



1.电梯门机构原理
电梯的门系统主要由轿门、层门(也叫厅门)、开关门机构、门锁装置及安全保护装置等组成。下面仅对电梯的开关门机构作详细说明。
电梯的开关门机构按方式可分为手动和自动两种。目前生产的电梯大多为自动开关门机构。自动开关门机构又可分为栅栏式和封闭式两种。客梯上通常采用封闭式自动开关门机构,且以中分式自动门机构为主,如图9-7所示。
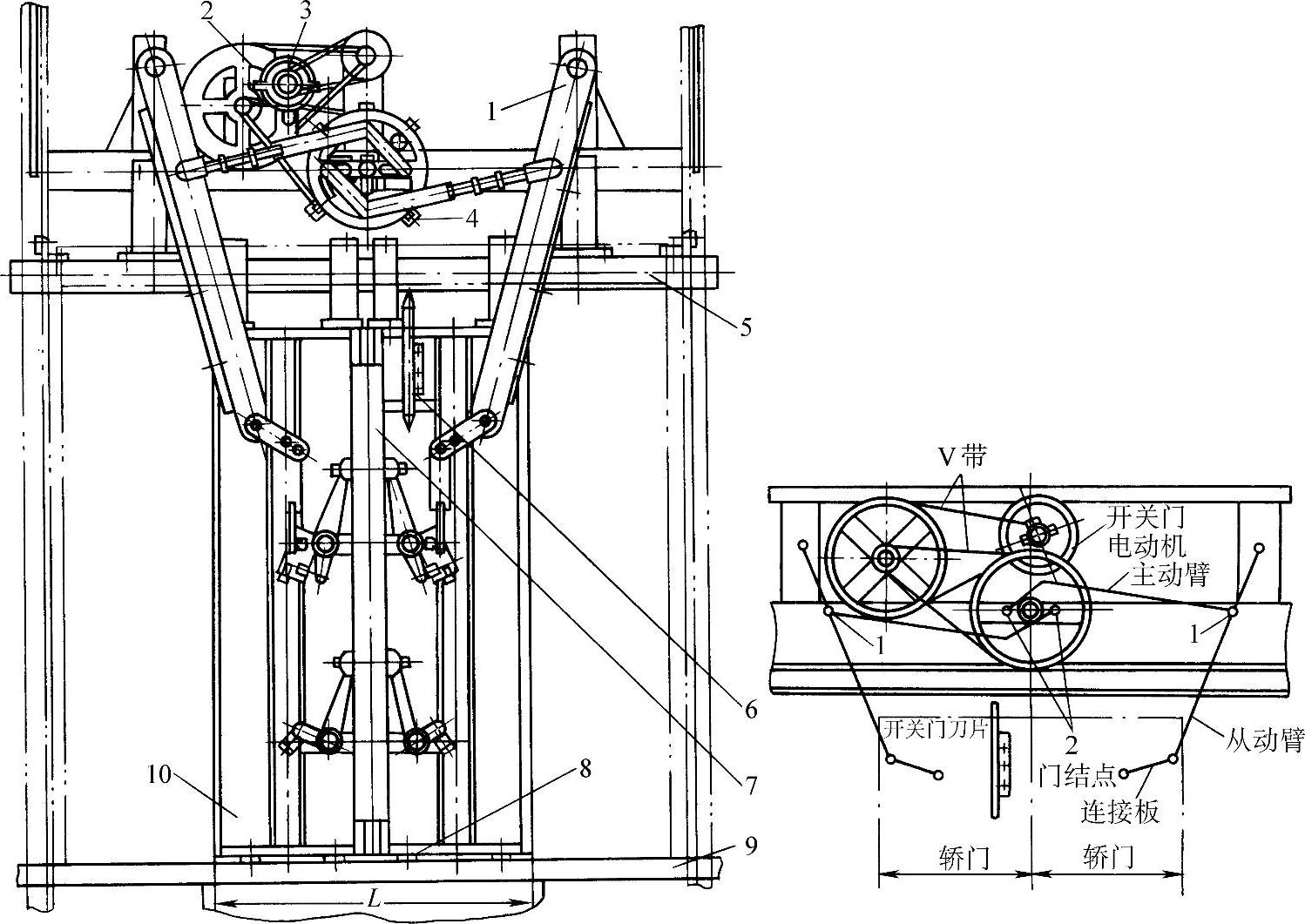
图9-7 中分式自动开关门机构
1—电联锁开关 2—锁壳 3—吊门导轨 4—复位弹簧 5—拉杆固定架 6—门刀 7—安全触板 8—门滑块 9—轿门踏板 10—轿门
自动开关门机构在开关门过程中速度是变化的,且关门的平均速度低于开门的平均速度。开关门速度变化的过程是:开门时低速起动运行→加速至全速运行→减速运行→停机→惯性运行至门全开;关门时全速起动运行→第一级减速运行→第二级减速运行→停机→惯性运行至门全闭。
门在开关过程中速度的变化是通过改变电动机电枢电压来实现的。其工作原理如图9-8所示。
图中TC为电源变压器;VD1~VD6组成桥式整流二极管,为门电动机提供110V直流电压;W1为直流电动机的励磁绕组;W2为主绕组;R2、R3为门电动机的分流电阻;KA4为关门继电器,KA6为开门继电器。
当关门继电器KA4的1、2触点,3、4触点,5、6触点接通后,电梯门电动机的励磁绕组和电枢绕组得电,电动机快速转动,开始关门;当关门到约2/3位置时,关门行程开关SA2闭合,R3部分电阻被短接,对电动机电枢的分流作用使电梯门作第一级减速;当门关至约150mm时,关门行程开关SA3闭合,R3大部分电阻被短接,分流作用进一步加大,门电动机作第二级减速;门完全闭合后断电。
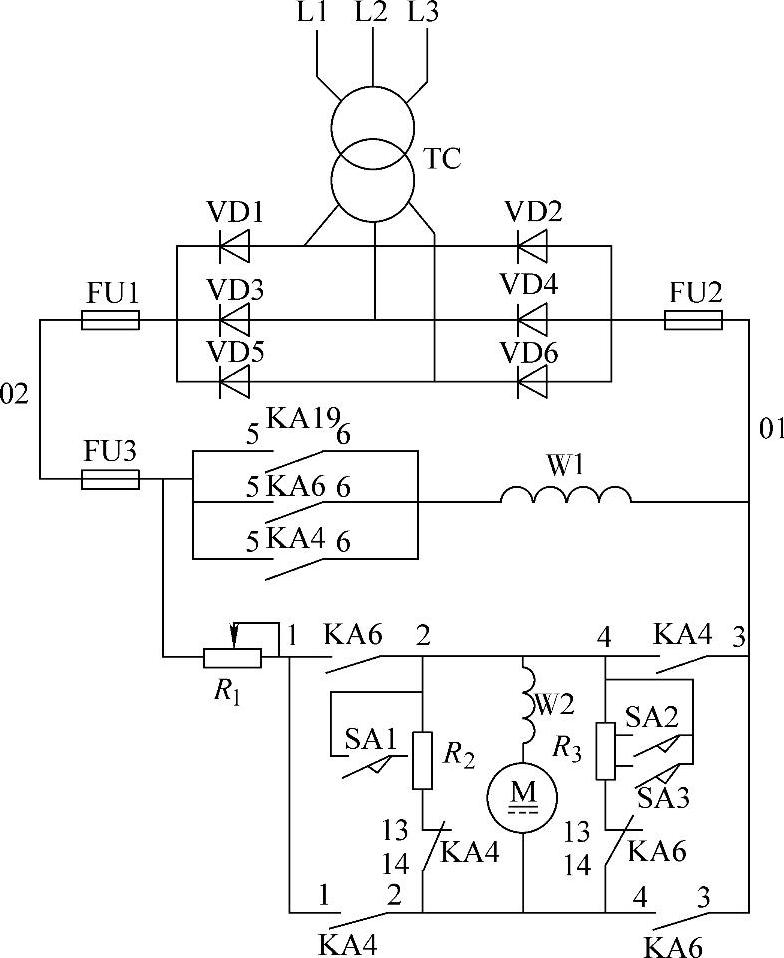
图9-8 自动开关门机构的工作原理
当开门继电器KA6的1、2触点,3、4触点,5、6触点接通后,电梯门电动机的励磁绕组和电枢绕组得电,但电枢电压极性相反,电动机反向快速转动,开始开门;当开门到约1/2位置时,开门行程开关SA1闭合,R2部分电阻被短接,对电动机电枢的分流作用使电梯减速开门;门完全打开后断电。
2.层楼位置信号控制原理(https://www.xing528.com)
(1)层楼位置指示 乘客电梯通常在各停靠站的厅门上方和轿箱内的轿门上方设置指示灯箱,以灯光、数码管或发光二极管等显示电梯轿箱所在楼层,并以箭头灯显示电梯的运行方向。楼层位置指示灯箱如图9-9所示,当电梯上行时,向上箭头显亮,数字从小到大依次显亮;下行时,向下箭头显亮,数字从大到小依次显亮。
(2)层楼位置信号控制原理 通常在井道内相应位置,即每层停层位置安装有一个层楼永磁继电器。当电梯运行到某层时,轿箱顶上的隔磁板短路相应的层楼永磁继电器,从而接通相应的层楼控制继电器,给出位置信号。
3.曳引机减速箱
对于运行速度达到2.0m/s的高速电梯,一般采用无齿轮(无机械减速器)曳引机,这种曳引机的曳引轮直接固定在电动机轴上,结构简单,但需较大的制动转矩。而对于运行速度在2.0m/s以下的各种货梯、客梯,通常采用蜗杆减速器。蜗杆减速器具有运行噪声低、制动转矩小、平稳性好等特点。根据蜗杆与蜗轮的相对位置不同,可分为蜗杆上置式减速器和蜗杆下置式减速器两种,如图9-10所示。
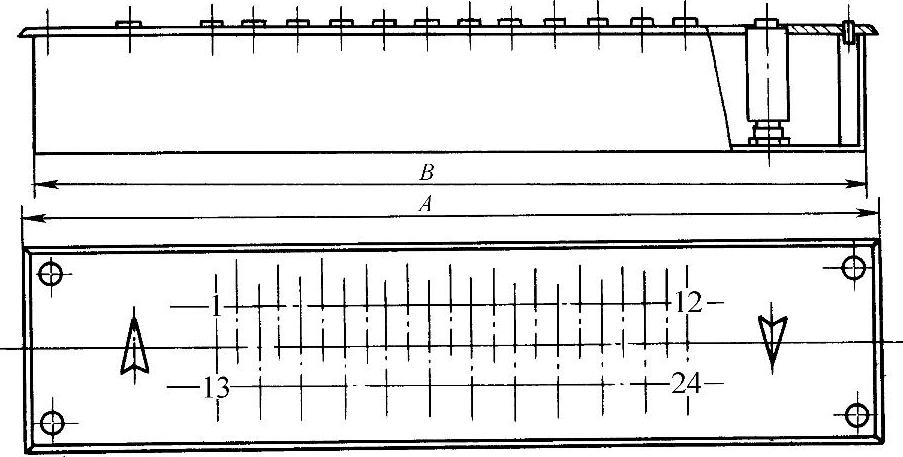
图9-9 楼层位置指示灯箱
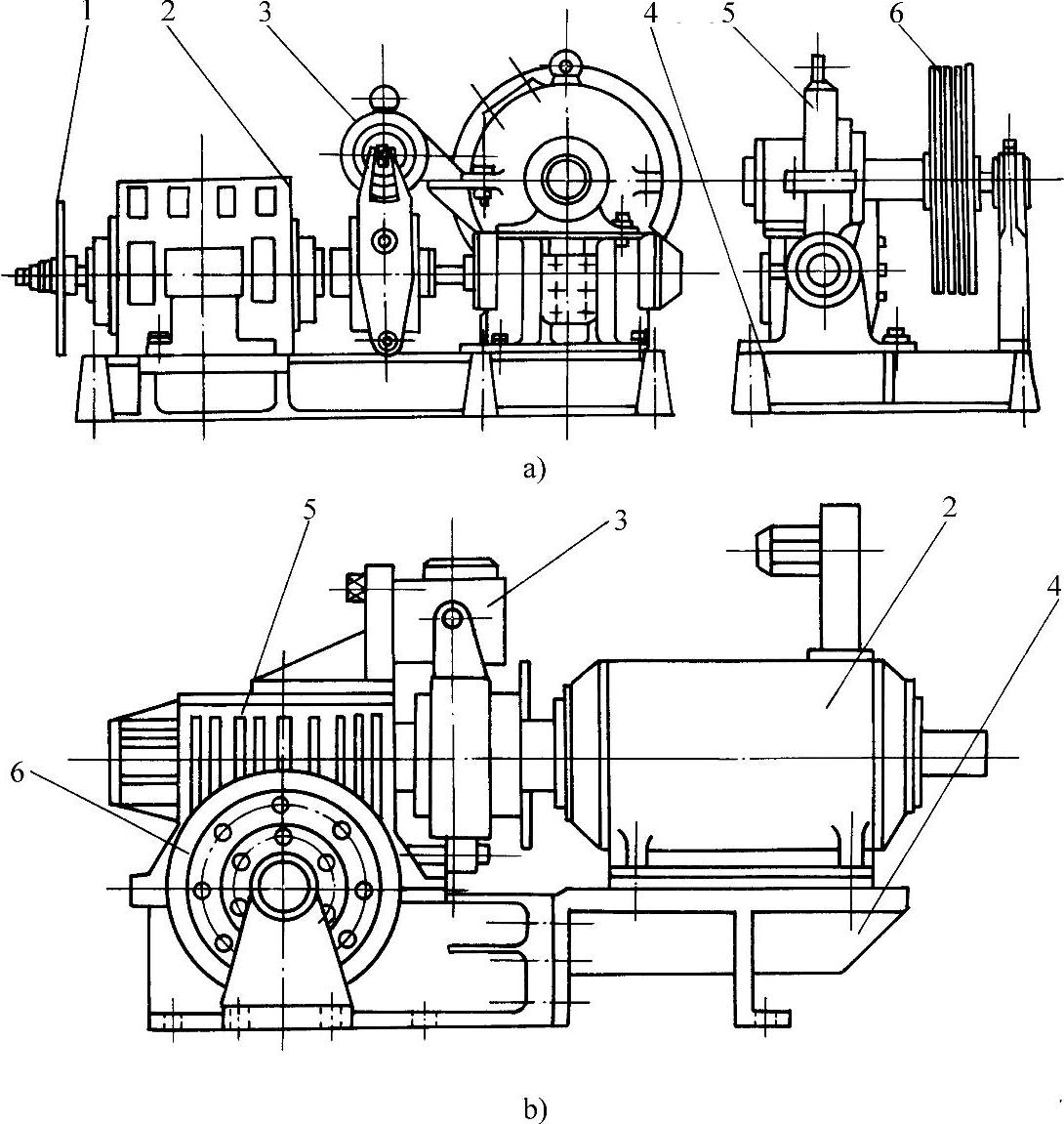
图9-10 蜗杆减速器类型与结构
a)蜗杆下置式减速器 b)蜗杆上置式减速器
1—惯性轮 2—曳引电动机 3—制动器 4—曳引机底盘 5—蜗杆减速器 6—曳引轮
蜗杆轴及蜗轮轴的轴向游隙必须在规定值以内,见表9-1。若超过规定值,则极易引起电梯在起动、换速、停止过程中的抖动和冲击噪声等故障现象,可根据一故障特点来对蜗杆轴及蜗轮轴的轴向游隙进行调整和检修。
表9-1 蜗杆轴及蜗轮轴的轴向游隙规定值 (单位:mm)

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。