



电动炉门升降机构有两种传动方式:一是炉门质量完全被平衡锤平衡,炉门升降均利用传动装置提供动力;二是炉门质量被平衡锤部分地平衡,炉门提升时依靠传动装置提供动力;炉门靠自身质量下降,并由电动机产生的反制动力矩保持炉门下降速度不变。
采用平衡锤平衡炉门质量可减少提升力及电动机功率,还有利于炉门平稳升降。平衡锤质量与炉门质量之比称平衡率,平衡率的选定既应能保证炉门自如下降,又能将提升力减小到最低限度。炉门被部分平衡时,一般取平衡率等于0.7~0.8。
1.炉门升降受力分析
如图11-77所示。以环形链绕过链轮吊挂炉门为例,试分析升降炉门所需拉力F。
提升炉时的上升力为
F1=Gg(cosθ+μ′sinθ)
取θ=3°,炉门与导板间摩擦因数μ′=0.3,则
F1=Gg(cos3°+0.3×sin3°)=1.01Gg
提升炉门所需拉力[单个链(滑)轮]
F≥μF1≥1.01μGg (11-103)
式中 μ——综合阻力系数, ,η为链(滑)轮
,η为链(滑)轮
的机械效率。
关闭炉门时的下降力为
F2=Gg(cosθ-μ′sinθ)=0.99Gg
为保证炉门自由下降,应使F2≥μF,即下降炉门时所需拉力

同理可得图11-92所示多个链(滑)轮升降炉门所需拉力F(N)为
提升时F≥1.01μ1μ2…μnGg (11-105)

式中μ1、μ2、…、μn——各个链(滑)轮的综合阻力系数。

图11-77 炉门升降受力分析图
F″=μGgsinθ(摩擦阻力)
F′=Ggcosθ(炉门垂直分力)
F‴=Gg(炉门重力)
N=Ggsinθ(炉门分力)
2.平衡率的确定
设平衡锤质量为G1,炉门质量为G,则平衡率m=G1/G,由此得
或
将式(11-107)代入式(11-105)及式(11-106)得
F1=(1.01μ1μ2…μn-m)Gg (11-108)

当炉门全平衡时,m=1;部分平衡时,m<1。为使炉门能自由下降,F2应为0,由式(11-109)可得

式(11-110)为确定平衡率的依据式,考虑到计算及制造误差,设计中常取m=0.7~0.8。
圆环链阻力系数按下式计算

式中  ;
; ;
;
D0——链轮节圆直径(mm);
d——链环圆钢直径(mm);
dz——轴颈直径(mm);
f1——链环圆钢间滑动摩擦因数;
f2——轴承摩擦因数:滑动轴承f2=0.1~0.15;滚动轴承f2=0.02。
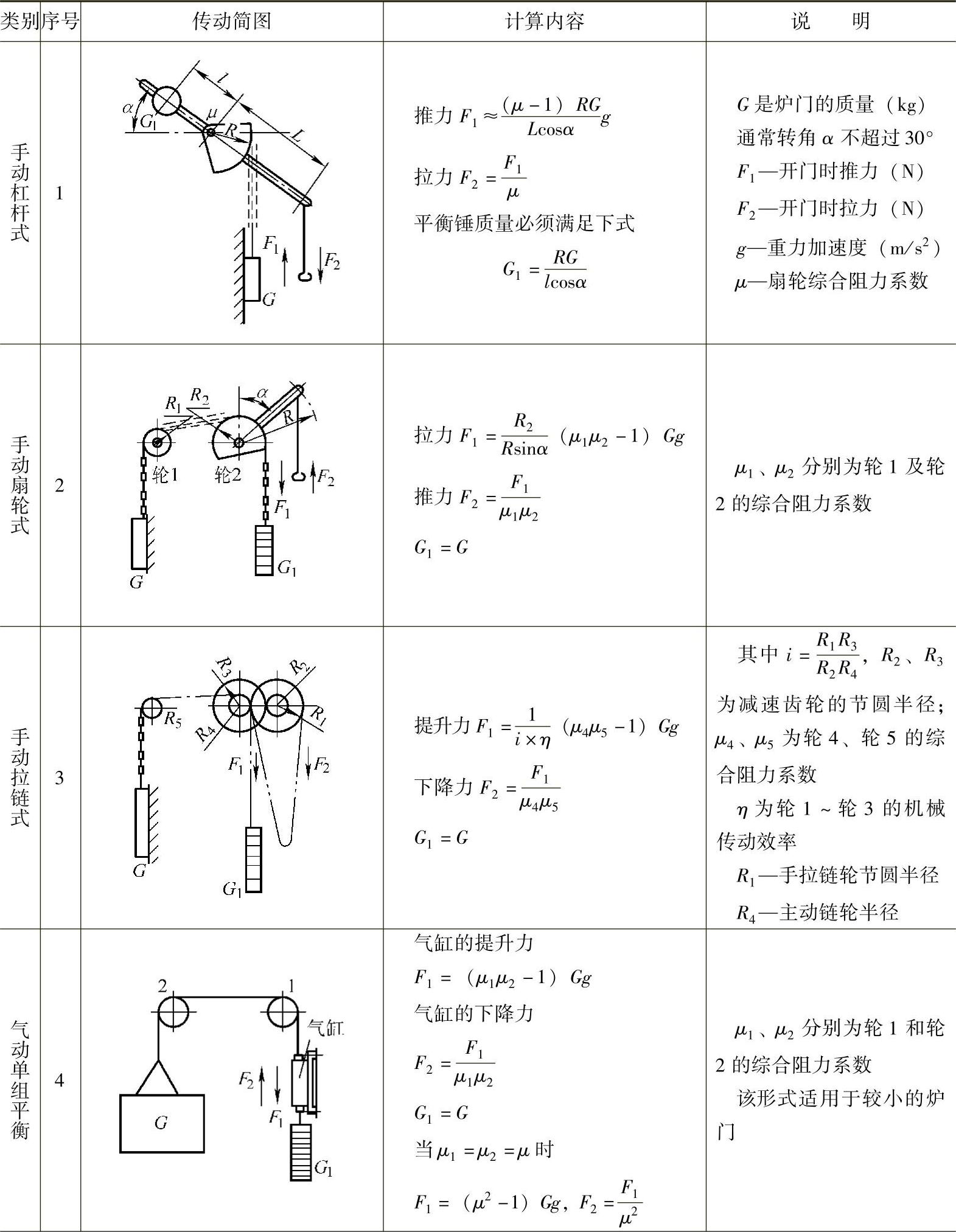
常用炉门升降机构布置方案及升降力计算公式见表11-34。
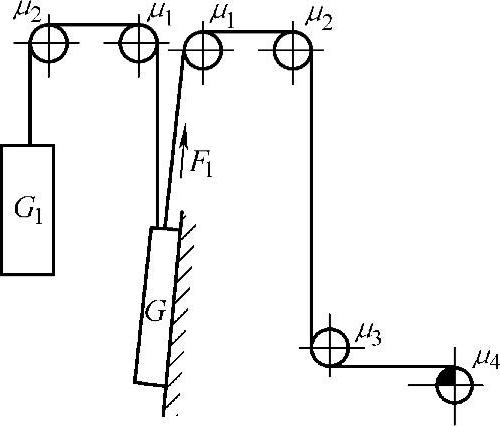
图11-78 多个链(滑)轮炉门升降情况
3.炉门升降力计算举例
例4 如图11-78所示,炉门质量G=500kg,平衡锤质量G1=400kg,链条圆钢直径d=9mm,链轮节圆直径D0=200mm,链轮轴颈直径dz=45mm,求提升炉门时上升力F1并验算炉门能否靠自身质量下降。
解:炉门重力Gg=500×9.8N=4900N
平衡锤重力G1g=400×9.8N=3920N
平衡率 ,
, ,K2
,K2 ,取f1=0.3,f2=0.15,则
,取f1=0.3,f2=0.15,则
由式(11-108)得
F1=(1.01μ1μ2-m)Gg=(1.01×1.1×1.1-0.8)×500×9.8N=2068N
验算炉门能否自由下降,由式(11-110)得

实际所选平衡率m=0.8<0.818,故炉门可依靠自重下降。
表11-34 常用炉门升降机构设计计算表
(续)
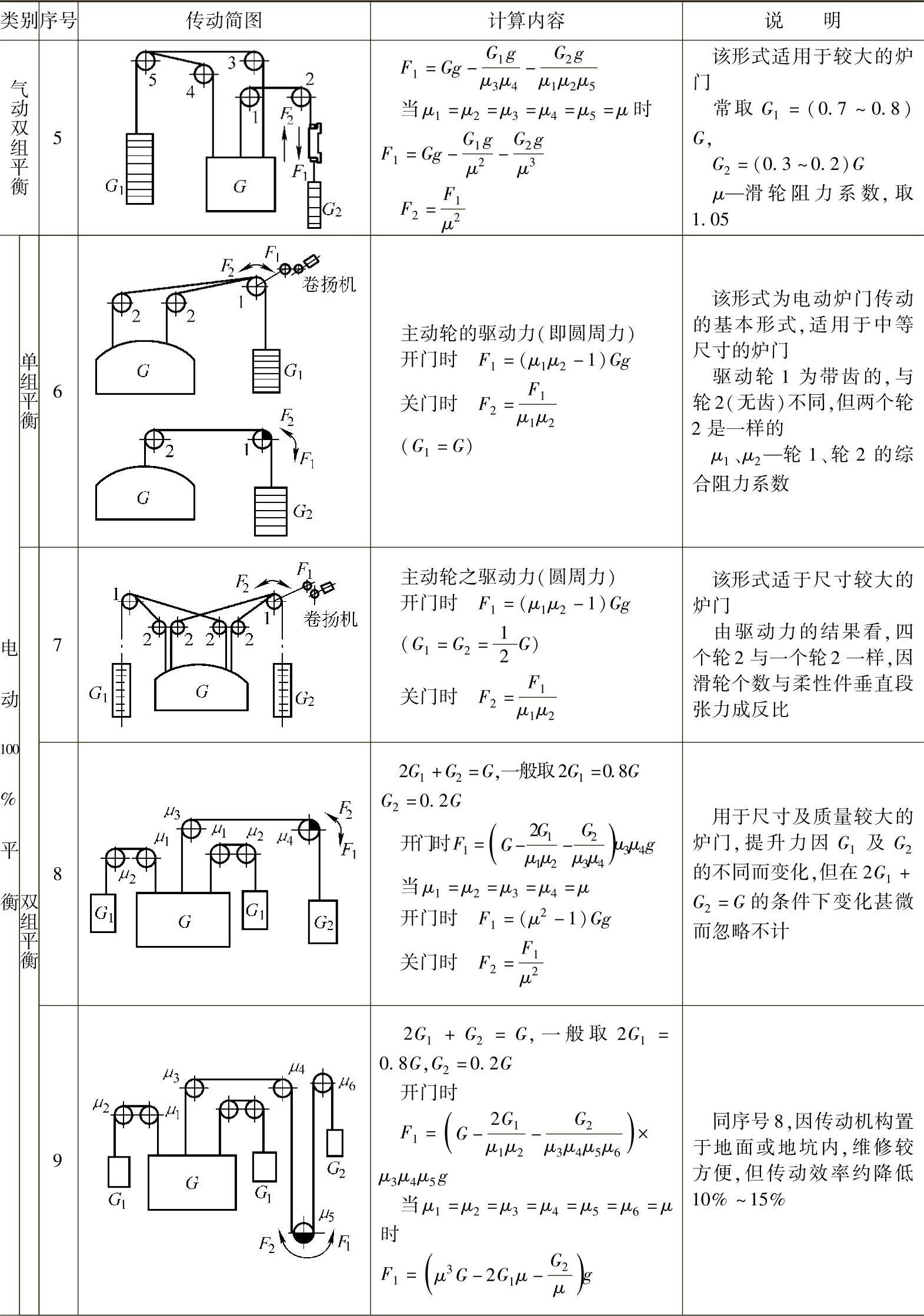
(续)

(续)
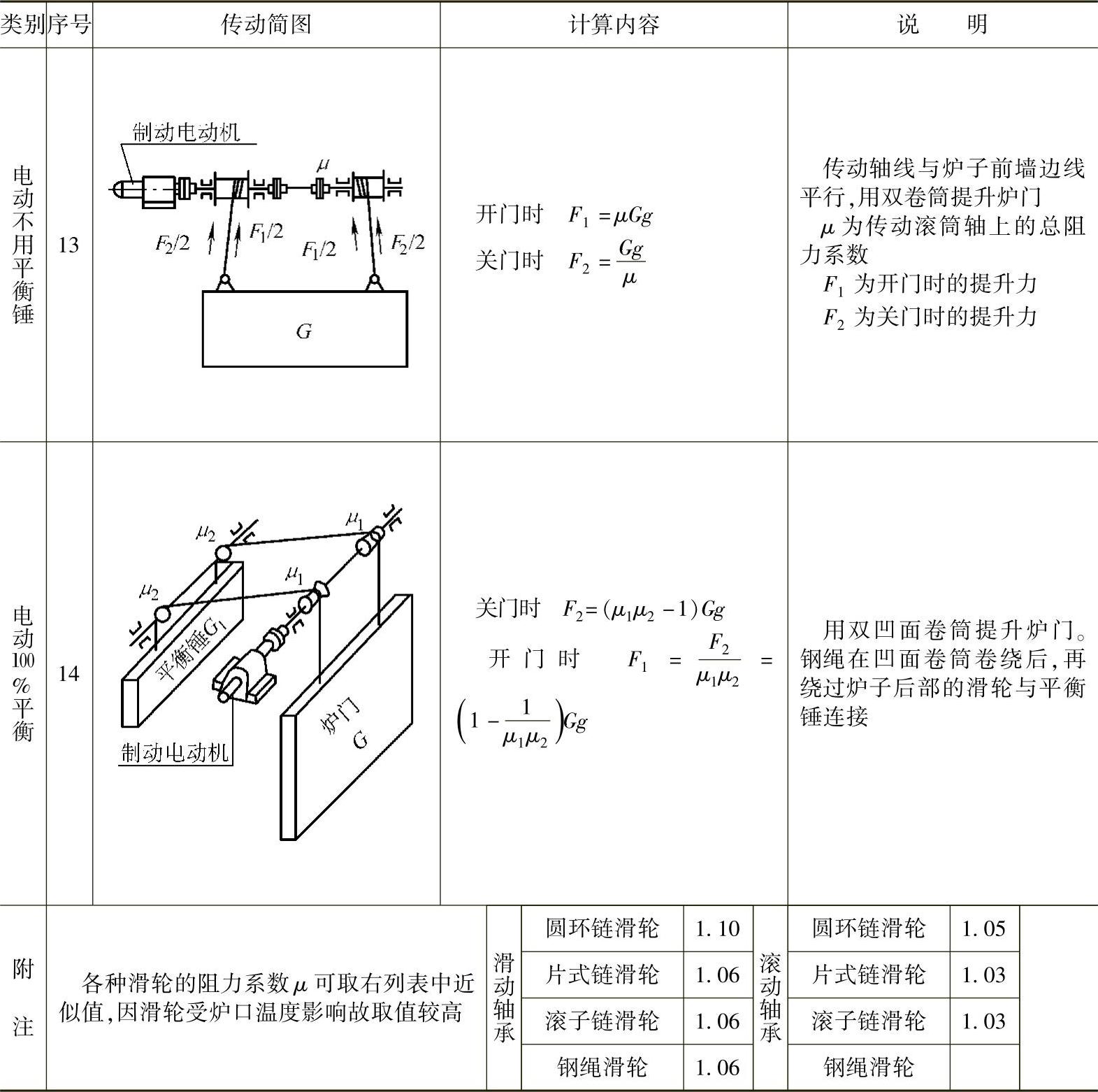
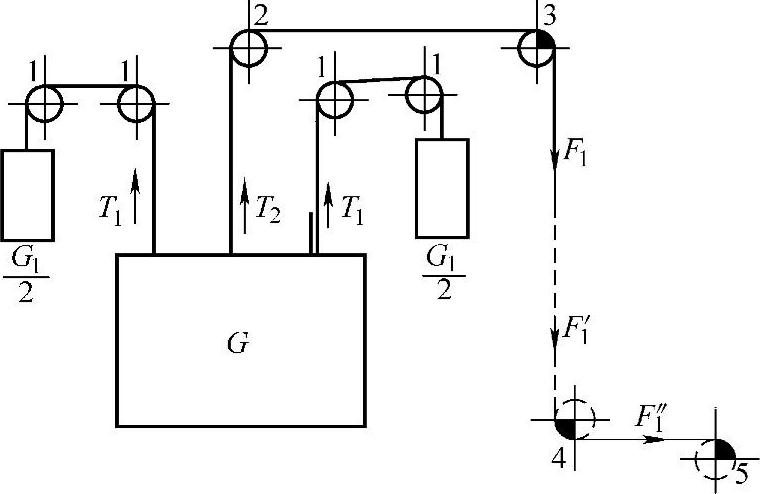
图11-79 双侧平衡炉门升降机构受力情况
例5 试推导图11-79所示双侧平衡炉门升降机构提升力的计算式。
解:根据图示受力情况列出下列方程式:
F1=μ1μ2T2(1) G1g=μ21T1(2)

T1、T2为提升炉门时柔性件的张力,将式(1)、式(2)中的T1、T2值代入式(3),得传动机构置于炉顶横梁端时的提升力为
传动机构置于炉前支柱侧面时的提升力为(https://www.xing528.com)

传动机构置于炉前一侧地坑内时的提升力为

图11-80 12kN带槽圆柱卷筒钢绳卷扬机(卷扬机速度8m/min,钢绳直径15.5mm,功率2.2kW)
4.炉门升降机构卷扬机的布置与设计
(1)钢绳卷扬机 钢绳卷扬机运行时平稳无声,维修简便,故应用最广。卷筒结构分为:带槽圆柱卷筒(图11-80)和凹面卷筒(图11-81)两种类型,前者主要用于炉门被部分平衡的情况,钢绳端部需固定在卷筒上;后者主要用于炉门被全部平衡的情况,钢绳先在卷筒上绕几圈后再在两端分别吊挂炉门及平衡锤,具有钢绳能自动居中、无偏斜、过载时打滑从而起到安全保护作用的优点。所用减速器主要有蜗杆减速器、直齿轮减速器和摆线针轮减速器,也有利于电动葫芦改装使用的。图11-81所示为凹面卷筒卷扬机,其卷筒右面的毂孔与减速器轴采用过渡配合,左面毂孔与短轴采用过盈配合,短轴另一端在轴承中旋转。此类卷扬机减少了设备总长度。
(2)环形起重链卷扬机 用于中小型炉门全平衡传动。主传动链轮带窝齿,环形起重链绕挂在主传动链轮上,在其两端吊挂炉门及平衡锤。电动机正、反转时,链轮即带动炉门升降,因链轮齿数少,故结构紧凑,但传动时有较大噪声。为使炉门停位准确,卷扬机应带有制动装置或采用制动电动机。图11-82为卷扬机安装图。

图11-81 摆线针轮凹面卷筒卷扬机
1—机架 2—轴承 3—短轴 4—凹面卷筒 5—摆线针轮减速器 6—制动轮 7—制动器 8—电动机
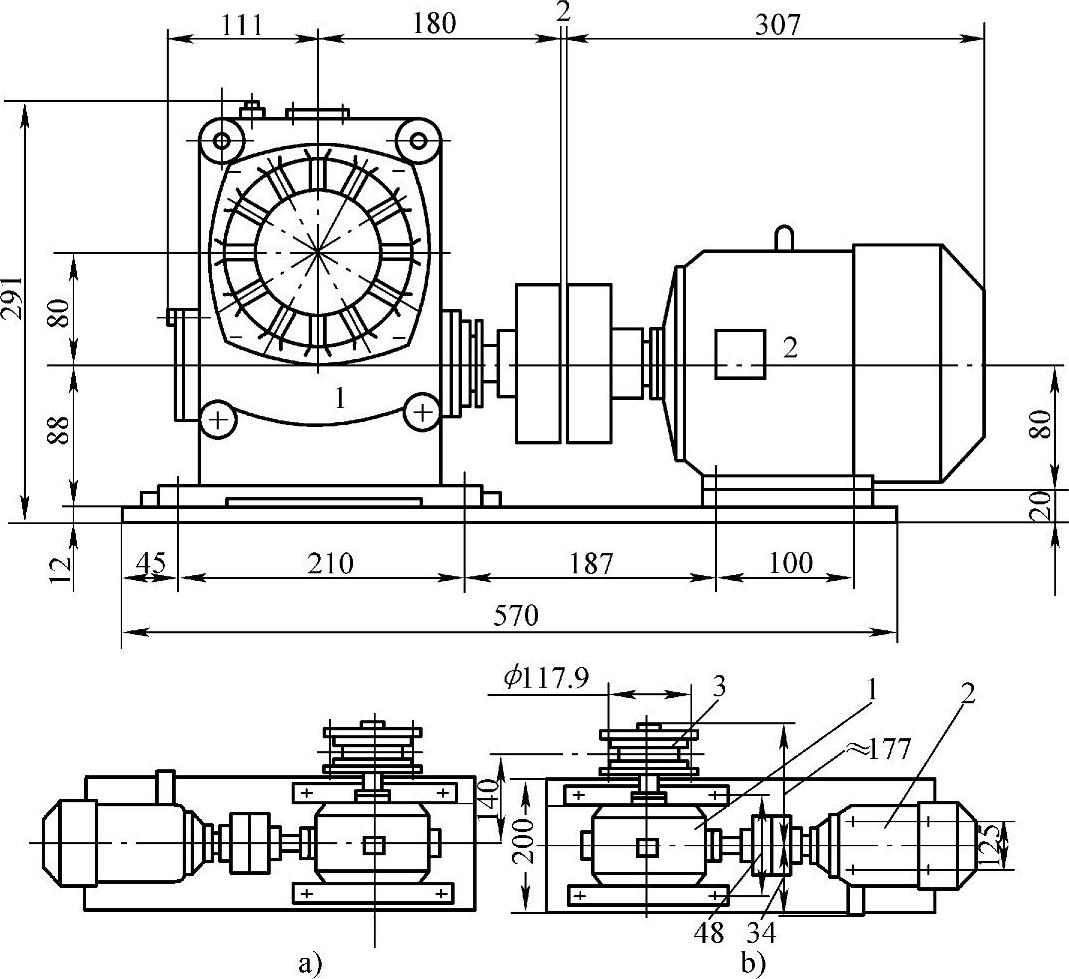
图11-820.6kN环形起重链卷扬机(卷扬机速度6.7m/min,炉门质量300kg,功率0.55kW)
a)左安装形式 b)右安装形式
1—减速器 2—电动机 3—起重链轮
(3)片式起重链卷扬机 安装形式如图11-83所示,用于炉门全平衡情况。用片式起重链或套筒滚子链的两端吊挂炉门及平衡锤,中间绕挂在主动链轮上,电动机正、反转时,链轮即带动炉门升降。链条的绕入支与绕出支应处在同一平面内以达到传动平稳和减少磨损。

图11-83 14kN片式起重链卷扬机
a)左安装形式 b)右安装形式
注:炉门质量≤8000kg,卷扬机速度6.9m/min,电动机功率2kW。
5.炉门升降机构动力计算
(1)电动机功率计算 根据炉门升降机构类型求出提升力后,按下式计算电动机功率

式中 P——电动机功率(kW);
F——炉门提升力(kN);
v——炉门升降速度(m/min);
K——功率备用系数,K=1.1~1.25;
η——传动机构的机械效率,η=η1η2η3…,各传动件效率η1、η2、η3…查表11-18。
根据炉门开启频繁程度,按负荷持续率FC25%或FC15%选用与功率计算值相近的电动机。
(2)电动机起动力矩验算 升降机构起动时,电动机除克服载荷(炉门与平衡锤重力之差)引起的静阻力矩Mj外,还需克服在起动时间tq内加速到稳定起升速度v所产生的动阻力矩Md,故起动时电动机需克服的总力矩Mq为
Mq=Mf+Md≤Mp (11-113)
式中 Mj——静阻力矩(N·m), ;(11-114)
;(11-114)
P、n——电动机的计算功率(kW)和转速(r/min);
Md——动阻力矩(N·mm),

GD2——电动机轴上转子和联轴器等机件的飞轮力矩(N·m2);
δ——电动机以外转动机件飞轮力矩的影响系数,δ=1.1~1.15;
η——传动机构的机械效率,查表11-18;
tq——起动时间,tq=1~1.55s;
F——炉门提升力(N);
Mp——电动机平均起动力矩(N·m);交流笼型电动机Mp=(0.7~0.8)
Md,max,Md,max为电动机最大力矩;交流绕线电动机Mp=(1.5~1.8)
Me,Me为电动机额定力矩。起动时间的验算

(3)制动器选择 为使炉门能在任何位置停留,升降机构必须设制动器或采用制动电动机传动,制动器按以下两种方法选择:
1)按静阻力矩乘以安全因数选择。升降机构所用制动器须满足以下计算式

式中 F——炉门提升力(N);
D——卷筒或链轮直径(m);
i——传动装置总速比;
η——传动装置的机械效率;
K——制动安全因数:轻型炉门取1.5;中型炉门取1.8;重型炉门取2;
Mzq——制动器的制动力矩(N·m)。
所选制动器应能使炉门在1~1.5s内停止运动,制动时间按下式计算

式中Mzq——制动器的制动力矩(N·m);
Mj——折合到制动轴上的净阻力矩(N·m), ;
;
D——卷筒直径(m);
F——有效卷扬力(N);
i——传动装置总速比;
[tz]——许用制动时间,[tz]=1~1.5s。
2)按实际需要的制动力矩选择
静制动力矩
动制动力矩
总制动力矩 Mz=Mjz+Mdz≤Mzq (11-121)
(4)联轴器选择 高速轴,即电动机轴多选用弹性柱销联轴器,慢速轴可选用十字滑块联轴器、齿轮联轴器或滚子链联轴器等。
根据计算转矩Tc按式(11-147)选择联轴器。

式中 P——驱动功率(kW);
n——联轴器转速(r/min);
Tn——联轴器的公称转矩(N·m);
K——工作情况因数,K=1.4~1.7。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。