



(见图8-9)
自动控制电路主要由输入级运放电路(起到对检测信号倒相、触发双D触发器的作用)、与门电路(处理积分信号、驱动继电器KA0)、输出级双D触发器(用于对输出信号的输出、保持、复位处理)和末级晶体管驱动电路(直接驱动继电器)组成。
控制电路的核心部件为双D触发器,型号为CD4013,内含两个独立的D触发器。从R、S或C端子接受上升沿触发信号,能使输出状态产生翻转。常用来组成单稳态、双稳态、无稳态电路。如图8-10所示,是内部一路D触发器的引脚功能图。
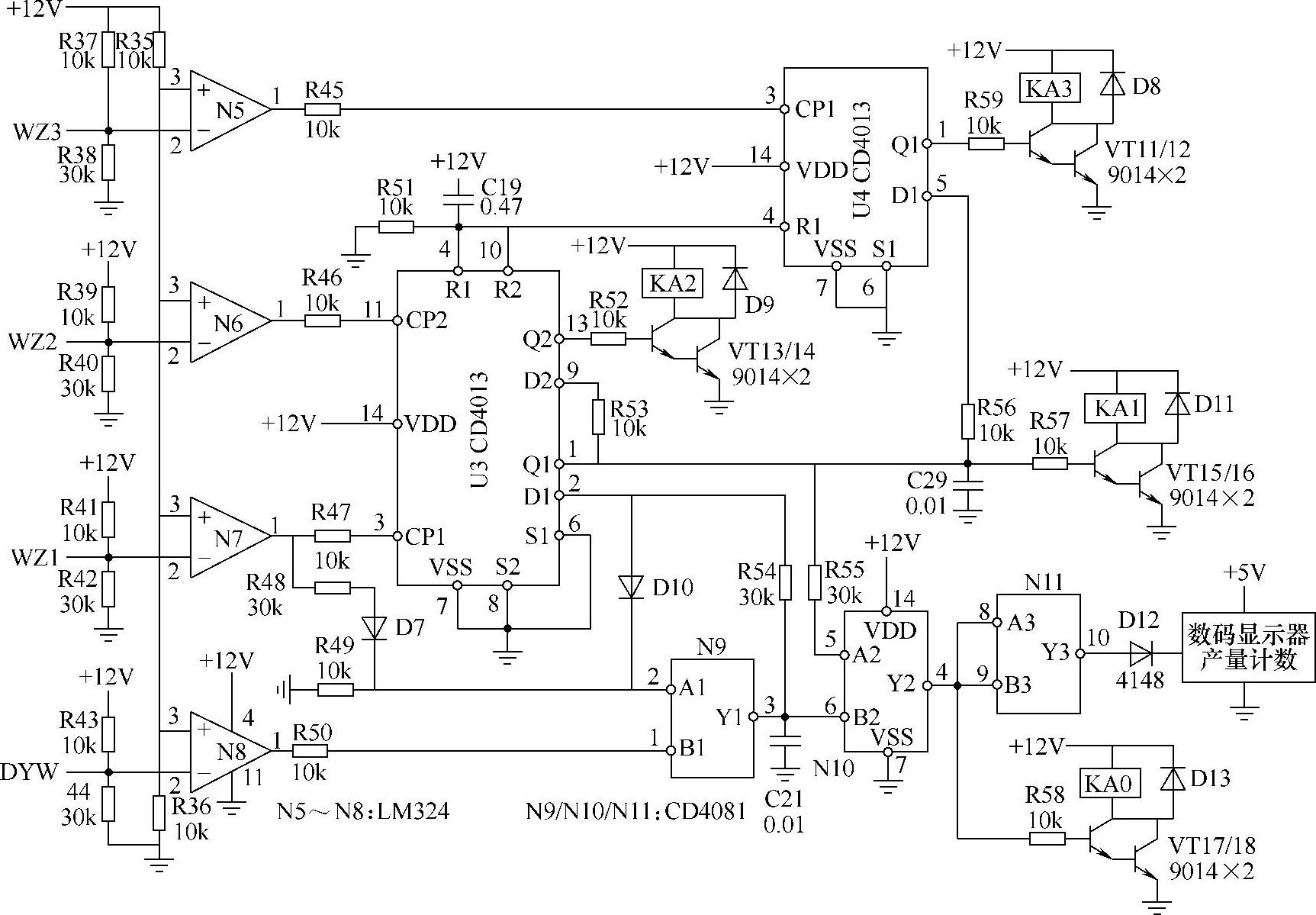
图8-9 BYK-3C自控装置的自动控制电路
CD4013的一般应用:
1)双稳态电路。在数据端D和时钟端C都接地的情况下,在置位端S加一个脉冲高电平,则Q输出端变为高电位(被置位);在复位端R加一个脉冲高电位,输出端Q变为低电位(被复位)。Q端为Q端的反相输出。
2)数据检出电路。置位端S和复位端R都接地的情况下,在C端时钟脉冲作用下,D数据端的数据(0或1)被传输至输出端Q。D端只有0或1两个数据状态,C端上升沿脉冲作用期间,D端的数据为Q端所检出。
本例电路中,是对D端数据检出电路的应用——将数据置0或置1,将D数据传输至Q端的处理,完成了数据“1”检出(驱动继电器)、数据“1”保持(保持驱动)、新数据“0”检出(继电器复位)的控制任务。
下面简述一下自动控制电路的工作过程:
N5~N8四级运放电路组成电压比较器电路,用于对检测信号进行倒相和缓冲,其同相输入端用电阻对+12V分压取得6V基准电平,用于与反相端输入电压信号相比较,提高抗干扰能力。(https://www.xing528.com)
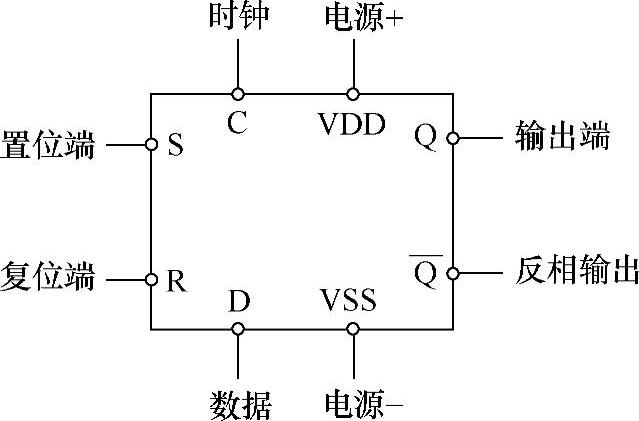
图8-10 CD4014的引脚功能图
1)当“有编织袋”的低电平信号进入N8反相端,N8输出端变为高电平,随后WZ1位置信号进入N7的反相输入端,N7输出端也变为高电平时,①与门电路N9的A1、B1输入端同时变为高电平,“两高出高”的输入/输出逻辑关系成立,N9的Y1输出端3脚变为高电平信号;②N9输出的高电平信号经R54引入双D触发器U3的数据端D1,使其数据状态变为1。C19、R51为D触发器上电复位电路,设备上电时,提供一个高电平脉冲,使3路D触发器均可靠复位,Q端为低电平的初始状态。③WZ1信号也经R47引入U3的时钟端CP1,在时钟上升沿时钟信号作用下,D数据被传输至输出端Q1,Q1变为高电平并保持。晶体管VT15/16为Q1端高电平驱动而导通,继电器KA1得电动作,印板1下落印刷;Q1的高电平信号经R53引入U3的D2端,使其数据状态置1;Q1的高电平信号也经R56引入U4的数据端D1,使其数据状态置1;④Q1变为高电平后,与门N10的A2、B2输入端同时变为高电平,继电器KA0得电动作,驱动电磁阀(控制电路略),机械装置进入印刷区位。
DYW与WZ1两信号的同时作用,同时形成KA0、KA1的动作信号,使机械装置进入印刷区位、印板1下落,完成第一次印刷动作;KA1的动作信号,同时将U3的数据端D2、U4的数据端D1置为1,为后续WZ2、WZ3位置信号到来时,U3、U4的D/Q端的数据“1”传输做好准备,以驱动继电器KA2、KA3。
2)WZ2位置信号形成时,电压比较器N6输出的高电平信号,输入U3的CP2时钟端,D2端的“1”数据被传输至Q2端,并保持。继电器KA2被驱动,产生吸合动作,印板2下落印刷。
3)WZ3位置信号形成时,电压比较器N5输出的高电平信号,输入U4的CP1时钟端,D1端的“1”数据被传输至Q1端,并保持。继电器KA3被驱动,产生吸合动作,印板3下落印刷。
以上为位置信号轮盘上半周内发送的WZ1~WZ3信号,及相关控制动作过程。此后,随编程袋(印刷完毕)从机器内吐出,①DYW“有编程织袋”信号消失,N9的“逻辑与”不成立,KA0失电,机械装置部分“机械复位”。②N9的3脚变为低电平,经R54引入U3的数据端D1,将数据状态置0,为印刷板1的复位(KA1失电)做好准备;③信号轮盘进入下半周,WZ1~WZ3信号又依次产生。
4)信号轮盘进入下半周,①WZ1信号产生,U3的CP1端输入触发信号,D1的“0”数据被传输至Q1端,KA1失电,印板1复位;②Q1变为低电平,经R53、R56引入U3的D2端,U4的D1端,使数据端置0;③随着WZ2、WZ3信号的产生,U3的D2、U4的D1数据“0”被传输至Q端,KA2、KA3均失去驱动信号而释放,印板2、印板3产生机械复位,为下一次印刷做好准备。
当DYW与WZ1信号再度同时作用时,U3、U4的D端数据又再度置1,开始第二个印刷流程。
以上A、B、C、D四个控制步骤,完成了上述2~5工步的控制过程。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。