



1.扇形链轮杠杆式机构
(1)机构I(图11-71)推拉力计算
1)平衡质量G2(kg)

式中 G1——炉门质量(kg)。
2)开门时阻力Q1(N)

式中 μ——摩擦因数,μ=0.3;
G3g、G4g——炉门重力G1g沿导板方向的水平分力及垂直于导板的分力(N)。
当θ=3°时,Q1=1.01G1g。
3)拉杆推力F2(N)
式中 K——裕度系数,取K=1.2~1.4。
4)关门时阻力Q2(N)

5)拉杆拉力F1(N)

为安全起见,实际的拉杆推拉力应采用以下安全数据,即推力F2≤150N,拉力F1≤200N。
(2)机构Ⅱ(图11-72)拉力计算
1)平衡锤质量G2(kg)

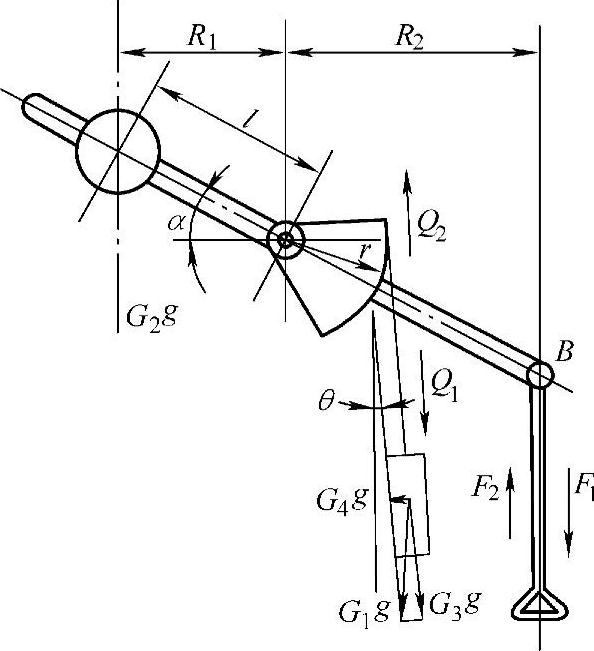
图11-71 单面链轮杠杆式机构Ⅰ
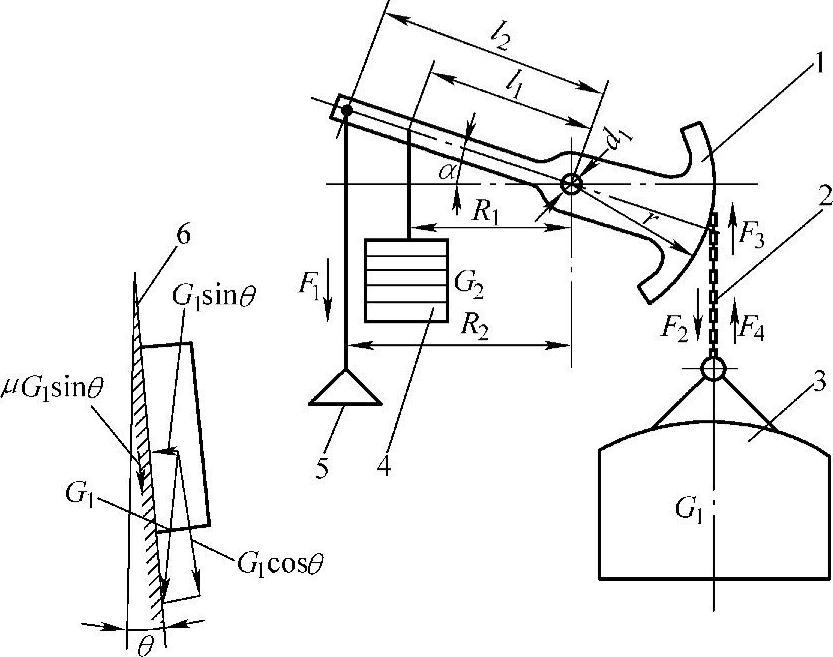
图11-72 单面链轮杠杆式机构Ⅱ
1—单面链轮 2—非标准链 3—炉门 4—平衡锤 5—拉杆 6—炉门导板
2)炉门上升时炉门施于链条向下的阻力F2(N)为

式中μ为炉门与导轨间的滑动摩擦因数,μ值取0.3,导板倾角θ值取2°~4°。
3)平衡锤施于链条处的有效提升力F3(N)为

式中η为扇轮机构的机械效率,取η=0.95。
4)炉门上升时需外加于链条处的向上拉力F4(N)为

5)炉门上升时加于手柄上的拉力F1(N)为
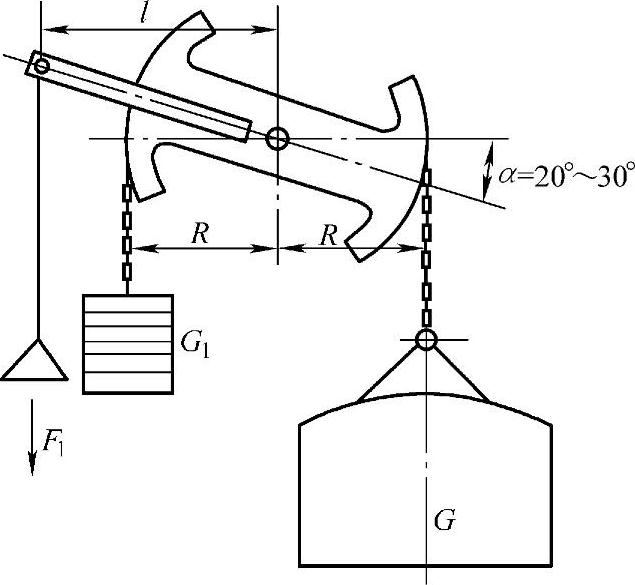
图11-73 双面扇形链轮杠杆式机构
允许拉力F1≤150~250N,炉门开闭次数不多时取上限。
(3)双面扇形链轮杠杆式机构(图11-73)拉力计算 计算方法与单面扇形链轮杠杆式机构类似。当炉门倾斜3°、平衡锤质量G1=炉门质量G,开启炉门时手把处拉力F1(N)为(https://www.xing528.com)

式中 μ——链轮阻力系数,μ≈1.05;
K——裕度系数,K=1.2~1.4。
(4)手动轮柄式机构(图11-74)推拉力计算
设炉门质量为G,平衡锤质量为G3=0.95G,链轮阻力系数μ=1.05,炉门与导板间摩擦因数μ′=0.3,炉口导板倾角θ=3°。轮柄倾角α=40°。
1)开炉门时拉力F1(N)
由平衡式 μ2R求解得
μ2R求解得

2)关炉门时推力F2(N)
由平衡式 求解得
求解得

式中K为裕度系数,取1.2~1.4,F1、F2应小于人臂推、拉力150~200N。
2.直接传动手动链轮升降机构
如图11-75所示。取平衡锤质量G1=炉门质量G,炉口导板垂直时的炉门提升力(N)为

炉门下降力(N)为

炉口导板带有斜度(θ=3°)时的炉门提升力为

式中η1、η2——吊挂炉门链轮及传动链轮的机械效率≈0.95;
D1、D2——吊挂炉门链轮及传动链轮直径(mm);
K——裕度系数,取K=1.2~1.4,F1、F2应小于150~200N。
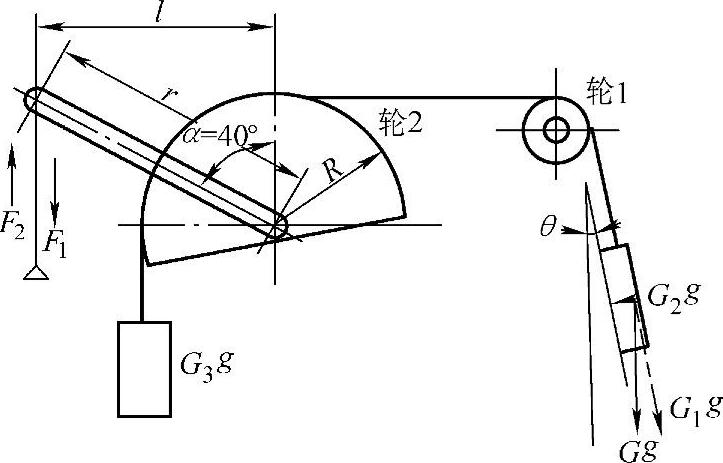
图11-74 手动轮柄式机构
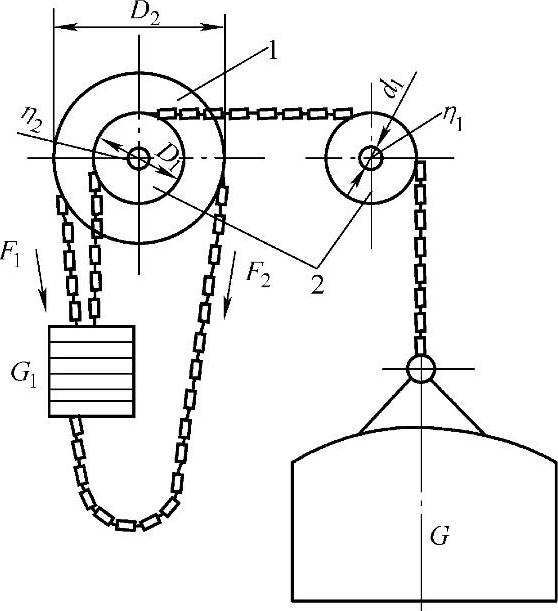
图11-75 直接传动手动链轮升降机构
1—传动链轮 2—吊挂炉门链轮
3.减速传动手动链轮升降机构
如图11-76所示。取平衡锤质量G1=炉门质量G,设各传动轴的机械效率为η1、η2、η3,则
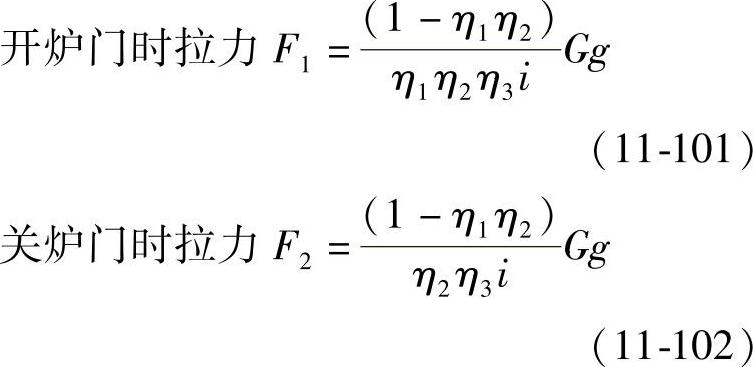
式中i为传动机构减速比, 。
。
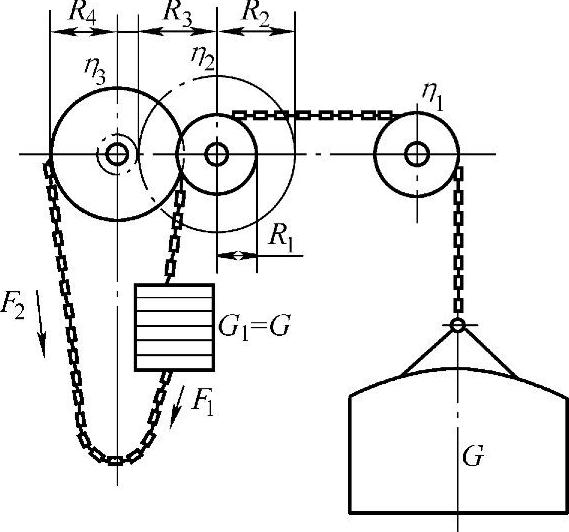
图11-76 减速传动手动链轮升降机构
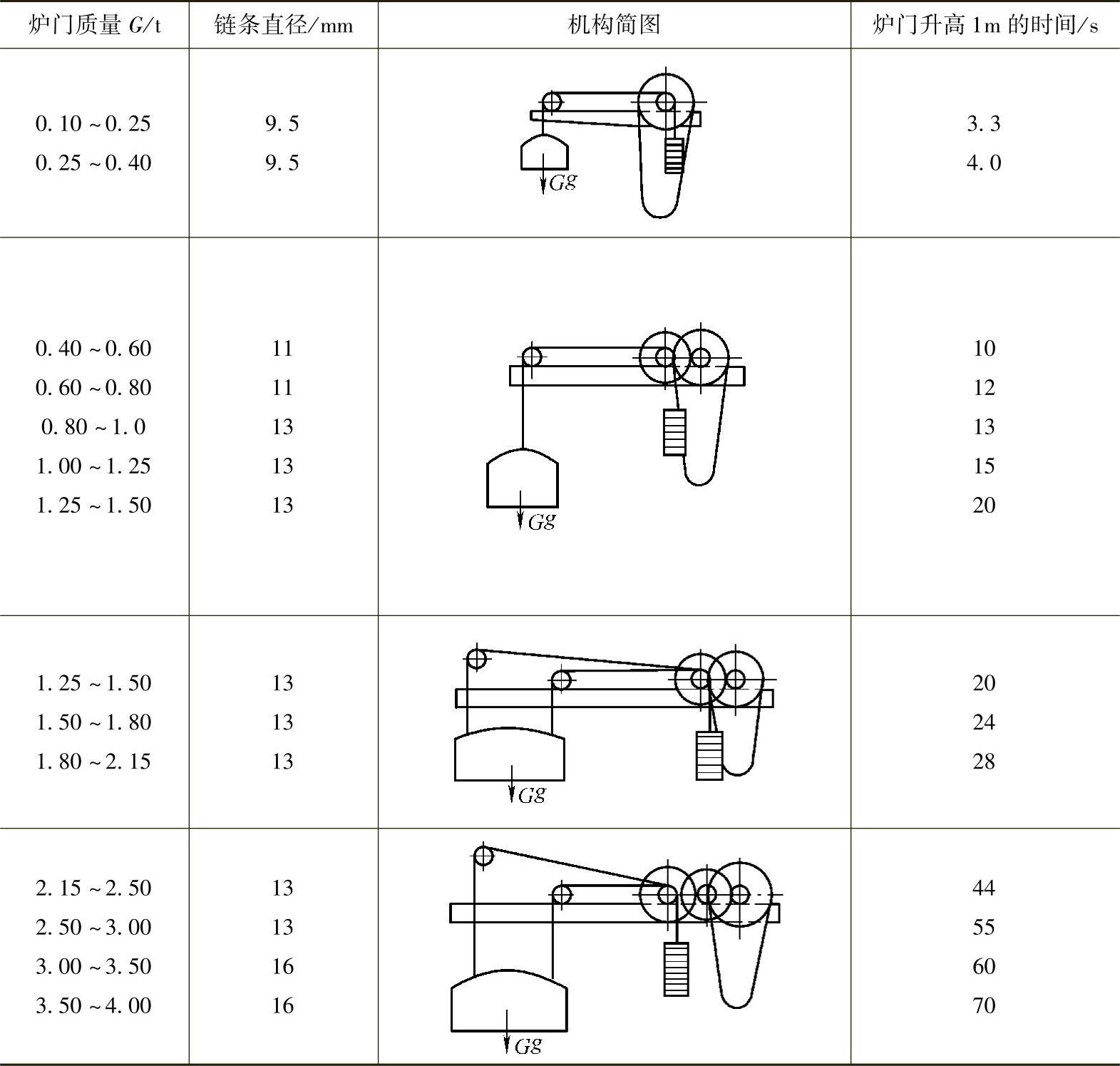
手动炉门升降机构的几项技术参数列于表11-33。
表11-33 手动炉门升降机构技术参数

(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。