



(1)脉冲驱动电路 脉冲驱动电路采用四片专用驱动芯片IR2110,每片内含两路(逆变主电路下、上桥臂)相隔离的驱动输出电路,具有2A电流驱动能力,适应主电路供电500V以下的逆变电路,可直接驱动100A以下CMOS或IGBT(模块)。IR2110的内部原理框图如图5-9所示。
IR2110内部有低压和高压两个独立的驱动脉冲传输通道。SD端为关断控制端,可输入故障停机保护信号。当SD端输入高电平时,将同时关闭两通道输出信号。SD端连接着内部一个滤波电路,当输入高电平信号持续时间大于500ns时,才输出封锁信号,可避免由干扰脉冲导致的误动作。
HIN为高压通道(输出电路驱动上桥臂IBGT)的信号输入端,高压通道的供电端为VB、VS端,HO端为驱动脉冲输出端,输出电压范围10~20V。输出电路形式为推挽电路,上管导通时输出正向驱动脉冲,下管导通时,提供所驱动管Cge电容的电荷泄放通路,使其截止。欠电压自锁电路检测VB、VS端的供电电压值,小于8.7V时,会锁定输出电路,禁止脉冲信号输出。
LIN为低压通道(输出电路驱动下桥臂IBGT)的信号输入端,低压通道的供电端为VCC、COM端,LO端为驱动脉冲输出端,输出电压范围10~20V。输出级电路也为两只推挽相接的MOSEFT管组成,供电端为VCC、COM端,内部电路检测VCC、COM端之间的供电电压,当低于8.6V时,锁定输出端口,避免被驱动开关管因欠激励造成导通损耗加大而烧毁。
IR2110完善的设计,使它自身可对输入的两个通道信号之间产生合适的延时,保证加到被驱动的同桥臂上的两个功率MOS器件的驱动信号之间有一个互锁时间间隔(即两管导通衔接期的死区时间),能省去相关处理电路,防止了被驱动的逆变桥中两个功率MOS器件同时导通对电源造成的短路。
VDD、VSS为输入信号电压供电端,供电电压一般在+5~20V。
IR2110的典型应用电路如图5-10所示。
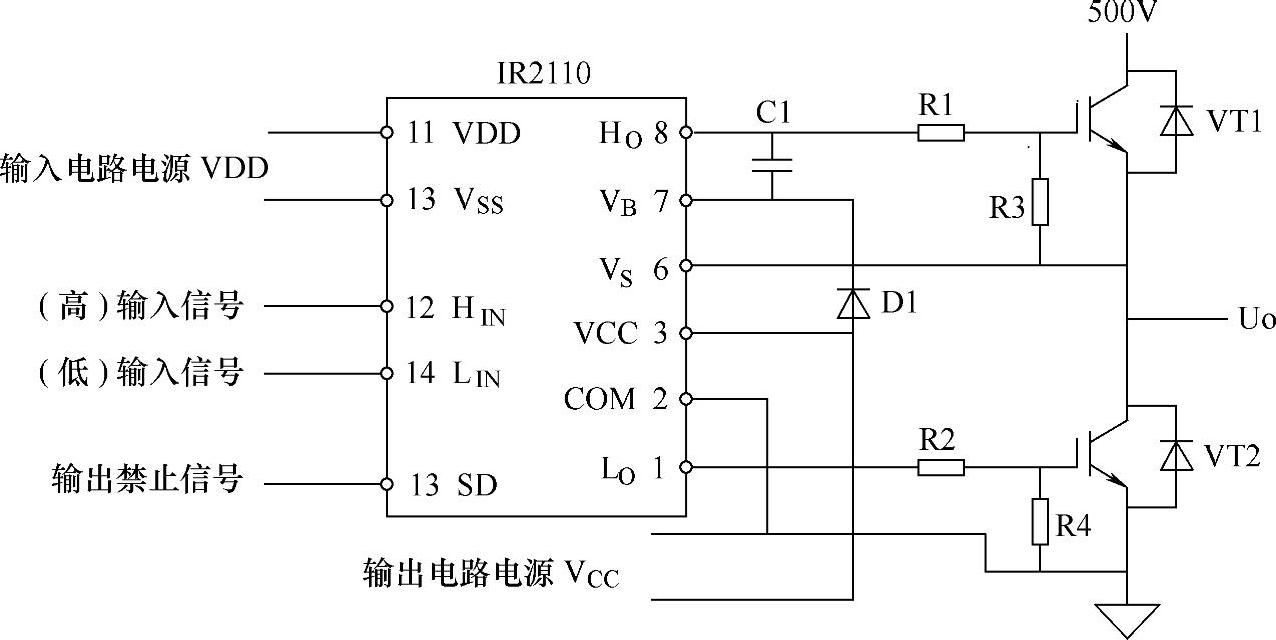
图5-10 驱动芯片IR2110的典型应用电路
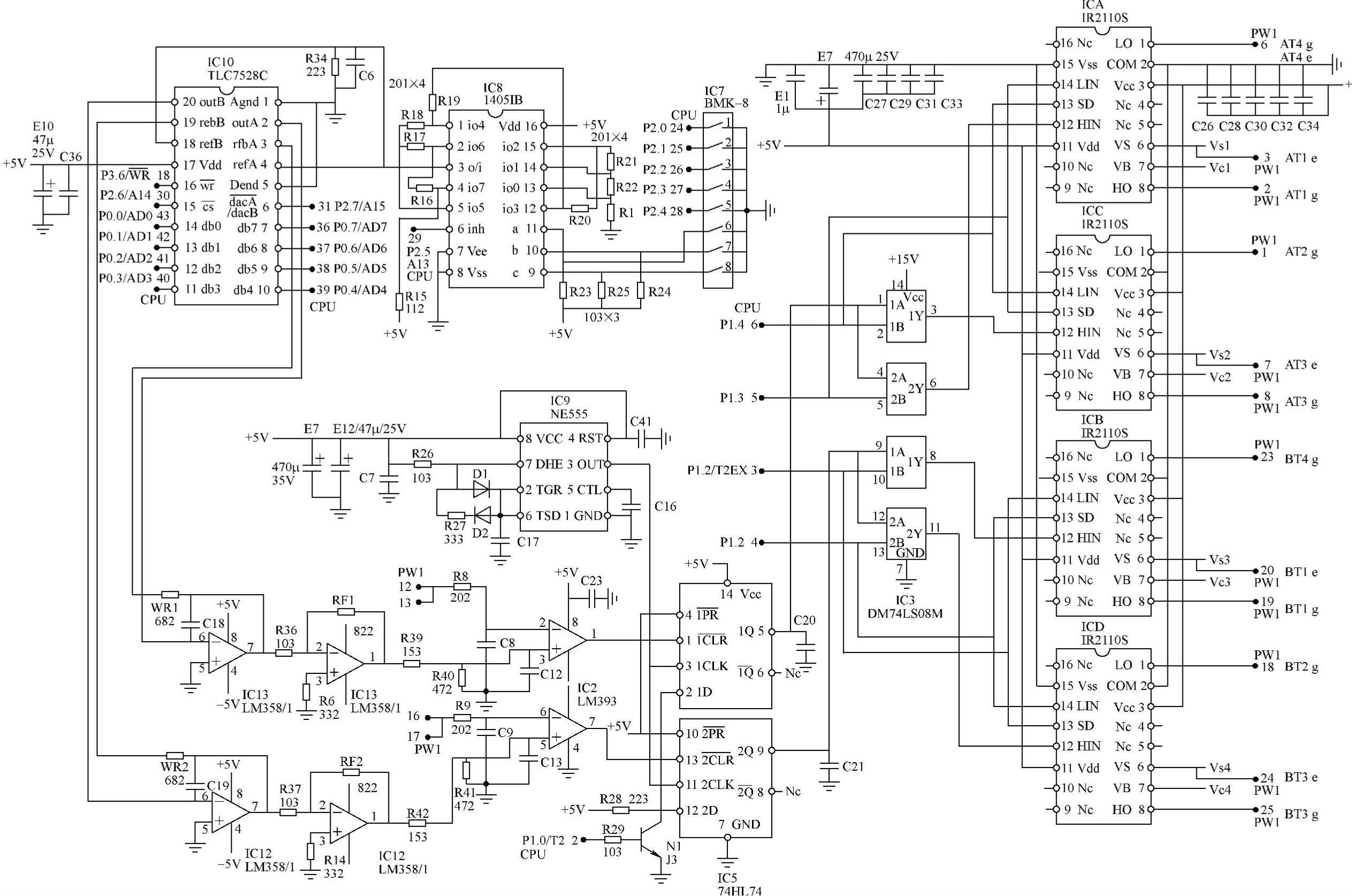
图5-11 CQA36X8A步进电动机驱动器的脉冲和保护电路
两通道输入信号由HIN、LIN端子进入,VDD、VSS为输入信号电路供电电源;高、低输出通道共用一组VCC电源,高压通路供电端VB、VS之间接有自举电容C1,与所驱动开关管配合,形成高压通道的“悬浮供电”:当低压通道输出驱动信号,下桥臂开关管VT2受驱动而开通时,相当于将VS端与COM端子短接,电源VCC经D1形成VCC→D1→C1→VT2→COM的充电电流通路,使C1上电压接近VCC电压值;VT2截止,高压通道输出驱动信号令VT1导通时,Uo(VS)端变为500V高电平,D1反偏截止,但C1两端仍维持上正下负的接近VCC的电压值,C1上电压变为高于500V的“自举电压”。这一电压值因D1的截止与电源回路断开,而变为“悬浮电压”。C1上电压作为高压通道的“暂时电源”,在HO信号作用下,C1放电电流变为VT1栅、阴极的驱动电流,使VT1导通。当VT1再度关断,VT2导通时,C1又被再度充电。增加了D1、C1自举电路,使高、低压信号通道可以共用一路VCC供电。
但本例电路(见图5-9驱动电路部分)没有应用自举电路,四路IR2110驱动电路的低压通道电源VCC、COM端,因形成信号共地,共同引入开关电源的+15V电源供电;四路IR2110的高压通道电源VB、VS端,则分别引入由图5-8电路输出的Vc1~Vc4相隔离的四组独立供电。
(2)细分/电流设定与保护电路 步进驱动器在使用中,通常有两个必须要调节的参数值,即细分数和输出电流值。前者决定着负载电动机步进角的大小,实质为输出脉冲宽度的大小;后者决定着驱动器输出电流的能力和范围,实质为电流保护的起控点,这从本例电路即可看出。对细分数的设置,由8位拨码开关(BMK-8)IC7前5位开关的位置所决定,实际为5位的2进制信号,可形成32级的细分信号,但一般步进驱动器仅10级左右的调整范围。细分整定信号直接输入CPU的P2 I/O接口,经内部程序运算,控制其输出脉冲电压的宽度,达到控制步进电动机步进角大小的目的。
拨码开关IC7、8选1模拟开关IC8(14051B)、双通道D-A转换电路IC10(TLC7528C)和CPU内部电路组成电流设定电路。D-A转换电路IC10、运算放大器IC12(LM358)、IC13、双上升沿触发器IC5(74HC74)、时钟信号振荡器IC9(NE555)和与门电路IC3(74LS08)等电路组成电流设定和过电流停机保护电路,以形成A、B相电流比较信号和故障时输出停机保护信号,见图5-11。
【电流设定与电流比较信号形成电路】 图5-12中,IC8是一个带禁止端的8选1模拟开关电路,8路模拟电压输入端接有R15~R22、R1的分压网络,3脚为8选1信号输出端,9、10、11脚为8选1切换控制端。IC7电路结构如同一个单刀八掷的切换开关,切换动作由9、10、11脚数字信号状态决定,IC7拨码开关能形成23=8的8挡位切换控制,当6、7、8等3只开关均处于OFF状态时,9、10、11脚输出的3位二进制信号为111,IC8的4脚io7与3脚接通,R16上分压最高(3V),3脚输出电流设定信号最大;当6、7、8等3只开关均于ON状态时,9、10、11脚输出的3位二进制信号为000,IC8的13脚io0与3脚接通,R1上分压最低,3脚输出电流设定信号最小(0.37V)。当输出禁止端6脚输入CPU信号控制信号为高电平时,模拟开关处于关态。
【数-模(D-A)转换电路】 TLC7528是双路8位D-A转换器,具有数据锁存功能。数据通过公共输入口传送至两个D-A数据锁存器的任一个。该器件能方便地与大多数通用微处理器总线和输出端口相连接。图5-12中IC10的左侧电路为数字输入端,DB0~DB7等8个输入端进入的是CPU输入的数字(数据)信号,6、15、16脚为CPU数据总线控制信号输入端,决定着输入信号的装入通道选择、是实时输出还是将输出信号进行锁存处理、禁止信号输入等工作方式。TLC7528C内部原理框图如图5-13所示。
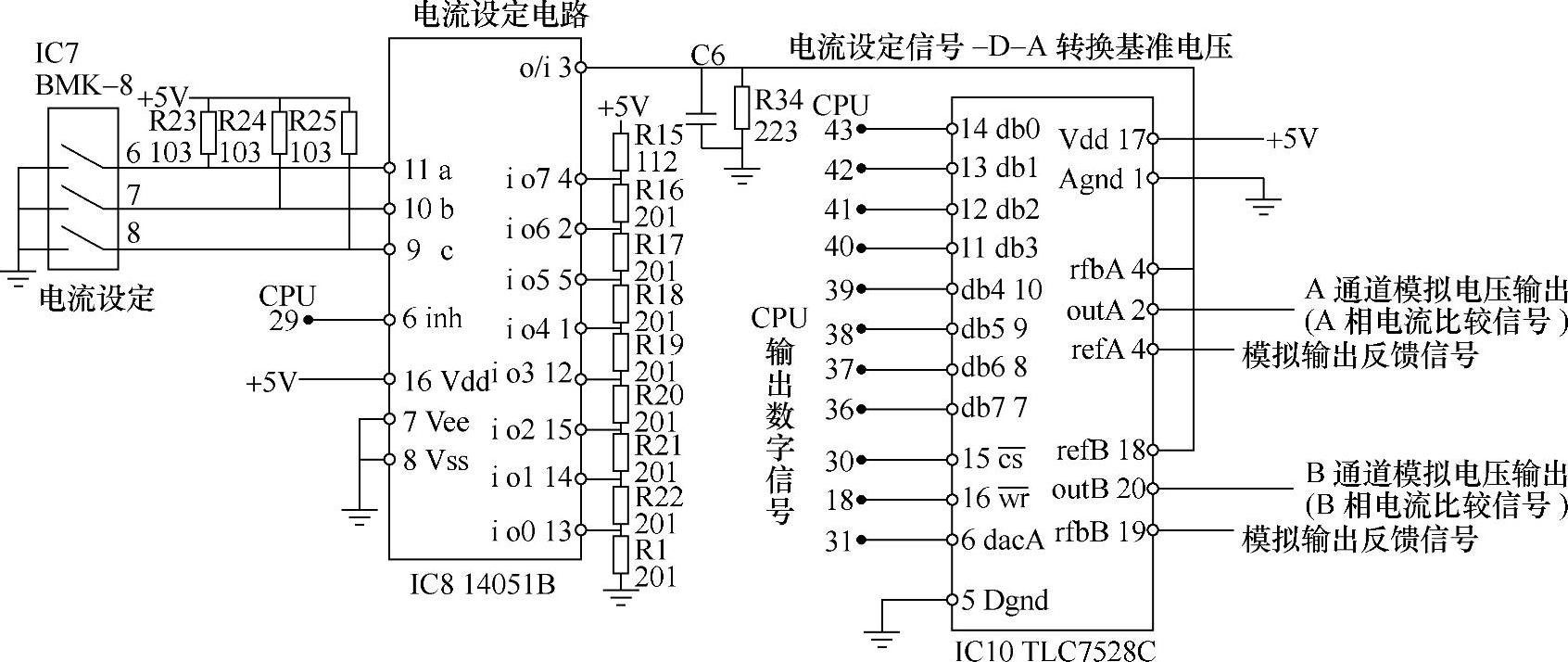
图5-12 电流设定和电流比较信号形成电路(https://www.xing528.com)
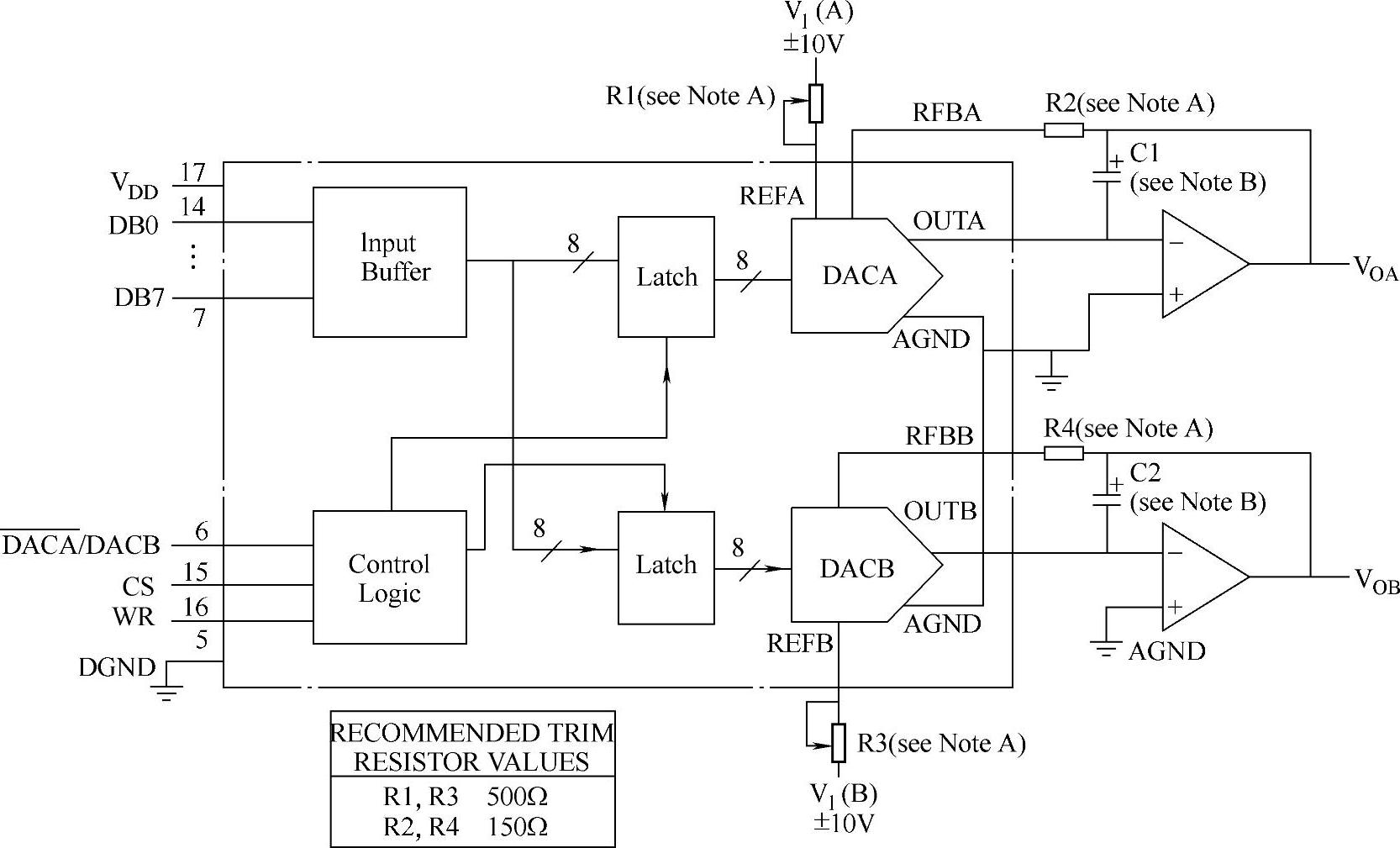
图5-13 TLC7528C内部原理框图
当15、16脚均为低电平时,模拟输出(A通道或B通道,取决于6脚信号)通道对DB0~DB7输入数据作转换输出;当15、16脚变为高电平时,db0~db7输入数据被锁存(保持原模拟输出值不变),直到15、16脚再次变为低电平为止。当15脚保持高电平时,不管16脚控制信号如何,数据输出被禁止。
将输入信号转变为模拟信号输出,D-A转换电路需要一个参考基准电压,该基准电压信号由IC8输入,进入IC10的基准电压输入端,因而输出转换模拟量的大小,取决于基准电压值的大小,对基准电压值进行人工设置,也就完成了对输出模拟电压范围的设置。当然,当基准电压与外围放大电路参数固定时,改变DB0~DB7输入数据,也使输出模拟电压值产生变化。
IC10内部D-A转换电路,需与外部反相放大器配合,完成D-A转换,输出模拟电压。IC10输出端外接过电流故障信号,电路如图5-14所示。
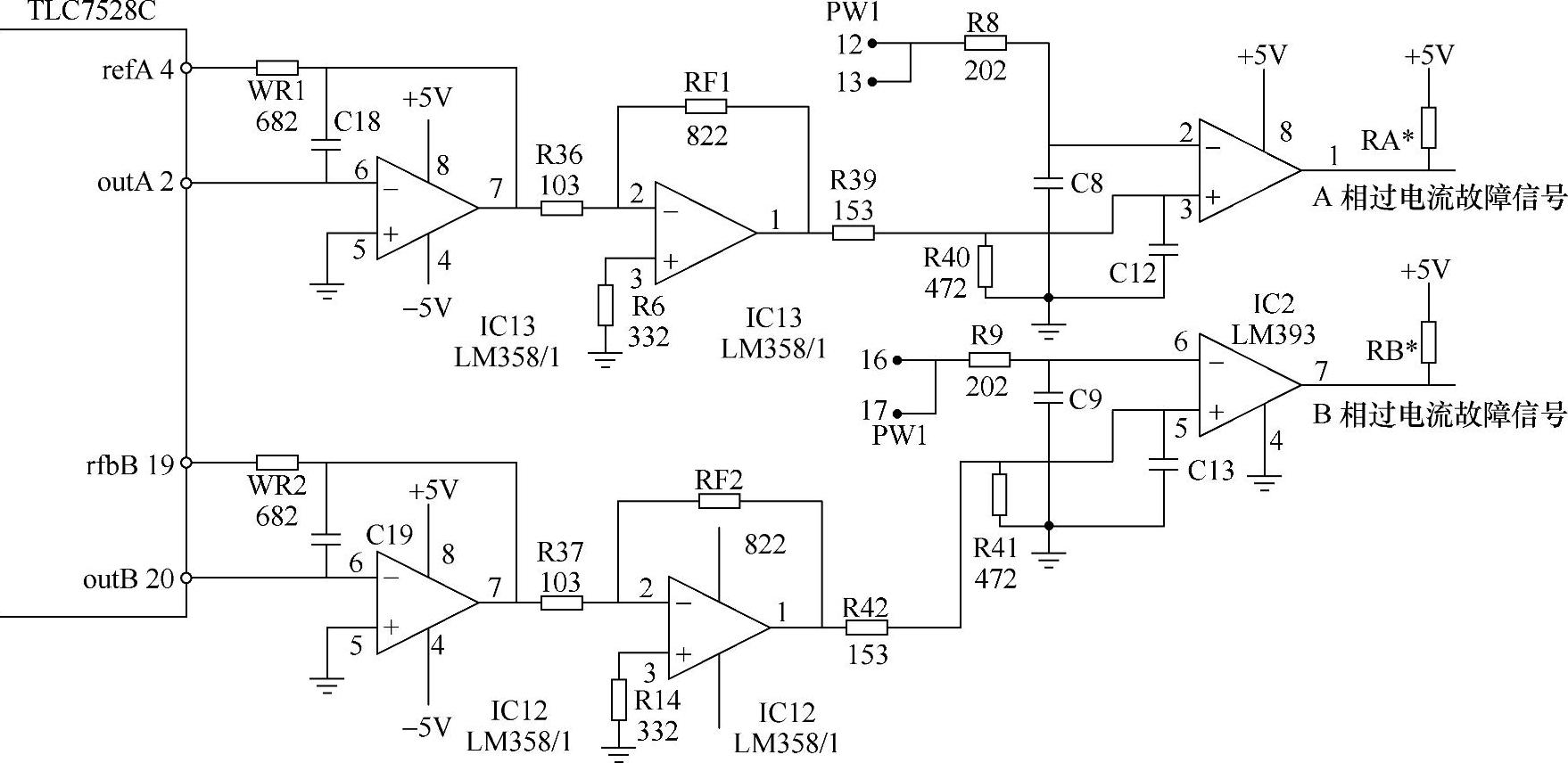
图5-14 过电流故障信号输出电路
IC10(TLC7528C)输出的两路模拟电压信号,因D-A转换参考的基准电压一致,2、20脚输出的电压幅度也是一样的,经IC13、IC12两级反相放大器进行同极性转换与放大,使之适应后级故障信号输出电路的信号输入幅度和极性要求。进入故障信号输出电路IC2的两路电压信号,实质上为经过人工设置→PLC数据输出→D-A电路转换的运行电流基准电压,输入至电压比较器IC2的同相端,与反相端输入的逆变电路的电流检测信号相比较,过电流故障发生时,IC2输出故障停机信号。
输入到IC2反相端2脚的是从电阻AR1取得步进电动机A相绕组的运行电流信号,经PW1的12、13端子引入。输入至反相端6脚的是从电阻BR1取得步进电动机B相绕组的运行电流信号(参见图5-6)。IC2(LM393)内部输出级电路为开路集电极电路(为便于原理分析,在输出端添加了实际电路中没有的RA∗、RB∗两只上拉电阻),当实际运行电流值小于运行电流基准电压信号时,IC2输出端为高电平;当过电流故障发生时,IC2反相端输入电压信号高于同相端电流基准电压,输出端1、7脚变为低电平,将故障停机信号输入后级电路。
从图5-11中摘出A相脉冲传输及控制电路,如图5-15所示。双上升沿D触发器IC5为脉冲传输/关闭控制电路,双输入端与门电路IC3在CPU的2脚信号控制下,完成对CPU输入脉冲信号反相传输的作用,同时,该级电路又是“受控传输器”电路,在过电流故障信号控制下,可以切断IC3对脉冲信号的传输。
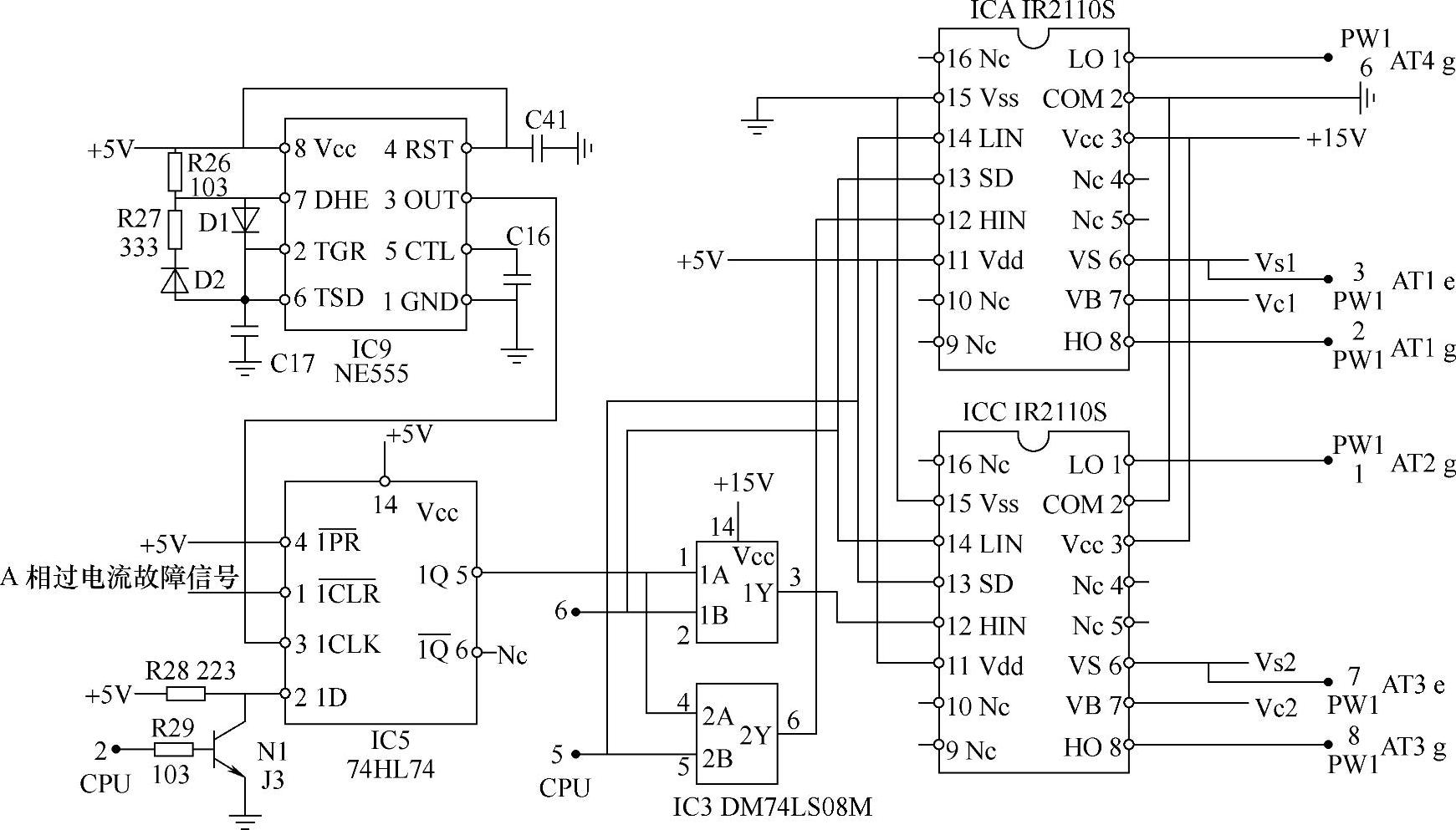
图5-15 A相脉冲传输及控制电路
IC3(74HL74)的内部原理框图及逻辑真值表如图5-16所示:
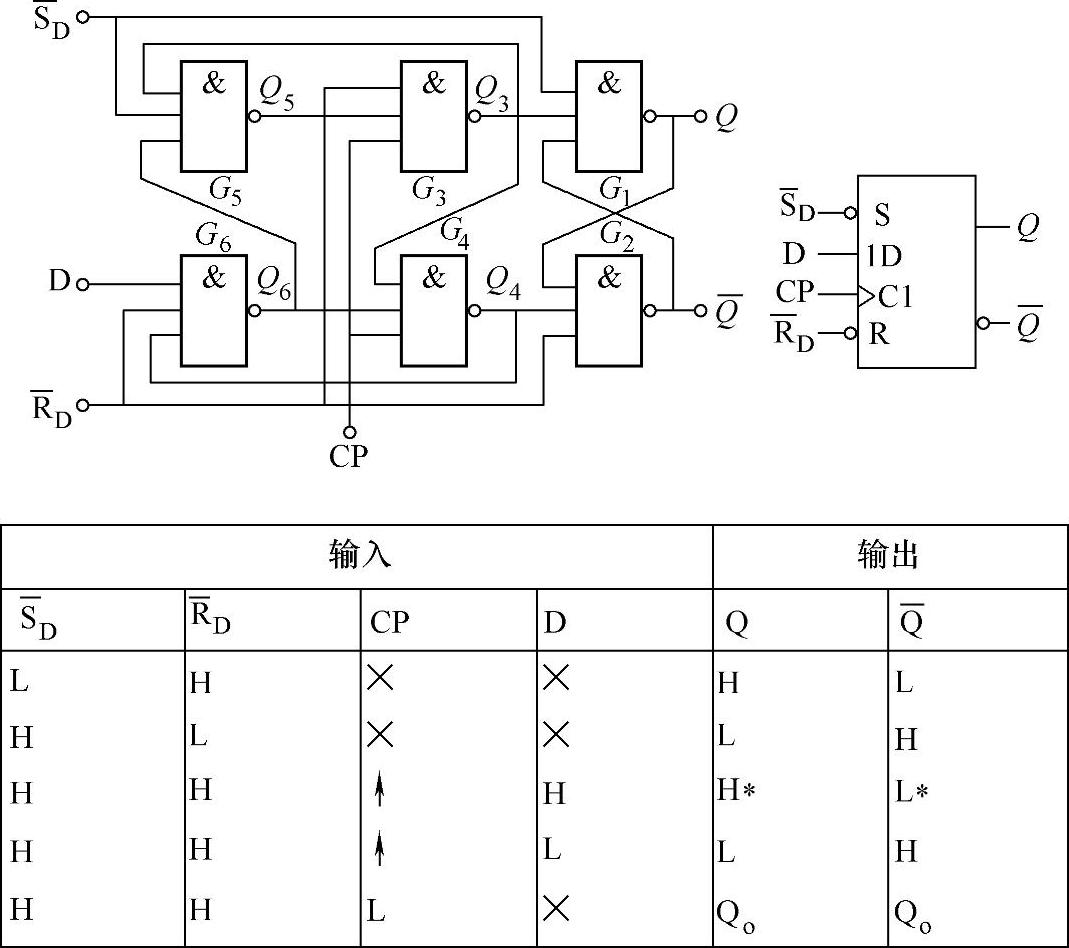
图5-16 双上升沿D触发器74HC74内部原理框图及逻辑真值表
图5-15中的IC9为NE555时基电路和外围元件构成的振荡器电路,提供IC5工作时所需的时钟信号。IC5的置位端5脚,直接接入+5V;复位端1脚和数据端2脚,正常工作状态,均为高电平状态。当故障信号发生时,1脚输入复位低电平,输入脚5脚变为“0”,后级与门电路IC3输入“与”状态被破坏,输入端变为低电平,IR2110驱动电路的高电压通道脉冲信号消失,逆变功率电路停止工作;当因某种控制需要停机时,CPU的2脚输出高电平信号,晶体管N1导通,使数据端2脚变为低电平,同样切断了IC3对脉冲信号的传输。
CPU从5、6脚输出步进电动机A相绕组的脉冲信号。5脚脉冲信号直接输入驱动电路ICA的低压通道LIN输入端,和驱动电路ICC的SD禁止端,即在使主电路开关管AT4、AT1导通的同时,禁止AT2、AT3的输出;5脚信号同时加到IC3的5脚,与前级电路输入的高电平信号相与,IC3输出高电平信号,输入到驱动电路ICA的高压通路HIN输入端,使AT1和AT4同步开通,形成A相绕组的负半波通路。
CPU的6脚输出的脉冲信号,其直通信号和与IC3的1脚输入信号相与后的输出信号,在驱动开关管AT2、AT3开通的同时,向驱动电路ICA输出禁止信号,形成A相绕组的正半波电流通路。B相逆变功率电路同时在CPU的3、4脚脉冲控制下,形成交变电流通路。步进电动机便按脉冲信号的频率的高低和脉冲个数的多少进行运转了。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。