



(见图6-11)
【逆变电路的前级驱动电路】 逆变电路的前级驱动电路,用于对PWM脉冲形成电路输出的两路互补PWM脉冲,进行预放大,以一定的功率驱动脉冲变压器。将图6-11中的前级脉冲驱动电路,重绘如图6-12所示,分析一下工作原理。
脉冲调制电路或称为PWM脉冲生成器KA3525A(SG3525A)在11脚和14脚输出的互补(信号极性相反)PWM脉冲,分别输入由VT1、VT2和VT3、VT4组成的射极输出互补推挽放大器,对输入信号进行放大后,再驱动后级由VT5~VT8组成的桥式驱动电路。VT1~VT4和VT5~VT8组成的互补推挽放大电路与图6-10相比,后者输入信号由脉冲变压器的4个独立绕组相隔离,互补放大器可由同型号场效应晶体管构成,前者只输入两路信号,每对互补管(如VT1、VT2或VT5、VT8)需采用极性相对应的互补管,对输入信号的高电平和地电平分别作出输出反应。当KA3525A的11脚脉冲信号为高电平期间,互补推挽放大电路VT1导通,D1将反向栅偏压引入VT7的栅极,使VT7处于截止状态。同时又经R3为VT6引入正向栅偏压,使VT6导通。此时在14脚地电平信号作用下,VT5同时导通,形成OCS2端子为+、OCS1端子为-的脉冲激励信号;当KA3525A的11脚脉冲信号为地电平期间,互补推挽放大电路VT2导通,VT1截止。VT2的导通一方面提供场效应晶体管VT6栅-阴结电容存储电荷的泄放通道,保障其快速截止,另一方面将C1的左端近于接地,C1和VT7的栅-阴结电容存储电荷对地放电,产生“拉出电流”,使VT7栅极相对于源极出现负电压,VT7具备导通条件而导通。此时在14脚脉冲信号作用下,VT8同时导通,形成OCS1端子为+、OCS2端子为-的脉冲激励信号。
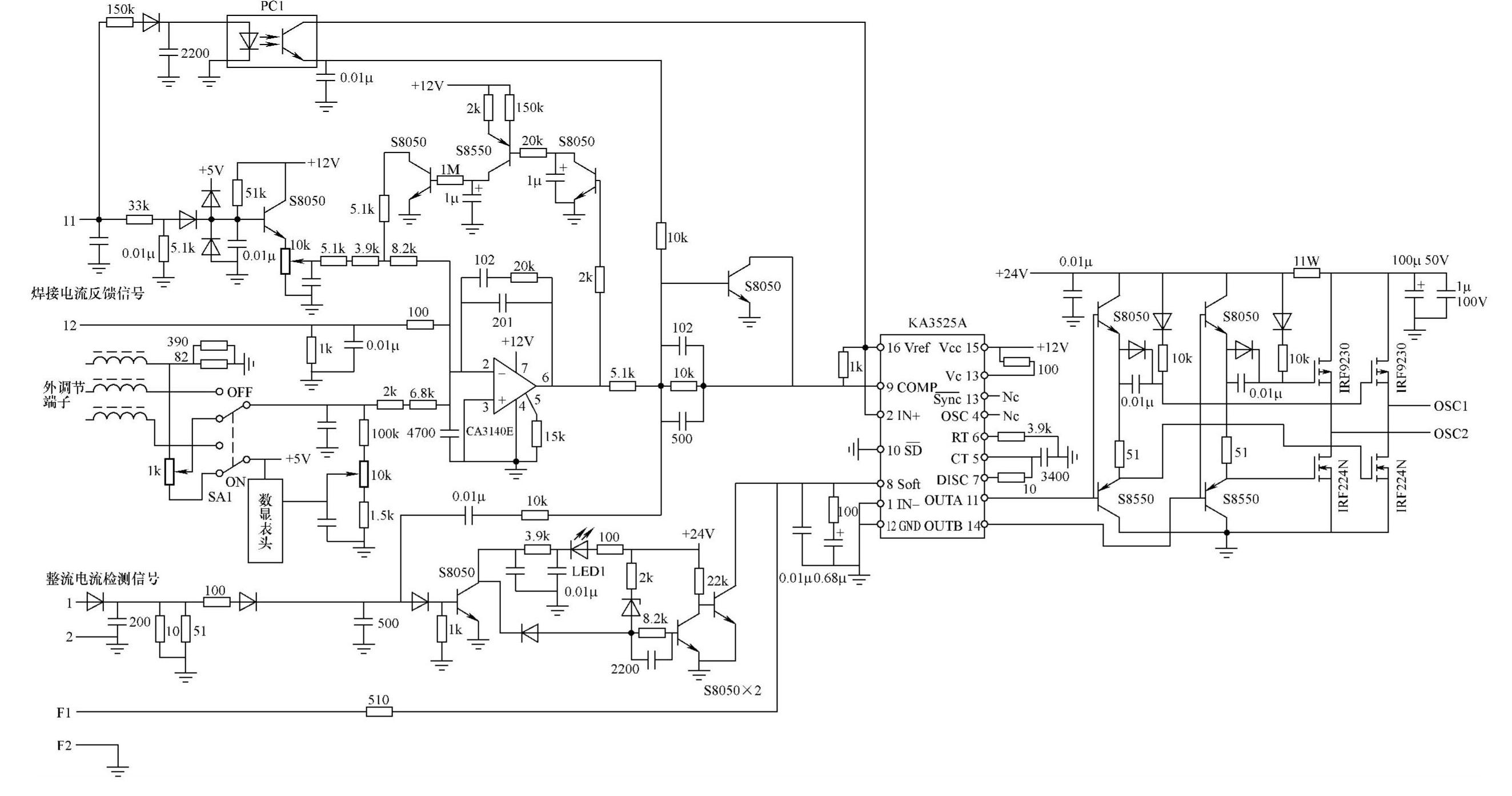
图6-11 ZX7-315逆变焊机的PWM脉冲形成、驱动电路、PI控制和保护电路

图6-12 ZX7-315逆变焊机的前级脉冲驱动电路
在KA3525A的两路互补脉冲信号作用下,VT5~VT8互补桥式驱动电路输出脉冲信号,驱动脉冲变压器(见图6-9),进而使逆变功率电路工作,将直流电源逆变为交变电源,供输出整流电路。二极管D1为钳位二极管,使VT7的驱动电压降在栅-阴极结电容上;二极管D2和R1则提供VT7的反向栅偏压通路,使其可靠截止。
【PWM脉冲形成电路】 是以PWM脉冲生成器KA3525A为核心组成的PWM脉冲形成电路。KA3525A为塑封双列16引脚元件,系采用双极型工艺制造的新型模拟/数字混合集成电路,整体功能同电源振荡芯片UC3844相似,并更为完善。其主要特点和电参数如下:输出极采用推挽输出;双通道输出;输出脉冲占空比0~50%可调;输出拉、灌电流能力达200mA;工作频率高达400kHz;工作电压范围宽,达8~35V。有基准电源输出端,输出稳定基准电压5.1V。
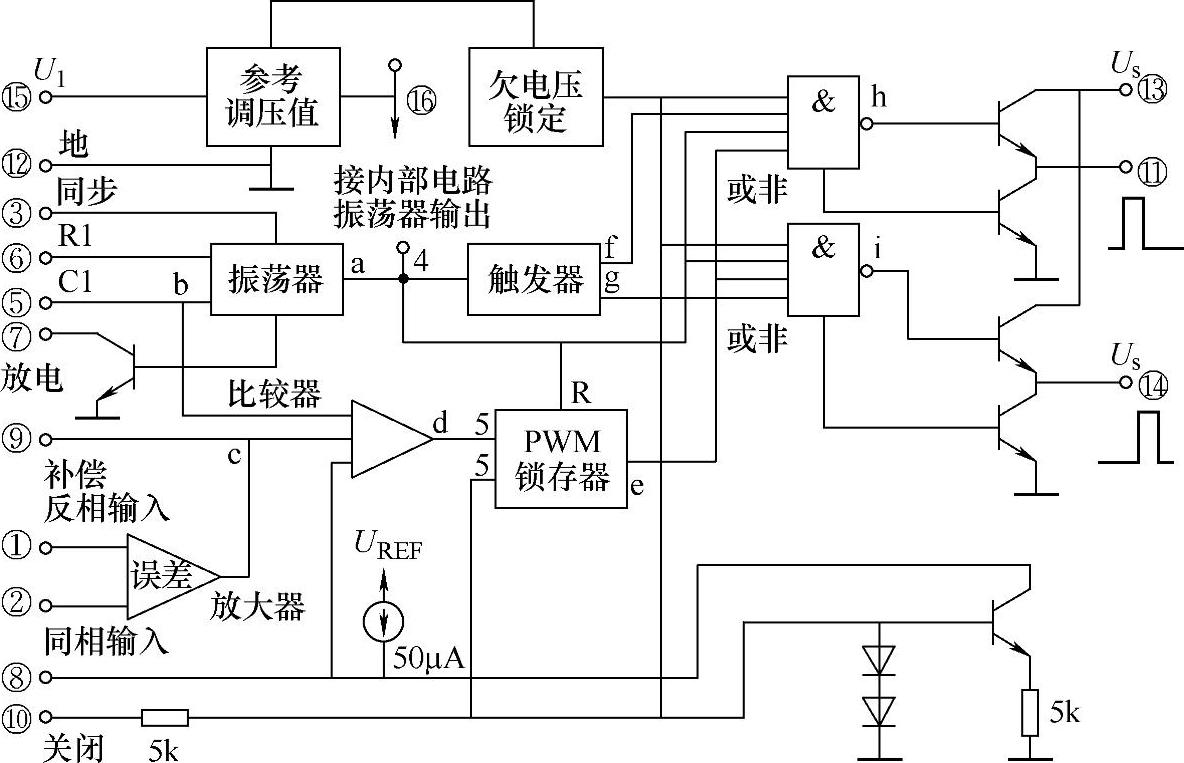
KA3525A芯片内部电路功能框图及关键点波形如图6-13、图6-14所示。
KA3525A内含振荡器,与外接定时元件形成振荡脉冲,决定输出脉冲的频率;比较器电路,可引入反馈电流或反馈电压,构成闭环控制;PMW锁存器、触发器和后级或非门电路,组成PWM脉冲生成电路,并经互补推挽放大电路放大后,进行双通路输出。下面简述其工作原理:
+12V供电电源从15脚引入KA3525A内部电路后分两路,一路作为内部逻辑和模拟电路的工作电压。另一路送到基准电压稳压器的输入端,产生5.1(1±1%)V的内部基准电压从16脚输出,一般供电压比较器用于比较基准;如果15脚供电电压低于门限电压8V,该芯片内部电路锁定,脉冲输出禁止;13脚Vc端子为末级推挽电路供电端,一般与15脚短接或串接限流电阻后再与15脚连接;5、6、7脚内部与外部元件一起构成振荡器电路,5脚外接振荡定时电容,6脚外接振荡定时电阻。6脚外接电阻提供振荡电容的充电通路,7脚外接电阻元件提供振荡电容的放电通路。5、6、7外接R、C元件,决定着电路的振荡频率。5脚振荡电容两端锯齿波电压变化范围为0.6~3.5V。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-13 PWM脉冲形成芯片KA3525A原理框图
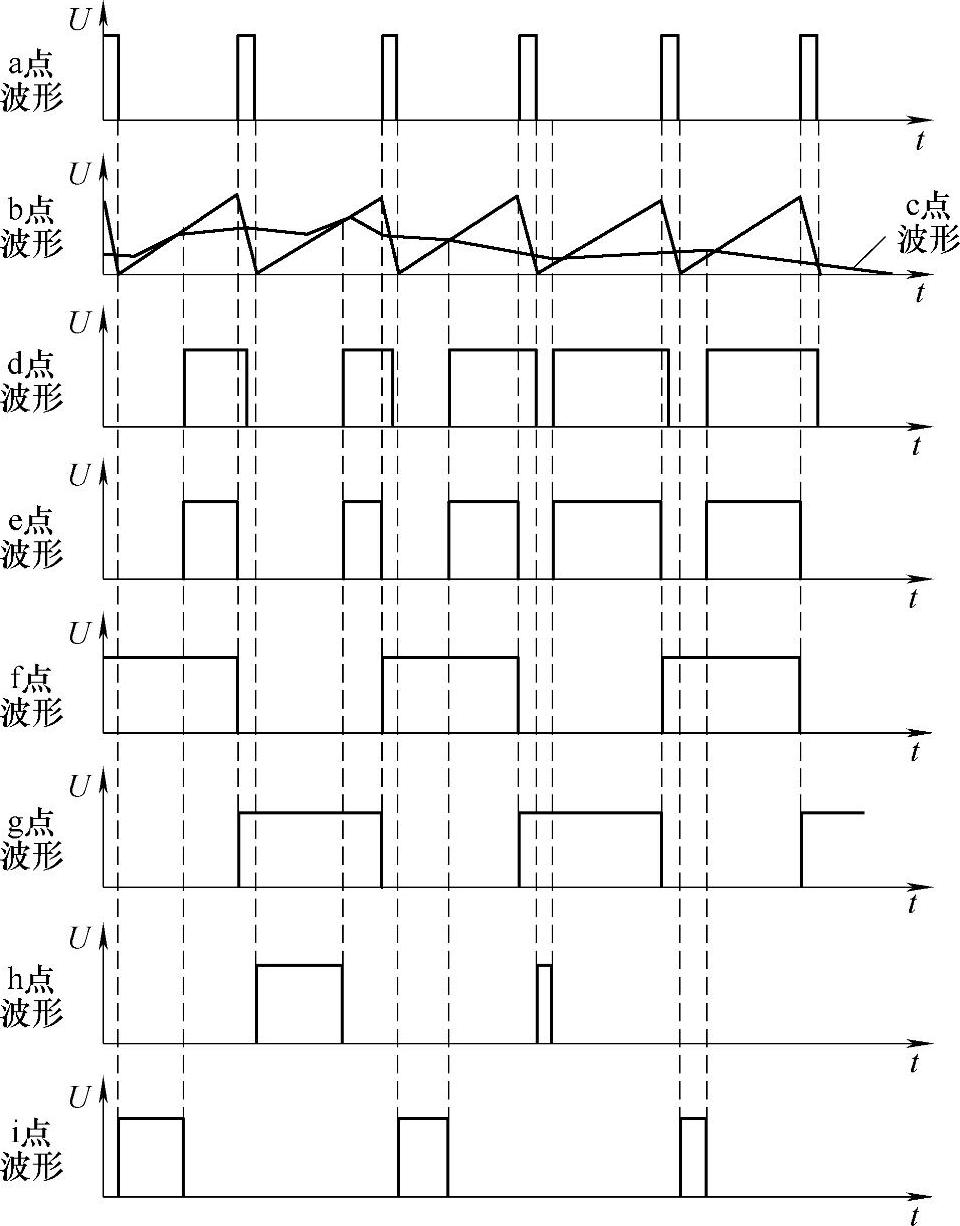
图6-14 脉宽调制器KA3525A关键点波形图
振荡器的输出分为两路,一路以时钟脉冲形式送至双稳态触发器及两个或非门;另一路以锯齿波形式送至比较器的同相输入端,比较器的反向输入端接误差放大器的输出,误差放大器的输出与锯齿波电压在比较器中进行比较,输出一个随误差放大器输出电压高低而改变宽度的方波脉冲,再将此方波脉冲送到或非门的一个输入端。或非门的另两个输入端分别为双稳态触发器和锯齿波振荡器。双稳态触发器的两个输出端互补,交替输出高低电平,将PWM脉冲输入末级推挽电路处理和放大为相位相差180°的两路脉冲输出信号。
KA3525A的软起动接入端(引脚8)上通常接有一只软起动电容。上电过程中,由于电容两端的电压不能突变,因此与软起动电容接入端相连的PWM比较器反向输入端处于低电平,PWM比较器输出高电平。此时,PWM锁存器的输出也为高电平,该高电平通过两个或非门加到输出晶体管上,使之无法导通。只有软起动电容充电至其上的电压使引脚8处于高电平时,KA3525A才开始工作。由于实际电路中,基准电压通常是接在误差放大器的同相输入端上,而输出电压的采样电压则加在误差放大器的反相输入端上。当输出电压因输入电压的升高或负载的变化而升高时,误差放大器的输出将减小,这将导致PWM比较器输出为正的时间变长,PWM锁存器输出高电平的时间也变长,因此,输出晶体管的导通时间将最终变短,从而使输出电压回落到额定值,实现了稳压控制。反之亦然。
10脚为PWM锁存器的一个输入端,一般接入过电流或过/欠电压保护信号,当输入故障保护信号大于0.7V时,内部晶体管导通,PWM输出通道被强制关断。外接关断信号对输出极和软起动电路都起作用。当10脚上的信号为高电平时,软起动电容将开始放电。如果该高电平信号持续,软起动电容将充分放电,直到关断信号结束,才重新进入软起动过程。
同步端(引脚3)主要用于多只KA3525A之间的外部同步,同步脉冲的频率应比振荡频率略低一些。单片应用时3脚可空置。
1脚为内部误差放大器的反相输入端,2脚为同相输入端,9脚误差信号输出端,误差信号同时输入内部比较器电路。同相输入端一般引入由16脚5.1V基准电压用电阻分压所得2.5V电压,以便于与1脚输入的电压反馈信号(取自电源输出端的输出电压反馈信号)相比较,以输出电压误差信号。在1、9脚之间接有R、C元件,以决定误差放大器的电压放大倍数和幅频、相频特性。9脚又称为补偿端,其信号电压变化范围为1.5~5.2V。
【PI控制电路】 以运算集成电路CA3140E为核心组成PI控制电路。转换开关SA1为“本地控制”和“远地控制”切换开关,用于切换外接电流调节电位器和电流调节电位器的接入,电流调节信号经1kΩ电位器中心头,一路输入至积分放大器CA3140E的反相输入端,一路经分压电路调整,以满足数显表头所适应的输入电压范围,用于电流调节值的显示。从整流输出端子分流器上取得的焊接电流反馈信号,也经晶体管放大电路、信号幅度调整电路等处理后,输入积分放大器CA3140E的反相输入端。经CA3140E处理放大后的PI控制信号,输入KA3525A的9脚(误差电压输出端),进而控制PWM脉冲形成电路输出的脉冲占空比,对输出焊接电流实施控制。
【过电流保护电路】 过电流/过电压保护,是由控制KA3525A芯片8脚的软起动控制信号电压值来实现的(参见图6-11)。从电流互感器TA1上取得的整流电流检测信号,在10Ω、50Ω并联电阻上转化为电压信号。过电流信号发生时,保护电路的晶体管导通,LED1点亮,做出过电流指示,同时保护电路使KA3525A的8脚变为低电平,KA3525A内部锁存器动作,PWM脉冲被禁止输出,实现了过电流保护。
(试分析)从焊接变压器的一个绕组及内部电路(见图6-10中OHD3-95M器件)取出的输出电压信号,经F1、F2端子线也输入KA3525A的8脚(软起动控制端),当浪涌电压出现时,F1、F2端子线呈现低电阻,8脚电压降低,KA3525A输出的脉冲占空比减小,焊接变压器二次侧输出电压降低,避免了浪涌电压的冲击。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。