



(一)雷达检测技术
雷达检测技术是最早接触和使用的用于检测车辆速度的一种技术。检测设备称为雷达测速器(或多普勒雷达),其原理是通过向运动着的物体(比如车辆)发射一定频率的无线电波,并检测物体反射回来的电波频率与发射频率的差别,利用这个差别,来计算运动物体的速度,实现对车速的检测。同时,对车辆进行计数达到统计交通流量的目的。
(二)激光检测技术
激光测速是继激光器出现以后发展起来的一门集物理、电子学和计算机知识于一体的现代科学技术。利用激光测量仪可测量物体的线速度,常用的激光测速仪主要有参考光束型和脉冲半导体型两种。由于激光为点测量行为,无论是通过多普勒效应还是激光高速测距来实现违章车辆的检测,从理论上讲是可行的并且检测精度过程都相当高,但激光检测中的激光束对人体主要是人眼的伤害是极为严重的问题。
(三)红外检测技术
红外检测技术有两种类型:主动式红外检测器和被动红外检测器。
1.主动式红外检测器
其原理和微波雷达检测器一样,但是发射频率更高(较短的波长),它可以检测车辆存在、车速、流量、占有率和车种信息,适用于白天和黑夜的情况;但它易受到天气条件的影响而发生散射。
主动式红外测速基本原理是在距离一定的两点分别放置两套相同的红外传感器,当汽车遮断第一套红外发射装置发出的红外光时,计时器开始计时;当汽车继续行驶,切断第二束红外光后,计时器停止计时。用给定的距离除以汽车通过两传感器的时间即可求得汽车的速度。
2.被动红外检测器
它本身不发射能量,而是检测目标发射的能量。通过检测道路和车辆发射能量之差,可以确定车辆存在。还可以测量流量、占有率和车辆存在信息,但一般不用于车速测量,而且天气对测量有负面影响。
(四)超声检测技术
超声波测速测距的基本原理是利用其反射特性。超声波发生器发射一定频率的超声波遇到障碍物后产生反射波,超声波接收器接收到反射波信号,并将其转换成电信号,测量发射波与回波之间的时间间隔,并根据公式R=(Δt·v)/2计算距离(v为超声波传播速度),再根据距离变化量与两次测量时间间隔之比计算车辆运动速度。
优点:方向性好,功率大,对雨、雾、雪的穿透能力强,可以在恶劣气候条件下工作,系统制作简便,成本低。
缺点:测量反应时间长,误差大,波束发散角大,分辨率低,衰减快,有效测量距离小,因此,也常用于倒车后视雷达。
(五)磁性检测技术
磁性检测技术包括感应线圈式检测技术和磁传感器式检测技术。
1.感应线圈式检测技术(https://www.xing528.com)
感应线圈式检测是在地面埋设感应线圈(或感应棒),通过感应车辆的电磁信号来换算出其速度。这种方法比较经典,检测效果也不错。如我国台湾地区、北欧的一些国家多采用此法。该检测方法的缺点是在于地面埋设感应线圈的施工量大,路面变更后需重埋线圈,另外高纬度开冻期和低纬度夏季路面以及路面质量不好的地方对线圈的维护工作都是巨大的。以感应线圈为检测对象的方法还有环型线圈式车辆检测技术。
感应式环型线圈检测器作为一个成熟的技术,具有低廉的价格,已经成为交通运营和监控系统必不可少的工具。线圈检测的数据通过通信线路传到交通管理中心,使用配置AID算法的计算机进行分析。虽然线圈可以在每秒钟读数据许多次,但是由于距离和传输的问题,只能每隔20s或30s传输一次数据。线圈可以测量交通流量、占有率和车辆速度。测量的精度取决于感应式环型线圈检测器合适的安装选位、精确操作和维护。这在实际操作过程中是比较难以掌握的,须有经验的交通工程师来完成。
2.磁传感器式检测技术
磁传感器或检测器是一个被动检测设备,本身不产生磁场,放在道路上截取磁性的扰动。当一辆汽车驶过时,使得地球磁场产生变化,磁传感器检测和捕捉异常的磁性变化,它通常用来检测车辆存在的信息。钢铁对其性能产生干扰,但是,经过实验研究,这种技术问题能够得到解决,而且其成本比其他类型的检测器都低。目前,主要使用的磁传感器有磁通门、磁阻传感器等。
(六)视频检测技术
该方法通过对连续视频图像的分析,跟踪超速车辆行为过程,通过分析控制拍照进行超速车辆抓拍。此种检测方法对检测路口的光线变化较敏感,因此图像的算法优劣是影响检测效果好坏的根本。一些成熟产品的检测效果是相当不错的,其性能价格比也较好,因此国内外应用此种检测方法的系统占主流。
按照是否需要输入人工参照信息,可将现有通过视频检测机动车行驶速度的方法划分成两类:需要对视频图像进行标定的测速方法和无须对视频图像进行标定的测速方法。目前大部分方法属于前者,后者具有代表性的是美国华盛顿大学研究的一种使用不带刻度的摄像机对车速进行估计的方法。前类方法是基于视频图像处理的道路交通参数检测方法,该方法要求将CCD安装在路面正上方,迎着车辆行驶的方向拍摄,并沿道路方向将道路分割成若干段,为了将待处理的信息量减少到必需的最小值,车辆检测仅限于感兴趣窗口。同时,该方法通过车辆模型和阴影模型来实现车辆的检测和部分地排除阴影的干扰,分析车辆区域的长度和经过某感兴趣窗口的时间可得出车辆行驶的速度。当车速大于20km/h时,测速误差明显增加,系统可靠性大幅下降。
美国华盛顿大学研究了一种使用不带刻度的摄像机对车辆速度进行估计的方法,该方法将摄像机安装在道路上方,迎着车辆行驶的方向拍摄,以330ms的时间间隔采集视频图像,对采集到的单帧图像进行预处理,移动边缘检测,形态学操作,凸面外壳和外包矩形提取。然后,对得到的凸面外壳图像进行几何分析,并利用已知车长分布统计信息和车辆在图像中的像素长度计算一段时间内车辆在路面上实际行驶的路程。该方法的不足之处在于当阴影面积达到车辆面积的2/3时,车速估计值与实际值将出现较大偏差。
在前面提到的两种方法中,前者的场景图像标定过程较为复杂,在实际应用中的可操作性较低,其测速精度和系统可靠性都得不到保证,并且未考虑多车道同时测速的情况。后者尽管省去了场景图像坐标标定的过程,但是该测速方法易受车辆阴影的干扰,精度较低。南昌大学计算机系王命延老师提出了一种高精度机动车视频测速模型,利用该模型不仅能够排除阴影对机动车视频测速的干扰,而且能够实现多辆机动车同时测速,机动车视频测速模型中场景视频图像的标定方法也具有简单直观的优点。
与传统方法相比,它有以下几个优点:
无需使用专业测速设备,可大大降低测速系统的成本。
减少了测速设备,系统简单化,使系统的工作稳定性提高,不使用专用的测速设备,自然使系统的组成简单化,从系统的角度来看,拓扑结构越简单,设备数目越少,系统工作的稳定性越高,故障率也越低。
用于车辆检测的摄像头同时可作为固定安装的监控摄像头使用,一机两用,提高了设备使用效率。
从理论上来说,视频测速技术可达到很高的测速精度,能满足实际交通工程的精度要求。
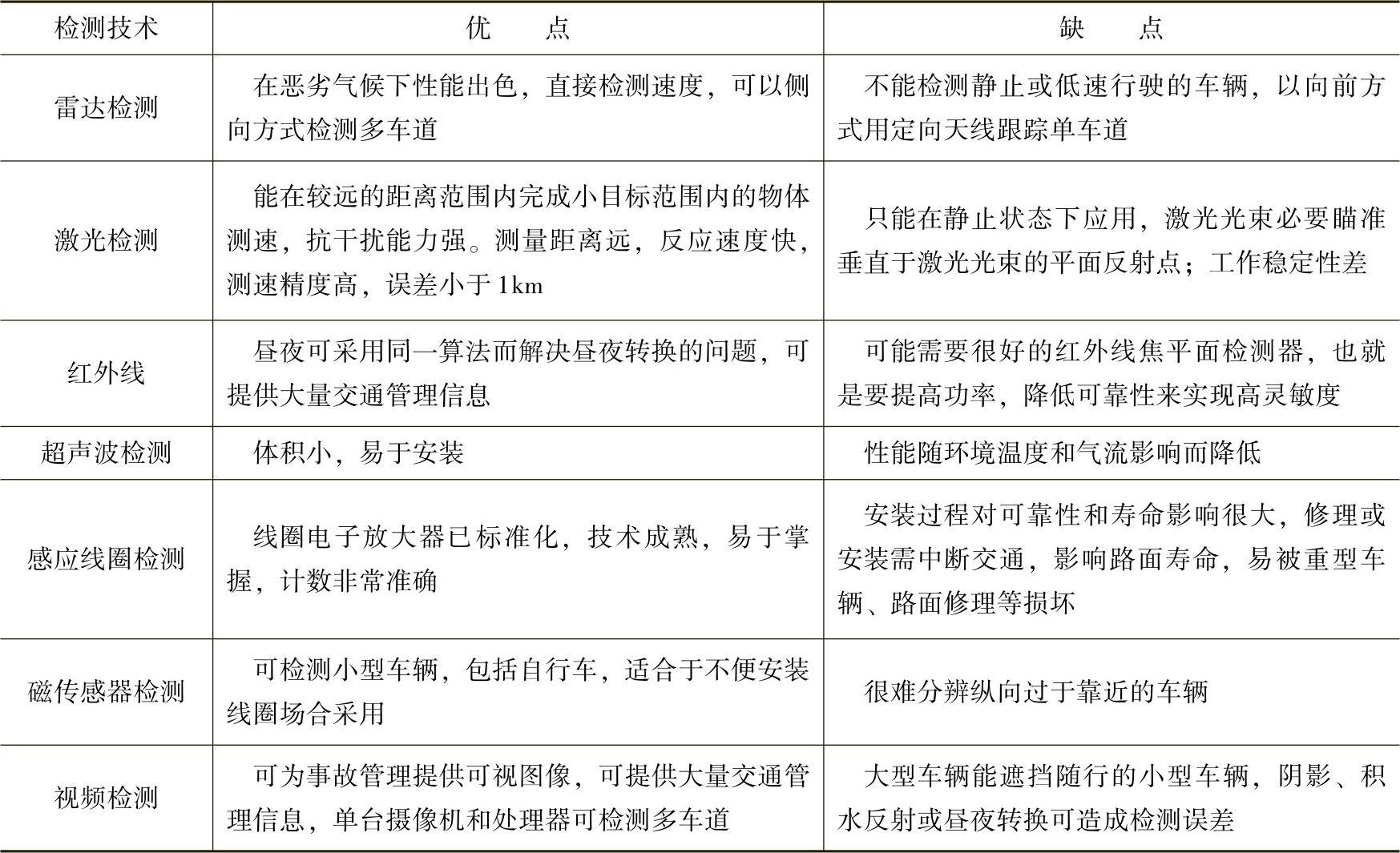
各种检测技术对比表见表8-6。
表8-6 各种检测技术对比表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。