



JD6型全电子式多功能电动机保护器的整机电路如图2-11所示,电路结构与HBHQ-0-1型电动机断相过载保护器非常相近,但工作方式稍有区别,而且工作性能有所提升。
【过载保护电路】 由电流互感器LH4、U1的第一组时基电路所组成。在Vc控制端3脚外加一只稳压二极管,将控制端电压稳压于2/3Vcc电源电压以下,提高了过载保护的动作精度。图2-10的过载保护电路,过载信号电压是与2/3Vcc电源电压相比较,以产生信号输出,由于电源电压的变化(无稳压措施),使信号比较的基准点(2/3Vcc电源电压)有随机性变化,使过载保护动作阈值也会有相应变化,动作精度较低。图2-11电路,过载信号电压与D12负端的稳压基准电压相比较,则动作阈值的精度能得以保证。电路也以“振荡方式”输出过载保护信号。
【过载反时限控制电路、断相保护电路与末级停机信号输出电路】 断相保护电路和过载反时限控制电路因共用一个元件C2,而构成一个密不可分的整体。U1内部第2组时基电路组成停机信号输出电路。为保护动作流程分析的方便,故将这三部分电路放于一处进行分析。
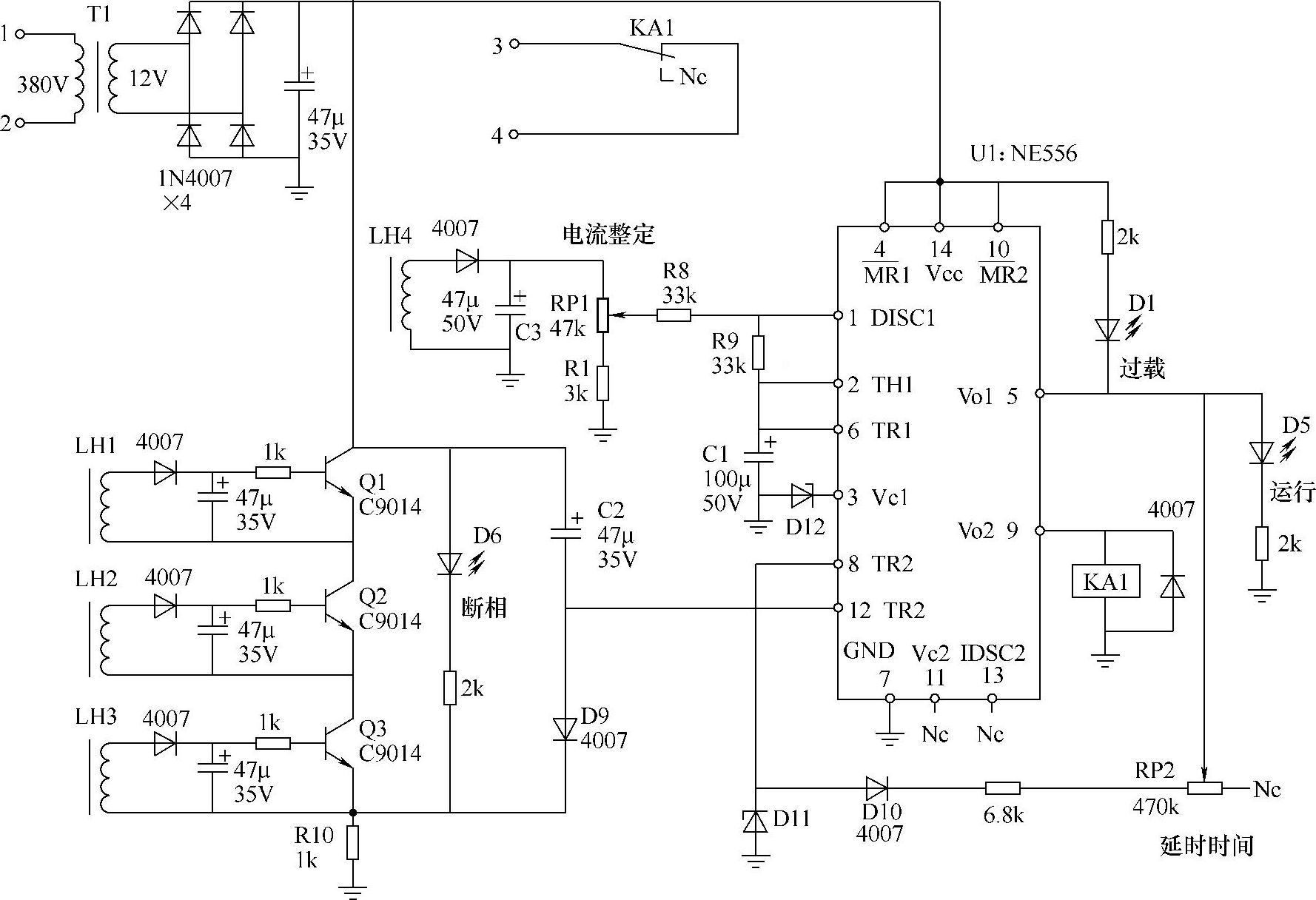
图2-11 JD6型全电子式多功能电动机保护器(https://www.xing528.com)
当电动机运行于正常状态,电流互感器LH1~LH3三相电流信号正常产生,晶体管Q1、Q2、Q3均处于饱和导通状态,电容C2的正、负极之间的电位差为0,U1内部第2组时基电路的触发端电压和门限电压输入端的电压约为电源电压Vcc(即8脚输入电压>1/3Vcc,12脚输入电压>2/3Vcc),U1内部满足复位条件,输出端9脚Vo=0,继电器KA1不动作。这里对第2组时基电路的应用方式,将触发输入脚2与门限电压控制脚12短接于一起,可等效为一个两端信号电路,若同时将1/3Vcc看作低电平,将2/3Vcc看做是高电平的话,电路的输入/输出信号逻辑关系构成反相关系,可看作是“反相器电路”。电路输出状态的翻转,是输入信号与1/3Vcc、2/3Vcc两个基准电压相比较的结果,电路的实际效果又相当于“迟滞电压比较器”了。
当断相故障出现时,Q1~Q3的串联电路被“切断”,由此形成经电源Vcc、C2、D9、R10、电源地的对C2的充电电流回路,充电的结果使C2负端电位向地电平变化,相当于为U1的8、12脚输入了一个负向脉冲,U1内部反相器电路受低电平信号触发产生翻转,输出端9脚变为高电平,继电器KA1得电动作,控制线路主接触器失电,电动机停机。
回头再看过载反时限控制电路的动作过程。当过载信号发生时,U1的5脚变为地电平电压,形成经电源Vcc、C2、D10、RP2、U1的5脚内部电路到电源地的,对C2的充电电流回路,此回路因串接电位器RP2的原因,时间常数较大,故能将电动机起动期间的过载信号避过去,对运行过程中产生的过载信号,则具有反时限保护特性。调整RP2的阻值,可改变过载延时动作时间。C2充电的结果,使C1负端也即U1的6、12脚逐渐降低到1/3Vcc电压值以下时,继电器KA1得电动作,电动机停止运行,实现了过载停机保护。
电路中的C2是个关键元件,具有“双重身份”,断相与过载信号发生时,都依赖其产生停机保护触发信号。在很多电路中,我们往往只看出某元件的“第一身份”,不能看出元件的“隐蔽身份”,对电路原理的分析也因此“卡壳”,这是需要注意的地方。D9、D10为隔离二极管,以避免断相、过载信号发生时C2的两个充、放电回路产生互相影响。当过载信号发生时形成C2的充电回路时,D9处于反偏截止状态,隔断Q3发射极高电位对C2负端电压的影响;当断相信号发生(过载信号尚未发生)时,D10反偏截止,隔断了U1的5脚高电位对C2负端电压的影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。