



1.电动机回路中的控制关系
(1)连锁控制关系
电动机回路的控制属于一般的逻辑线路控制,我们来看看电动机控制电路的连锁控制和自保持,如图6-65所示。
在图6-65中两种控制方式的逻辑表达式是:

式中 KMC——接触器线圈;
KM——接触器触头;
SB1——合闸按钮;
SB2——分闸按钮;
KH——热继电器触头。
这两种方式都可实现接触器的合闸和分闸。我们从式(6-18)中看到控制方式1的SB1和 是或逻辑的关系,而控制方式2的
是或逻辑的关系,而控制方式2的 与(KM+SB1)是与逻辑关系。也就是说控制方式1中SB1在控制上是优先的,而控制方式2中
与(KM+SB1)是与逻辑关系。也就是说控制方式1中SB1在控制上是优先的,而控制方式2中 是优先的。我们把前者称为开启优先方式,后者称为关断优先方式。这种优先方式其实质上对电路乃至于对生产机械构成了约束条件。只有全面地满足了约束条件的逻辑关系才最符合实际需求,这种相互制约的而又相互联系的控制被称为连锁控制。
是优先的。我们把前者称为开启优先方式,后者称为关断优先方式。这种优先方式其实质上对电路乃至于对生产机械构成了约束条件。只有全面地满足了约束条件的逻辑关系才最符合实际需求,这种相互制约的而又相互联系的控制被称为连锁控制。

图6-65 连锁控制和自保持
(2)自锁和记忆
在式(6-18)中,我们看到控制方式2中当SB1按下后,接触器线圈得电吸合,随后接触器的常开触头KM闭合维持电流的导通,此后与SB1是否接通还是返回已经没有关系了。
我们把KM的常开接点称为自锁或者自保持接点。自锁或者自保持接点具有记忆功能,凡需要记忆的控制方式中,也一定会出现自锁环节。
要解除记忆只需要按下停止按钮SB2即可。
(3)互锁关系
我们来看图6-66所示的互锁逻辑。

图6-66 互锁逻辑
图6-66是可逆电动机回路,我们看到正转接触器KM1和反转接触器KM2的吸合存在互相制约的关系。在线位号117、119和N之间,我们看到接触器KM1的线圈上串接了 ,而KM2的线圈上串接了
,而KM2的线圈上串接了 ,也即在任何时刻,KM1和KM2中只能有一个可以吸合工作。它们之间的逻辑表达式见式(6-19):
,也即在任何时刻,KM1和KM2中只能有一个可以吸合工作。它们之间的逻辑表达式见式(6-19):

式中 ——接触器线圈;
——接触器线圈;
KMn——接触器触头;
f1/f2——对应的控制逻辑关系式。
我们再次看到相互联系又相互制约的关系,这种关系被称为互锁关系。
在电动机回路的控制方式中广泛地应用了连锁控制功能、记忆功能和互锁控制功能,可以说电动机控制电路是上述三种功能的集大成者。
2.电动机直接起动电路
我们首先看图6-67所示的电动机直接起动的控制原理图中的主回路:
在主回路中,电能从主母线中首先引入到单磁断路器QF中,再进入交流接触器KM和热继电器KH,最后从一次端子接插件通过电缆引出到三相异步笼型电动机中。
在MNS3.0低压成套开关设备的抽屉回路中,断路器QF的操作机构有个5位置,即隔离位置、抽出位置、试验位置、停止位置和工作位置。
在图6-67的操作机构左上角绘出了试验位置微动开关SW,SW只有在试验位置时才能动作,其余位置均保持原有的打开状态。SW的常开辅助触头接在线位号101和线位号103之间,与断路器QF的辅助触头并联。
当断路器操作机构手柄拨在工作位置时,交流接触器的线圈经由101线和103线之间的断路器QF动合辅助触头提供所需电能;当断路器操作机构手柄处于试验位置时微动开关SW触头闭合,交流接触器的线圈经由101线和103线之间的微动开关SW触头提供所需电能,操作者由此得以实现对接触器的通断能力做测试。值得注意的是:在试验位置时断路器的主触头和辅助触头均打开,电动机主回路因此而不带电。
图6-67中ELR是电流不平衡的测试和控制模块,其常闭辅助触头接在线位号103和线位号105之间。如果电动机在运行时发生电流不平衡则ELR的常闭触头将打开使得接触器分断,从而切断电动机的工作电源。
图6-67中SA是选择开关,当选择开关拨在“就地”档位时点1和点2被接通,当选择开关拨在“远方”档位时点3和点4被接通。
(1)“就地”档位的控制
我们来看SA拨在“就地”档位时的控制逻辑关系式:

式中 KMC——接触器线圈;
QF——断路器;
SW——试验位置微动开关;
ELR——电流不平衡控制模块;
SA——远方/就地选择开关;

图6-67 电动机直接起动的控制原理图
SB1/SB2——起动按钮/停止按钮;
START/STOP——机旁起动按钮/机旁停止按钮;
KM——接触器;
KH——热继电器。
停止按钮SB2位于图6-67中的线位号107和109之间,机旁停止按钮STOP位于线位号109和111之间,SB1起动按钮、START机旁起动按钮和KM是交流接触器的自保触头均位于线位号111和113之间。
交流接触器的线圈KM位于图6-67中的线位号113和线位号115之间,而热继电器KH的常闭触头线位号115和N之间。
当起动按钮SB1或者START按下后,交流接触器KM的线圈得电吸合,电动机进入起动状态。虽然当操作者松开起动按钮SB1/START后其触头将返回,但因为交流接触器KM的自保触头具有记忆功能,所以交流接触器的线圈仍然能得到的电能供应。
按下STOP/SB2停止按钮后接触器线圈失电而释放,电动机停止运转。
(2)“远方”档位的控制
我们再来看SA拨在“远方”档位时的控制逻辑关系式:

式中 DCS——远方控制触头。
DCS触头位于图6-76中线位号117和线位号113之间。从逻辑关系式(6-21)中我们看出,DCS控制方式不具有自锁记忆功能,因此“远方”控制点在电动机运行时控制时必须保持闭合状态。当DCS触头打开后,接触器线圈立即释放。一般地,“远方”控制模式与电力监控系统或过程控制系统配套使用。
(3)电动机过载保护
热继电器KH常闭辅助触头用于电动机过载的保护。常态下此触头保持闭合状态,当电动机过载且持续一段时间后,热继电器中的感热元件推动辅助触头变位继而使交流接触器分闸切断电动机的电源,实现电动机的过载保护。
(4)信号灯
图6-67中信号灯HL1是电动机运行指示,信号灯HL2是电动机停止指示,两则分别由KM的常开辅助触头和常闭辅助触头点燃。
信号灯HL3是故障指示,其点燃条件有两条,即热继电器动作或ELR接地故障动作。
(5)辅助回路的工作电源
图6-67中辅助回路工作电源采集自抽屉一次接插件的L1相,因此辅助回路的工作电源来自低压成套开关设备的主母线。这意味着若主母线失电则整段母线上电动机回路所有交流接触器均跳闸,交流接触器跳闸的时间大致为10~30ms。
若要防止此现象发生,则辅助回路工作电源可脱离主母线独立集中供电,也可配套UPS保持稳定可靠的电能供应。
有时独立集中供电还配套隔离变压器,以便消除电源上的尖峰脉冲电流和浪涌电流。
(6)电流测量回路
从图6-67中的主回路中可以看到电动机工作电流测量回路,电流互感器和电流表分别接在线位号是B401和N401的两侧,其中N401还通过端子X10∶1∶19保护接地。因为电动机属于三相平衡负载,所以只需要测量单相电流就可以了。
用于电动机回路的电流互感器过载倍数必须达到8倍,以适应电动机起动电流的冲击。
图6-67也可用于使用单磁MO325断路器的小功率电动机直接起动电路中。
3.电动机正反转起动电路
将三相异步电动机的定子绕组所接的三相电源任意两条电源线对调,则旋转磁场将反向,电动机转子的旋转方向也将反向。
图6-68所示为正反转直接起动的控制原理图。
我们首先来看正反转直接起动的控制逻辑关系式:
 (https://www.xing528.com)
(https://www.xing528.com)
式中 KM1C/KM2C——正转交流接触器线圈/反转交流接触器线圈;
QF——断路器;
SW——试验位置微动开关;
ELR——电流不平衡控制模块;
SA——远方/就地选择开关;
SB1/SB2/SB3——正转起动按钮/反转起动按钮/停止按钮;
START1/START2/STOP——机旁正转起动按钮/机旁反转起动按钮/机旁停止按钮;
DCSRSB1/DCSRSB2——远方正转控制/远方反转控制;
KM1/KM2——正转交流接触器/反转交流接触器;
KH——热继电器。
从式(6-22)中,我们看到了在就地控制中有自保持触头KM1和KM2,有互锁触头 和
和 ,但在远方控制中有互锁触头
,但在远方控制中有互锁触头 和
和 却没有自保持触头,所以在就地控制方式中具备自保持功能和互锁功能,但在远方控制中就只有互锁功能了。
却没有自保持触头,所以在就地控制方式中具备自保持功能和互锁功能,但在远方控制中就只有互锁功能了。
我们来看图6-68中的一次回路,交流接触器KM1和KM2的一次接线输入端相序未发生变化,但在KM1和KM2的输出端相序发生了变化,其中L1相与L3相互相对调,由此实现了电动机的正转和反转。
图6-68中线位号113和117之间是KM1的起动按钮SB1、就地起动按钮START1,还有KM1的自保持触头;线位号115和119之间是KM2的起动按钮SB2、就地起动按钮START2,还有KM2的自保持触头。这些接线都与直接起动电路类似。
从线位号117到N之间串接了KM2常闭触头和KM1的线圈,其中KM2常闭触头就是KM2对KM1的合闸互锁触头;类似地,从线位号119到N之间串接了KM1常闭触头和KM2的线圈,其中KM1常闭触头就是KM1对KM2的合闸互锁触头。
接在线位号109到111之间的SB3是停止按钮。因为停止按钮SB3只有1个,所以电动机要转换旋转方向时必须首先停机,然后才能反方向起动。
接在线位号103到111之间的是三相不平衡继电器的常闭辅助触头ELR、热继电器的常闭辅助触头KH,以及选择开关SA的“就地”位置点1和点2。选择开关SA的“远方”位置点3和点4在线位号107到125之间。
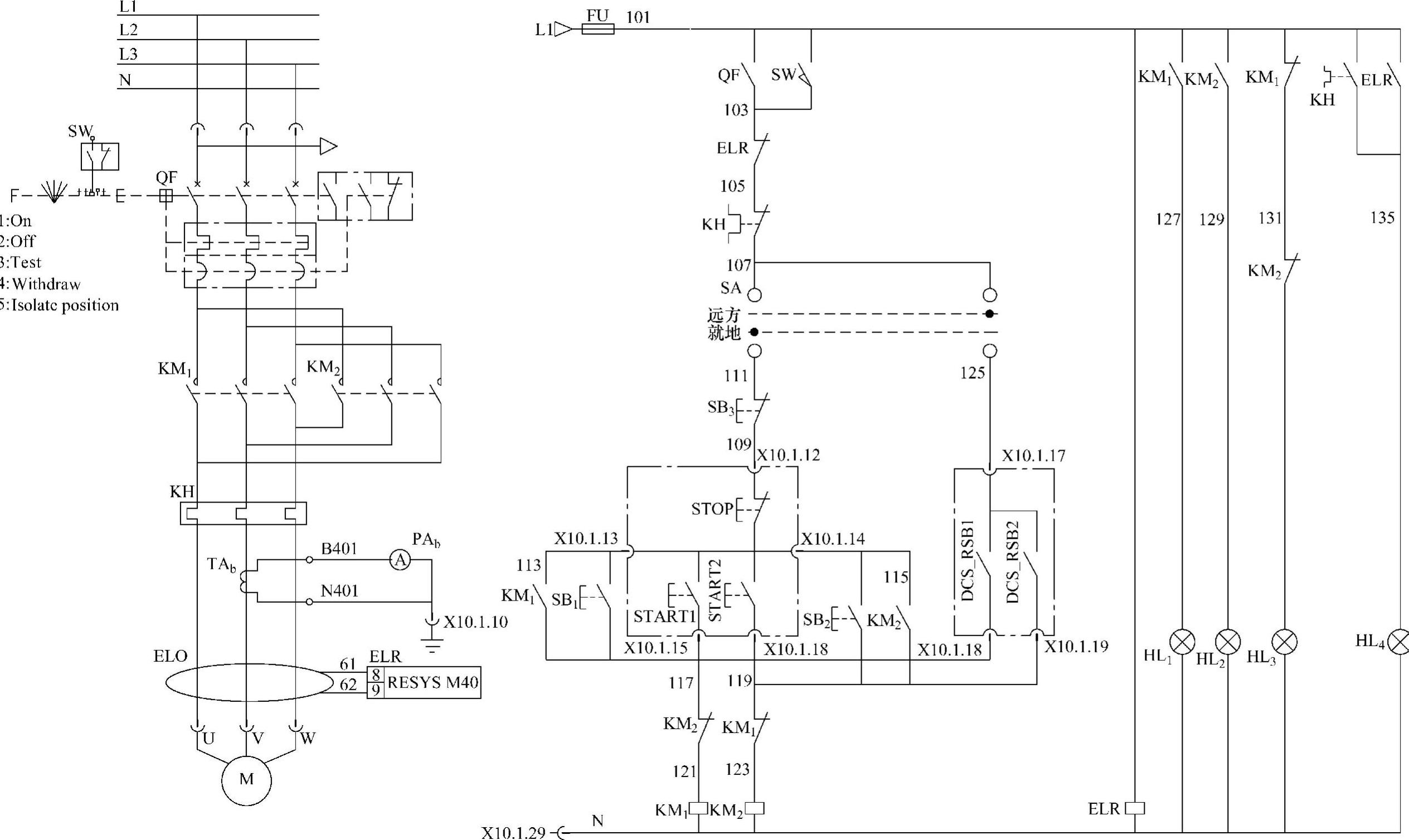
图6-68 电动机正反转起动的控制原理图
图6-68的信号灯指示回路中,HL1受控于KM1辅助常开触头,指示出电动机正处于正转运行;HL2受控于KM2辅助常开触头,指示出电动机正处于反转运行;HL3同时受控于KM1的常闭辅助触头和KM2的常闭辅助触头,指示出电动机停止运行;HL4受控于热继电器KH或不平衡电流继电器ELR,当两者之一在切断电动机电源的同时将HL4信号灯点燃,指示当前系统中发生了故障。
与图6-67中的QF和SW之间的关系一样,图6-68中的SW也是用于断路器操作手柄处于试验位置时接通辅助回路,以便进行接触器吸合状态的试验。在试验位置上短路QF没有闭合,因此电动机正反转控制主回路中不带电。
4.电动机 -△起动电路
-△起动电路
电动机 -△(星-三角)起动的控制原理图如图6-69所示。
-△(星-三角)起动的控制原理图如图6-69所示。
图6-69中KM1是主控和过载保护接触器,KM2是三角运行接触器,KM3是星形起动接触器。
当电动机刚起动时,首先KM1先闭合,接着KM3再闭合,此时电动机处于 起动状态;KM1在闭合时又启动了时间继电器KT,当电动机在
起动状态;KM1在闭合时又启动了时间继电器KT,当电动机在 状态下运行到达预设时间后,KT将
状态下运行到达预设时间后,KT将 起动接触器KM3打开,△运行接触器KM2合闸投运。KM3与KM2之间设置了互锁关系。
起动接触器KM3打开,△运行接触器KM2合闸投运。KM3与KM2之间设置了互锁关系。
在图6-69中,可以看到电动机 -△起动主回路的测量回路、过载保护和电流不平衡保护与正反转直接起动电路类似。
-△起动主回路的测量回路、过载保护和电流不平衡保护与正反转直接起动电路类似。
我们来看图6-69中的电动机 -△起动的就地控制逻辑关系式:
-△起动的就地控制逻辑关系式:
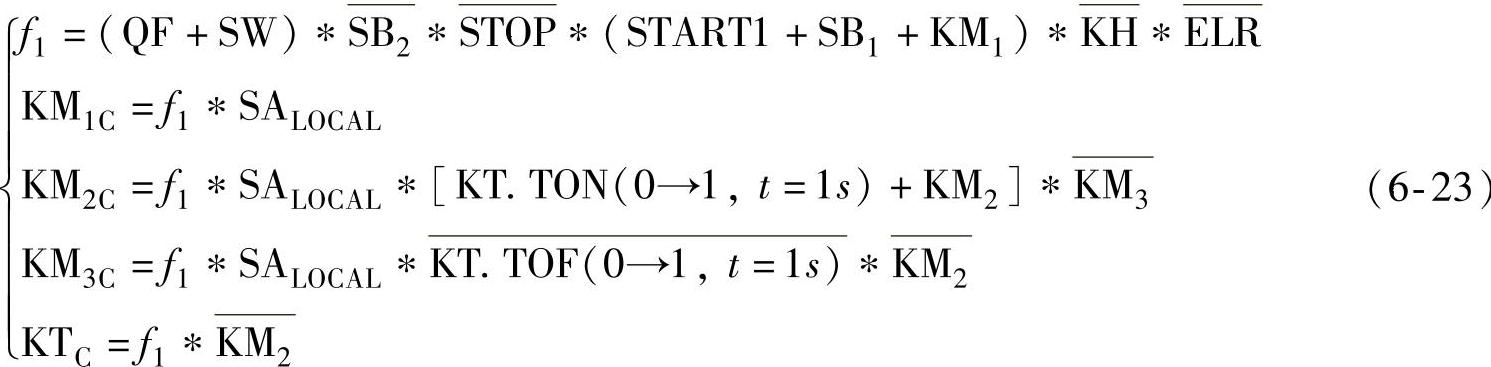
从式(6-23)中我们可以看出KM1C的逻辑表达式中具有KM1项,因此KM1接触器具有自锁记忆功能;同理,KM2C的逻辑表达式中也具有KM2项,因此KM2接触器也具有自锁记忆功能。
从式(6-23)中我们可以看出KM2C的逻辑表达式中有 项,而KM3C的逻辑表达式中有
项,而KM3C的逻辑表达式中有 项,所以星接接触器KM3与角接接触器具有互锁功能,两者互相排斥。
项,所以星接接触器KM3与角接接触器具有互锁功能,两者互相排斥。
从式(6-23)中我们可以看出KM3C的打开条件是:KT延迟时间到后利用其常闭触头将星接接触器打开;我们还可以看出KM2C的闭合条件是:KT延迟时间到后利用其常开触头将角接接触器闭合。
我们来看图6-69中的电动机 -△起动的远方控制逻辑关系式:
-△起动的远方控制逻辑关系式:

从式(6-24)中可以看出,KM1C已经不再有自锁功能,它完全随着DCS远方触头的变
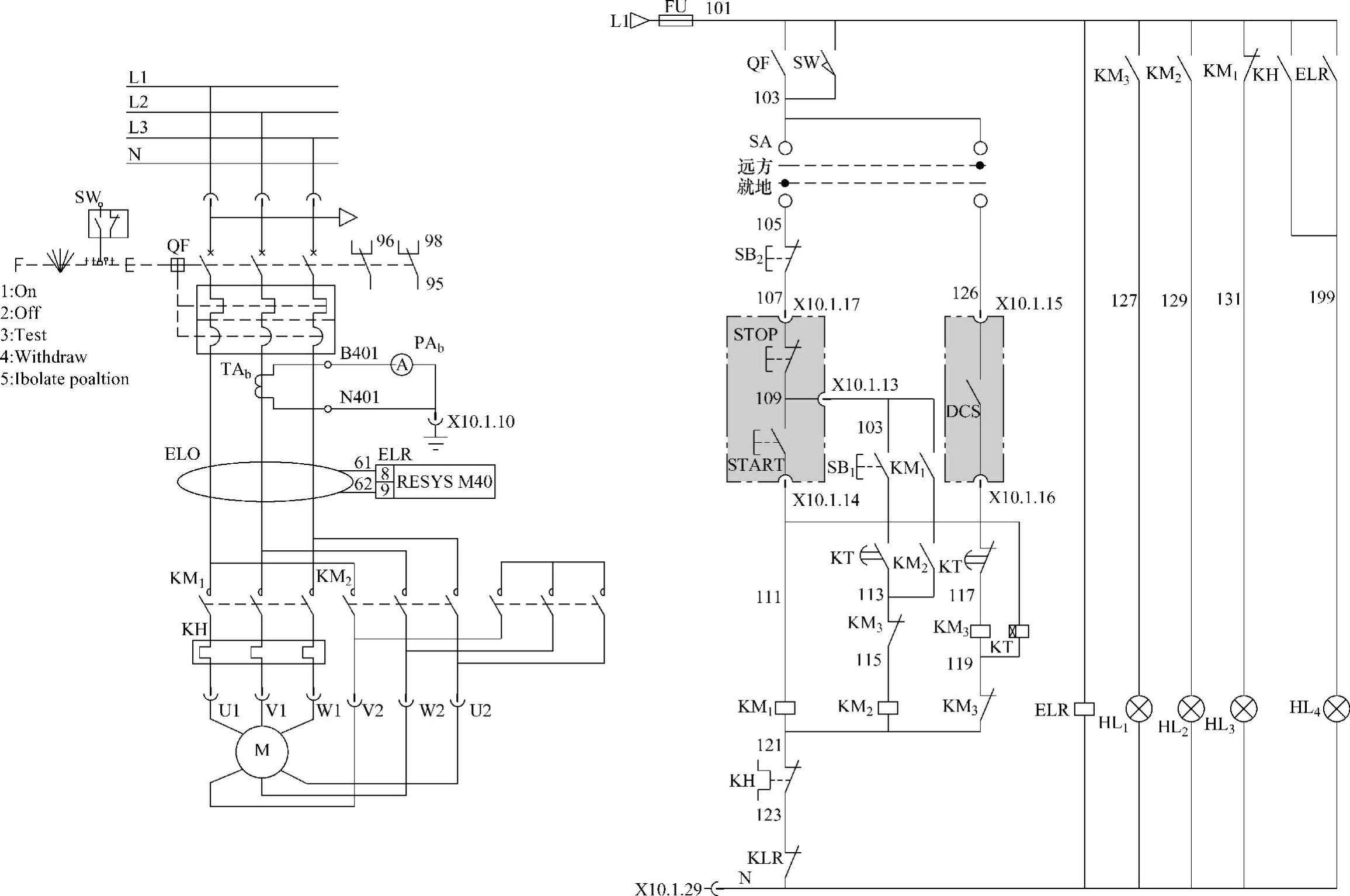
图6-69 电动机星-三角起动的控制原理图
位而闭合与打开;KM2C、KM3C和KTC则与就地操作模式下的逻辑表达式类似。
我们来仔细看看图6-69中各个接触器的工作过程:
当线位号109和111之间的起动按钮SB1按下后,主接触器KM1线圈得电,KM1闭合并对SB1实施自保,线位号111和119之间的时间继电器KT线圈进入延时计时,同时星形起动接触器KM3的线圈也得电闭合,电动机就此进入 起动状态。
起动状态。
接在线位号111和117之间的KT得电延时打开辅助触头控制着KM3接触器的线圈,接在线位号111和113之间的KT得电延时闭合辅助触头控制着KM2接触器的线圈。当KT的延迟时间到达后,这一对辅助触头动作使得KM3失电分断,而KM2得电闭合同时利用自身的常开辅助触头实现自保,电动机就此进入△运行状态。
KM2线圈上串接了KM3的常闭辅助触头,而KM3线圈上串接了KM2的常闭辅助触头,两者的辅助触头构成互锁关系。
线位号119和121之间的KM2的常闭辅助触头打开后不但切除了KM3的电源,也同时切除了时间继电器KT的电源,使得KT线圈不至于长时间地带电发生故障。
线位号123和111之间的是DCS的遥控触头。当操作模式选择开关SA拨在“远方”位时,过程控制系统DCS可直接操作电动机的起动和停止。
在图6-69的信号灯指示回路中,HL1受控于KM3辅助常开触头,指示出电动机正处于星形起动运行;HL2受控于KM2辅助常开触头,指示出电动机正处于三角形运行也就是正常运行状态;HL3同时受控于KM1的常闭辅助触头,指示出电动机控制回路停止运行或者系统已经带电;HL4受控于热继电器KH或不平衡电流继电器ELR,当两者之一在切断电动机电源的同时将HL4信号灯点燃,指示当前系统中发生了故障。
5.用ABB的M102-M(P)构建电动机控制电路
ABB的电动机综合保护模块M102的具体说明可参见6.3.4节相关部分。表6-34~表6-37是M102-M的端子定义:
表6-34 M102的X1端子定义

表6-35 M102的X2端子定义

表6-36 M102的X3端子定义

表6-37 M102的X4端子定义

M102-M的接线如图6-70所示。
用M102-M构建的电动机直接起动接线图如图6-71所示,用M102-M构建的电动机正反转起动接线见图6-72,用M102-M构建的电动机 -△起动接线如图6-73所示。
-△起动接线如图6-73所示。
(1)关于PTC的接线
PTC是埋在电动机定子绕组中的热敏电阻,用来测量电动机定子绕组的温度。若电动机未连接PTC电阻,则M102-M的X1:14~X1:16要短接。
(2)关于KM(L)和KM(N)工作电源
工作电源可来自母线,也可来自专门配套的互投电源。

图6-70 M102-M的接线图
工作电源首先接入STOP1急停按钮。急停按钮下部的QF是断路器辅助触头,与QF并接的SW是断路器操作机构的试验位置触头;选择开关SA决定了电动机的操作模式。因为断路器的辅助触头状态反馈、合闸和分闸控制按钮的状态反馈、交流接触器的状态反馈等信号均接在DC 24V回路,所以SA选择了“手动”模式时必须接通上述电源通道,同时还要接通了交流接触器的工作电源通道,而当SA选择了“远方”模式时则仅仅接通交流接触器的工作电源通道即可。

图6-71 M102-M构建的电动机直接起动接线图

图6-72 M102-M构建的电动机正反转起动接线图

图6-73 M102-M构建的电动机 -△起动接线图
-△起动接线图
(3)关于操作面板HD
HD与M102-M之间的连接符合RS485规约,采用专用的电缆连接。
用户可在HD面板上操作电动机起动与停止,还可查阅电动机的工作电流等信息。
(4)关于M102-M的电流输入互感器
M102-M的电流输入互感器最大测量值为63A,若大于63A则需要外接电流互感器。外接电流互感器的过载倍数必须在8倍以上。
(5)关于M102-M的双RS485通信接口
从图6-71~图6-73中可以见到M102-M上独立的双套RS485通信接口的特殊用途:M102-M可以在2条不同的串行链路中同时向两处上位系统发送信息,或者与一套上位系统实现冗余通信功能。
独立的双套RS485接口也是ABB的M102-M区别于其他品牌MCU模块的特征。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。