



1.IPM在大功率逆变电源中应用实例
(1)IPM(DC/AC)内部结构
IPM(DC/AC)具有体积小,重量轻;转换效高;适应负载能力强;各种保护功能全;具有程控接口,可实现对模块的控制和保护等特点。用IPM模块构成的低频逆变电源(DC/AC,40Hz/50Hz/60Hz/400Hz/600Hz),具有设计快捷、简单和高效等特点。IPM模块内部方框原理图如图6-37所示。
1)辅助电源。由启动电源和内反馈电源组成,它要求电压在20~500V范围内能正常工作(一般情况下在交流200V整流后350V直流电压下工作。)
2)电流型PWM及辅助保护电路。所谓电流型即在比较器的输入端直接用检测到的输出电流信号与误差放大器输出信号进行比较,来控制输出的峰值电流跟随误差电压变化。这种控制方式可以改善整个逆变电源电压和电流的调整率,改善整个系统的瞬态响应。电流型PWM还具有重迭脉冲抑制电路,消除在一种输出里出现两个连续脉冲的可能性。而一般电压型PWM在受干扰时,常出现一路输出中有两个连续重迭脉冲,造成桥电路上下直通而损坏IGBT。电流型PWM可根据检测电路送来的电流信号实行逐个检测,信号大时逐个关断,超过极限时全保护关断(此时需关机启动,或延时3s软启动。)。
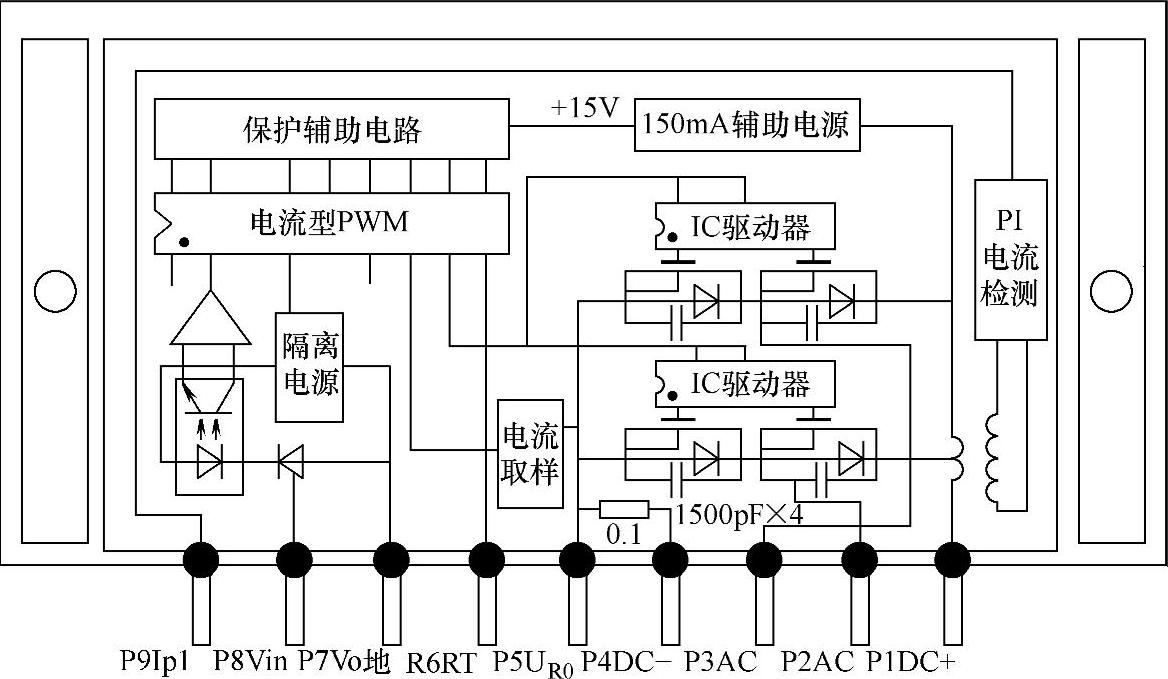
图6-37 IPM模块内部方框原理图
3)IC驱动电路。在半桥或全桥电路中高端和低端的驱动器是不共地的,一般采用脉冲变压器隔离。当频率在几赫兹范围内变化时,普通的脉冲变压器是无法胜任的。IC驱动器就不存在上述问题,它的固有死区能防止产生误直通信号,它的图腾柱电路能吸收桥式电路中功率器件寄生电容产生的“米勒效应”。
4)全桥DC/AC变换器采用性能优良的IGBT,在公共接地点上伴有电流取样电阻,它能检测到内部任一桥路或任一桥路的外部过流、短路,将检测信号送往保护辅助电路进行判断调整或实施极限保护。桥电路并有4×1500pF电容,P3输出端串接电感(1mH)可构成为零电压开通、关断的谐振电路(ZVS)。
5)电流检测。将流过第1脚的电流取样送至第9脚,经过调整送至第8脚可进行恒流控制,此功能在50Hz模块内自动限定。
(2)引脚功能及模块的应用电路
DC-ACIPM的引脚功能见表6-12,DC-ACIPM模块构成的50Hz/1000W逆变电源如图6-38所示。
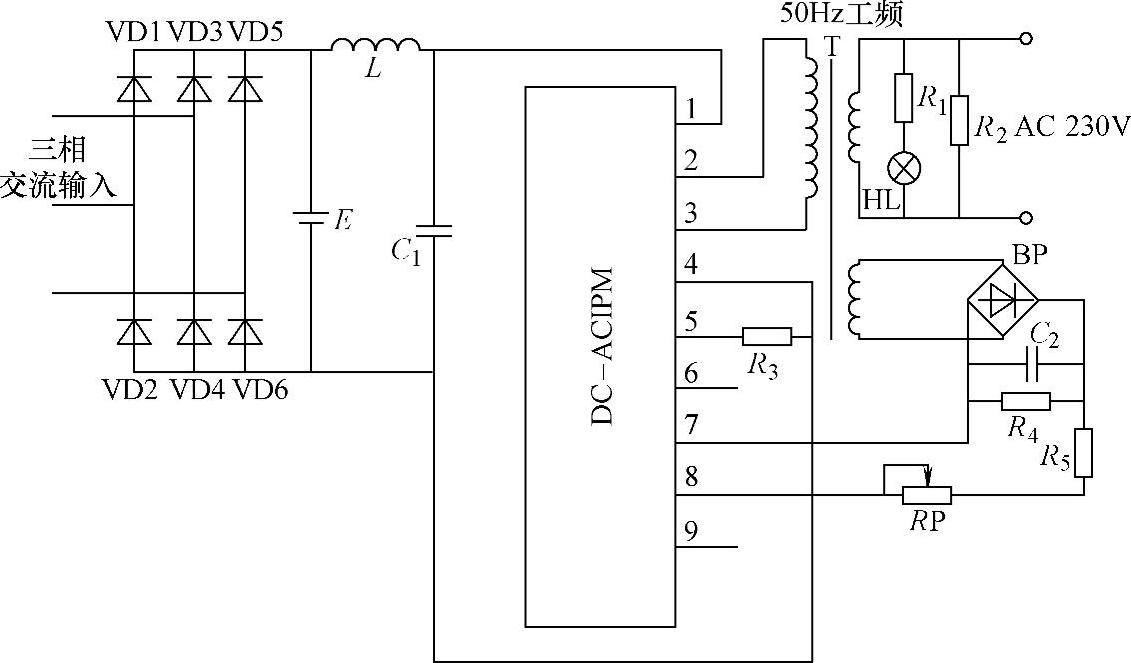
图6-38 DC-ACIPM模块构成的50Hz/1000W逆变电源图
表6-12 DC-ACIPM的引脚功能

2.IPM在中频高压电源中应用实例
(1)系统结构
采用IPM的中频高压电源的系统结构图如图6-39所示。其主回路为交流-直流-交流的电压型变频电路,由调压模块、低频整流滤波模块、IPM逆变模块、中频滤波模块、中频变压器隔离升压模块以及中频高压整流模块等组成。
控制系统采用8031单片微机和PWM专用控制芯片SG3524,单片机系统对系统电路中出现的过压、过流及短路等故障进行检测和控制,若系统出现故障,单片机立即发出故障信号封锁PWM芯片SG3524的输出,并显示故障信息。PWM芯片SG3524输出一对互补的脉宽调制信号,经过光电耦合器隔离后形成两对互补的脉宽调制信号去触发IPM。
(2)控制电路
控制电路如图6-40所示,在接通电源开关S1前,应将调压电位器回零,当电源开关S1接通后,内部控制电路使输出开关S2自动接通,此时,调节调压电位器再离开零位时,输入电压经调压模块后正常输出。若电源开关S1接通时,调压电位器没有回零,控制系统将使输出开关S2处于断开状态。使调压模块没有电压输出,可防止调压电位器没有回零而电源突然开通时产生的过大电流对电路的冲击。
SilionGeneral公司生产的PWM芯片SG3524内部具有5V/50mA的基准电压及短路保护电压稳压器,为内部电路提供电源及外部基准。它还提供了一个稳定的振荡器,其频率由外接电阻R和外接电容C设置,f=1.1/RC。SG3524的输出级为NPN晶体管,能提供100mA的最大电流及相位差为180°的信号,不允许集电极和发射极开路。其输出脚12,13分开使用时,输出脉冲的占空比为0~45%,脉冲频率等于振荡器频率的1/2,并且这两路脉冲相位差180°。当关断端10脚加高电平时,可实现对输出脉冲的封锁。

图6-39 系统结构框图
图6-40 软启动调压示意图
中频高压电源的脉宽调制电路如图6-41所示。RP2为芯片内部振荡器频率的调节电阻。将SG3524芯片内部误差放大器接成射极跟随器的形式,即将1脚和9脚相连,则补偿端9(即误差放大器和限流放大器的输出端)的电压与输入端2的电压相同。从基准电压端16脚通过调节RP1获一理想的电平信号(这需要和IPM输出的滤波环节协调操作,以获得理想的正弦波输出),将此信号加到SG3524的2脚上,与SG3524内部产生的锯齿波调制信号比较后,得到一对反相的脉宽调制信号,再经光耦合器隔离输出四路脉宽调制信号。
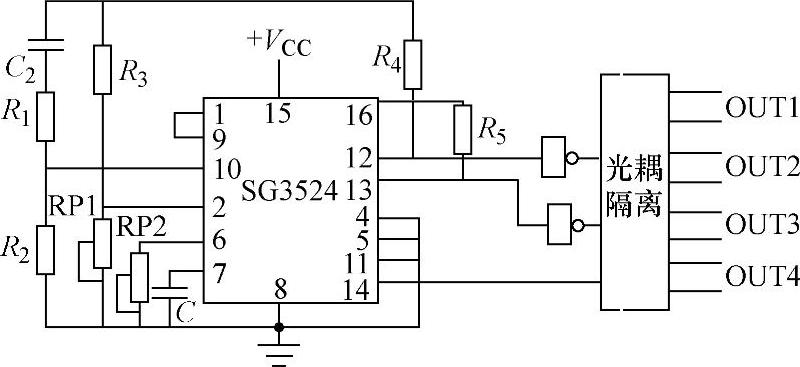
图6-41 脉宽调制电路
SG3524的控制输入端是一个可调的电平信号,通过与逆变器输出滤波环节的协调,能得到较理想的正弦波。若采用正弦波与SG3524内部的锯齿波调制产生脉冲,因比较器存在抖动问题,输出脉冲的波形将不稳定。要得到稳定的波形,须附设去抖电路。输出电压波形主要取决于频率的变化,如电阻R3=10kΩ,RP1=20kΩ时,输出电压波形比较理想。
IPM选用三菱公司生产的PM10CSJ060,其最高工作电压为600V,最大电流为10A,工作频率为5~20kHz,由两个单元构成。其内部集成了高速、低功耗的IGBT芯片和优化的栅极驱动与保护电路,可以连续、自动地监测功率器件的电流,实现高速的过电流保护和短路保护。其内部还集成了欠电压和过热保护电路。此模块的输入端与输出端之间没有完全隔离,其控制端各相电源应相互独立(即VVpl、Vvpl、Vwpl、Vnl应接独立的电源)。
PWM脉宽调制信号与PM10CSJ060的连接如图6-42所示。PM10CSJ060内部有6个IGBT单元,若制作单相电源,只需4个单元即可。选用了U、V两相的控制输入与输出端。在图6-42中2脚(VFO)、6脚(VFO)和18脚(FO)为故障输出信号(即过电流、短路、欠电压和过热等),将这些信号送入8031单片机中。当故障发生时,8031单片机将显示故障类型并立即封锁PWM芯片SG3524的输出,起到快速保护的作用。
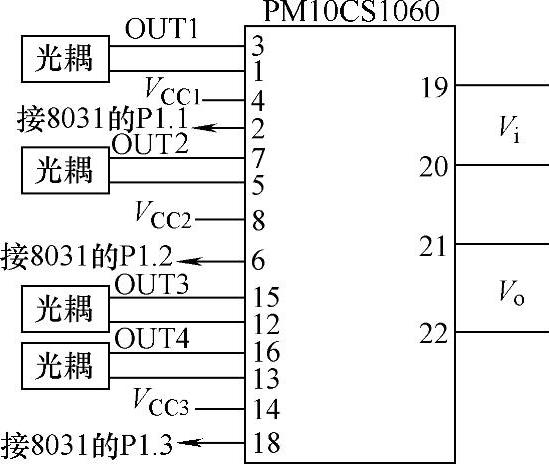
图6-42 脉宽调制信号与PM10CSJ060的连接图
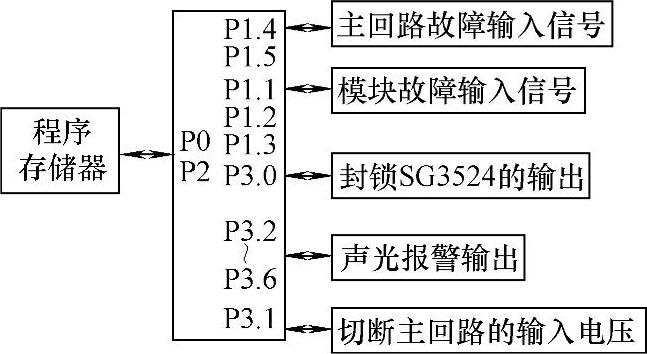
图6-43 单片机组成的故障报警电路
(3)故障报警电路
故障报警电路如图6-43所示,因8031内部无程序存储器,其P0和P2口只能作地址总线用,外接程序存储器,不能作为普通的I/O口使用。输入的故障信号有两类:一类是主回路过电压过电流信号,另一类是IPM的故障信号(短路、过电流、欠电压、过热等)。当单片机检测到有故障信号时,将立即封锁SG3524的触发输出(在SG3524的第10脚加一个高电平即可),同时输出声光报警信号。

图6-44 系统要求的输出波形
IPM输出电压经过L和C滤波后送到中频变压器TP升压,再经全波整流后送往负载。为了使输出波形达到如图6-44所示(电压幅值为0~10kV、频率为8~10kHz)的波形。在输出端并联一个电阻R0,其阻值应选择合适。若R0很大,将导致放电时间常数R0×C0(C0为输出端分布电容)很大,使得输出电压不能降到零。若R0太小,会导致R0上消耗的功率过大。当负载电阻较小时,R0可以省略。
3.IPM在变频电源中的应用实例
(1)IPM的优点
日本三菱公司的IPM有四种电路形式,单管封装(H)、双管封装(D)、六合一封装(C)、七合一封装(R),如图6-45所示。其中C型和R型是专为变频电源使用设计的。小功率的IPM使用多层环氧绝缘系统,中大功率的IPM使用陶瓷绝缘。
IPM有精良的内置保护电路以避免因系统失灵或过应力而使功率器件损坏,所设置的故障检测和速断装置允许在不牺牲可靠性的条件下,最大限度地利用功率元件的容量。内置保护功能的框图如图6-46所示:

图6-45 三菱IPM的封装
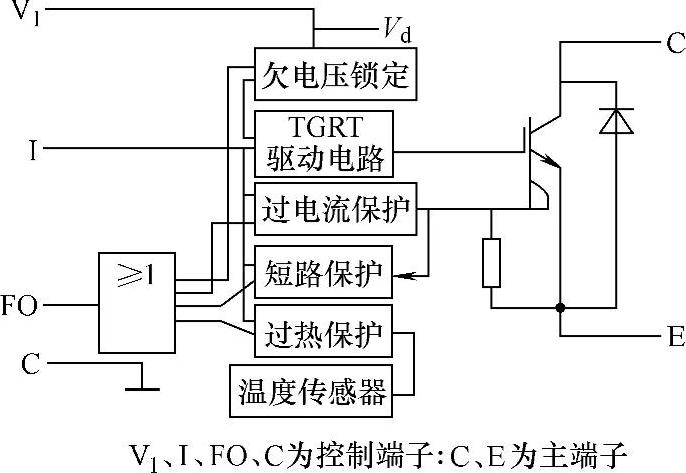
图6-46 IPM的保护功能框图
如果IPM模块其中一种保护电路动作,IGBT的驱动单元就会关断IGBT,并输出一个故障信号(FO)。IPM的主要优点有:
1)由于IPM集成了驱动和保护电路,使产品的设计变得相当容易,缩短了产品上市的时间。
2)IPM结构和测试手段提高了系统的可靠性。
3)由于IPM通态损耗和开关损耗都比较低,使得散热器减少,因而产品尺寸也减少。
4)所有的IPM都采用同样的标准化与逻辑电平控制电路相连的栅控接口,在产品系列扩充时无须另行设计驱动电路。
5)IPM在故障情况下具有自保护能力,减低了器件在开发和使用中过载情况下的损坏机会。
(2)IPM的内置保护功能
D型IPM结构及IGBT等效电路如图6-47所示,IPM的功能框图如图6-48所示。IPM内置了驱动和保护电路,而隔离接口电路需在应用中设计。IPM与普通的IGBT模块相比,IPM在系统性能及可靠性方面都有进一步的提高。IPM各种保护功能如下:
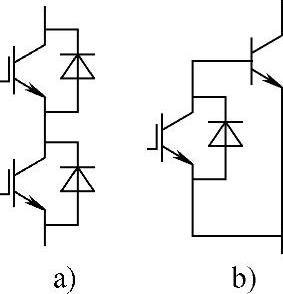
图6-47 D型IPM结构及IGBT等效电路
a)D型IPM结构 b)IGBT等效电路
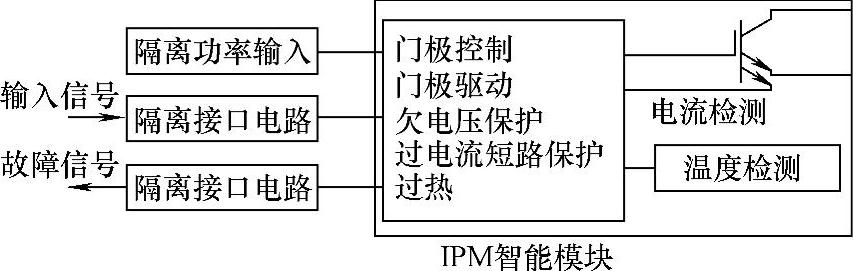
图6-48 IPM功能框图
1)控制电压欠电压(UV)保护。IPM使用单一的+15V供电,若供电电压低于+12.5V,且欠压时间超过toff=10ms,欠压保护动作,封锁栅极驱动电路,并输出故障信号。
2)过温(OT)保护。在靠近IGBT芯片的绝缘基板上安装了一个温度传感器,当IPM温度传感器检测出其基板的温度超过温度允许值时,过温保护动作,封锁栅极驱动电路,并输出故障信号。
3)过电流(OC)保护。若流过IGBT的电流值超过过流动作电流,且过电流时间超过设定的时间toff,则过电流保护动作,封锁栅极驱动电路,并输出故障信号。为避免在关断IGBT时发生过大的di/dt,大多数IPM采用两级关断模式,过流保护和短路保护工作波形如图6-49。其中,VGE为IGBT的栅极驱动电压,ISC为短路电流值,IOC为过流电流值,IC为集电极电流,IFO为故障输出电流。
4)短路(SC)保护。若负载发生短路或控制系统故障导致短路,流过IGBT的电流值超过短路动作电流,则短路保护立即动作,封锁栅极驱动电路,并输出故障信号。跟过流保护一样,为避免在关断IGBT时发生过大的di/dt,大多数IPM采用两级关断模式。为缩短过流保护的电流检测和故障动作间的响应时间,IPM内部使用实时电流控制电路(RTC),使响应时间小于100ns,从而有效抑制了电流和功率峰值,提高了保护效果。
当IPM发生UV、OC、OT、SC中任一故障时,其故障输出信号持续时间tfo为1.8ms(SC持续时间会长一些),此时间内IPM会封锁栅极驱动,关断IPM内的功率器件;故障输出信号持续时间结束后,IPM内部自动复位,栅极驱动通道开放。
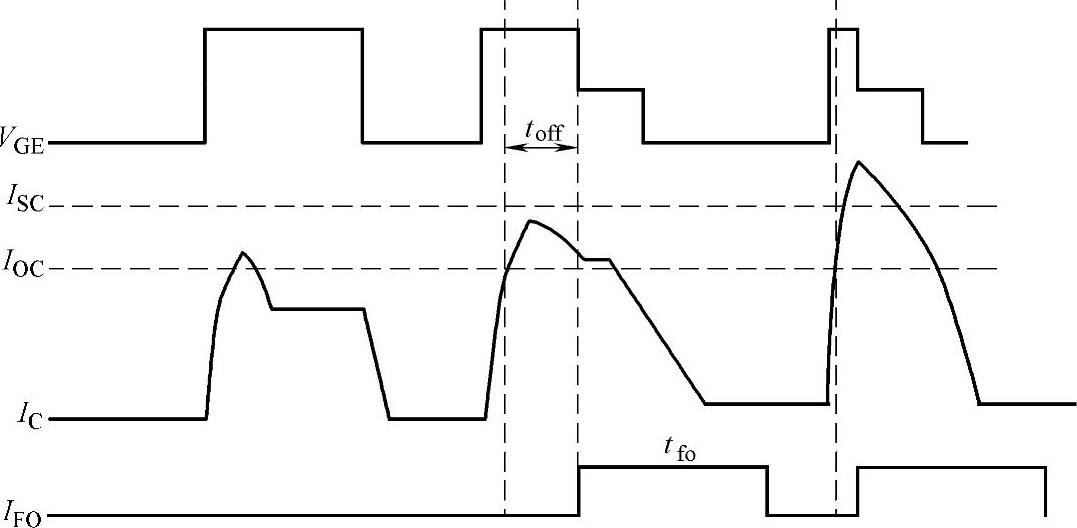
图6-49 IPM短路及过电流保护操作波形
IPM自身产生的故障信号是非保持性的,如果tfo结束后故障源仍旧没有排除,IPM就会重复自动保护过程,反复动作。过电流、短路、过热保护动作都是非常恶劣的运行状况,应避免其反复动作,因此仅靠IPM内部保护电路还不能完全实现器件的自我保护。要使系统真正安全、可靠运行,需要辅助的外围保护电路。
4.IPM的选用
在选用IPM时,首先是根据变频电源的容量(负载的额定功率),同时也要考虑供电电源容量,确定其额定值和最大值,然后选择IPM的具体型号。选型时,应根据IPM的过流动作数值,确定峰值电流及适当的热设计,以保证IPM内的IGBT结温峰值永远小于最大结温额定值,使基板的温度永远低于过热动作数值。
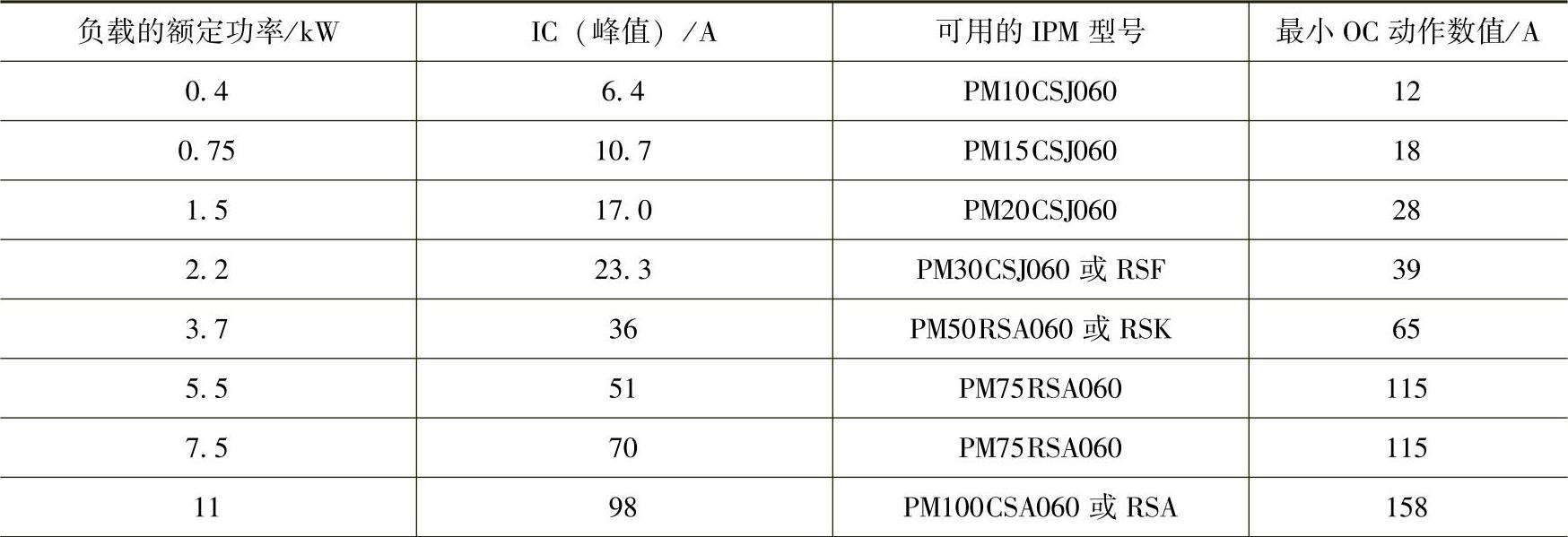
峰值电流依负载的功率额定值而定,表6-13是根据OC动作数值和负载峰值电流而给出的交流220V感性负载时推荐使用的IPM类型。负载峰值电流是基于变频电源和负载工作的效率、功率因数、最大负载和电流脉动而设定的。负载电流最大峰值可由下式计算:

式中,P为负载功率(W);QL为变频电源最大过载系数;λ为电流脉动因数;η为变频电源的效率;φF为功率因数;VAC为交流线电压(V)。
表6-13 交流220V电机额定值对OC保护设置的要求数据
 (https://www.xing528.com)
(https://www.xing528.com)
(续)

例如,电源VAC=220V交流,负载P=3.7kW,QL=150%,λ=120%,η=0.9,φF=0.76,则ICF(峰值)=36.1A。
依据表6-13推荐的型号PM50RSA060所规定的最小OC动作数值是65A,所以这个型号能够满足第一个要求,选定后,还需通过适当的热设计来满足其热要求。在具体的应用中,应针对器件手册中给定的参数如:最大额定值,特性参数(电气特性,热特性,机械特性)以及推荐的工作条件进行系统设计。
IPM驱动和保护电路
驱动电路是IPM主电路和控制电路之间的接口,良好的驱动电路设计对装置的运行效率、可靠性和安全性都有重要意义。PM100DSA120是一种D型IPM,内部封装了两个IGBT,工作在1200V/100A以下,功率器件的开关频率最大为20kHz。由于IPM内置了驱动电路,与IGBT驱动电路设计相比,外围驱动电路的设计比较简单,只要能提供15V直流电压即可。但是IPM对驱动电路输出电压的要求很严格,具体为
1)驱动电压的范围为15V±10%,电压低于13.5V将发生欠电压保护,电压高于16.5V将可能损坏内部部件。
2)驱动电压应相互隔离,以避免地线噪声干扰。
3)驱动电源的绝缘电压至少是IPM极间反向耐压值的两倍(2Vces)。
4)驱动电流可以参阅功率器件给出的20kHz驱动电流要求,根据实际的开关频率加以修正。
5)驱动电路输出端滤波电容不能太大,这是因为当寄生电容超过100pF时,噪声干扰将可能误触发内部驱动电路。
完善的系统保护不能只依靠IPM的内部保护机制,需要设计辅助外围保护电路,这可以通过硬件的方式实现,也可以通过软件的方式实现。IPM保护电路的硬件电路如图6-50所示。
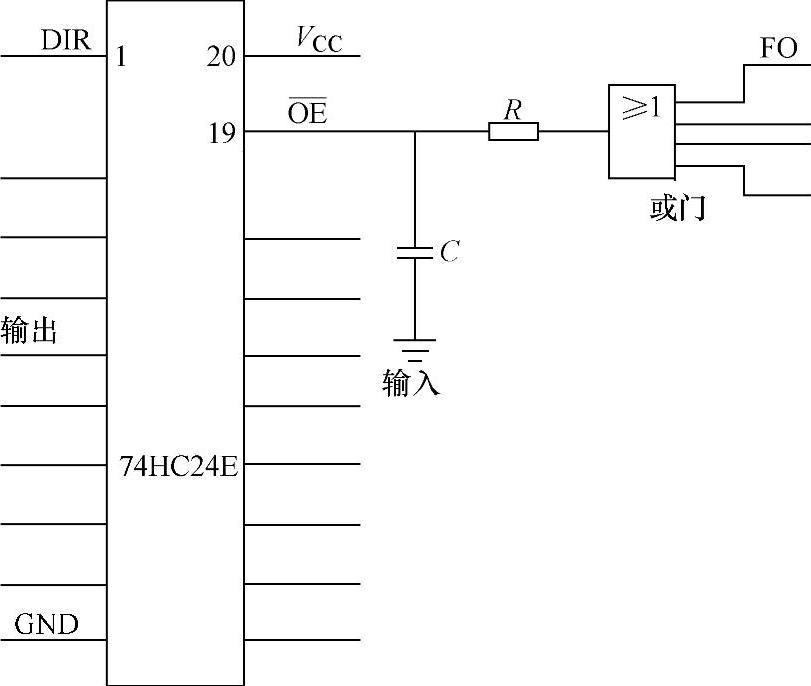
图6-50 IPM外围保护电路
在图6-50所示电路中,在PWM接口电路前设置有74HC24E等带控制端的三态收发器,IPM的控制信号经过74HC24E的输入、74HC24E的输出后送至IPM接口电路;各个IPM的故障输出信号经光耦合器隔离输出后得到高电平FO,送入或门,或门输出经过R、C低通滤波器后,送入74HC24E的使能端OE。IPM正常工作时,或门输出为低电平,74HC24E选通。IPM故障报警时,或门输出为高电平,将74HC245所有输出置为高阻,封锁各个IPM的控制信号,使IPM关断,实现了保护功能。
在图6-50所示电路PWM接口电路前若设置一级带控制端的光耦合器,如6N137,其保护原理与采用74HC24E类似,只是由于高电平使能控制光耦合器6N137,或门换成了或非门,其输出经过RC低通滤波器后,送入了可控光耦合器6N137的使能端UE,但同样在IPM故障报警时封锁IPM的控制信号通道,实现了保护功能。需要注意的是,为缩短故障响应时间,R、C低通滤波器时间常数应该小。两级光电耦合器延长了故障响应时间,应选用高速光耦合器。
以上两种方案都是利用IPM故障输出信号封锁IPM的控制信号通道,因而弥补了IPM自身保护的不足,有效地保护了器件。IPM保护电路的软件实现方法的基本思路是:IPM故障报警时,故障输出信号送到控制单元处理,控制单元确认故障信号后,利用软件关断IPM的控制信号,从而达到保护目的。软件保护不需增加硬件,简便易行,但可能受到软件设计和计算机故障的影响;硬件保护则反应迅速,工作可靠。在实际应用中软件与硬件结合的保护方式能更有效地提高系统的可靠性。
5.富士IPM在逆变电路中应用实例
富士IPM模块有很多不同的系列,每一系列的主电源电压范围各有不同,在设计时一定要考虑其应用的电压范围。600V系列主电源电压和制动动作电压都应该在400V以下,1200V系列则要在800V以下。开关时的最大浪涌电压为:600V系列应在500V以下,1200V系列应该在1000V以下,根据上述各值的范围,使用时应使浪涌电压限定在规定的值内,且应在最靠近P、N端子处安装缓冲器(如果一个整流电路上接有多个IGBT模块,还需要在P、N主端子间加浪涌吸收器)。虽然在模块内部已对外部的电压噪声采取了相应的措施,但是由于噪声的种类和强度不同,加之也不可能完全避免误动作或损坏等情况,因此需要对交流进线加滤波器,并采用绝缘方式接地,同时应在每相的输入信号与地(GND)间并联1000pF的吸收电容。
(1)光耦合器外围控制电路
外围控制电路主要针对的是单片机控制系统的弱电控制部分,由于IPM要直接和配电系统连接,因此,必须利用隔离器件将IPM和控制部分的弱电电路隔离开来,以保护单片机控制系统。同时,IPM的工作状况很大程度上取决于正确、有效、及时的控制信号。所以,设计一个优良的光耦合器控制电路也是IPM正常工作的关键之一。根据IGBT的驱动以及逆变电路的要求,IPM内部的IGBT控制电源必须是上桥臂3组,下桥臂1组,总计4组独立的15V直流电源。
图6-51所示为几种典型光耦合器驱动电路,其中晶体管与光耦合器并联型电路对光耦合器特别有利。对控制输入的光耦合器规格要求是:CMH=CML>15kV/μs或10kV/μs、TPHL=TPLH<0.8ms、CTR>15%。
推荐使用的光耦合器有:HCPL-4505、HCPL-4506、TLP759(IGM),TLP755等,一般情况下,光耦合器要符合UL、UDE等安全认证。同时最好使光耦合器和IGBT控制端子间的布线尽量短。由于光耦合器两端间常加有大的dv/dt,因此,光耦合器两端的布线不要太靠近以减小其间的耦合电容。在使用15V的直流电源组件时,电源输出侧的GND端子不要互联,并尽量减少各电源与地间的杂散电容,同时还应当确保足够大的绝缘距离(大于2mm)。光耦合器输入用的10μF及0.1μF滤波电容主要是保持控制电压平稳和使线路阻抗稳定。控制信号输入端与VCC端应接20kΩ的上拉电阻,在不使用制动单元时,也应该在DB输入端与VCC端接20kΩ的上拉电阻,否则,dv/dt过大可能会引起误动作。
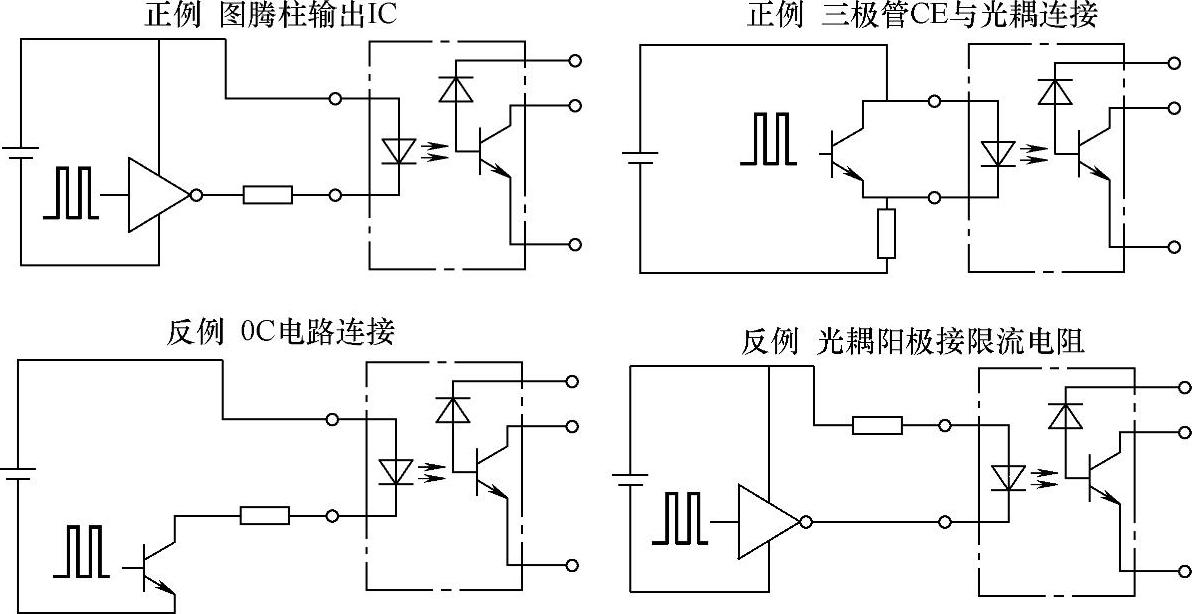
图6-51 光耦驱动电路
图6-52所示为1组上桥臂的控制信号的输入电路,其他3组上桥臂的控制信号输入电路与图6-52相同,但3组15V直流电源应分别供电。而下桥臂的4组,则共用一个15V直流电源。
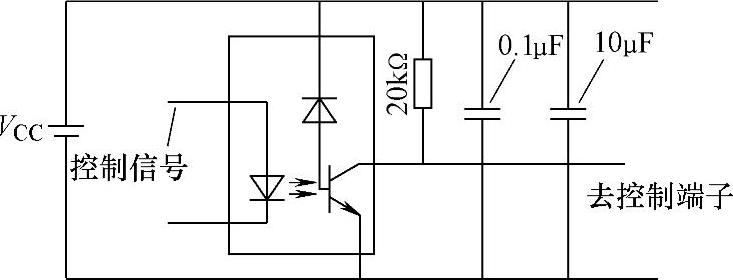
图6-52 控制信号出入电路
(2)缓冲电路
缓冲电路(阻容吸收电路)主要用于抑制IPM内部的IGBT单元的过电压和dv/dt或过电流和di/dt,同时减小IGBT的开关损耗。由于缓冲电路所需的电阻、电容的功率、体积都较大,所以在IPM内部并没有专门集成该部分电路,因此,在实际的系统中一定要设计缓冲电路,通过缓冲电路的电容可把过电压的电磁能量变成静电能量储存起来,缓冲电路的电阻可防止电容与电感产生谐振。如果没有缓冲电路,器件在开通时电流会迅速上升,di/dt也很大,关断时,dv/dt很大,并会出现很高的过电压,极易造成IPM内部IGBT器件的损坏。图6-53给出了一个典型的缓冲电路,有关阻值与电容大小的设计可根据具体系统来设定不同的参数。

图6-53 IGBT缓冲电路
6.IGBT在全桥电流源高频链逆变电源中应用
高频链逆变技术采用高频变压器来代替传统逆变器中笨重的工频变压器,大大减小了逆变器的体积和重量。根据高频变压器的功能,可将现有的高频链逆变器分成两类:电压源和电流源。电流源高频链逆变器中的高频变压器不仅能实现电隔离和电压增益的调整,而且有存储能量的功能。随着高频链技术的不断成熟,现在从结构上主要分为两类,即高频链DC/DC变换型和高频链周波变换型。
(1)高频链变换器电路结构
高频链DC/DC变换型就是在传统逆变电源的直流侧和逆变器之间加入一级DC/DC变换器,由于DC/DC变换器采用的是高频变换,所以电路中使用的是高频变压器,这样就可以省掉体积庞大的工频变压器。虽然DC/DC变换型实现起来比较容易,但是存在功率只能单向流动,负载不能向电源回馈能量;因三级功率变换,使得系统效率低,又使得系统复杂,从而降低了系统的可靠性等缺点。
图6-54所示为目前应用最广的单向电压源高频链逆变器框图,该方案只能单向传输功率,而且需要三级功率变换DC→HFAC→DC→AC,导致较高的通态损耗。
高频链周波变换型主要由高频电压源逆变器、高频变压器和周波变换器组成,该逆变器实现逆变只经过两级功率变换,降低了变换器的通态损耗和系统的复杂性,提高了系统的效率和可靠性,而且功率可以实现双向流动。
图6-55所示为双向电压源高频链逆变器的框图,该方案是目前实现双向传输功率的常用方案。该方案省去了图6-54所示方案中的DC环节,只需二级功率变换级(DC-HFAC-AC),减小了逆变器的通态损耗。然而,该方案存在一个固有的电压过冲问题:当高频变压器中连续的电流被周波变换器的功率器件换流关断时,存储在高频变压器漏感中的能量将失去其释放回路,从而导致高频变压器和周波变换器之间的电压过冲。于是,就必须采用缓冲回路或有源钳位电路来吸收这部分能量。为了解决这个固有问题,周波变换器采用基于自然换流的相位角控制方案,通过换流重叠现象将漏感中的能量释放掉或回馈给输入电源,但该方案只能适用于瞬时值电流控制系统。

图6-54 单向电压源高频链逆变器
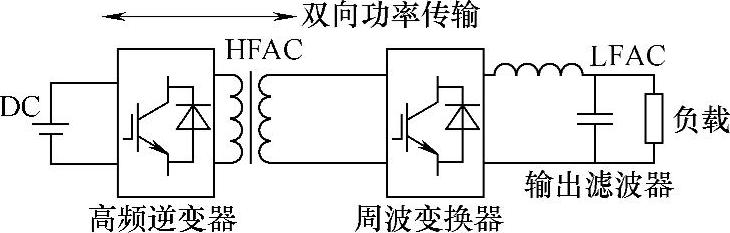
图6-55 双向电压源高频链逆变器
基于Flyback变换器拓扑结构的电流源高频链逆变器,由高频逆变器、高频变压器和周波变换器三部分组成。其高频变压器不仅能实现电隔离和电压增益调整功能,而且能存储能量。故可以省去输出滤波电感,并解决了电压源高频链逆变器的电压过冲问题。因此,电流源高频链逆变器具有紧凑的拓扑结构、简单的控制方案和良好的动态性能。另外,因电流源高频链逆变器工作在电流断续模式,导致较高的电流、电压应力和通态损耗。
(2)工作原理
图6-56所示为全桥电流源高频链逆变器的拓扑结构,由全桥高频逆变器、高频变压器和周波变换器三部分组成。该方案中的电路拓扑结构具有更简单的高频变压器结构和更低的开关电压应力。负载为感性负载(功率因数为cosφ),逆变器工作于电流断续模式。周波变换器中的开关S5、S6通常工作在工频,只有当负载向电源回馈能量时才工作于高频。但在电压源高频链逆变器中的开关功率器件始终工作于高频。因此该方案可以解决电压源高频链逆变器固有的电压过冲问题,并降低了周波变换器的开关损耗。其高频变压器只有一个副边绕组,结构简单,提高了绕组的利用率。
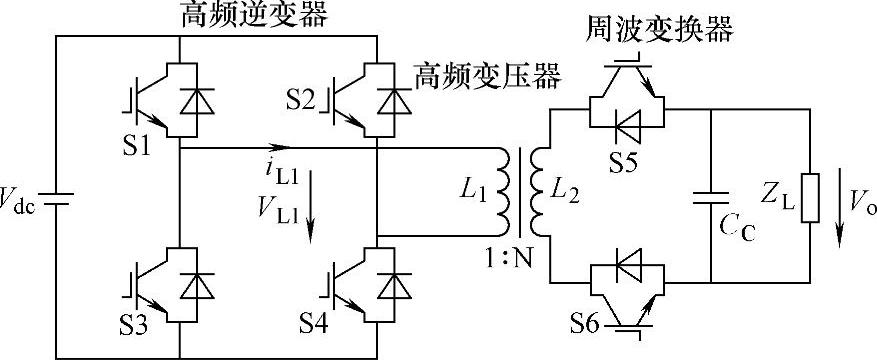
图6-56 全桥电流源高频链逆变器的拓扑结构
(3)控制方案
全桥电流源高频链逆变器的控制方案采用瞬时值电压反馈控制方案。图6-57所示为控制电路的框图,其中Vsy为基准电压的同步方波;Ve为误差电压;Vf为输出电压;Vo的反馈电压。每一个工作模式的电路拓扑结构都为工作在电流断续模式下的Flyback变换器。因此,该逆变器属于单极点系统,因此很容易设计串联反馈补偿器。
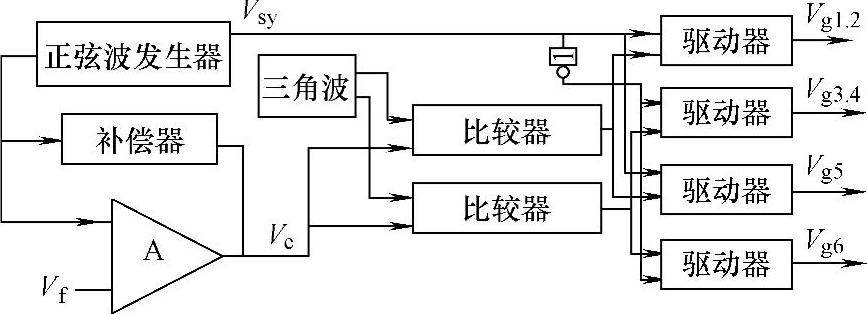
图6-57 控制电路框图
(4)主电路的设计
高频逆变器可以采用推挽式、半桥式和全桥式,周波变换器可以采用全波式、全桥式。考虑到输出电压和功率的设计要求,主电路结构如图6-58所示。图中,Vi为输入直流电压,S1、S2、S3、S4组成全桥逆变器,T为高频变压器,K1、K2、K3、K4是由2个反向串联的IGBT组成的双向开关,共同组成全桥式周波变换器,L、C组成LC滤波器。
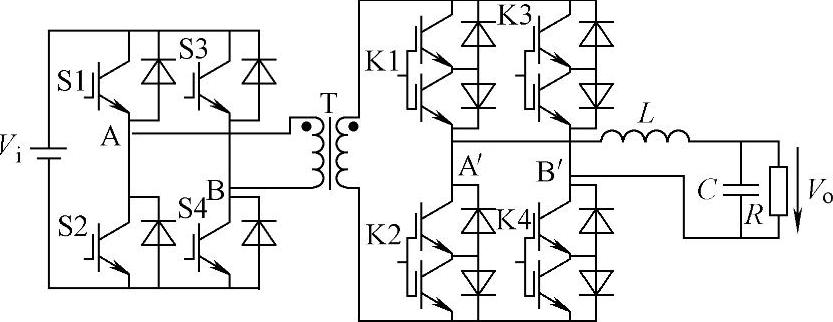
图6-58 主电路的电路结构
(5)控制方法及其实现
高频链周波变换型采用移相控制方案,移相控制是近年来在全桥变换电路拓扑中广泛应用的一种控制方式。移相控制的基本工作原理为,全桥变换电路每一个桥臂的两个开关管互补导通,两个桥臂的开关管导通之间相差一个相位,即所谓的移相角。通过调节此移相角的大小,来调节输出电压脉冲宽度,达到调节相应的输出电压的目的。
主电路的开关时序如图6-59所示,输入的220V/50Hz交流市电经过整流滤波后变成300V左右的直流电压,经过全桥逆变器的高频逆变,输出25kHz相邻脉冲互为反极性的SPWPM(正弦脉宽脉位调制)波,该波形含有SPWM波的全部信息,但不含25Hz调制波的频率成分,适合于高频变压器传输。SPWPM波通过高频变压器隔离后,用周波变换器同步整流,把25Hz正半周时间内的负脉冲翻转成正脉冲,把25Hz负半周时间内的正脉冲翻转成负脉冲之后,将得到25Hz的单极性SPWM波(如图6-59中VA′B′所示波形)。SPWM波通过LC滤波,则输出220V/25Hz的正弦交流电压。
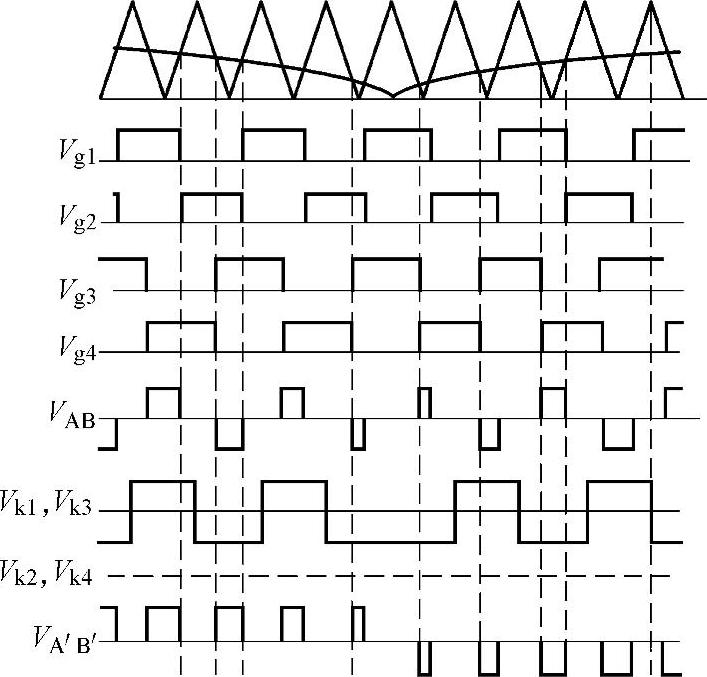
图6-59 主电路的开关时序
为了实现上述的移相控制策略,采用模拟电路实现PID调节,用数字电路CPLD(复杂可编程逻辑功率器件)来实现驱动信号的时序和逻辑控制。这种设计方法使得整个控制器的集成度提高,可靠性增强,而且为控制电路的设计提供了一定的灵活性。整个控制环节分为内环和外环两条控制电路,内环为电压瞬时值比例(P)调节,外环为电压平均值的比例积分(PI)调节。由于内环响应速度快,可以改善电压的瞬时波动造成的波形畸变,外环可以使整体的稳压特性变硬,从而达到良好的稳压效果。
移相控制电路如图6-60所示,输出电压Vo经过反馈变压器变换得到反馈电压,再经过精密整流电路后,与5V的参考电压相减,对得到的偏差进行PI调节,然后与基准正弦半波相乘得到内环瞬时电压偏差的正弦参考电压;内环的瞬时电压反馈信号经过比例环节后,与参考电压相减,得到误差信号,误差信号再经过P调节就直接与三角波比较,产生SPWM波,然后输入CPLD中,经过CPLD产生IGBT的驱动信号,其中采用VHDL(硬件描述语言)编程来实现图6-60中虚框所示的功能(分频器、地址产生器、比较器和时序逻辑发生器)。
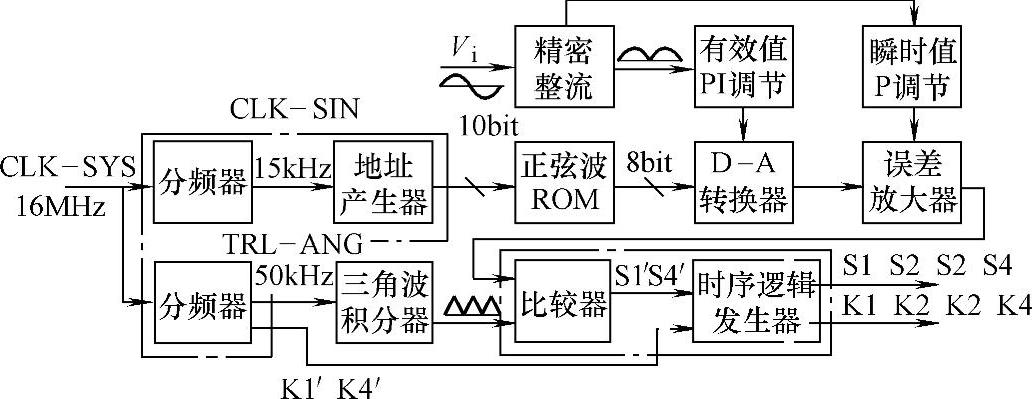
图6-60 控制电路图
(6)设计中应该注意的几个问题
变压器设计是全桥电流源高频链逆变器设计中重要的一环,设计的好坏对全桥电流源高频链逆变器的性能有很大的影响。由于所设计的变压器是高频变压器,因此,磁芯材料选用铁氧体。通过计算AP值的方法来计算变压器磁芯规格和原副边匝数,在高频变压器设计中还应注意以下事项:
1)通过实验反复修正确定最佳的参数。
2)尽量选用多股线,减少趋肤效应。
3)尽量将二次绕组绕制在内层,一、二次绕组紧密绕制,以减小二次绕组的漏感。
4)为了防止变压器的偏磁饱和,一方面,调整驱动脉冲死区,选择开关特性一致的功率开关管;另一方面,在变压器的原边串联隔直电容。隔直电容C为

式中,谐振频率fR=0.25×fs。
5)为了防止全桥逆变电路一个桥臂中的上下开关管同时导通而出现直通的情况,需要在全桥逆变电路的驱动中加入死区时间。同时,为了保证当开关管换流时,滤波电感中的电流有续流通路,要在周波变换器的驱动中加入共态导通时间。但是由于共态导通时间也造成了变压器副边瞬间短路,将产生一个很高的电流尖峰,所以共态导通时间不宜设置过长,为此,在变压器副边串入小电感来抑制电流尖峰。反射滤波电感LR为:

输出电感L为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。