



图6-47所示为具有双路进线和单母联的低压配电系统。注意到变压器低压侧有采集低电压信号的标记。我们用此范例来构建PLC备自投系统。
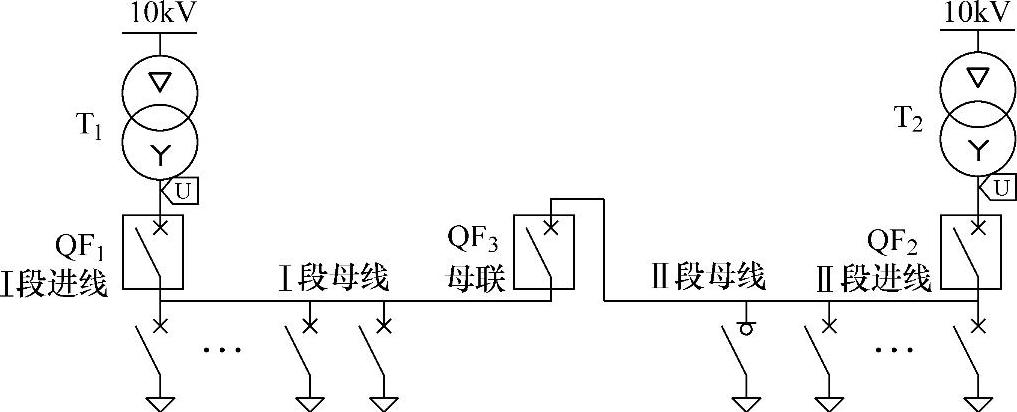
图6-47 利用PLC实现备自投操作的低压配电范例系统
考虑到读者在实践中会配套任意型号的PLC,随后的程序编程语言将用IEC61131.3通用图形形式来表述,以便读者使用和移植。关于IEC61131.3标准的通用PLC编程语言图形形式见本章的6.5.2节给出的相关描述。
1.基于母联的低压进线、母联备自投控制原理概述
(1)范例系统的低电压测量
两套低压进线主回路均采用最通用的单相低电压继电器采集低电压信号。低电压继电器当电压正常时其动断辅助触头打开,发生欠电压或者失电压时动断辅助触头返回,即

值得注意的是,常规单相低电压继电器在动作临界点会发生触头抖动,若使用常规继电器构建控制系统需要配时间继电器;用PLC则需要在控制程序中配套防抖措施。
(2)低压配电系统的操作说明
1)低压配电系统首次送电。低压配电系统首次送电必须采用手动操作:手动操作两市电进线断路器合闸,母联断路器仍然保持分断状态,低压配电系统就此进入正常工作状态。
这里的手动操作并不是专指手动操作模式,也可在自动模式下利用控制按钮使得两市电进线断路器合闸。首次送电采用手动操作是必要的,这样能确保低压配电网的安全性。
2)低压备自投系统的操作模式。备自投系统操作模式有四种,即
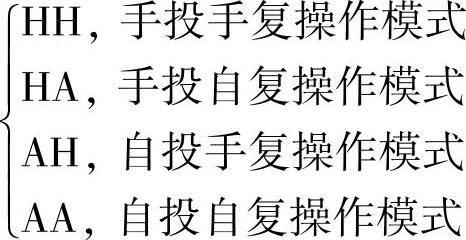
这里的“投”是指母联断路器,“复”是指进线断路器,也即针对母联的低压备自投操作系统。
●HH操作模式
HH操作模式即手动操作方式。在此操作模式下,所有断路器均由人工通过控制按钮实现合分闸。在HH模式下,若低压配电系统发生了失电压或欠电压,则对应的进线断路器会跳闸,但闭合母联断路器的操作为手动;当电压恢复后,分断母联断路器和投入对应的进线断路器也需要手动。
遥控也被归于HH操作模式中。
遥控是由远方的电力监控系统操控的。一般来说,就地控制的权限高于遥控的权限,因此在就地的控制面板上需要安装就地/远方选择开关以实现权限选择。在本范例中,认为遥控的权限高于就地控制。当遥控指令发出后,备自投程序会自动转向执行遥控命令而忽略就地控制命令。
●HA操作模式
当出现失压时,在HA操作模式下备自投首先自动打开相应的进线开关,并且给出告警信息。投入母联开关的操作需要由人工实施,但当电压恢复后的打开母联闭合进线等操作是自动进行的。
在这里,我们再次看到基于进线的备自投和基于母联的备自投在“投”和“复”方面的区别。基于母联的备自投中的“投”指的是母联,“复”指的是进线;而基于进线的备自投的“投”指的是进线,“复”指的是母联。
一般地,基于进线的备自投适用于用继电器构建的控制系统,而基于母联的备自投适用于PLC构建的控制系统。
●AH操作模式
当出现失压时,在AH模式下备自投首先自动打开相应的进线开关,接着自动投入母联。当电压恢复后,须要由人工执行打开母联闭合进线的操作。
●AA操作模式
在AA操作模式下,一切都是自动的。当出现失压时,备自投程序首先让对应的进线断路器跳闸,再闭合母联断路器;当市电电压恢复后,备自投在确认电压正常后先分断母联断路器,再闭合进线断路器。
若市电发生了双路失电压或欠电压,则备自投将启动故障处理程序。故障程序在对电压信息延迟判误后分断两进线断路器,随后发出起动发电机的命令。当发电机的电压正常后,故障程序将闭合发电机进线断路器和母联断路器;当某路市电电压恢复后,故障程序将启动恢复程序:恢复程序首先分断发电机进线,再闭合对应的市电进线和母联断路器,最后发出停止发电机工作的命令。至此,系统从故障处理程序中返回到备自投程序中。
(3)低压系统的状态
低压系统的状态中隐含着互锁关系:即两进线和母联三者之间任何时刻只能闭合两台。例如STATU4为两进线闭合母联打开,STATU8为两进线打开而母联闭合。于是STATU4就成为系统的最终工作状态,而STATU8则为非法状态。
备自投程序在本质上是引导电力系统通过断路器的投退切换从其他运行状态向最终运行状态STATU4逼近,直至系统进入STATU4为止。
图6-47所示低压配电系统共有8个可能状态,见表6-32。
表6-32 电力系统状态

注:“0”表示断路器处于打开状态,“1”表示断路器处于闭合状态。
与用继电器构建的控制电路不同,备自投控制程序中用进线、母联的系统状态来决定断路器的投退关系及互锁关系,这也是备自投控制方式区别于常规继电器控制方式的最主要特征之一。
2.备自投程序中的基本变量和模块
编程语言中的功能图块即IEC 61131-3标准中的编程语言图形形式。功能图块构建的编程语言将各种功能块连接起来实现所需控制功能,它来源于信号处理领域。功能图块编程语言的图形符号由功能、功能块和连接元素等构成。
我们来看一些简单的功能图块:
(1)开关量输入DI和延迟时间模块TON
在程序中对于所有的开关量遥信输入值均作了100ms的防抖动延迟判误,以避免出现触点误动现象。延迟时间从20ms到100ms可调。
开关量输入和延迟时间模块TON如图6-48所示。
图6-48中,SB11_STATE是合闸按钮的DI遥信量(开关量),接在TON模块的输入“IN”端口;SB11为合闸按钮状态变量,接在TON模块的输出“Q”端口。从SB11_STATE=1到SB11=1经历了100ms的延迟;TON中的T100是延迟100ms的时间常数常量,T100接在TON的“PT”接口上;最后%MD001.01为减法计数器变量,接在TON的“ET”接口。
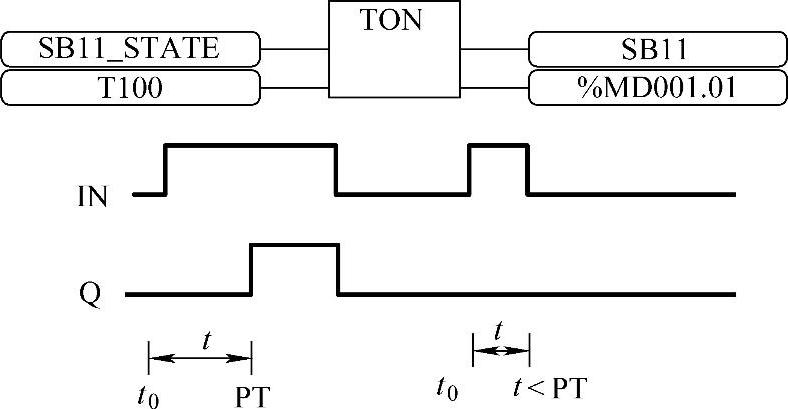
图6-48 TON延时模块和时序图
TON相当于通电延时继电器,其中t的延时时间从1ms(毫秒)到1year(年),TON的定义见本章6.5.2节。
我们从TON的时序图中可以看到:当输入信号IN有效的时长大于或者等于t时,输出Q=1,否则Q=0,即
(2)OR图块和AND图块(见图6-49)
图6-49中OR为或图块,其输出为2输入变量的逻辑和;图中AND为与图块,其输出为3个输入变量的逻辑积。OR模块和AND图块的输入个数是可以设定的。

图6-49 TP脉冲输出模块
图6-49中AND图块的输入端有小圆圈表示求反操作。例如图中AND图块的输出Q等于:

OR和AND的定义见PLC编程语言的IEC 61131-3标准。
(3)TP定宽脉冲发生器图块
对于PLC的出口继电器来说,由于出口继电器的控制对象是断路器的合分闸电动操作机构,所以出口继电器的动作特征为时间宽度固定的单次脉冲动作方式。这里的时间宽度为断路器电动操作机构动作时间长度的2倍,一般为150ms。
当TP是定宽脉冲发生器图块。当图6-49中TP的输入端(AND的输出)有效时,TP将输出脉宽为150ms的脉冲。
TP图块的左下角“PT”接150ms延时时间常数常量,右下角为减法计数器,右上角即为TP图块的输出端口“Q”。我们看到驱动进线断路器QF1合闸线圈执行断路器闭合操作的出口继电器QF1YC其动作的维持时间是150ms。
我们来看TP模块的时序图6-50。从图6-50中可以看出:当TP模块的输入IN=1时,输出Q出现一个宽度为PT的脉冲,且脉冲有效期间与IN的状态无关。
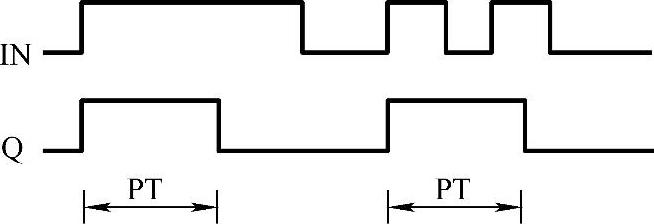
图6-50 TP定宽脉冲发生器图块的时序图
TP的定义见本章6.5.2节有关IEC 61131-3标准编程语言图形形式的说明。
在图6-49中,一旦AND输出有效,则TP就通过继电器输出变量QF1YC使得出口继电器产生150ms的合闸脉冲。
3.范例系统的电气接线
图6-51所示为母联主回路和辅助回路,图6-52所示为Ⅰ段进线主回路和辅助回路。
从图6-51中可以看到,PLC的开关量输入信号从左至右分别为母联断路器的状态QF3、母联断路器的保护动作状态KA6、合闸按钮SB1和分闸按钮SB2、自动/手动选择开关SA3、HA操作模式、AH操作模式和AA操作模式。
图6-51中的出口继电器YCKA31和YOKA32用来对母联断路器实施合闸和分闸操作,出口继电器KAG专用于对发电机实施起动和停止操作。
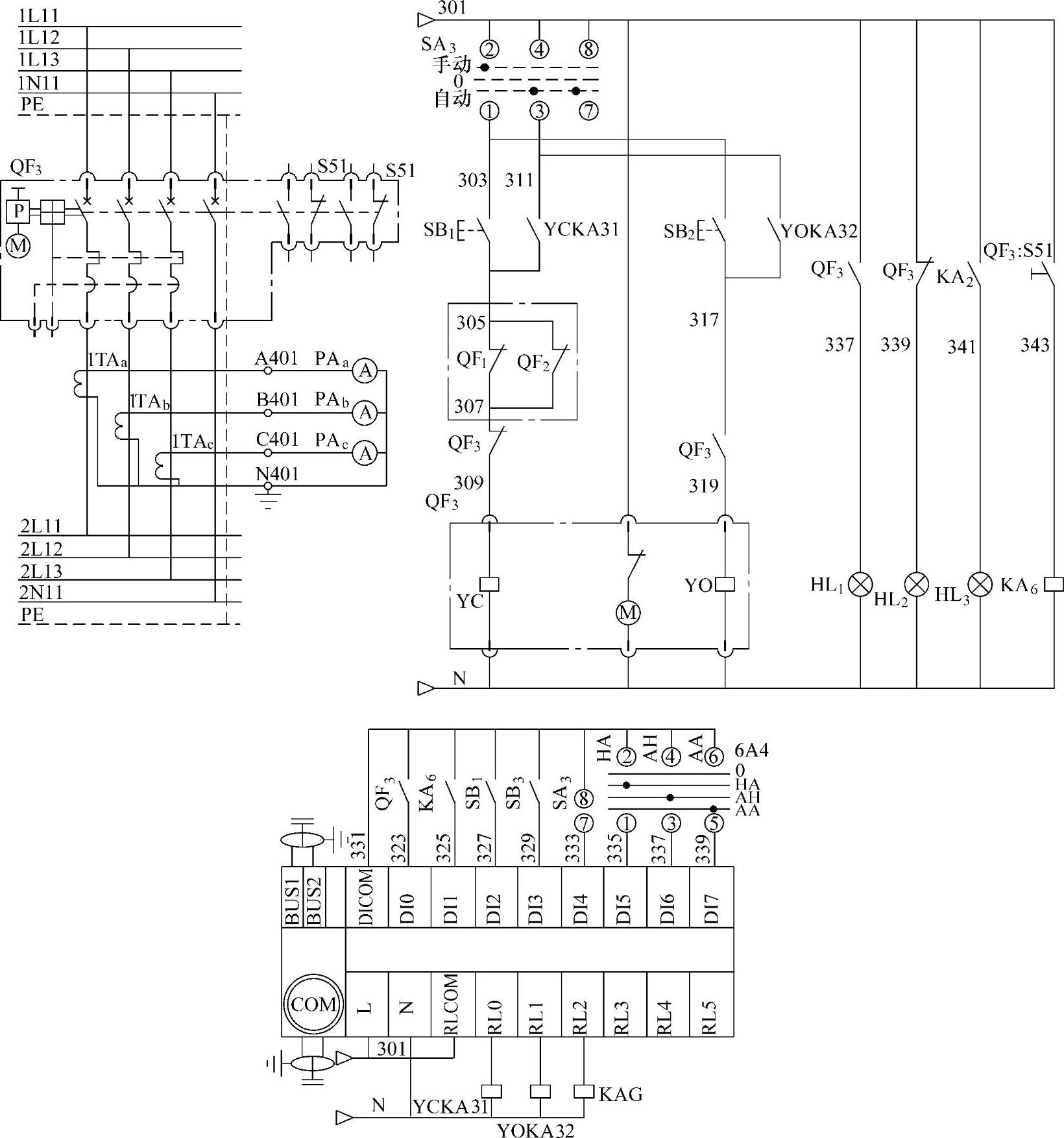
图6-51 利用PLC实现测控的范例系统母联主回路和辅助回路
从图6-52中可以看到,当Ⅰ段进线控制原理图中的选择开关SA1拨在手动档时,Ⅰ段进线QF1断路器的合分操作可通过合闸按钮SB1和分闸按钮SB2实现;当选择开关拨在自动档时,Ⅰ段进线QF1的合闸操作由中间继电器YCKA11执行,分闸操作由中间继电器YOKA12执行,而YCKA11及YOKA12均为PLC的出口继电器,它们的合分操作均由备自投程序安排和指挥。
注1:
对于PLC主机来说,查询和检索远程功能扩展单元要通过硬件地址来确定。Ⅰ段进线使用的远程功能扩展单元地址为02,Ⅱ段进线使用的远程功能扩展单元地址为03,发电机进线使用的远程功能扩展单元地址为04,PLC主机的地址为62。
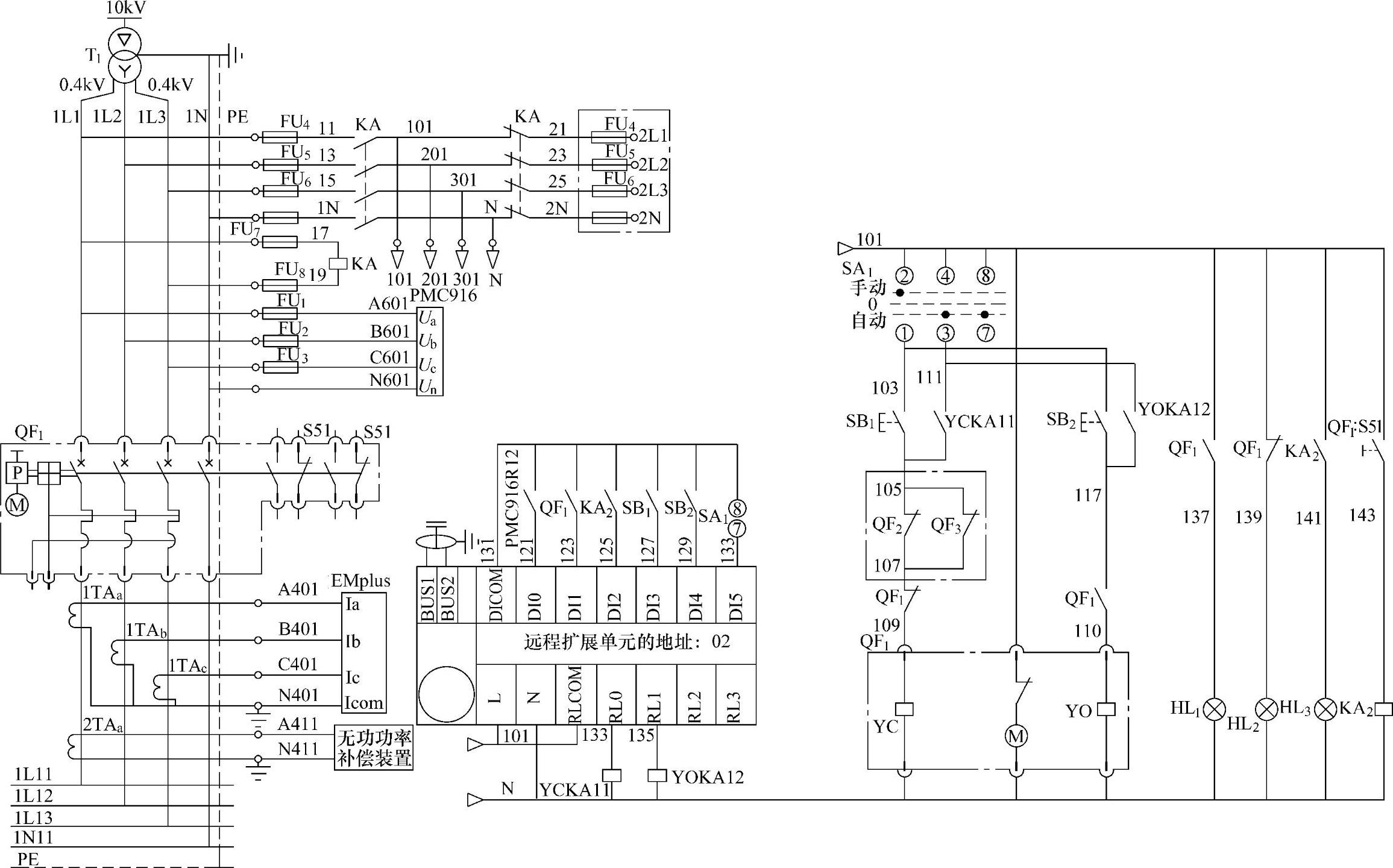
图6-52 利用PLC实现测控的范例系统Ⅰ段进线主回路和辅助回路
注2:
利用PLC实现对低压成套开关设备测控的要点是:
1)若被测控对象散布在低压配电所的不同地点,或者散布在不同的配电所中,为了避免大量的接线,可采用分布式远程功能扩展单元来采集和输出控制信息。远程单元与PLC主机之间通过通信电缆连接和交换信息。
2)PLC读取数据是通过地址进行的。在PLC构成的系统中,任何一个功能模块,包括全部的开关量输入输出接口和模拟量的输入输出接口,都有明确的地址与其对应。见表6-33。
表6-33 范例系统的参量名称和地址
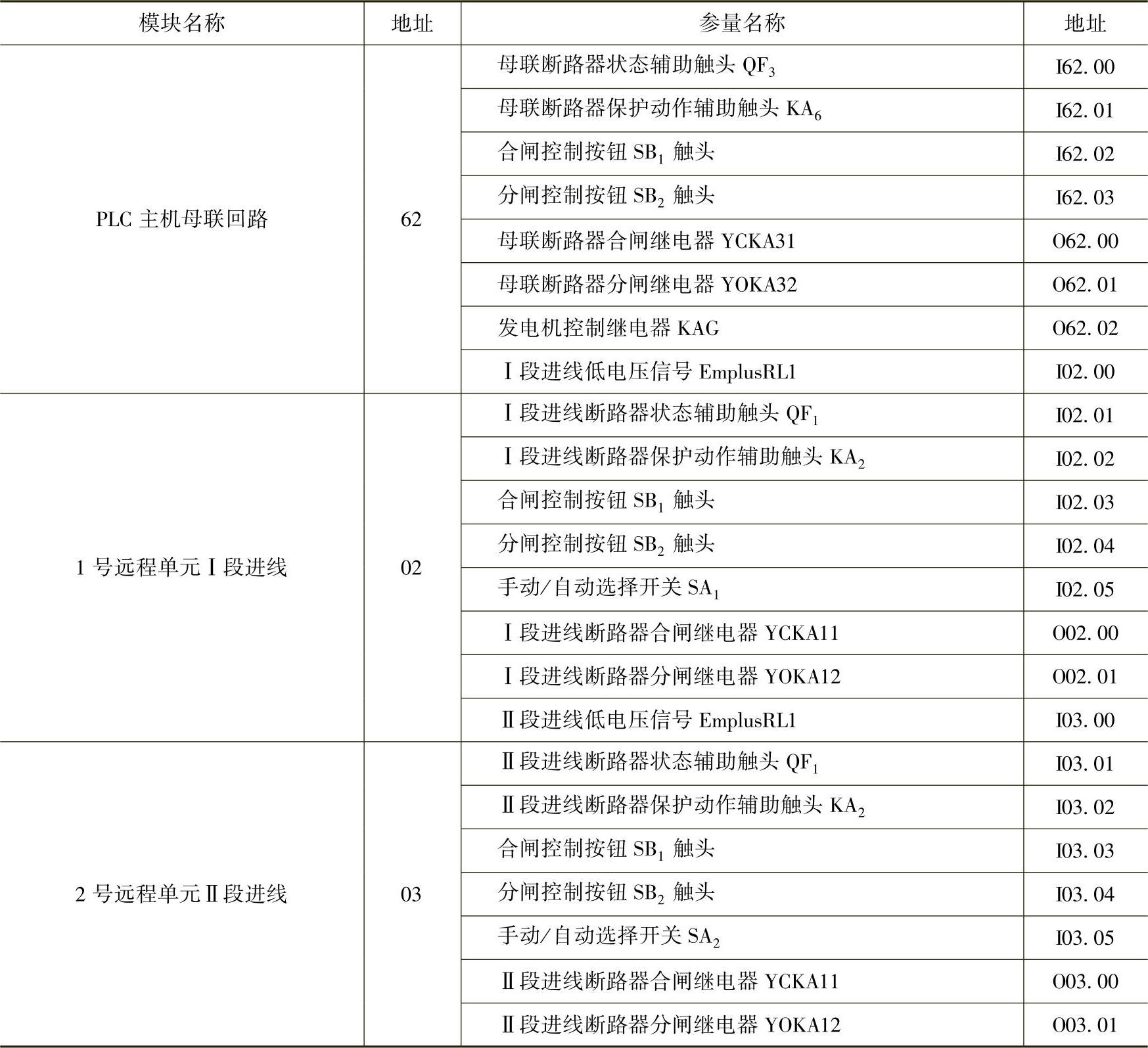
从表6-32中我们看出,PLC测控体系中所有的输入输出开关量连同各种模块一起成为一个整体。系统内任何开关量发生变位,都会引起备自投程序发生相应的连锁反应。
我们来看图6-53。图6-53反映了系统中各个模块之间的网络拓扑关系。
对于AC500系列PLC,各个模块之间的通信符合Profibus-DP规约,通信速率可达15Mbit/s。ABB早期中档PLC系统间通信采用RS485/MODBUS-RTU规约,通信速率19.2kbit/s,系统间数据交换也仅耗时0.05ms左右。
从图6-53中我们能看出分布式配置方案充分利用了现场总线技术,各种模块按需求分布在低压成套开关设备中,接线灵活,控制方便,大量减少了系统接线,提高了可靠性。
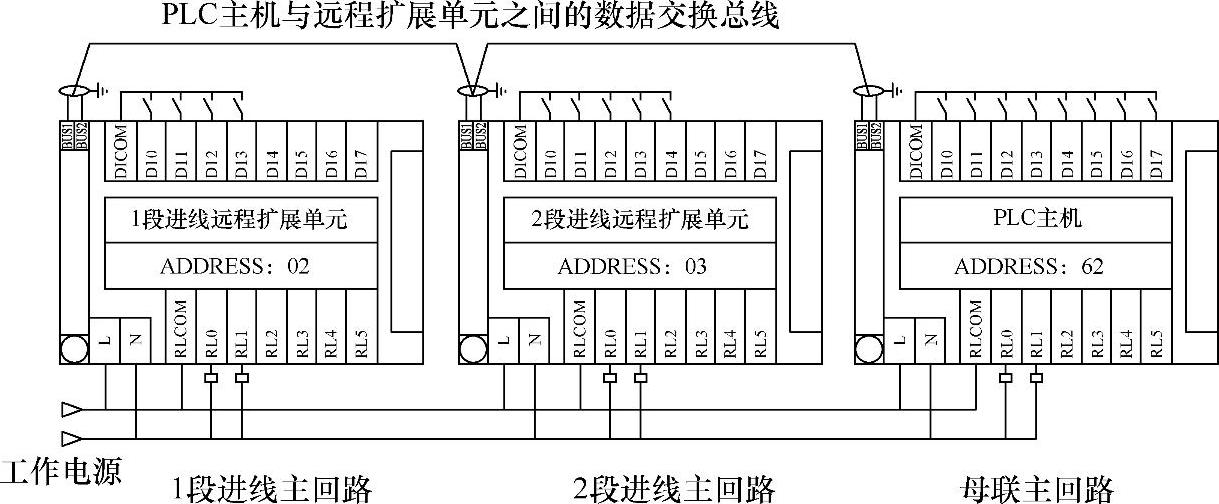
图6-53 范例系统PLC主机与分布式远程扩展单元的网络拓扑关系
(3)PLC系统的工作电源
图6-54所示为辅助回路的电源供给简图,其中T1和T2为电力变压器,101/201/301/N为辅助工作电源输出。PLC的工作电源要确保有稳定的电能供给。若两路市电失压则工作电源也将出现失压,为此系统中配套了在线式UPS实现供电连续性。
(4)PLC的控制权限
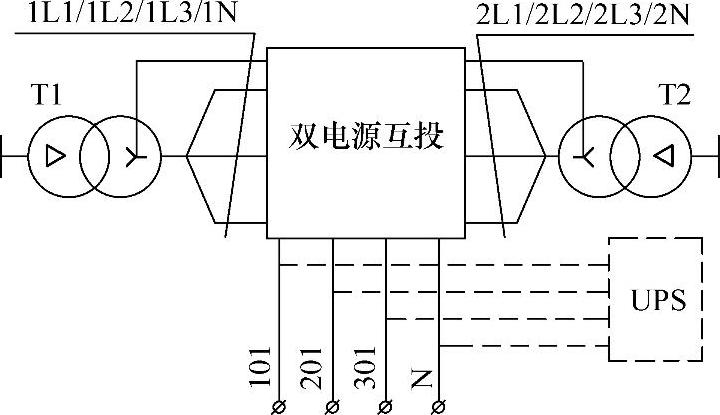
图6-54 范例系统的辅助回路电源供给
通常现场的控制权限最高,就地控制的PLC次之,后台上位机系统的控制权限最低。因此,手动/自动/远控的选择开关放置在现场,由现场人员决定控制权限的操作层面。
4.PLC控制程序分析——范例系统的信息处理程序
输入开关量处理程序的用途是将范例系统中各个开关量转换为变量。
任何开关的触头在发生变位时,由于反弹作用,触头都会在闭合位置反复弹跳数次直至稳定,所以备自投的开关量输入处理程序中要用TON来消除抖动,如图6-55所示。
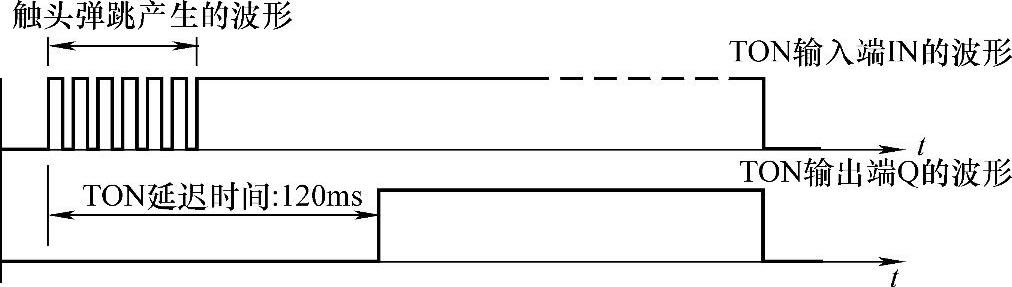
图6-55 用TON消除触头弹跳
范例系统的输入开关量处理程序如图6-56所示。
先看图6-56中Ⅰ段进线低电压信号采集程序段,其逻辑表达式如下:
INCOMING1LV={[KV11S.TON(0→1,t=120ms)]×[KV12S.TON(0→1,t=120ms)]×
[KV13S.TON(0→1,t=120ms)]}.TON(0→1,t=1s)
式中 KV11S、KV12S、KV13S——低电压继电器的三相动断触头变量;
INCOMING1LV——Ⅰ段母线失电压信号变量,值为1表示欠电压。
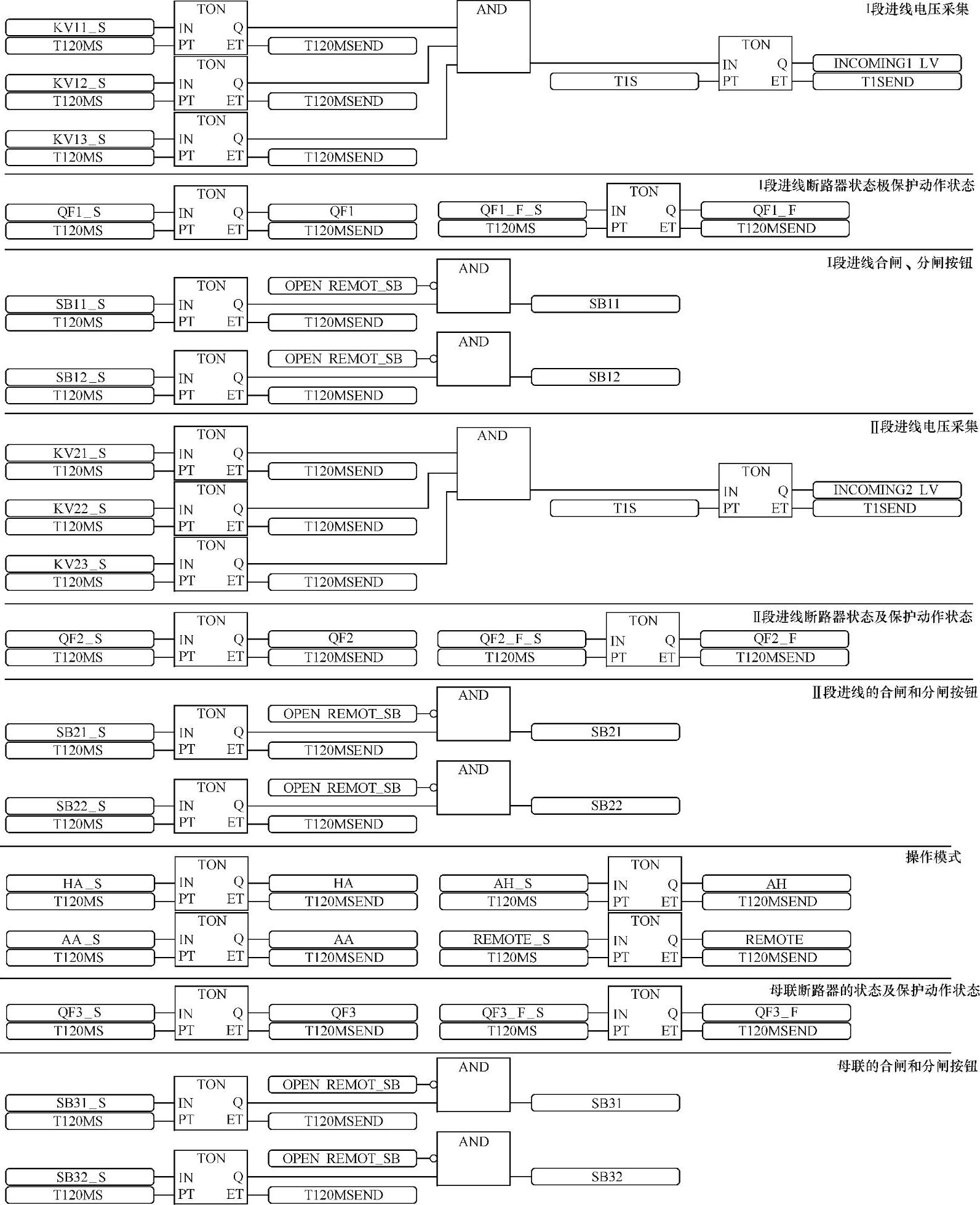
图6-56 范例系统的输入开关量处理程序
各相低电压继电器的线圈电压正常时其动断触头打开,只有当发生低电压并且延迟120ms后TON的输出才为1;当三相都出现低电压后,与逻辑AND的输出为1,经过右侧的TON图块延迟1s后,得到Ⅰ段母线失压信号变量INCOMING1LV=1。
注:若希望任意相在出现低电压后都能使INCOMING1LV=1,则只需将KV11S、KV12S、KV13S改变为动合触头即可。
类似地,Ⅱ段进线低电压信号对应的逻辑表达式如下:
INCOMING2LV={[KV21S.TON(0→1,t=120ms)]×[KV22S.TON(0→1,t=120ms)]
×[KV23S.TON(0→1,t=120ms)]}.TON(0→1,t=1s)
式中 KV21S、KV22S、KV23S——低电压继电器的三相动断触头变量;
INCOMING2LV——Ⅱ段母线失电压信号变量,值为1表示欠电压。
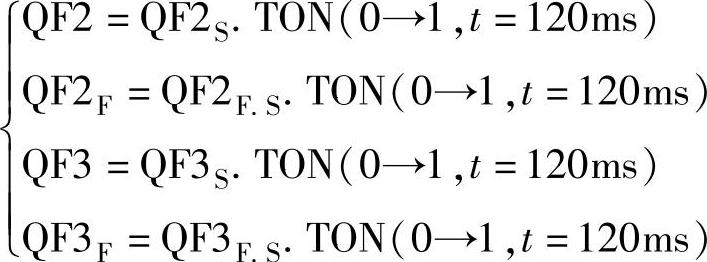
Ⅰ段进线断路器的状态及保护动作状态对应的逻辑关系如下:

Ⅰ段进线断路器的状态变量QF1系由其开关量QF1S经过延迟120ms防抖处理后得到的。Ⅰ短路断路器的保护动作状态变量QF1F也是采用相同的方法得到的。
类似地,Ⅱ段进线断路器和母联断路器的状态及保护动作状态对应的逻辑关系如下:
Ⅰ段进线断路器的合闸按钮状态变量SB11和分闸按钮状态变量SB12对应的逻辑关系如下:

这里的OPENREMOT.SB就是遥控变量,它是远方的电力监控系统通过现场总线对它直接置位获得的。平时常态下OPENREMOT.SB=0,故需要取反。
从控制的观点来看,OPENREMOT.SB相当于远方后台对各台断路器的合、分闸按钮进行使能闭锁,使得人工操作失效,体现出遥控操作的权限高于就地操作的权限。
Ⅱ段进线断路器及母联断路器的合、分闸按钮状态变量对应的逻辑关系如下:
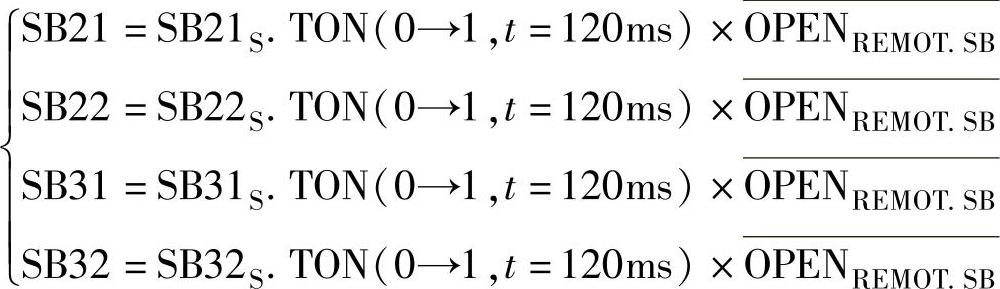
可见远方后台对各控制按钮的OPENREMOT.SB闭锁逻辑是一致的。
操作模式包括手投自复HA模式、自投手复AH模式和自投自复AA模式,但未包括手投手复HH模式。原因很简单,当HA、AH和AA均无效时,自然就是HH有效了。我们来看HA、AH和AA的逻辑表达式:
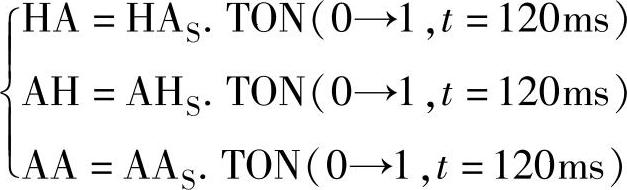
5.PLC控制程序分析——范例系统的操作模式处理程序
范例系统的备自投模式有三种,如下:
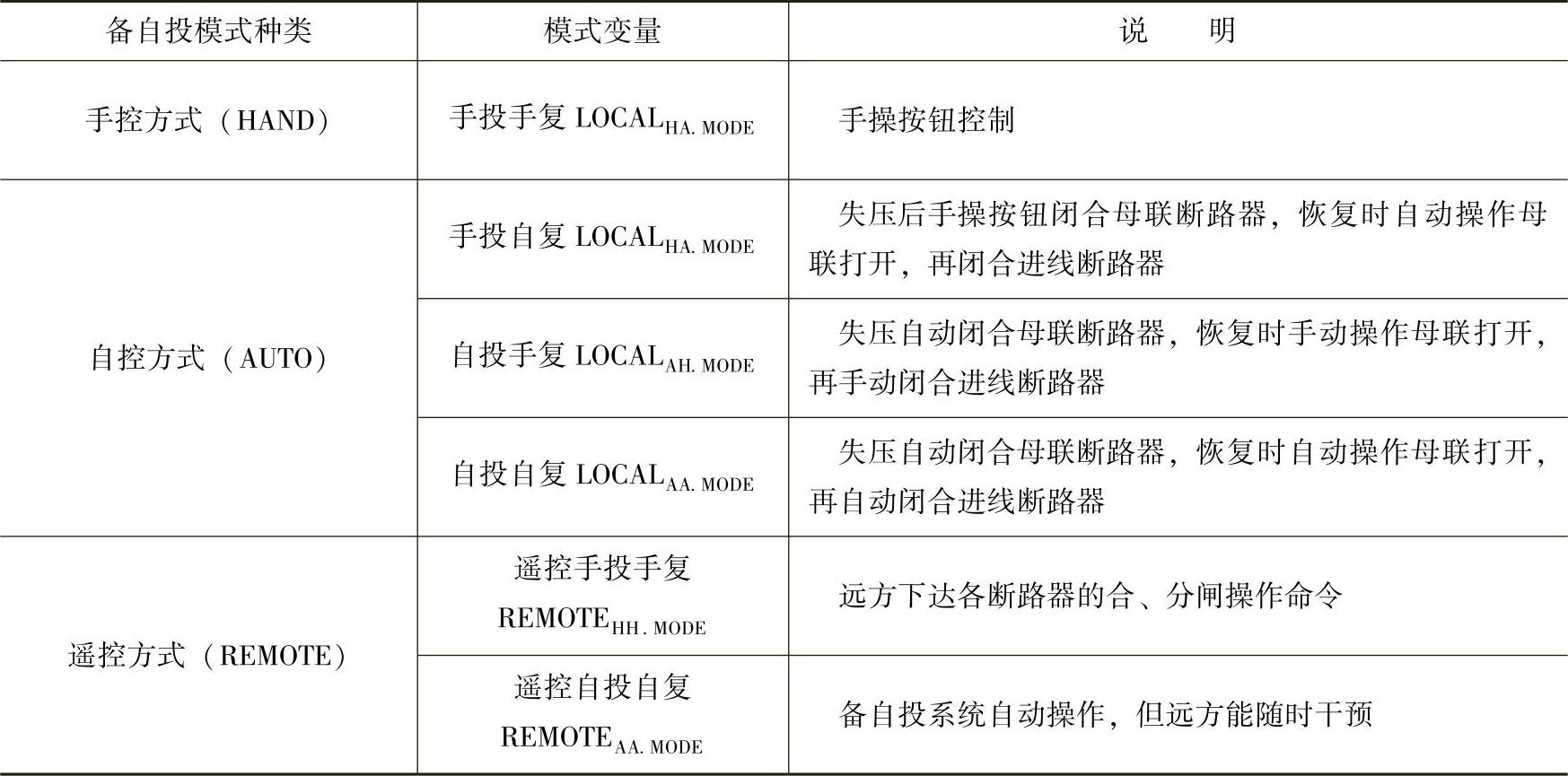
图6-57所示为范例系统的操作模式处理程序。
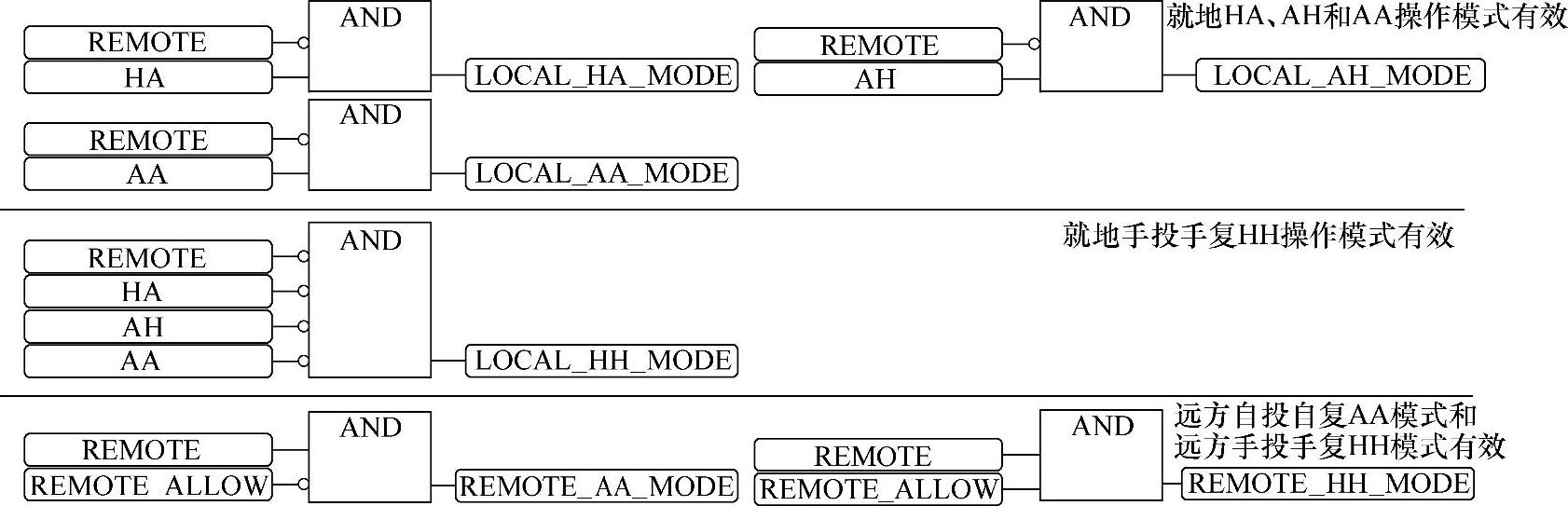
图6-57 范例系统的操作模式处理程序
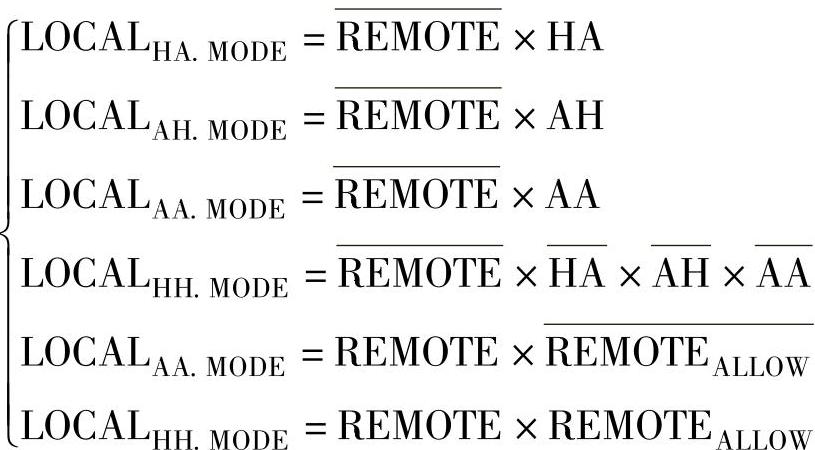
范例系统的操作模式逻辑表达式如下:
6.PLC控制程序分析——范例系统的电力系统状态分析程序(https://www.xing528.com)
由表6-31我们知道,范例系统三台断路器之间是通过电力系统状态建立互锁关系的。图6-58是对应的电力系统状态处理程序。
我们来看第一种状态变量STATU1的逻辑表达式:

显然,STATU1对应于所有断路器均处于打开的状态。我们合并看看8种状态的逻辑表达式:
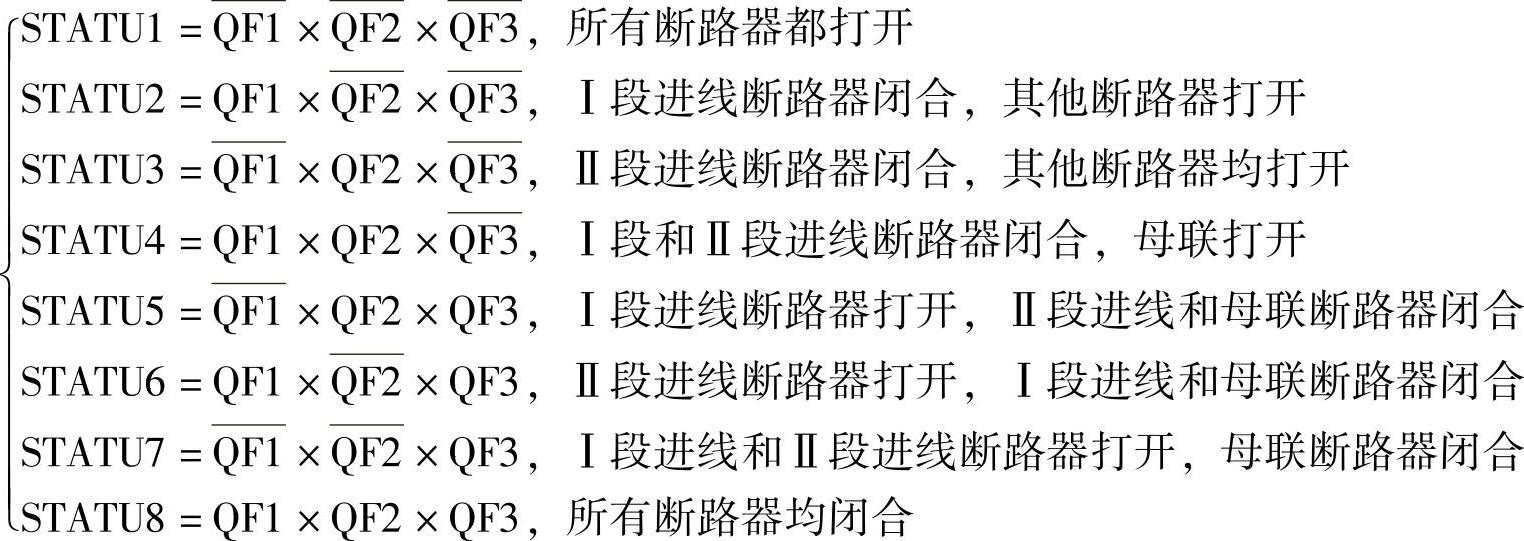
注意:STATU7和STATU8属于非法状态。
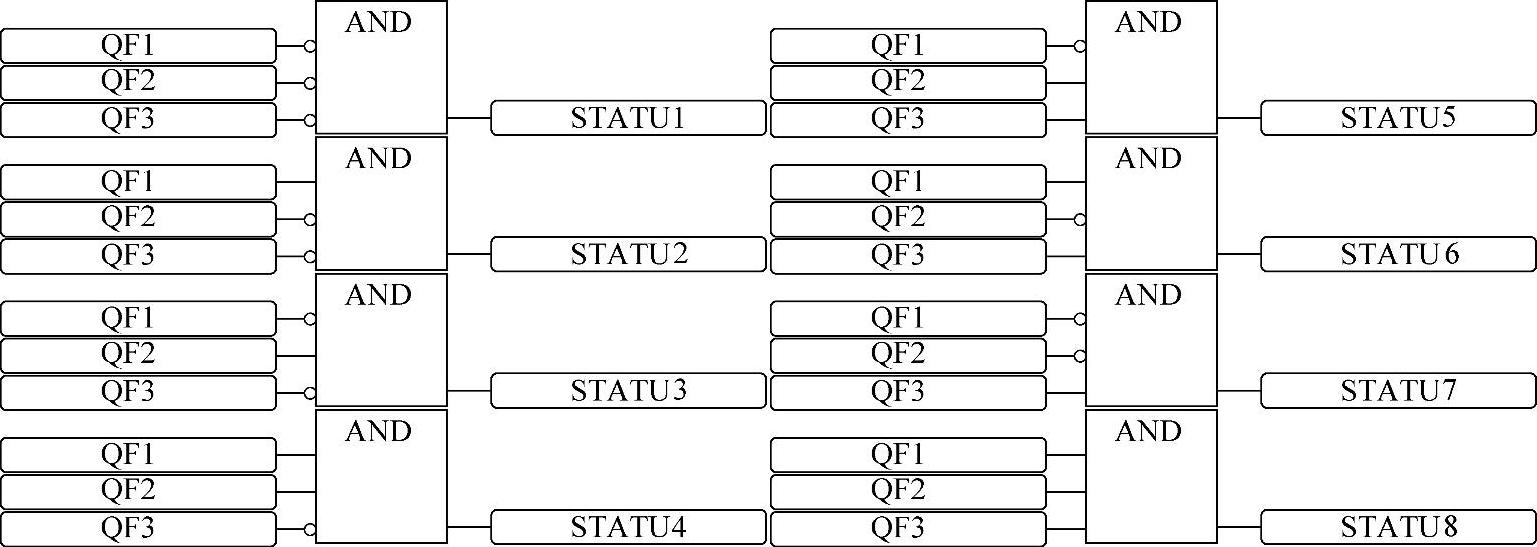
图6-58 电力系统状态分析程序
7.PLC控制程序分析——范例系统中就地手投手复操作进程和遥控操作进程
就地手投手复操作进程的程序见图6-59所示。
【程序入口】
图6-59的程序入口对应的逻辑表达式是
HHMODE=LOCALHH.MODE+REMOTEHH.MODE
式中 HHMODE——手投手复操作模式入口控制字,转移指令;
LOCALHH.MODE——就地手投手复操作模式控制字;
REMOTEHH.MODE——遥控手投手复操作模式控制字。
这里的HHMODE是PLC的转移指令。当HHMODE的条件满足时,就执行(HHMODE入口——程序段——HHMODE出口)中间的程序段。如果条件不满足,就跳出本段进程。
我们看到,只要就地手投手复操作模式控制字LOCALHH.MODE和遥控手投手复操作模式控制字REMOTEHH.MODE有效,并且未出现双路失电压,则备自投就进入就地手投手复操作进程中,反之则就跳出本进程。
【Ⅰ段进线断路器的合闸程序段】
图6-59中的Ⅰ段进线断路器QF1合闸程序段对应的逻辑表达式是:

式中 HHQF1YC——执行QF1合闸的出口继电器驱动变量。
我们看到,使得HHQF1YC有效的电力系统状态是STATU1、STATU3和STATU7。STATU1表示电力系统处于初始加电状态,尚未有任何断路器闭合;STATU3表示系统中仅仅Ⅱ段进线断路器QF2已经闭合,其他所有断路器均处于打开状态;STATU7表示只有母联闭合,进线均断开。
与此同时,QF1不能出现保护动作也即QF1F=0,Ⅰ段进线也不能出现失压也即INCOMING1LV=0;另外,QF1的合闸按钮已经按下SB11=1,或者遥控操作命令字REMOTEQF1YC=1。
当以上这些条件都满足后,QF1合闸出口继电器驱动变量HHQF1YC=1有效,HHQF1YC将驱使图6-52中的YCKA11中间继电器闭合从而让QF1断路器合闸。
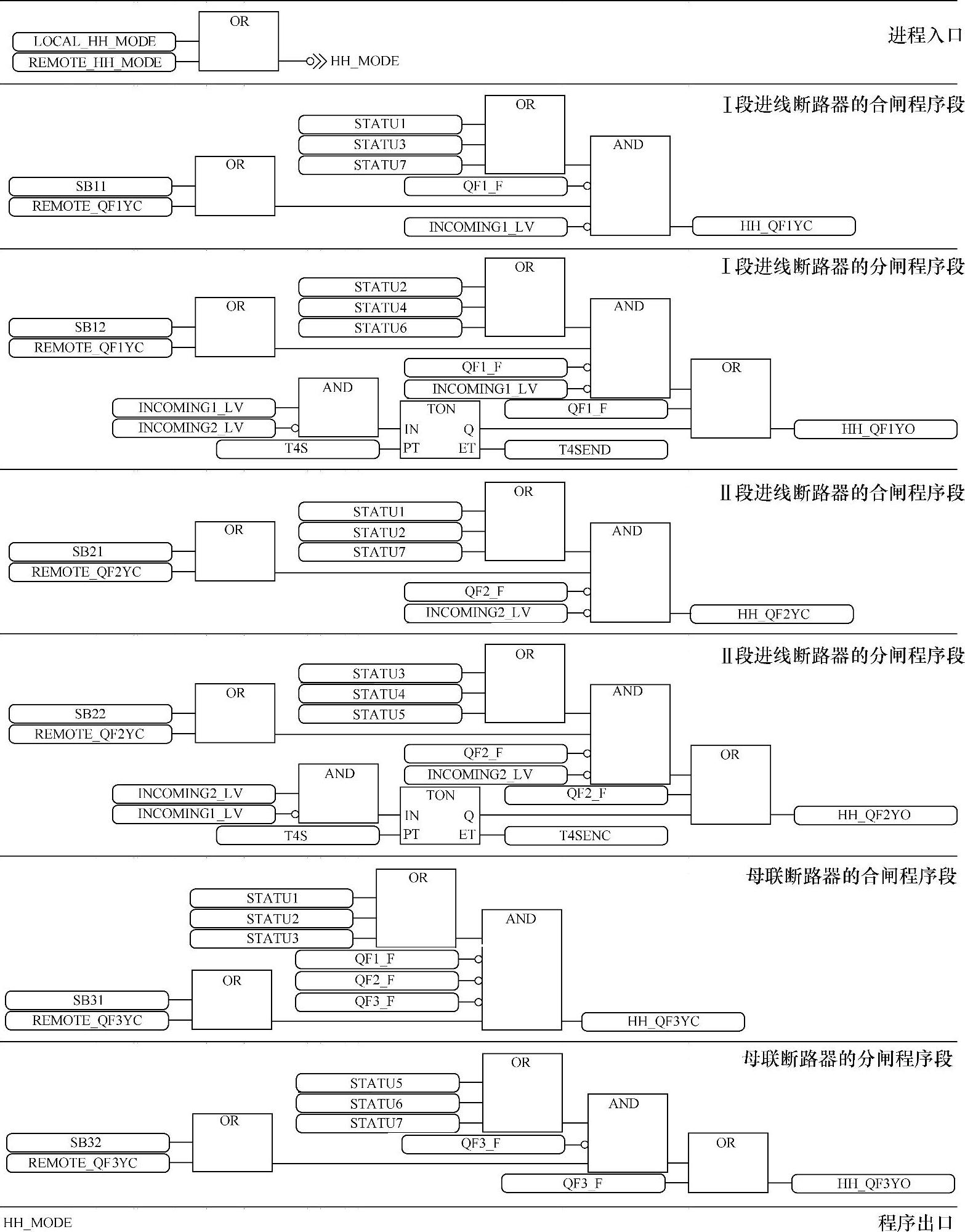
图6-59 范例系统备自投的手投手复操作进程和遥控操作进程
【Ⅰ段进线断路器的分闸程序段】
图6-59中的Ⅰ段进线断路器QF1分闸程序段对应的逻辑表达式是

式中 HHQF1YC——执行QF1分闸的出口继电器驱动变量。
我们看到要让HHQF1YO有效,必须让P1、P2和P3均有效也即P1=P2=PE=1。
先看P1中的电力系统状态:在STATU2、STATU4和STATU6下QF1均处于闭合状态;再看P1的操作项内容:其分闸按钮必须被按下SB12=1,或者遥控操作命令字REMOTEQF1YC=1有效;我们还看到QF1的保护未动作,而且Ⅰ段进线未出现失压现象。当这些条件都满足时,P1=1有效。
P2有效的条件是QF1未出现保护动作。
P3有效的条件是Ⅰ段母线出现失电压,同时Ⅱ段母线电压正常,并且还需要延迟4s判误。
当以上这些条件都满足后,QF1分闸出口继电器驱动变量HHQF1YO=1有效,HHQF1YO将驱使图6-52中的YOKA11中间继电器闭合从而让QF1断路器分闸。
注意P3=1的条件,说明尽管QF1处于手投手复的工作模式下,但若系统中出现失压,则手投手复程序会自动延迟4秒后让断路器QF1执行跳闸。延迟时间在1s到4s间连续可调。
【Ⅱ段进线断路器QF2的合闸程序与分闸程序分析】
Ⅱ段进线断路器QF2的合分闸条件与QF1类似,故程序分析从略。
【母联断路器QF3的合闸和分闸条件及操作程序】
母联断路器QF3的合分闸条件与QF1类似,故程序分析从略。
8.PLC控制程序分析——范例系统中就地自投自复操作进程
就地自投自复操作进程的程序见图6-60所示。
【程序入口】
图6-60所示的程序入口对应的逻辑表达式是:
AAMODE=LOCALAA.MODE+REMOTEAA.MODE
式中 AAMODE——自投自复操作模式入口控制字,转移指令;
LOCALAA.MODE——就地自投自复操作模式控制字;
REMOTEAA.MODE——遥控自投自复操作模式控制字。
这里的AAMODE是PLC的转移指令。当AAMODE的条件满足时,就执行(AAMODE入口——程序段——AAMODE出口)中间的程序段。如果条件不满足,就跳出本段进程。
我们看到,只要就地自投自复操作模式控制字LOCALAA.MODE和遥控自投自复操作模式控制字REMOTEAA.MODE有效,并且未出现双路失压,则备自投就进入就地自投自复操作进程中,反之则就跳出本进程。
【Ⅰ段进线断路器QF1的合闸程序段】
图6-60的Ⅰ段进线断路器QF1合闸程序段对应的逻辑表达式是
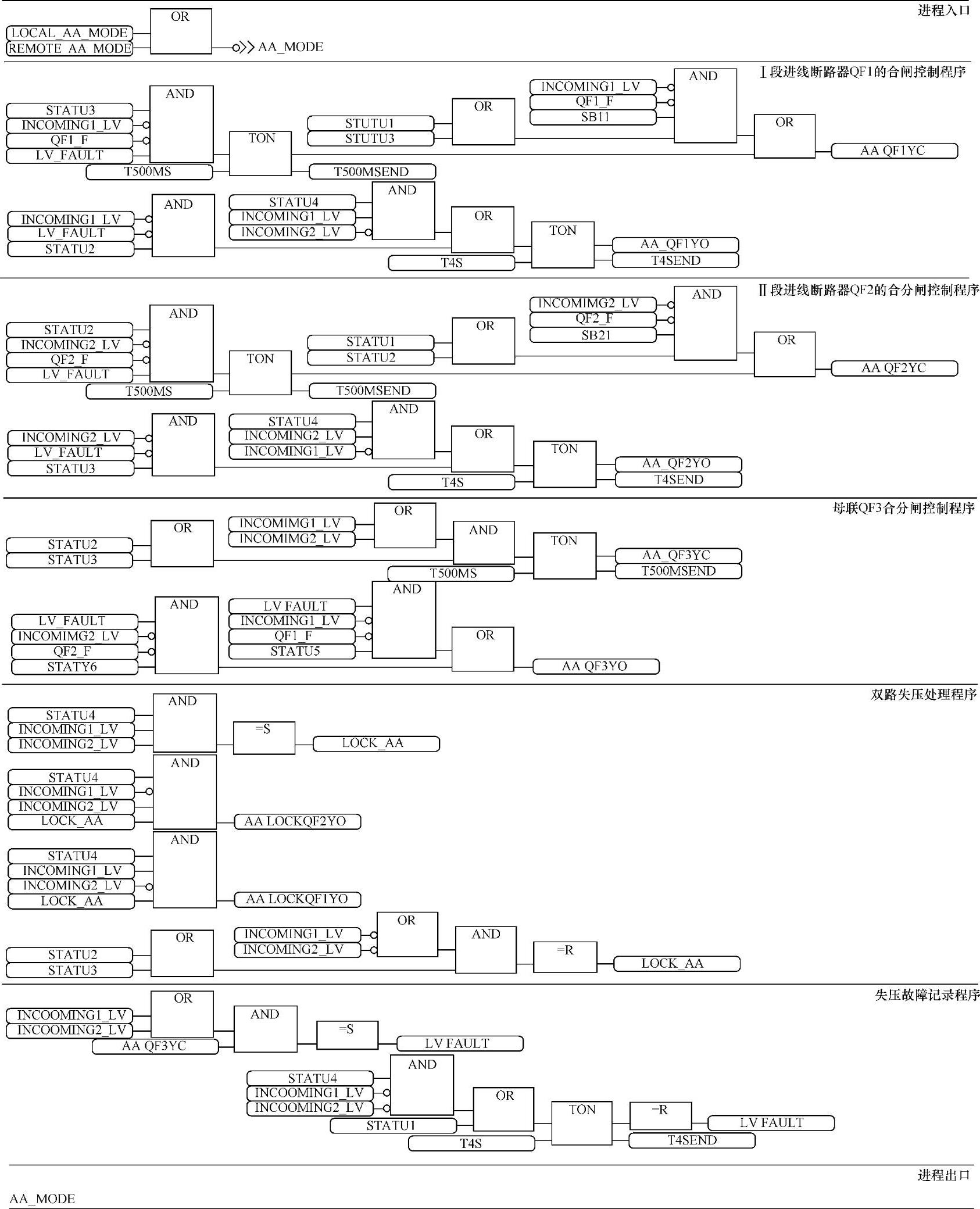
图6-60 范例系统备自投的自投自复操作进程和遥控操作进程

式中 AAQF1YC——执行QF1合闸的出口继电器驱动变量。
我们看到,使得AAQF1YC有效只需P1=1或者P2=1即可。
我们先来看P1:
P1中的电力系统状态是STATU1和STATU3。STATU1表示电力系统处于初始加电状态,尚未有任何断路器闭合,而STATU3表示系统中仅仅Ⅱ段进线断路器QF2闭合,其他所有断路器均处于打开状态。于是只要QF1未执行保护动作QF1F=0,同时Ⅰ段进线未出现失压也即INCOMING1LV=0、若QF1的合闸按钮已经按下SB11=1,则P1=1。
可见,P1的用途有两个,其一是系统首次上电时的手动操作断路器QF1合闸,其二是QF2先行闭合后再通过手动操作使得断路器QF1合闸。P1体现了备自投在首次上电时的手动操作过程。
再看P2:
P2中逻辑与的条件有四个:STATU3=1、INCOMING1LV=0、QF1F=0和LVFAULT=1,当这些条件都满足后TON被启动,延迟500ms后使得P2=1。
P2的用途是将因为失压故障而打开的Ⅰ段进线断路器QF1在故障恢复后重新闭合。其中状态条件STATU3有效是因为执行Ⅰ段母线供电接续的母联QF3已经断开,而失压故障记录LVFAULT有效表示当前的操作程序P2正在执行失压后的恢复操作。
当P1=1或者P2=1后,QF1的合闸出口继电器驱动变量AAQF1YC=1,AAQF1YC有效将驱使图6-52中的YCKA11中间继电器得电闭合继而让QF1断路器执行合闸操作。
在整个备自投程序中最重要的参数就是失压故障记录LVFAULT,失压故障记录LVFAULT是否有效是区分低压配电系统处于正常工作状态还是失压备自投状态的标志。
【Ⅰ段进线断路器QF1的分闸程序段】
我们来看QF1的对应的分闸逻辑表达式:
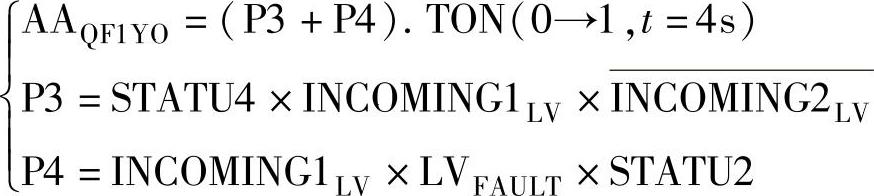
式中 AAQF1YO——执行QF1分闸的出口继电器驱动变量。
我们看到,要使得AAQF1YO有效,只要P3=1或者P4=1即可。
我们来看P3:
P3表征低压配电系统处于正常运行STATU4状态下,QF1和QF2均闭合而母联QF3打开。当Ⅰ段进线出现了低电压INCOMING1LV=1而Ⅱ段电压正常INCOMNG2LV=0时,P3=1有效。
我们再来看P4:
P4表征的是低压配电系统处于仅QF1闭合的STATU2状态下,失压故障记录LVFAULT=1有效,这时Ⅰ段进线又出现了低电压INCOMING1LV=1,于是P4=1有效。
P4有效对应的前期过程是:正常运行的低压配电系统Ⅱ段出现低电压,Ⅱ段进线QF2被备自投执行打开操作。QF2打开后失压故障记录LVFAULT=1有效,此时低压配电系统处于STATU2状态下。
当P3=1或者P4=1后,QF1的分闸出口继电器驱动变量AAQF1YO=1,AAQF1YO有效将驱使图6-52中的YCKA12中间继电器得电闭合继而让QF1断路器执行分闸操作。
TON的延迟时间从1s到4s可调,这里选用4s。QF1的分闸时间选择长一些较好,可以缓冲躲避短时电压凹陷带来的冲击。
【Ⅱ段进线断路器QF2的合闸程序段和分闸程序段】
图6-60的Ⅱ段进线断路器QF2合闸程序段对应的逻辑表达式与QF1的合闸逻辑类似:

式中 AAQF2YC——执行QF2合闸的出口继电器驱动变量。
图6-60的Ⅱ段进线断路器QF2分闸程序段对应的逻辑表达式与QF1的分闸逻辑类似:
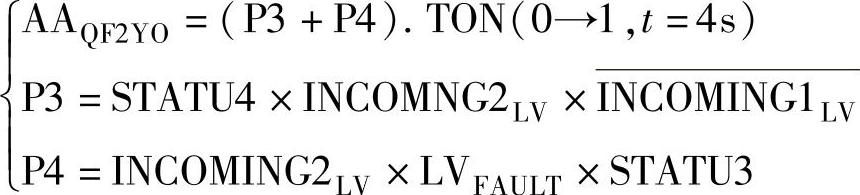
式中 AAQF2 YO——执行QF2分闸的出口继电器驱动变量。
QF2的合闸过程及分闸过程的表述因为与QF1雷同故从略。
【母联断路器QF3的合闸程序段和分闸程序段】
图6-60中的母联断路器QF3合闸程序段逻辑表达式如下:
AAQF3YC=[(INCOMING1LV+INCOMING2LV)×(STATU2+STATU3)].TON(0→1,t=500ms)
式中 AAQF3YC——执行QF3合闸的出口继电器驱动变量。
AAQF3YC有效的条件相对简单:Ⅰ段进线或者Ⅱ段进线出现失电压,低压配电系统处于单路供电状态STATU2或者STATU3。经过500ms的延迟后,AAQF3YC=1。
当AAQF3YC=1后将驱使图6-52中的YCKA31中间继电器得电闭合继而让母联QF3断路器执行合闸操作。
图6-60中的母联断路器QF3分闸程序段逻辑表达式如下:
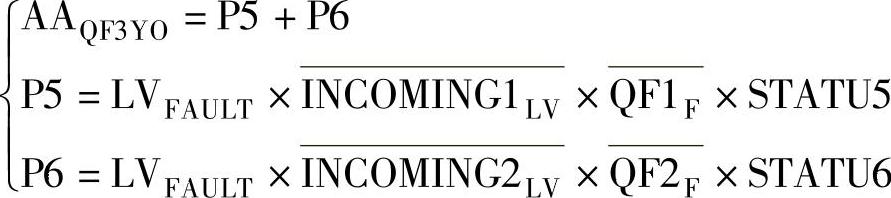
式中 AAQF3YO——执行QF3分闸的出口继电器驱动变量。
AAQF3YO有效的条件是P5=1或者P6=1。
我们来看P5:
从LVFAULT=1我们知道母联分断操作一定在失压故障处理的过程中出现;INCOM- ING1LV=0表示Ⅰ段进线的电压已经恢复;QF1F=0表示QF1未实施短路和过载保护动作;STATU5表示当前QF2和QF3闭合而QF1处于打开状态,也即当前系统处于Ⅱ段母线带Ⅰ段母线的工作状态。
再看P6:
从LVFAULT=1的意义同P5;INCOMING2LV=0表示Ⅱ段进线的电压已经恢复;QF2F=0表示QF2未实施短路和过载保护动作;STATU6表示当前QF1和QF3闭合而QF2处于打开状态,也即当前系统处于Ⅰ段母线带Ⅱ段母线的工作状态。
当AAQF3Y O=1后将驱使图6-51中的YCKA32中间继电器得电闭合继而让母联QF3断路器执行分闸操作。
【双路失电压处理程序段】
图6-60的双路失压处理程序段中出现了表6-29的锁存“|=S|”图块和解锁“|=R|”图块。在这里的用途是对LOCKAA状态字实施锁存和解锁:

当低压配电系统运行在STATU4状态下时,若突然发生Ⅰ段进线和Ⅱ段进线双路同时失电压,则LOCKAA状态字会被置位并锁存;当低压配电系统中任意一路进线的电压已经恢复且对应的某段进线断路器已经闭合,则LOCKAA状态字被复位并解锁。
当正常工作状态STATU4下的低压配电系统突然出现双路失电压时,由于辅助回路电源也随之失去,所以断路器QF1和QF2仍然保持在闭合位置,当电源恢复后可能对维护人员存在安全隐患。为此,当某段电源恢复后,必须立即打开电压尚未恢复的另段进线断路器。
在备自投程序中对应的逻辑表达式如下:

式中 AALOCKQF1YO——执行双路失压QF1分闸的出口继电器驱动变量;
AALOCKQF2YO——执行双路失压QF2分闸的出口继电器驱动变量。
【失压故障记录LVFAULT的置位和复位处理程序段】
失压故障记录LVFAULT的置位及复位也是用锁存“|=S|”图块和解锁“|=R|”来实现的。我们来看对应的逻辑表达式:

从上式中我们看到,当任意段进线出现失压并且母联投入后,LVFAULT=1并且被置位闭锁;当低压配电系统的状态为STATU4并且两段进线的电压都正常,或者低压配电系统的状态为STATU1,LVFAULT在延迟4s后被复位解锁。
失电压故障记录LVFAULT从低压配电系统出现失电压时被置位闭锁,一直延续到低压配电系统恢复到正常运行状态STATU4时才被复位解锁,这样就能区分出系统在首次送电前电压为零的状态与低压配电系统运行时的失电压状态,还能区分出手动上电投入进线断路器与备自投控制下投入进线断路器等两种不同的进程。
9.PLC控制程序分析——范例系统中的出口继电器驱动程序
范例系统中的PLC出口继电器驱动程序见图6-61。
出口继电器驱动程序是PLC所必需的。因为PLC程序中禁止对出口继电器重复操作,故当程序中出现多路变量驱动出口继电器时,必须经由OR模块处理才能实现输出控制功能。
以下仅以Ⅰ段进线断路器QF1的合分闸出口继电器驱动程序为例给予说明。
QF1的合闸出口继电器驱动程序逻辑表达式如下:

式中 QF1YC——QF1的合闸继电器,即PLC内部RL1继电器常开触点,RL1的控制对象
是图6-52的YCKA11中间继电器。
表达式括号内的就是各段程序的出口继电器驱动变量:
HAQF1YC——手投自复出口继电器驱动变量;
AHQF1YC——自投手复出口继电器驱动变量;
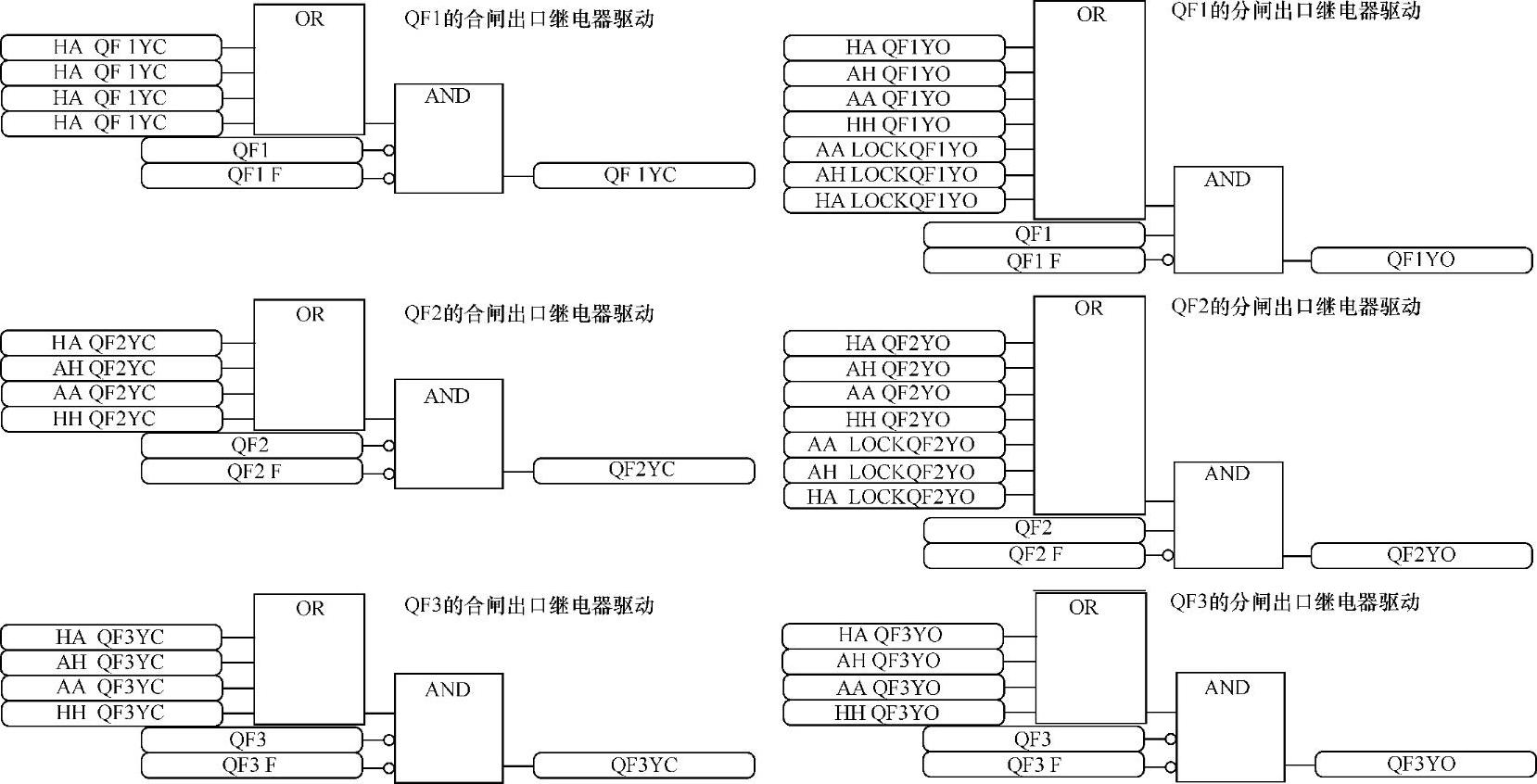
图6-61 范例系统备自投的PLC出口继电器驱动程序
HHQF1YC和AAQF1YC——已经讨论过的手投手复出口继电器驱动变量和自投自复出口继电器驱动变量。
由于操作模式的唯一性知道,以上这些出口继电器驱动变量的有效性也是唯一的。当某出口继电器驱动变量有效时,若QF1=0断路器处于打开状态,并且QF1未进行短路保护和过载保护即QF1F=0,则QF1YC=1。
Ⅰ段进线断路器动作后其状态QF1=1,由逻辑表达式可知,必有QF1YC=0,也即QF1的合闸继电器返回。
QF1的分闸出口继电器驱动程序逻辑表达式如下:

QF1的分闸出口继电器逻辑表达式中的AALOCKQF1YO就是就地自投自复程序中双路失压时的出口继电器驱动变量。另外,注意到本段程序中Ⅰ段进线断路器的状态,值为QF1=1,也即断路器处于闭合状态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。