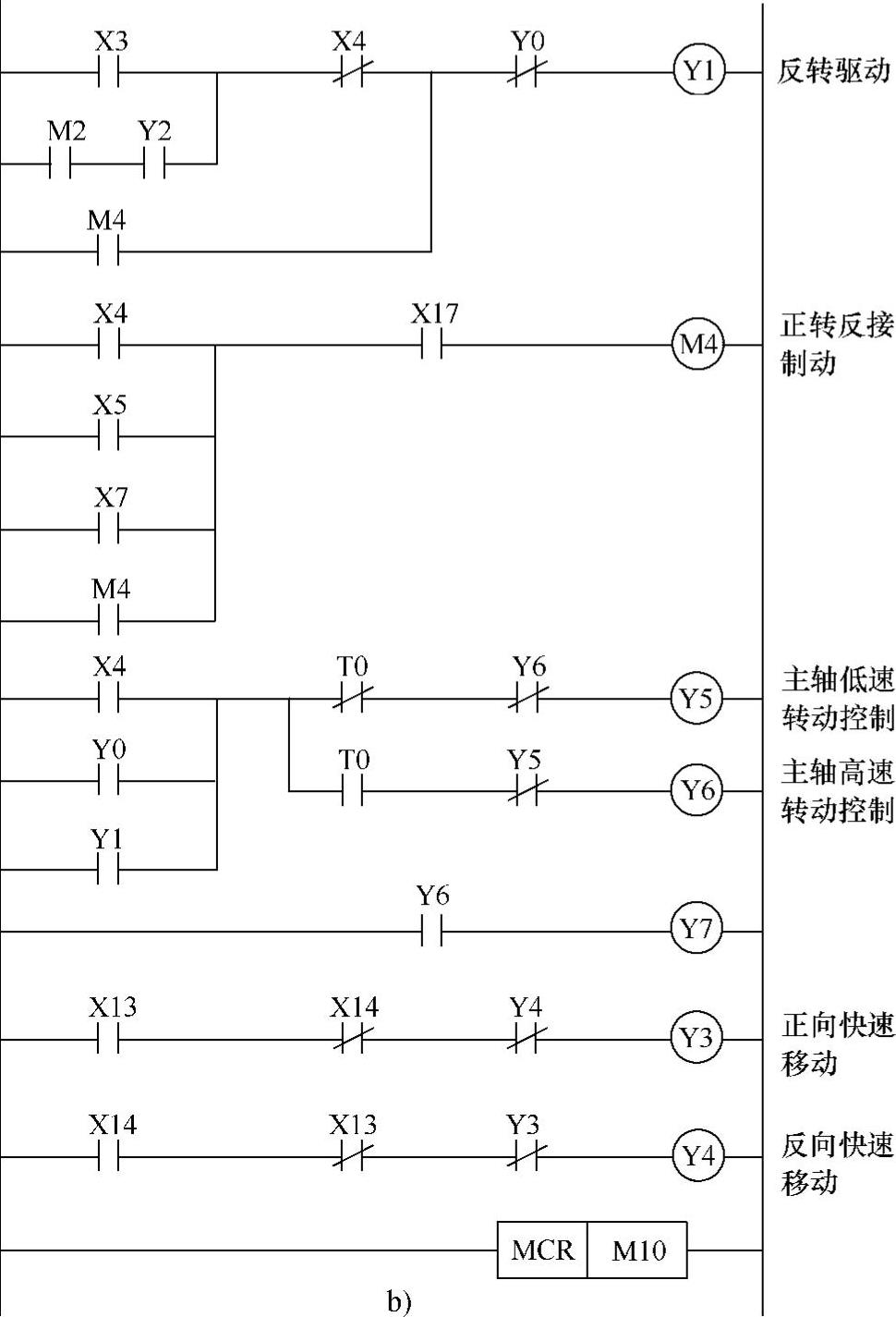
图4-3 PLC改造T68控制梯形图(续)
当按下按钮SB2时,将驱动各元件的动作过程是:输入继电器X1为ON→辅助继电器M2逻辑回路导通并自锁→输出继电器Y2线圈逻辑闭合→Y2驱动接触器KM3线圈得电→输出继电器Y1线圈回路闭合→接触器KM2线圈得电→输出继电器Y5逻辑回路闭合→驱动接触器KM6得电,所以主电路中KM3、KM2、KM6的主触点闭合,电动机M1为三角形联结,以低速正转。
正转点动:当按下按钮SB3时,输入继电器X2得电,驱动Y0回路导通,但没有自锁,Y0使接触器KM1回路闭合得电,KM1主触点闭合。Y0驱动输出继电器Y5为ON,接触器KM6得电,电动机M1主电路中的KM1和KM6得电,限流电阻R接入主电路,M1只能作点动正转控制。点动反转控制与点动正转控制类似。(https://www.xing528.com)
如果需要高速运转,则需要将行程开关SQ置于闭合位置,输入继电器X15为ON,然后先低速起动,经过延时,速度提高后再切换为高速,其正转驱动过程如下:按下按钮SB1→输入继电器X0为ON→辅助继电器M1得电并自锁→输出继电器Y2为ON→接触器KM3线圈得电→计时器T0开始计时→输出继电器Y0为ON→接触器KM1线圈得电→输出继电器Y5为ON→接触器KM6线圈得电,此时KM1、KM3、KM6得电,低速正转。当T0计时时间到→其常闭触点断开接触器KM6线圈→输出继电器Y6、Y7为ON→接触器KM7、KM8线圈闭合,主电路中KM1、KM3、KM7、KM8四个接触器主触点闭合,电动机绕组连接成双星形联结,作高速正转。在改造过程中,将通电延时时间继电器用逻辑元件T0代替。
同样,在反转时先接通PLC的元件X15、X1、M2、Y2、T0、Y1、Y5,电动机作低速反转,经过T0延时后,由T0动断触点(取反)切断Y5,接通Y6、Y7,使接触器KM2、KM7、KM8得电,主触点闭合,电动机反转。
(3)主轴制动
以正转制动为例,当按下制动按钮SB5时,输入继电器X4为ON,取反后,将切断逻辑元件M1、M2、Y0、Y2。使接触器KM1、KM3断电,正转主电路断开,同时,电动机在高速下转动,速度继电器正转触点KS-2闭合,输入继电器X17为ON,X4的动合触点驱动辅助继电器M4线圈得电,M4驱动输出继电器Y1逻辑回路导通,Y1为ON,此时接触器KM2和KM6线圈在输出继电器Y1和Y5驱动下闭合,电动机主电路为正转情况下的反接状态,产生反转制动力矩,转速迅速下降,当转速低到一定程度时,速度继电器触点KS-2断开,输入继电器X17为OFF,辅助继电器M4断开(在M4得电时,Y1线圈不能自锁),Y1线圈回路断开,驱动接触器KM2断电,主电路切断。
反转制动过程是由停止按钮对应的输入继电器X4切断M1、M2、Y1、Y2,然后又接通逻辑元件M3、Y0,接通正转主电路,产生制动力矩。控制过程类似。
(4)主运动和进给运动点动变速
主轴速度变换时,拉出变速孔盘,压下行程开关SQ1(主运动变速调整);输入继电器X5为ON,进给变速时,其变速孔盘则压下行程开关SQ3(进给运动变速调整),输入继电器X7为ON,由于电动机尚未转动,速度继电器的动断触点KS-3闭合,输入继电器X20为ON,所以辅助继电器M5逻辑回路导通,M5线圈得电为ON,其触点驱动输出继电器Y0逻辑回路导通,接触器KM1线圈得电,电动机转动,同时SQ1(或SQ3)的动断触点断开,Y2回路不能导通,则接触器KM3断电。所以电动机以较小的电流起动正转,但不能自锁,当速度提高到一定数值后,KS-3断开,KS-2接通,输入继电器X20为OFF,X17为ON,则辅助继电器M5线圈断开,Y0断电,而X17驱动辅助继电器M4得电,输出继电器Y1得电,电动机反接制动。这样,不断调整两个待啮合齿轮的相对位置,直到能够将变速盘推入,松开行程开关SQ1或SQ3为止。
(5)快速电动机移动控制
快速手柄扳到正向快速位置时,行程开关SQ7被压动,输入继电器X13得电为ON,驱动输出继电器Y3逻辑回路导通,Y3线圈为ON,接触器KM4线圈电路闭合,得电动作,接通快速移动电动机M2正转主电路。电动机正转,通过对应的机械传动机构,带动主轴箱、工作台或主轴快速移动,快速手柄扳到反向快速位置,行程开关SQ8被压动,输入继电器X14得电,切断Y3逻辑回路,KM4不能接通,达到互锁的目的,同时接通输出继电器Y4逻辑回路,驱动接触器KM5得电动作,快速移动电动机反转。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。