



控制电路由模拟元件的应用向数字元件应用的转化,也许是技术进步的趋势,但电路的性能,是否能因此而得到提升,则是另外的问题。换一个角度,工业控制电路,无论是采用模拟电路还是数字电路,往往是对开关信号的传输和处理。电路的优劣,取决于设计思路,并不取决于采用何种器件。SJDB-5(模拟)保护器和SJDB-5数字式电动机保护器,虽然电路形式上有所不同,但完成的控制功能却是一样的。
整机电路(见图2-18)采用两片数字集成电路MC14069(同型号电路有CD4069、74HC4069等,可以互相代换),每只IC内含6组反相器电路。完成对断相、过载、短路及漏电故障信号的检测与故障记忆处理。从保护器的控制端子1、2引入380V控制电源,1、3端子(内部为控制继电器KA1的常闭触点)连接主电路接触器的线圈;4、5端为漏电信号输入端子,5端子接大地,4端子接电动机外壳,当电动机绕组产生单相对地短路故障时,电动机外壳带电,其漏电信号输入保护器,实施漏电停机保护。此功能不用时,将4、5端子短接或空置皆可。保护器电路本身无电动机起动、停止控制功能,但控制1、2端子进行保护器的控制电源的通、断,可完成对电动机的起停控制。在故障保护动作发生后,保护器可完成对电动机的故障停机控制,并有故障记忆功能,由故障指示灯显示电动机的故障停机原因。
【断相故障检测电路】 仅对断相故障进行检测,对三相电流不平衡无检测。保护器上电,电动机同时起动运行,LH1~LH3产生感应电流信号,经整流滤波和电压峰值限制,输入N1~N3三路反相器电路。电动机正常运行时,N1~N3三路反相器电路的输入端都为高电平,输出为地电压。有断相故障发生时,如B相电源断相,电流互感器LH2的感应电流信号为0,反相器N2输出状态翻转,二极管D8正向导通,将断相故障信号输入故障信号记忆电路,故障指示灯点亮,晶体管Q1得到基极正向偏压而导通,继电器KA1得电动作,主电路接触器线圈失电,电动机停止。
反相器N4及外围元件组成故障信号记忆电路,9脚输入断相故障信号后,经两极电路反相输出,输出端变为高电平,经R1、D10将输出高电平信号反馈回电路输入端,使电动机停止,电流信号消失后,电路仍能维持故障指示和故障锁定状态。
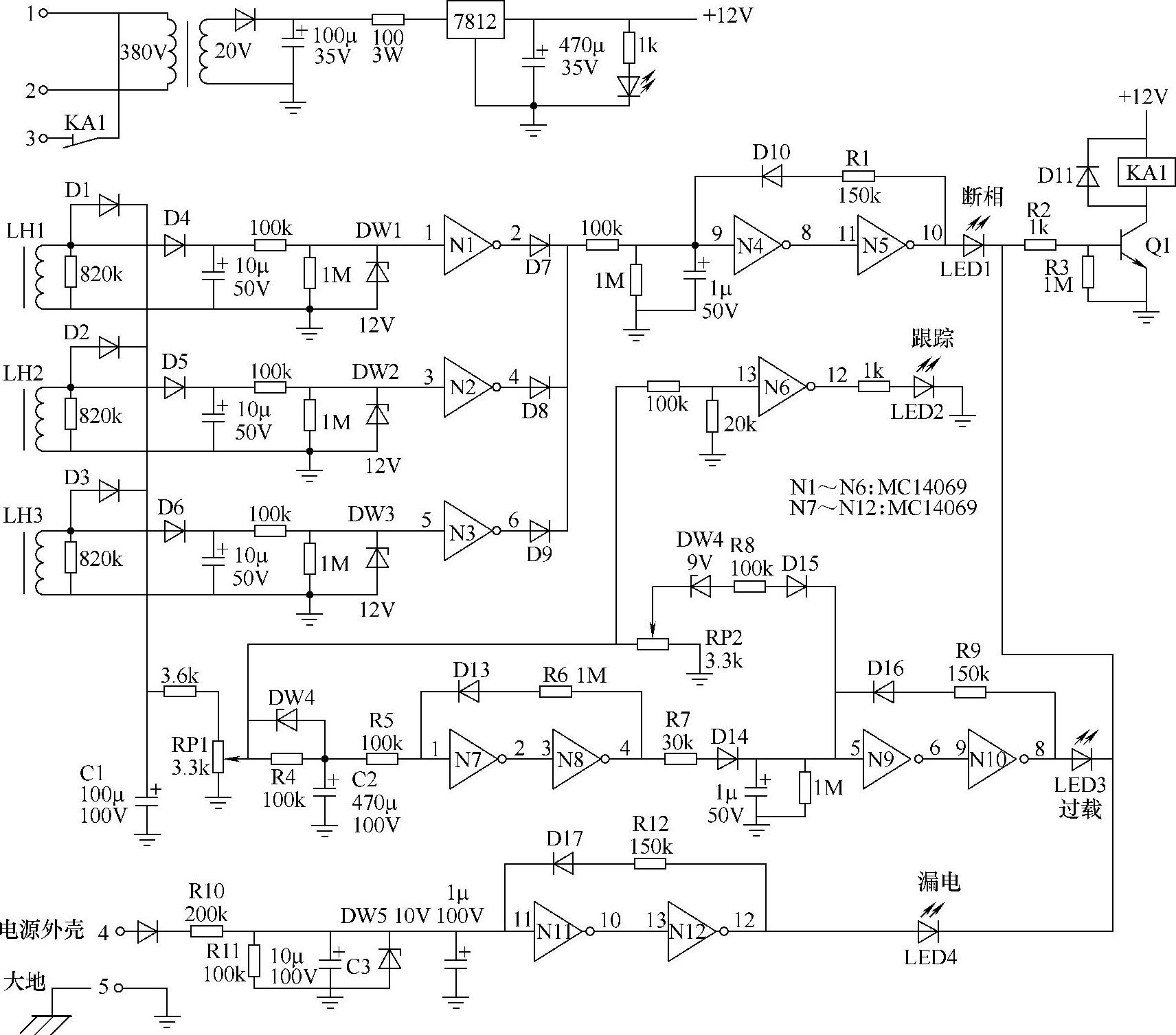
图2-18 SJDB-5型数字式电动机综合保护器
【过载故障检测电路】RP1、DW4、反相器N7、N8等元器件组成过载故障检测电路。经D1、D2、D3、C1整流滤波后的三相混合电流信号,经RP1对应调整后由中心臂输出至过载故障检测电路。过载保护电路对电流信号的检测,并不区别是哪一相发生了过载故障,只着眼于最高电流幅度信号,在输入信号幅度超过“基准值”时并经一定的延时后,保护电路输出故障信号,这是电流(过载)检测电路的一个特点。R4、C2构成反时限过载信号处理,以避过正常起动电流并根据输入电流信号大小使故障信号反时限延时生效,DW4并联于R4两端,提供短路故障发生的“速断保护信号”。那么电容C2上的故障电压上升至几伏才高过“基准值”,使反相器N7、N8输出状态变化送出故障信号呢?图2-16电路中,基准值是由R14、R15对+12V电压分压取得,与输入信号进行比较,产生故障信号输出的。本例电路的“基准值”又是如何形成的呢?
回答以上问题之前,需对作为数字电路的反相器的电气特性做一个了解。图2-19是反相器与电压迟滞比较器的电路比较,两者的电路形式悬殊,但工作特性是一样的,完成同样的任务,从数字电路的角度来说,称为反相器(或施密特触发器)电路,从模拟电路的角度来说,称为电压迟滞比较器电路。
先看图2-19中上方右侧的迟滞比较器电路。假定没有R3、D1的正反馈支路,运算放大器处于开环状态,N2放大器的同相端电压为电阻R1、R2对+10V电压分压得到1V(静态偏置)电压,则6脚反相端输入信号电路高于1V时,N2输出为高电平,低于1V时,N2输出低电平,输出状态的转换取决于1V这个基准电压点。这种电路的缺点是当反相端输入信号ui在1V左右有轻微波动时,会造成输出状态的不稳定。
加入R3、D1正反馈支路后,电路的输出稳定性有了极大改善。N2的同相端电压静态时为1V,在输入信号ui低于1V时,N2输出电压uo为高电平,适当选取R3的阻值,正反馈作用使N2同相端电压上升为8V,此时N2因正反馈作用一直维持高电平输出状态,直到输入ui信号高于8V时,输出变为低电平;此后,当输入信号ui一直降落于1V以下时,N2的输出状态才又翻转到低电平输出。(https://www.xing528.com)
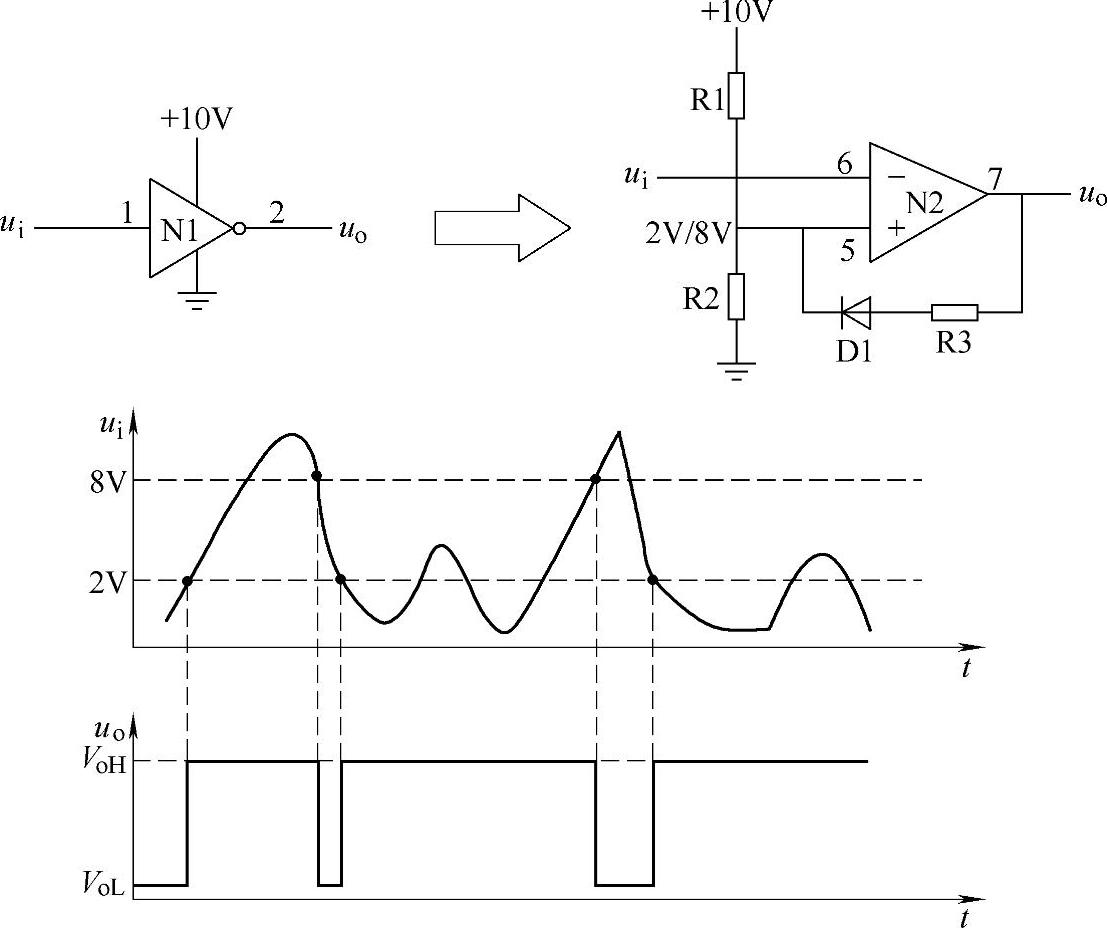
图2-19 反相器与电压迟滞比较器的电路比较
电路状态的翻转取决于输入信号的两个电平值,小于1V和大于8V,在1.1~7.9V的输入信号范围内,电路具有一个稳定的输出状态,由开环放大时的“电压点”输入动作,变为了引入正反馈支路后的“电压段”输入动作。在输入信号从低电平上升和从高电平下降的两个过程中,使电路状态发生翻转的输入电平值不同,这一特性称为滞回特性,或回差特性。迟滞比较器可用于对输入电压整形,用于控制电路时,可提高输出稳定性。
图2-19中上方左侧的反相器电路,与右侧电路的工作特性其实是一样的。10V供电电源情况下,当输入信号为低于供电电压的20%左右时,即输入ui信号为2V以下时,认为输入为低电平信号,N2输出为高电平状态;当输入信号高于电源电压的80%时,即输入信号为8V左右时,认为输出为高电平信号,N2输出变为低电平,其输入与输出之间具有迟滞特性。
再结合图2-18,对过载故障检测电路,可知反相器N7输入端1脚输入的电流检测信号是与一个“隐藏的基准值”(约为12V×80%=9.6V)相比较,当过载故障发生时,输入电流信号经延时达到9.6V以上时,N7、N8反相器输出状态翻转,输出过载故障信号,并使电路处于故障锁定状态中。
【短路故障检测电路】 运行电流信号还经电位器RP2的中心臂取出,当短路故障发生时,稳压二极管DW4击穿,将短路信号无延时输入N9反相器的5脚,后续电路实施停机保护动作。
N6反相器为运行电流跟踪指示电路,当运行电流小于故障动作电流,电动机处于正常运行时,N6反相端13脚输入信号小于9.6V,跟踪指示灯LED2正常点亮。
【单相地短路——漏电故障检测电路】 电动机得电后,发生单相对地短路故障时,电动机外壳漏电电压输入保护器端子4、5,经整流滤波、分压和稳压二极管保护电路后,输入由反相器N11、N12组成和漏电检测电路(和后续故障信号闭锁电路)。当电动机外壳的漏电电压达到20V以上时,保护电路动作,电动机停止运转。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。