



C523立式车床的电气原理图如图1-11所示。图示所用的电气元件符号与功能说明见表1-7。下面分析其工作过程:
表1-7 电气元件符号及功能说明表
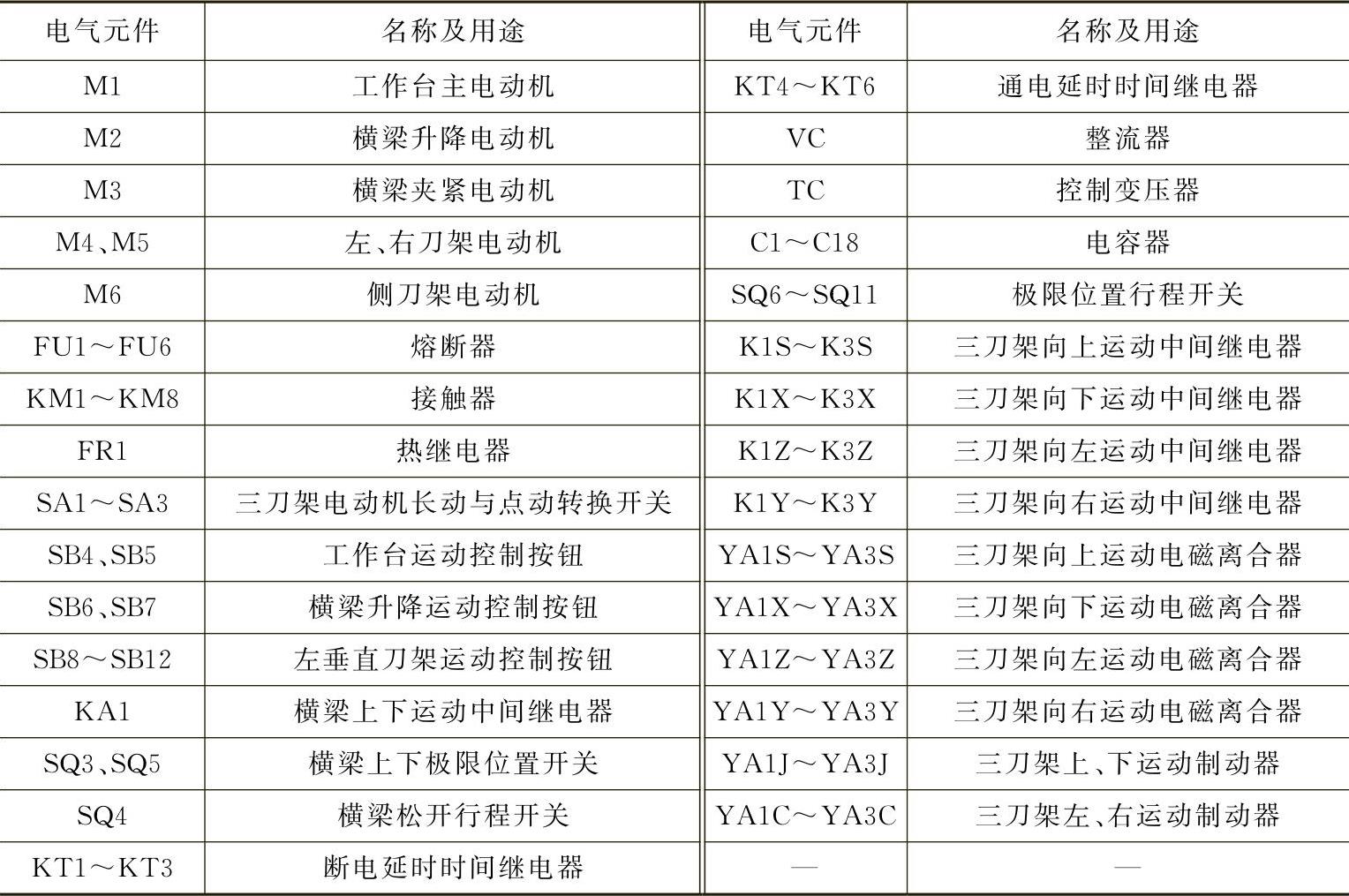
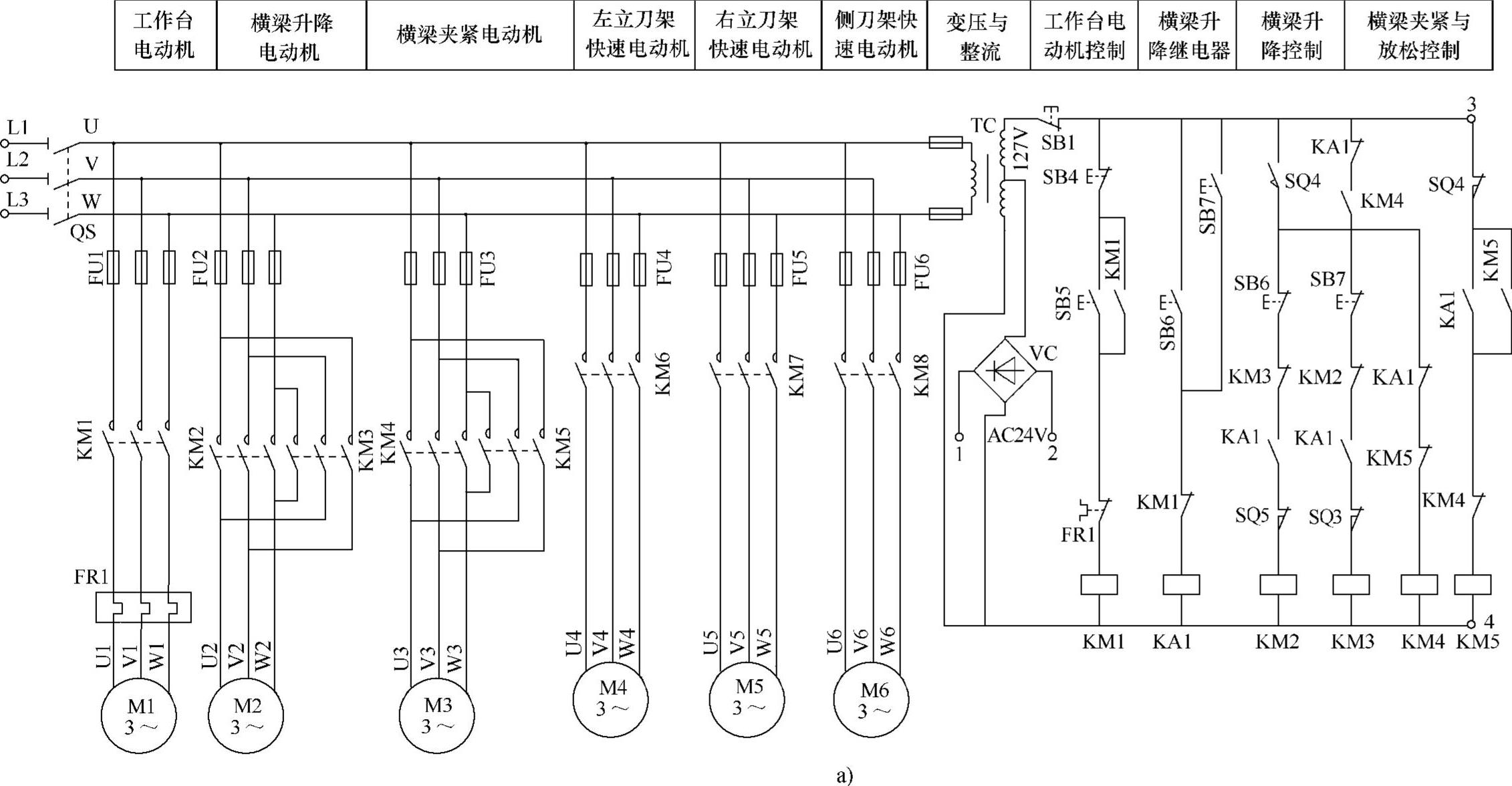
图1-11 C523立式车床的电气原理图
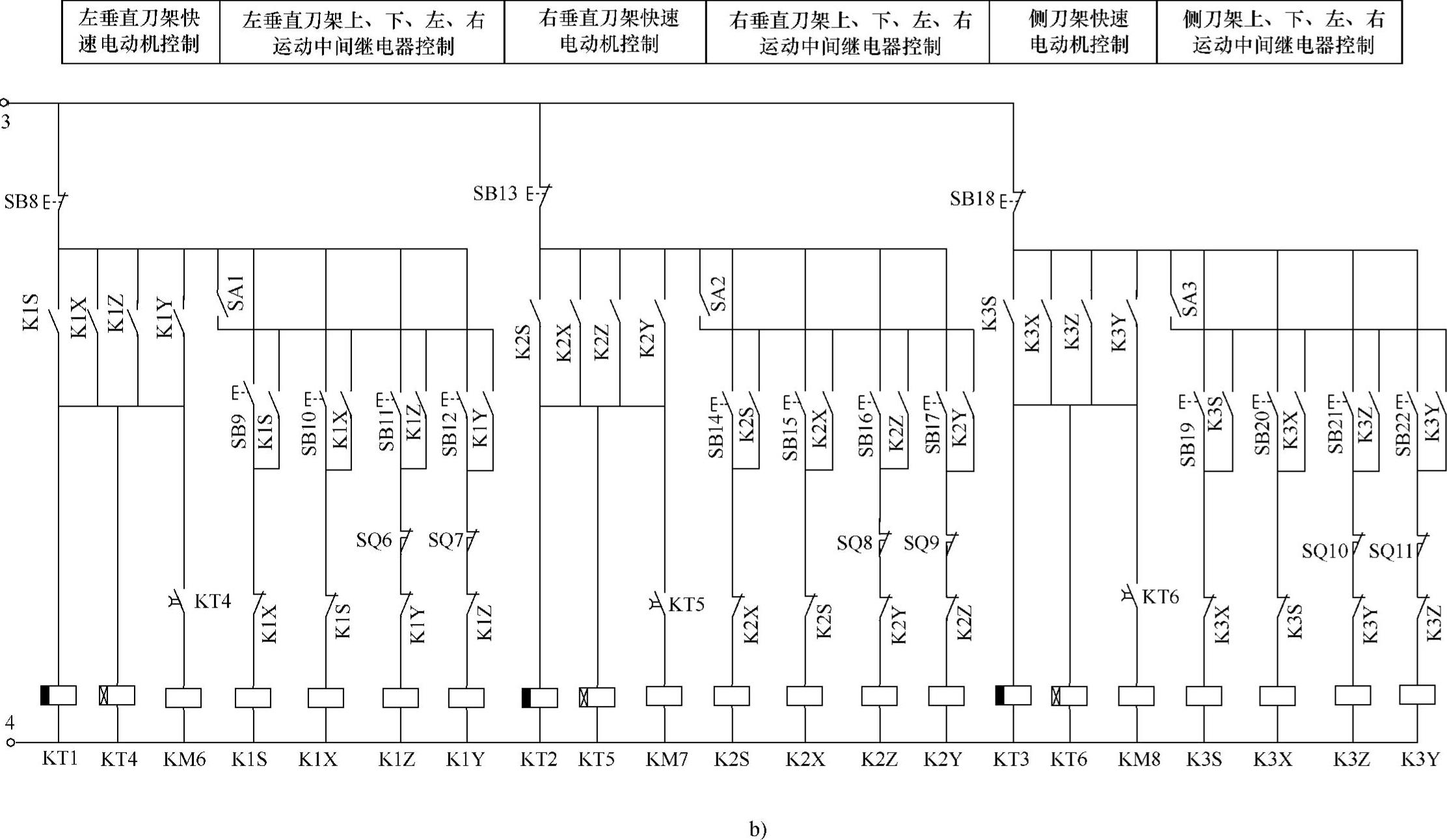
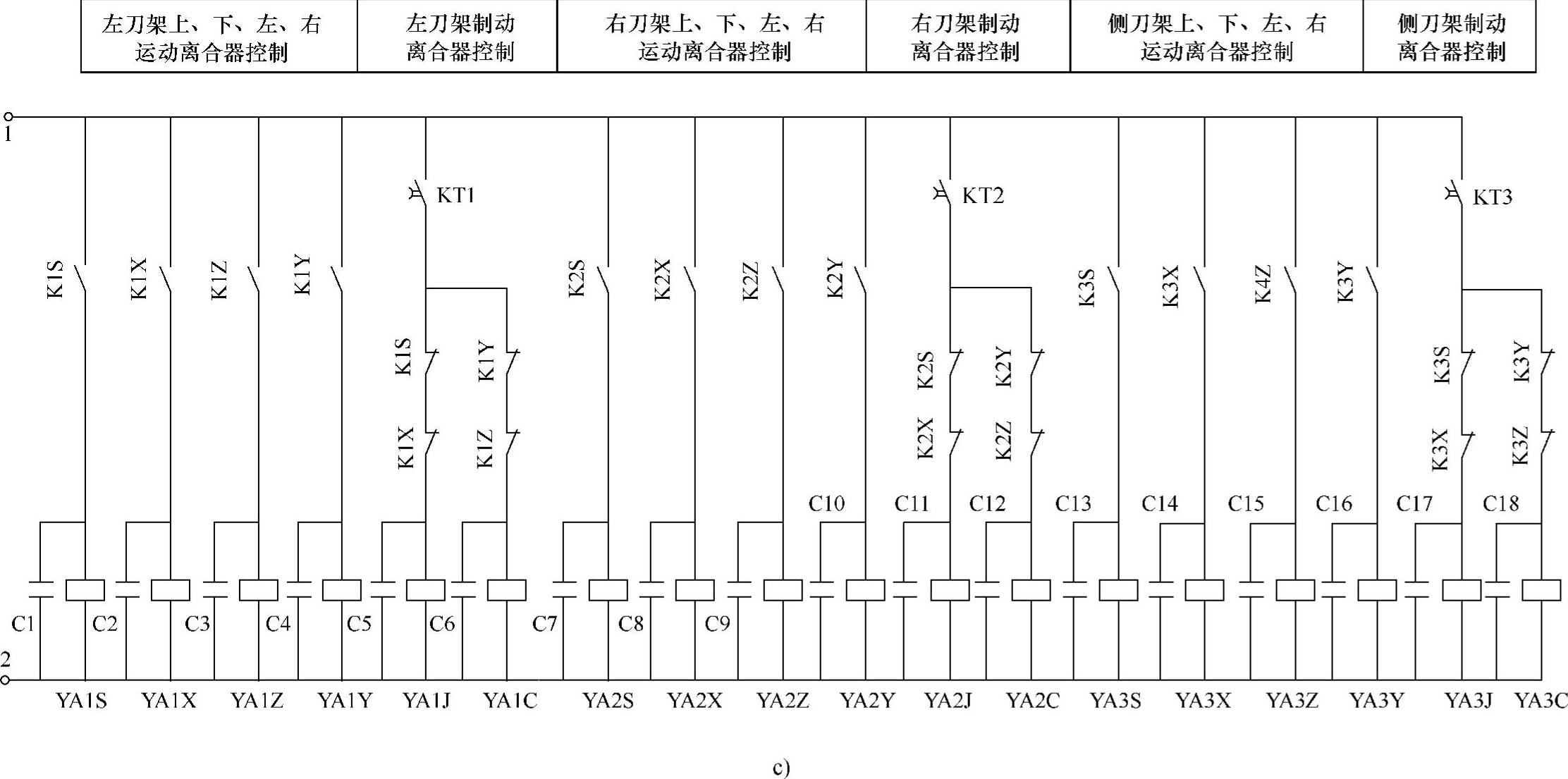
图1-11 C523立式车床的电气原理图(续)
1.主电路分析
C523双柱立式车床的主电路。是由六台三相异步电动机拖动,从图1-11中可以看出,M1为工作台拖动主电动机,M2为横梁升降电动机,M3为横梁夹紧电动机,M4、M5分别为左、右垂直刀架(立刀架)快速电动机,M6为侧刀架快速电动机。
机床电路由380V、50Hz的三相交流电源供电,而控制回路电压为127V。离合器电磁铁为24V直流。
垂直刀架和侧刀架均由电磁离合器来控制,全部操纵按钮及选择开关均安装在悬挂式按钮站上,对机床进行集中控制。
控制电路的组成部分为工作台主电动机的起动和停止、横梁升降的控制三个部分。其中横梁升降电动机和横梁夹紧电动机需要由接触器控制正、反转,其他电动机都只是单向转动。
2.控制电路分析
(1)工作台电动机控制(https://www.xing528.com)
按下按钮SB5,接触器KM1线圈得电并自锁,主触点闭合,电动机M1主电路接通起动,通过传动机构带动工作台转动。转速由齿轮机构调整决定。按下按钮SB4时,接触器KM1线圈断电,电动机M1停止转动。
(2)横梁升降电动机控制
横梁上升和下降的操作,需要先控制电动机M3转动,松开夹紧机构,当松开到一定位置后,横梁上、下运动电动机M2才转动,带动传动机构,使横梁作上、下运动;当到达指定位置后,横梁需要固定在相应位置上,则夹紧电动机M3自动反向转动,夹紧横梁,避免在加工过程中,横梁上、下位置的移动。
如果需要向上运动,则按下下降按钮SB7,中间继电器KA1线圈得电,其常开触点闭合,使接触器KM5线圈得电并自锁,电动机M3正向转动,横梁放松;当横梁放松到一定位置时,其上的制子压动行程开关SQ4,使其常闭触点断开,KM5线圈断电,横梁处于松开状态,可以进行上升或下降运动,SQ4的常开触点闭合,使接触器KM2线圈得电,主触点闭合,电动机M2正转,通过传动机构带动横梁作下降运动;由于SB7的常闭触点串接在KM3回路中,所以具有互锁作用。当下降到指定位置后,松开按钮SB7,接触器KM2线圈断电,由于SQ4被制子压住,横梁还处于松开状态,在KA1线圈断电时,其常闭触点闭合,使接触器KM4线圈电路接通,M3反转,通过传动机构使横梁夹紧,直到SQ4松开,其常开触点断开,KM4断电,M3停止,完成一次横梁下降移动调整过程。与之相反,按下按钮SB6,则M3先正转,松开横梁,M2反转实现向上移动,松开SB6则停止移动,并自动夹紧横梁。
(3)左垂直刀架运动控制
当转换开关SA1接通闭合,转换成长动状态,按下向上运动按钮SB9,则中间继电器K1S线圈得电并自锁,其常开触点闭合,使时间继电器KT1、KT4线圈得电。由于KT1是断电延时时间继电器,其延时常开触点立即闭合,为制动离合器工作打下了基础,同时电磁离合器YA1S得电动作,接通向上运动传动链。待延时时间到,则通电延时时间继电器KT4的延时动合触点闭合,接触器KM6线圈得电,使左侧刀架快进电动机M4起动,刀架作向上移动。当到达需要的位置后,按下按钮SB8,则K1S线圈断电,常开触点断开,接触器KM6、时间继电器KT4以及断电延时时间继电器KT1线圈都断电,电动机M4停止转动,刀架停止向上,电磁离合器YA1S断电。由于K1S线圈断电,其常闭触点闭合,制动离合器YA1J得电,对传动机构进行制动,使运动元件迅速停下来,KT1从线圈断电开始计时,当延时时间到,则延时触点断开,制动离合器YA1J断电,上升运动过程结束。
左垂直刀架下降时,按下起动按钮SB10,中间继电器K1X得电,KT1、KT4、KM6、YA1X线圈得电,接通向下运动传动链后,电动机M4带动刀架作向下运动,当到达指定位置后,按下停止按钮SB8,则KT1、KT4、KM6、YA1X线圈断电,电动机停止,同时制动离合器YA1J得电制动,结束向下运动控制。
左垂直刀架右运动控制与上、下运动控制相似,按下按钮SB11或SB12,对应的中间继电器K1Z或K1Y线圈得电,K1Z代表向左运动,K1Y代表向右运动,接通KT1、KT4、KM6线圈,电磁离合器YA1Z或YA1Y线圈也得电。其中,YA1Z电磁离合器得电,接通向左运动传动链;YA1Y电磁离合器得电,接通向右运动传动链;接触器KM6得电,接通电动机M4主电路。由于电磁离合器的作用,分别实现向左或向右运动,当到达指定位置后,按下停止按钮SB8,电动机停止,同时接通制动离合器YA1C进行制动。为了防止左、右运动超过极限位置,分别在左、右设置了极限限位开关SQ6、SQ7,当刀架碰到它们时,则对应中间继电器断电,电动机M4停止运动,以免移出发生事故。
当SA1断开悬空后,按下按钮SB9、SB10、SB11、SB12,则为点动调整。
(4)右垂直刀架运动控制
右垂直刀架运动控制过程与左刀架的运动控制过程相似,也包括左、右、上、下四个方向的控制,带动刀架运动的电动机为M5,由接触器KM7控制,按下上(下)运动控制按钮SB14(SB15),则对应的中间继电器为K2S(K2X)线圈得电,断电延时时间继电器为KT2线圈、通电延时时间继电器为KT5线圈、电磁离合器为YA2S(YA2X)、接触器KM7都得电,电动机M5转动,通过上、下传动链离合器带动刀架作上、下运动。按下停止按钮SB13,电动机M5停止,同时接通制动离合器YA2J进行制动。
左、右运动控制与上、下运动控制相似,按下按钮SB16或SB17,对应的中间继电器K2Z、K2Y线圈得电,K2Z代表向左运动,K2Y代表向右运动,分别接通KT2、KT5、KM7线圈和电磁离合器YA2Z、YA2Y,YA2Z接通向左运动传动链,YA2Y接通向右运动传动链。分别在左、右设置了极限限位开关SQ8、SQ9,当刀架碰到它们时,则中间继电器K2Z或K2Y断电,电动机M5停止运动,以免移出发生事故。停止时,由制动离合器YA2C完成制动。
(5)侧刀架运动控制
侧刀架电动机运动由M6带动,接触器KM8控制其接通,控制过程与左、右刀架控制一样,不再叙述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。