



假设超声振动的幅度为Ao,该值应该很小,以保证在时间增量Δt内,节点没有明显的滑移。例如,滑移模型处理微米或者纳米尺度的滑移时,其方向可以随超声振动迅速发生变化。当 ,滑移方向可发生变化,其中,μ是滑移系数;τxy是切应力;σy是图4.16中y方向的应力。通过自洽的方法求解每一步的滑移率较难,假设微滑移率为
,滑移方向可发生变化,其中,μ是滑移系数;τxy是切应力;σy是图4.16中y方向的应力。通过自洽的方法求解每一步的滑移率较难,假设微滑移率为 ,其中,αs是常数,则通过微摩擦滑移可以求得下一时间步的应力分布,但由于每一步都有应力释放,摩擦滑移模型不能用于大的滑移行为。
,其中,αs是常数,则通过微摩擦滑移可以求得下一时间步的应力分布,但由于每一步都有应力释放,摩擦滑移模型不能用于大的滑移行为。
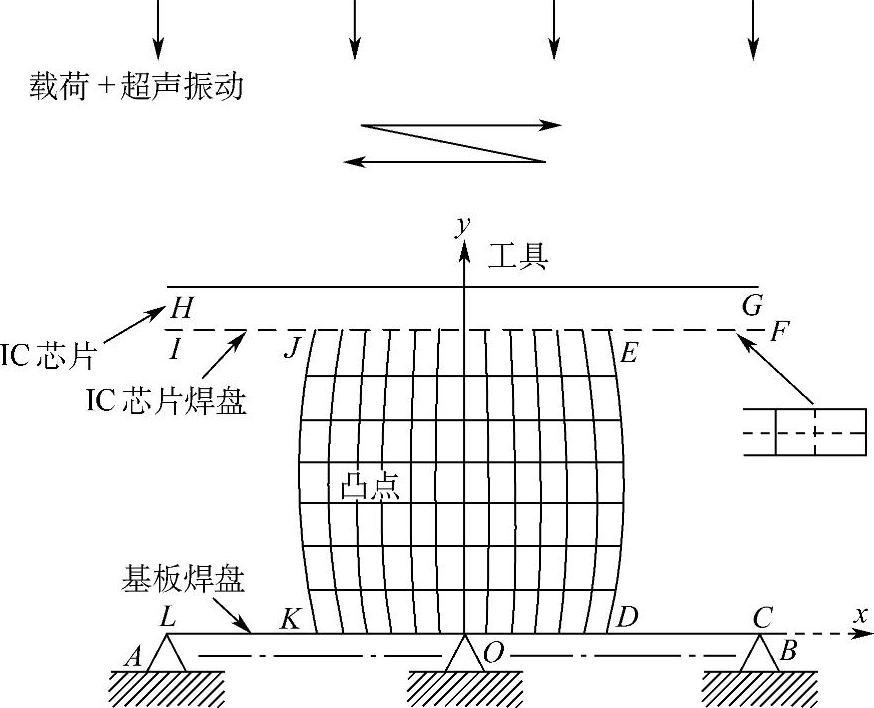
图4.16 键合凸点有限元网格划分示意图
摩擦滑移系数可以表示为以下三项的函数:μo、滑移量及加工硬化的和:
 (https://www.xing528.com)
(https://www.xing528.com)
式中,μo取决于局部法向应力Pl和温度T,可以近似写为μo=ks(asPl+bs)(AsT+Bs),且ks可以表示为 +ko3、ko1、ko2,其中,ko3、as、bs、As和Bs是常数,如表4.2所示。例如,Pl=392MPa,T=473K,t=0s时,μ=3.47×10-1。滑移方向就是切应力的方向。当超声振动平行于IC芯片和凸点时,键合界面边缘处应力σy是正的(拉应力),与超声振动的方向相反。此时节点应该分离,但是超声振动下节点的分离过程是很难通过编程实现的,因此,假设当σy>0时,键合界面处节点不是分开的,具有相同的滑移率
+ko3、ko1、ko2,其中,ko3、as、bs、As和Bs是常数,如表4.2所示。例如,Pl=392MPa,T=473K,t=0s时,μ=3.47×10-1。滑移方向就是切应力的方向。当超声振动平行于IC芯片和凸点时,键合界面边缘处应力σy是正的(拉应力),与超声振动的方向相反。此时节点应该分离,但是超声振动下节点的分离过程是很难通过编程实现的,因此,假设当σy>0时,键合界面处节点不是分开的,具有相同的滑移率 (局部键合界面最内侧节点的滑移率,其σy=0)。这是模拟超声凸点键合过程仍然存在的一个问题。图4.16b中平行于IC芯片和表面HG的超声振动为uv=Aosinwt,速率为
(局部键合界面最内侧节点的滑移率,其σy=0)。这是模拟超声凸点键合过程仍然存在的一个问题。图4.16b中平行于IC芯片和表面HG的超声振动为uv=Aosinwt,速率为 ,其中,Ao是振幅;w=2πfv;fv是超声振动的频率。时间增量Δt设置为Δt=Tv/8,其中,Tv是周期(Tvfv=1)。
,其中,Ao是振幅;w=2πfv;fv是超声振动的频率。时间增量Δt设置为Δt=Tv/8,其中,Tv是周期(Tvfv=1)。
表4.2 微滑移模型中的常数

注:这些常数适用于Au/Au键合界面。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。