



也称为“起保停”设计法。对于比较复杂的逻辑控制,用经验设计法就不合适,适合用功能图设计法。功能图设计法无疑是应用最为广泛的设计方法。功能图就是顺序功能图,功能图设计法就是先根据系统的控制要求画出功能图,再根据功能图画梯形图,梯形图可以是基本指令梯形图,也可以是顺控指令梯形图和功能指令梯形图。因此,设计功能图是整个设计过程的关键,也是难点。
(1)起保停设计方法的基本步骤
①绘制出顺序功能图。要使用“起保停”设计方法设计梯形图时,先要根据控制要求绘制出顺序功能图,其中顺序功能图的绘制在前面章节中已经详细讲解,在此不再重复。
②写出储存器位的布尔代数式。对应于顺序功能图中的每一个储存器位都可以写出如图5-25所示的布尔代数式。图中等号左边的Mi为第i个储存器位的状态,等号右边的Mi为第i个储存器位的常开触点,Xi为第i个工步所对应的转换条件,Mi-1为第i-1个储存器位的常开触点,Mi+1为第i+1个储存器位的常闭触点。
③写出执行元件的逻辑函数式。执行元件为顺序功能图中的储存器位所对应的动作。一个步通常对应一个动作,输出和对应步的储存器位的线圈并联或者在输出线圈前串联一个对应步的储存器位的常开触点。当功能图中有多个步对应同一动作时,其输出可用这几个步对应的储存器位的“或”来表示,如图5-26所示。

图5-25 存储器位的布尔代数式

图5-26 多个步对应同一动作时的梯形图
④设计梯形图。在完成前3步的基础上,可以顺利设计出梯形图。
(2)利用基本指令编写梯形图程序
用基本指令编写梯形图程序,是最容易被想到的方法,不需要了解较多的指令。采用这种方法编写程序的过程是,先根据控制要求设计正确的功能图,再根据功能图写出正确的布尔表达式,最后根据布尔表达式设计基本指令梯形图。以下用一个例子讲解利用基本指令编写梯形图指令的方法。
【例5-2】用一个PLC控制4盏灯,其接线图如图5-27所示,4盏灯的亮灭逻辑描述如下:
①初始状态时所有的灯都不亮,此时按下SB1按钮,灯HL1亮;接着按下SB2按钮,灯HL2亮,HL1灭,按下SB3按钮,灯HL3亮,HL2灭;2s后,灯HL3仍然亮,灯HL4以1Hz的频率闪烁,4s后,灯HL3和HL4熄灭,灯HL1亮,并如此循环。
②任何时候,按下SB4按钮,所有灯熄灭,并回到初始状态。
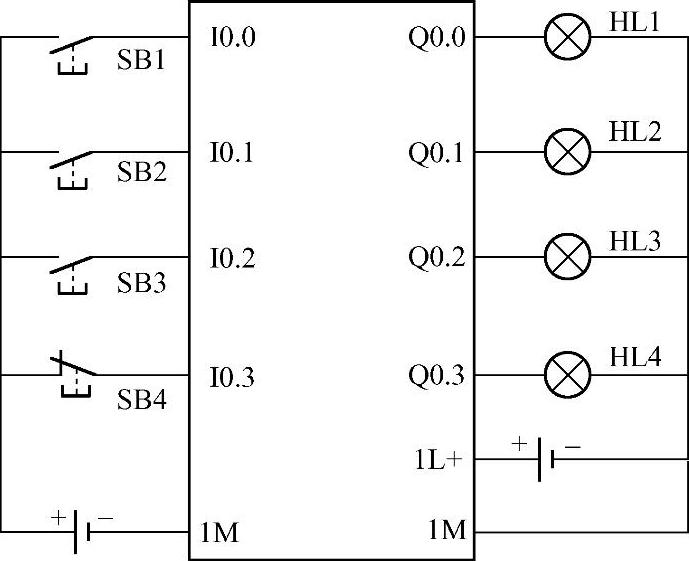
图5-27 接线图
请画出功能图和梯形图。
【解】
这个逻辑看起来比较复杂,如果不掌握规律,则很难设计出正确的梯形图,一般先根据题意画出功能图,再根据功能图写出布尔表达式,如图5-28所示。布尔表达式是有规律的,当前步的步名对应的寄存器(如M0.1)等于上一步的步名对应的寄存器(M0.0)与上一步的转换条件(I0.1)的乘积,再加上当前步的步名对应的寄存器(M0.1)与下一步的步名对应的寄存器非( )的乘积,其他的布尔表达式的写法类似,最后根据布尔表达式画出梯形图,如图5-29所示。在整个过程中,功能图是关键,也是难点,而根据功能图写出布尔表达式和画出梯形图则比较简单。
)的乘积,其他的布尔表达式的写法类似,最后根据布尔表达式画出梯形图,如图5-29所示。在整个过程中,功能图是关键,也是难点,而根据功能图写出布尔表达式和画出梯形图则比较简单。
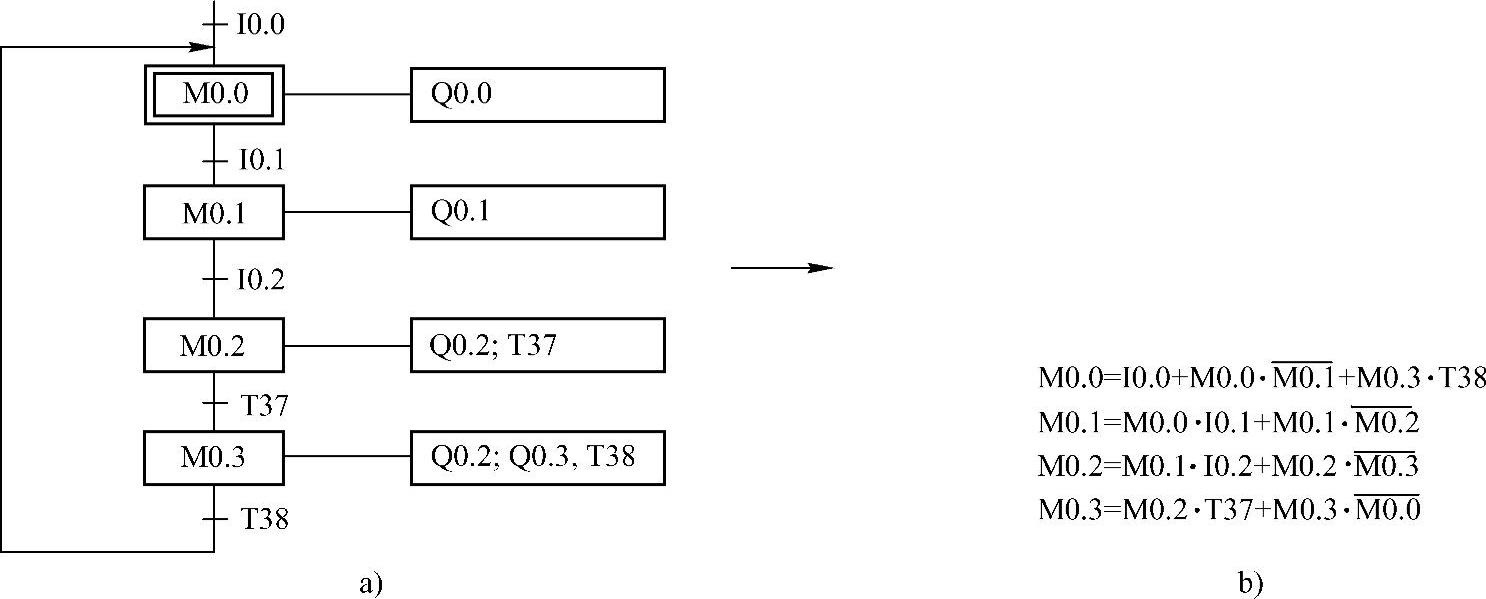
图5-28 功能图和布尔表达式对应关系图
a)功能图b)布尔表达式
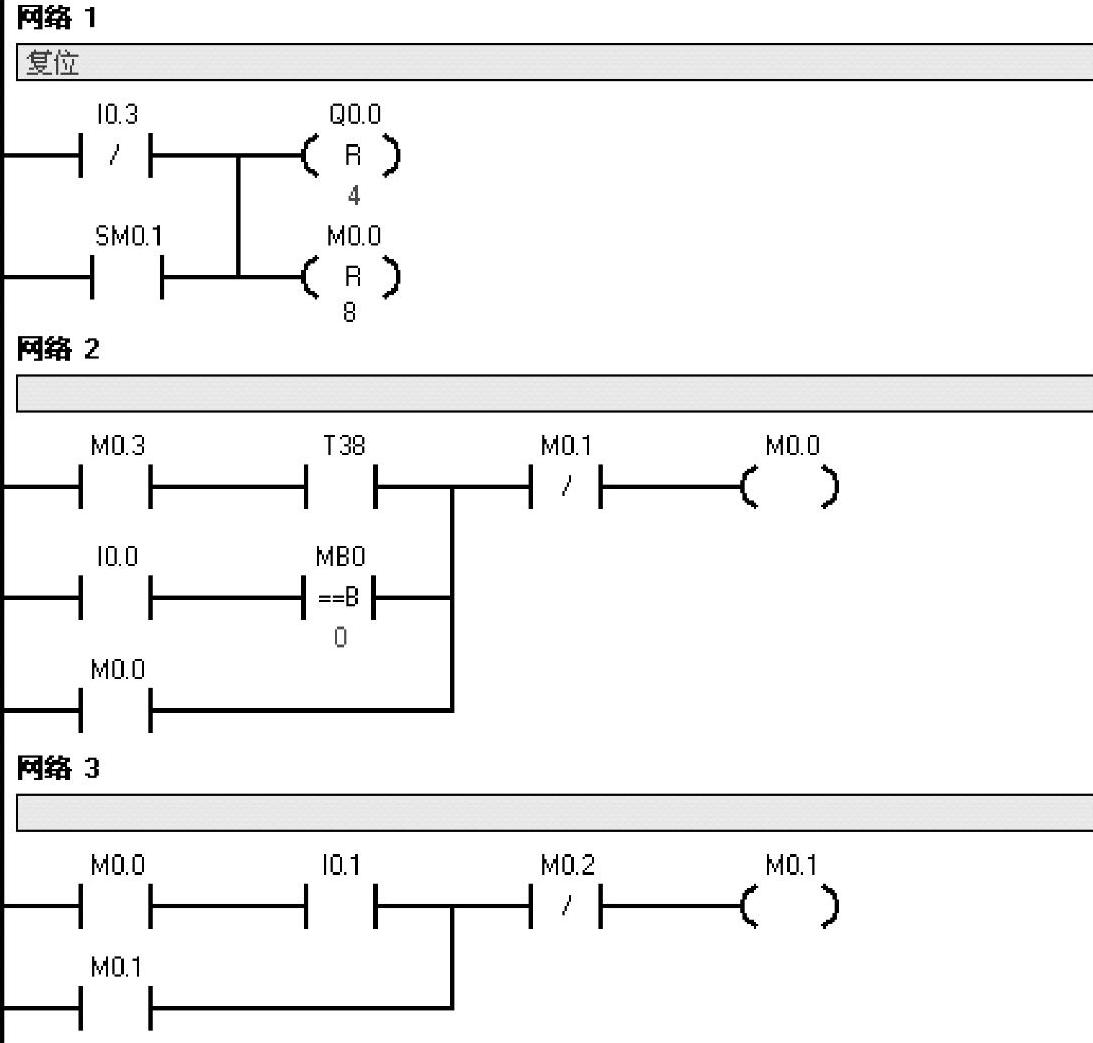
图5-29 梯形图
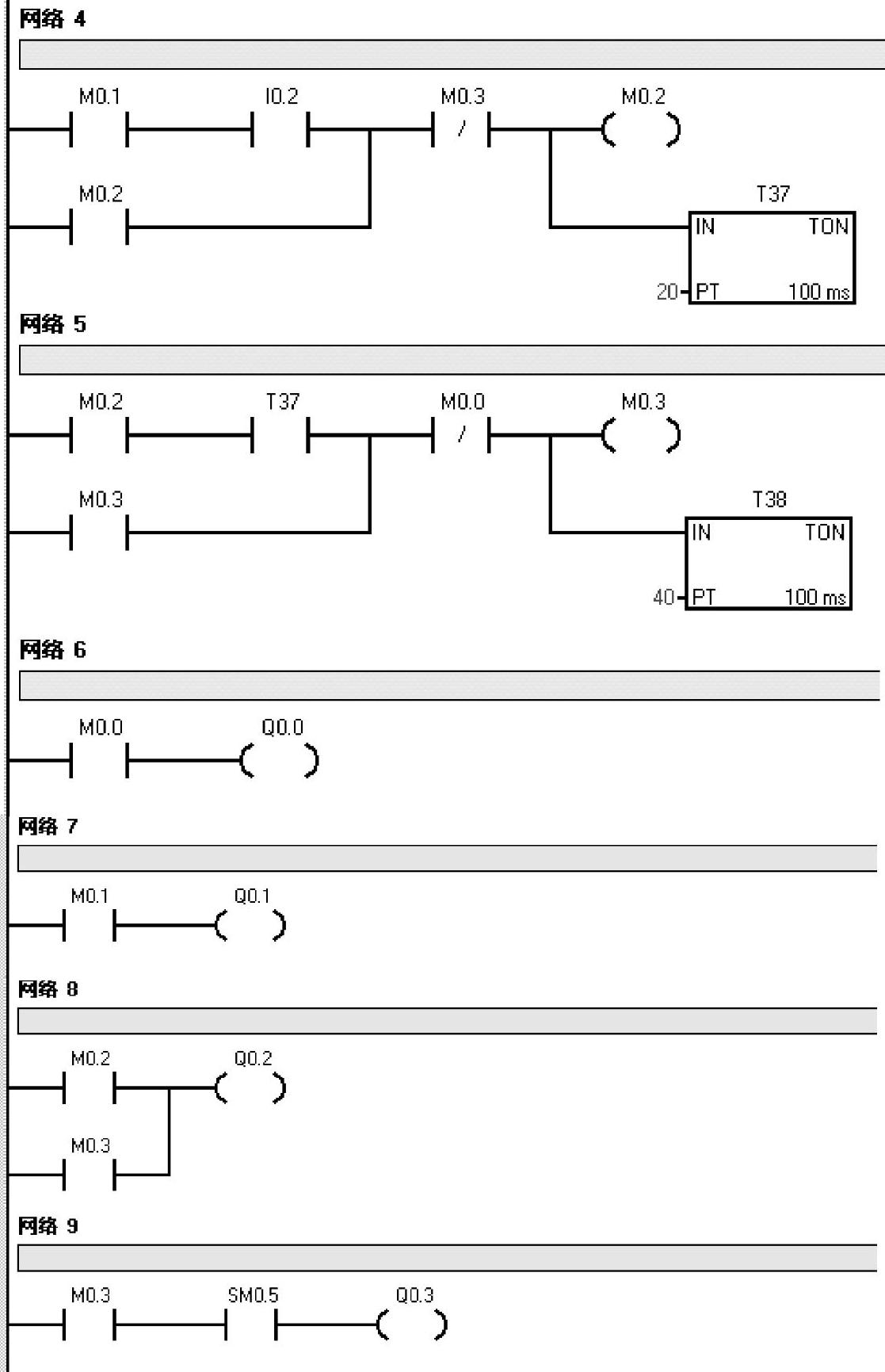
图5-29 梯形图(续)
【关键点】这个问题的解决方案中SB4是复位按钮,同时也起停止按钮的作用,因此,接线图上最好使用常闭触点。
图5-29梯形图的网络2中有一个MB0=0导通的条件是确保在非起始步,SB1按钮不起作用,也就是说除第一步外,在其他几步中按SB1按钮,都不会起作用。
【例5-3】步进电动机是一种将电脉冲信号转换为电动机旋转角度的执行机构。当步进驱动器接收到一个脉冲,就驱动步进电动机按照设定的方向旋转一个固定的角度(称为步距角)。因此步进电动机是按照固定的角度一步一步转动的。因此可以通过脉冲数量控制步进电动机的运行角度,并通过相应的装置,控制运动的过程。对于五相十拍步进电动机,其控制要求为:按下起停按钮,定子磁极A通电,1s后A、B同时通电;再过1s,B通电,同时A失电;再过1s,B、C同时通电……,以此类推,其通电过程如图5-30所示。

图5-30 通电过程图
【解】
根据题意很容易画出功能图,如图5-31所示。根据功能图编写梯形图程序如图5-32所示。
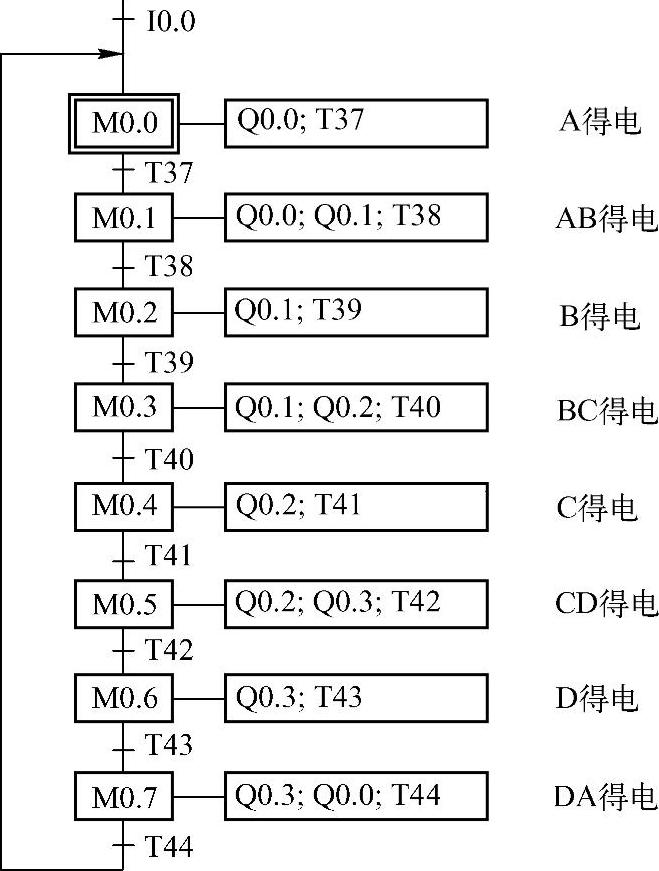
图5-31 功能图
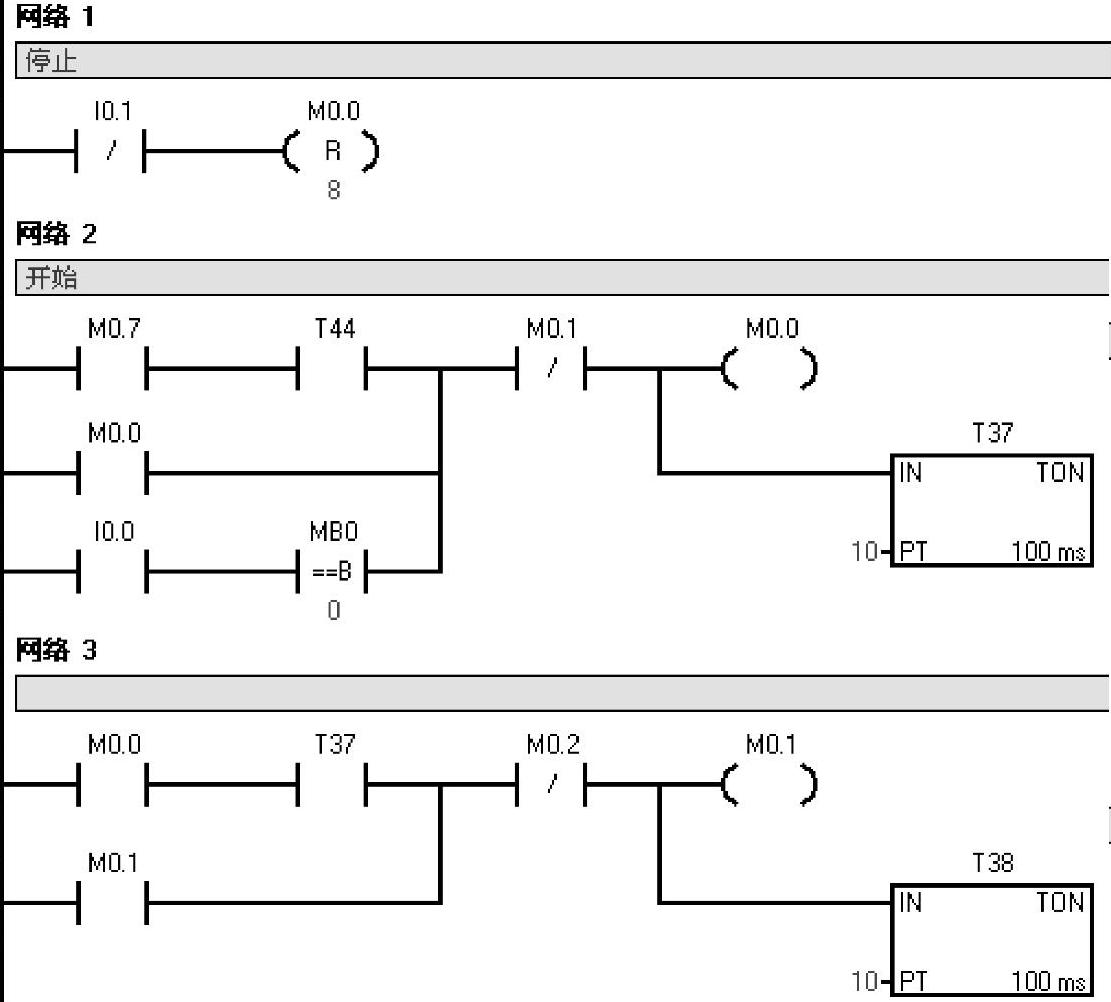
图5-32 梯形图
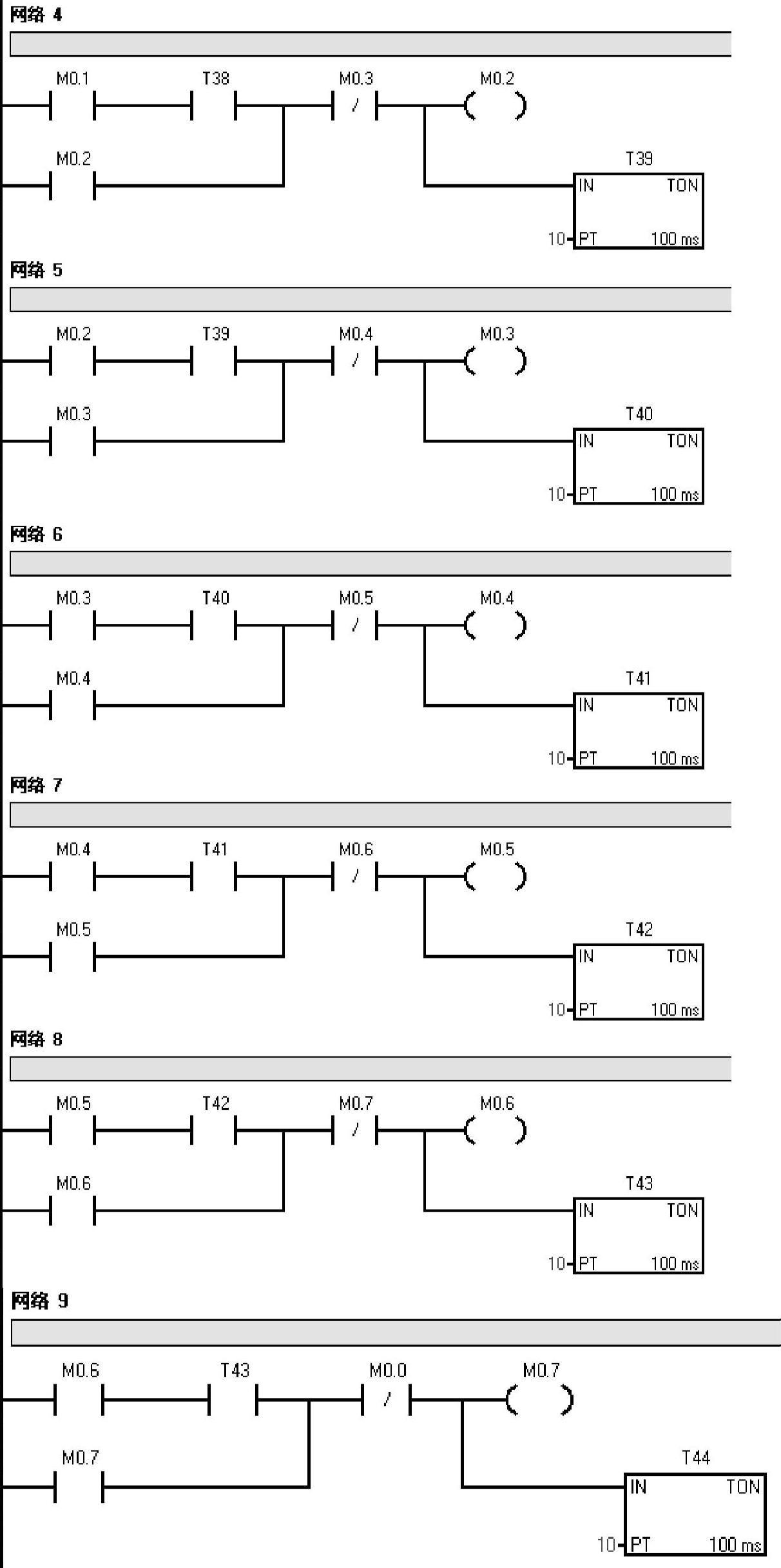
图5-32 梯形图(续)
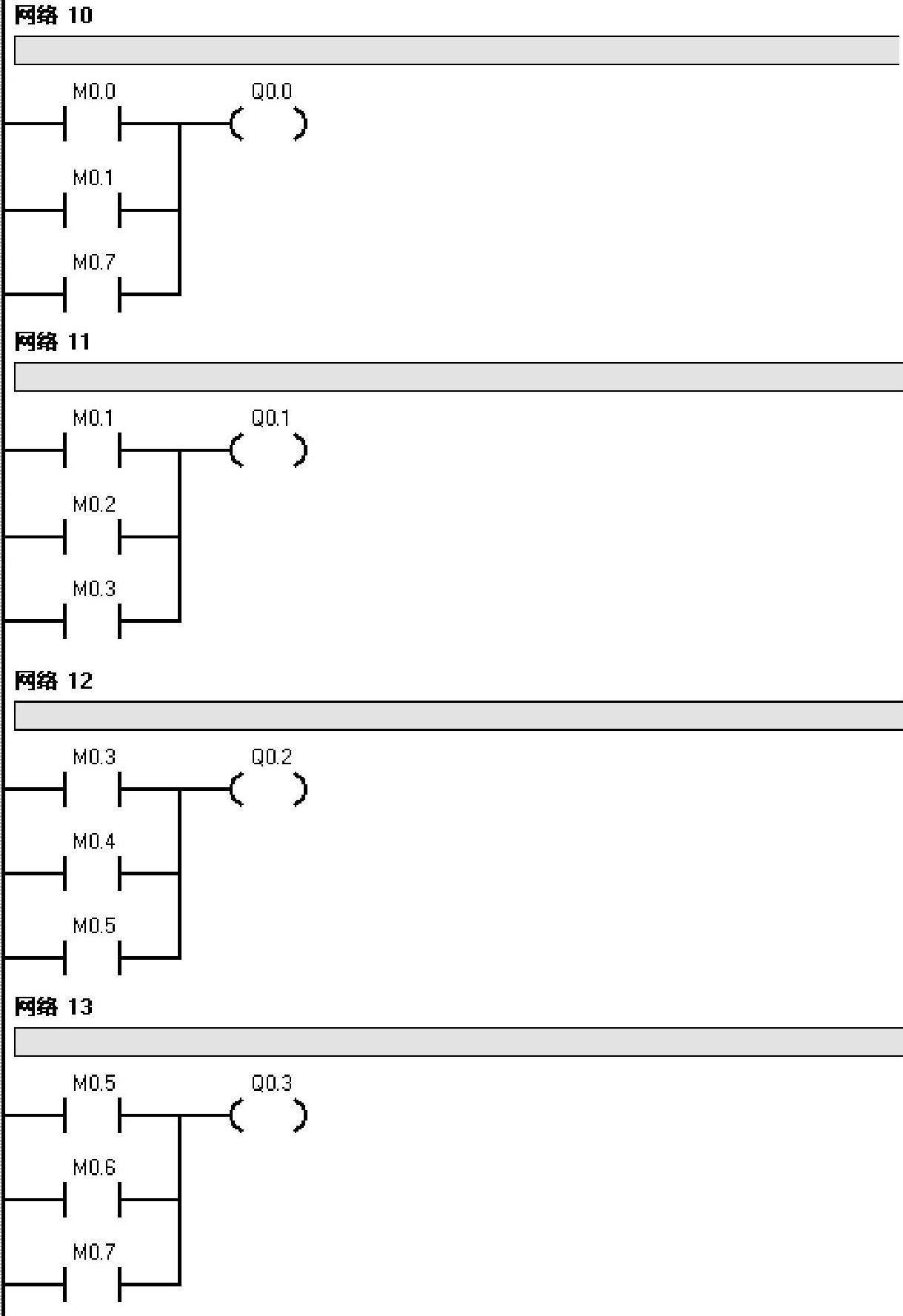
图5-32 梯形图(续)
(3)利用顺控指令编写逻辑控制程序
功能图和顺控指令梯形图有一一对应关系,利用顺控指令编写逻辑控制程序有固定的模式,顺控指令是专门为逻辑控制设计的指令,利用顺控指令编写逻辑控制程序是非常合适的。以下用一个例子讲解利用顺控指令编写逻辑控制程序。
【例5-4】用顺控指令编写例5-2的程序。
【解】
功能图如图5-33所示,程序如图5-34所示。
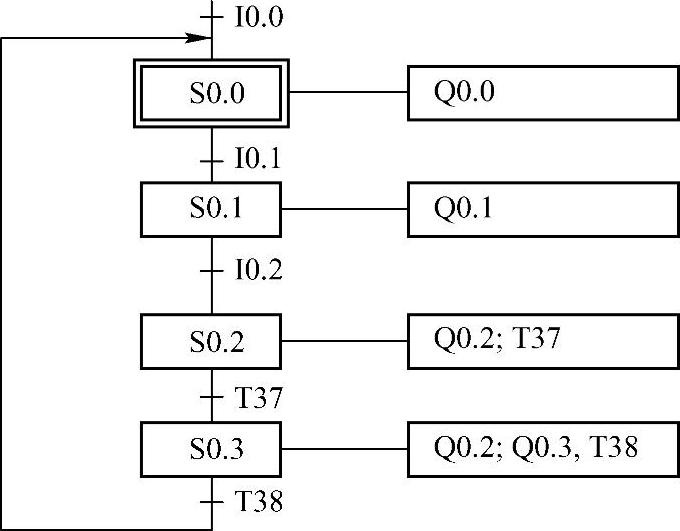
图5-33 功能图
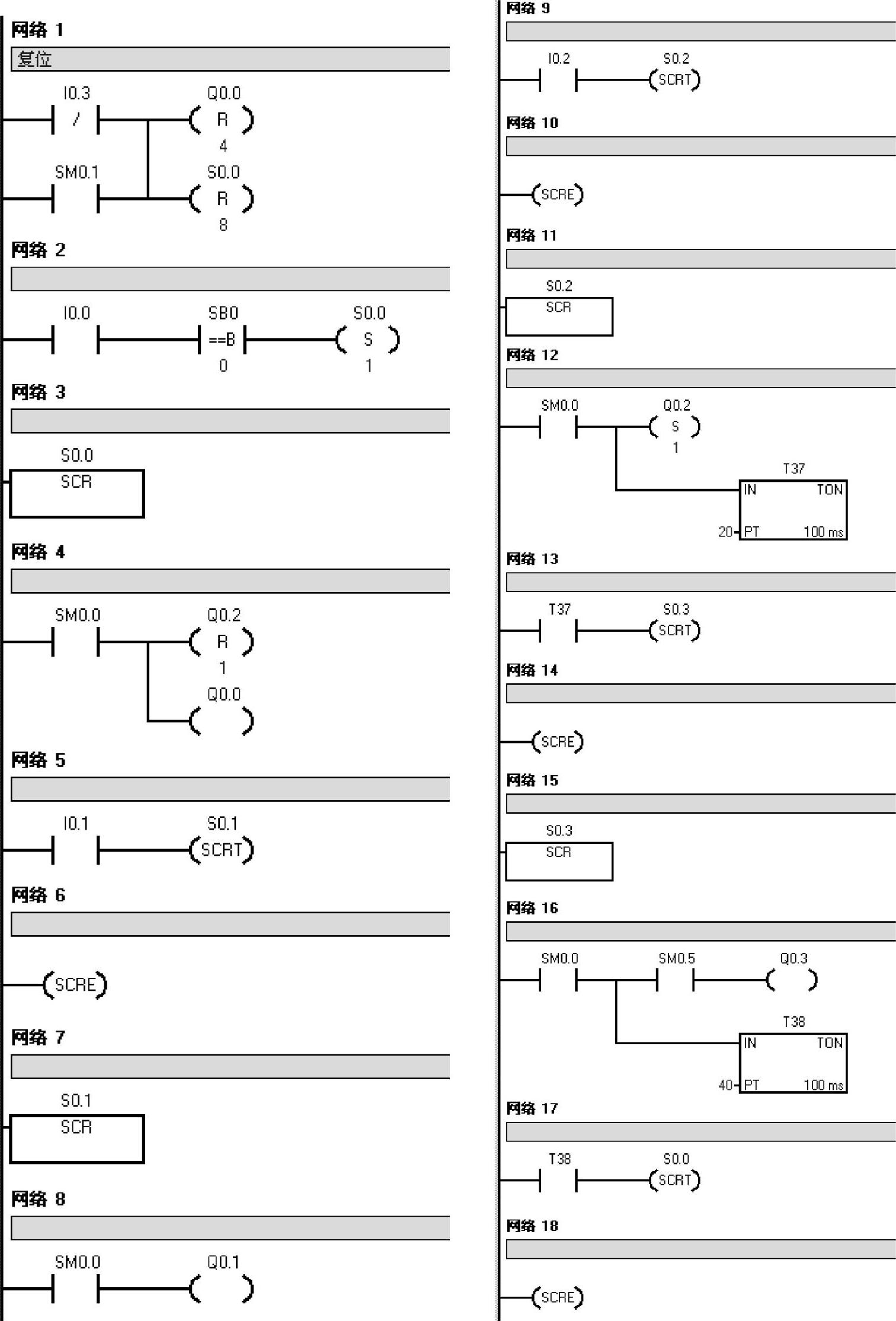
图5-34 程序
【例5-5】用顺控指令编写例5-3的程序。
【解】
功能图如图5-35所示,程序如图5-36所示。
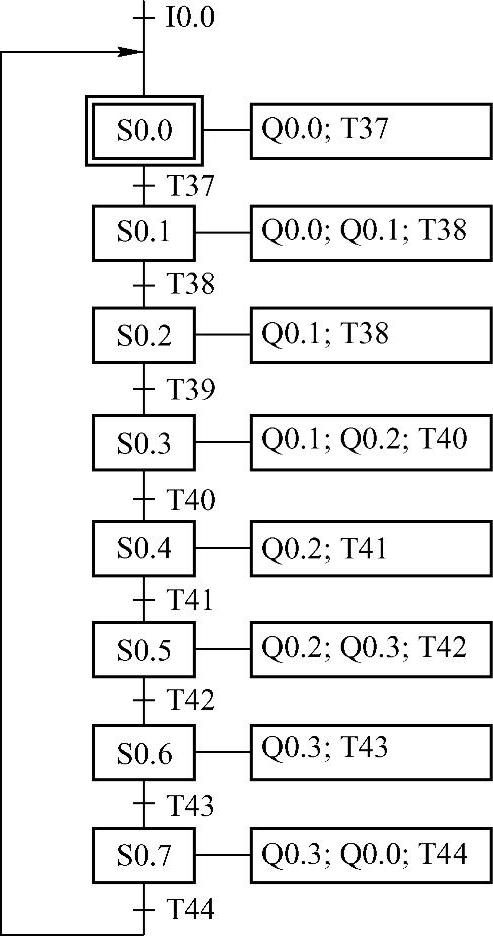
图5-35 功能图
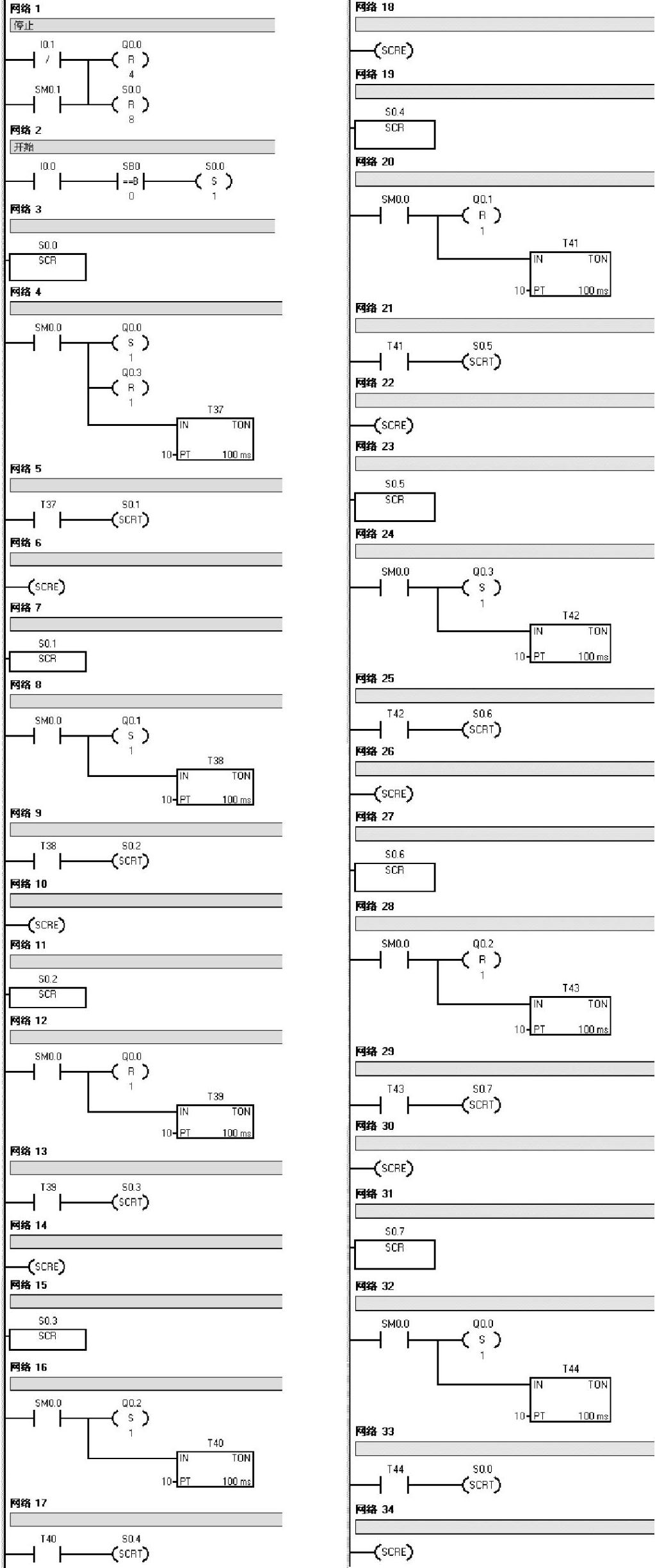
图5-36 梯形图(https://www.xing528.com)
(4)利用功能指令编写逻辑控制程序
西门子的功能指令有许多特殊的功能,其中功能指令中的移位指令和循环指令非常适合用于顺序控制,用这些指令编写程序简洁而且可读性强。以下用一个例子讲解利用功能指令编写逻辑控制程序。
【例5-6】用功能指令编写例5-2的程序。
【解】
梯形图如图5-37所示。
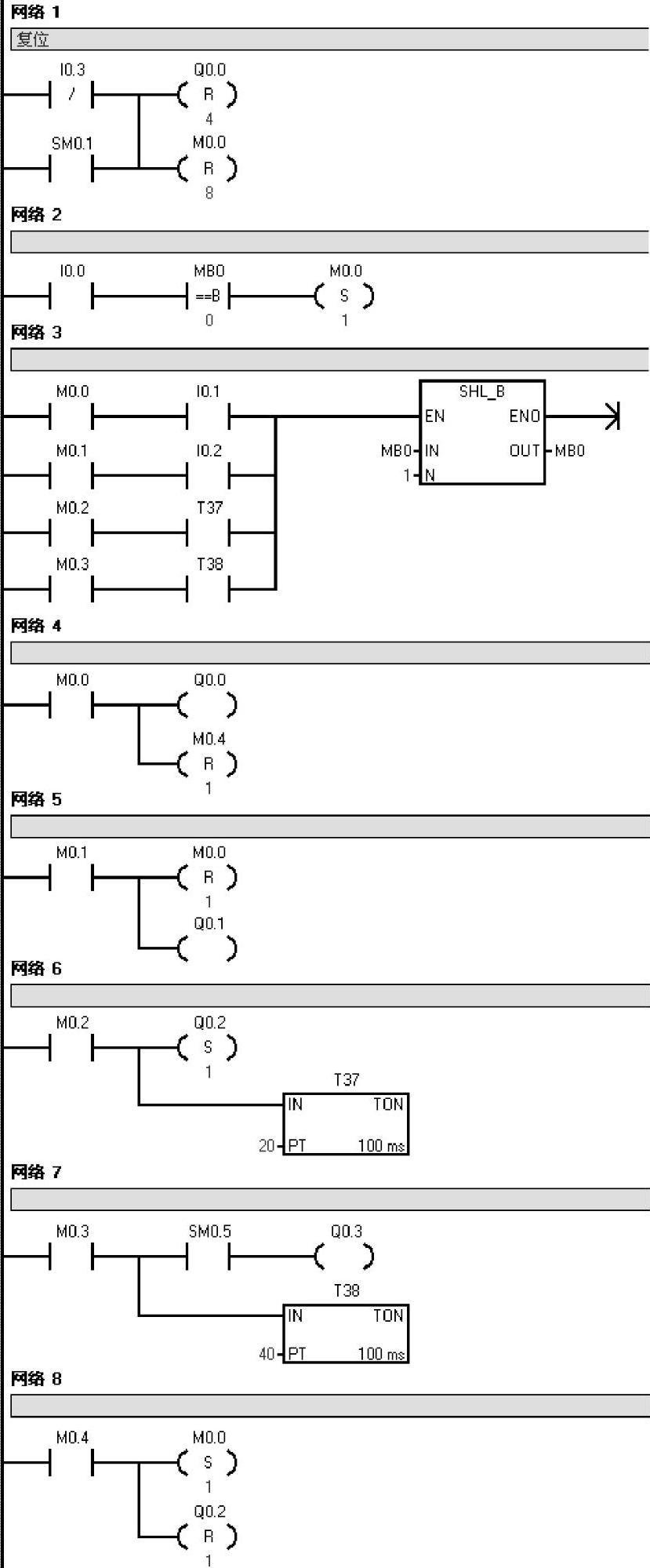
图5-37 梯形图
【例5-7】用功能指令编写例5-3的程序。
【解】
梯形图如图5-38所示。
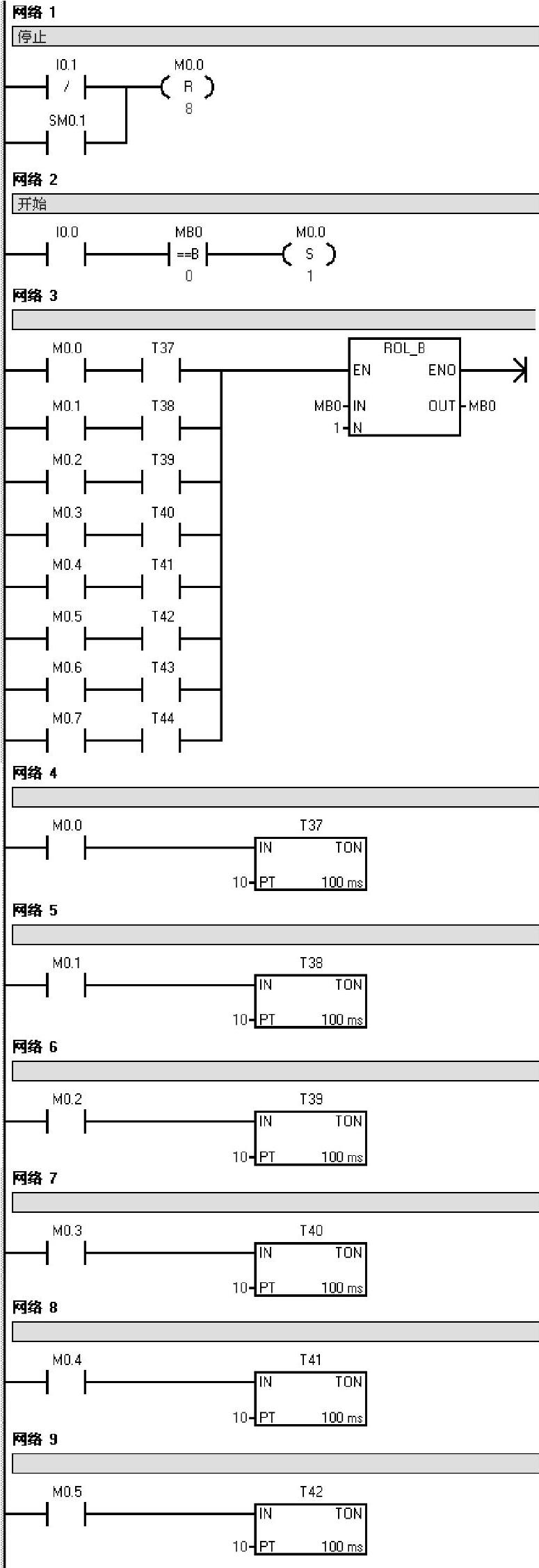
图5-38 梯形图
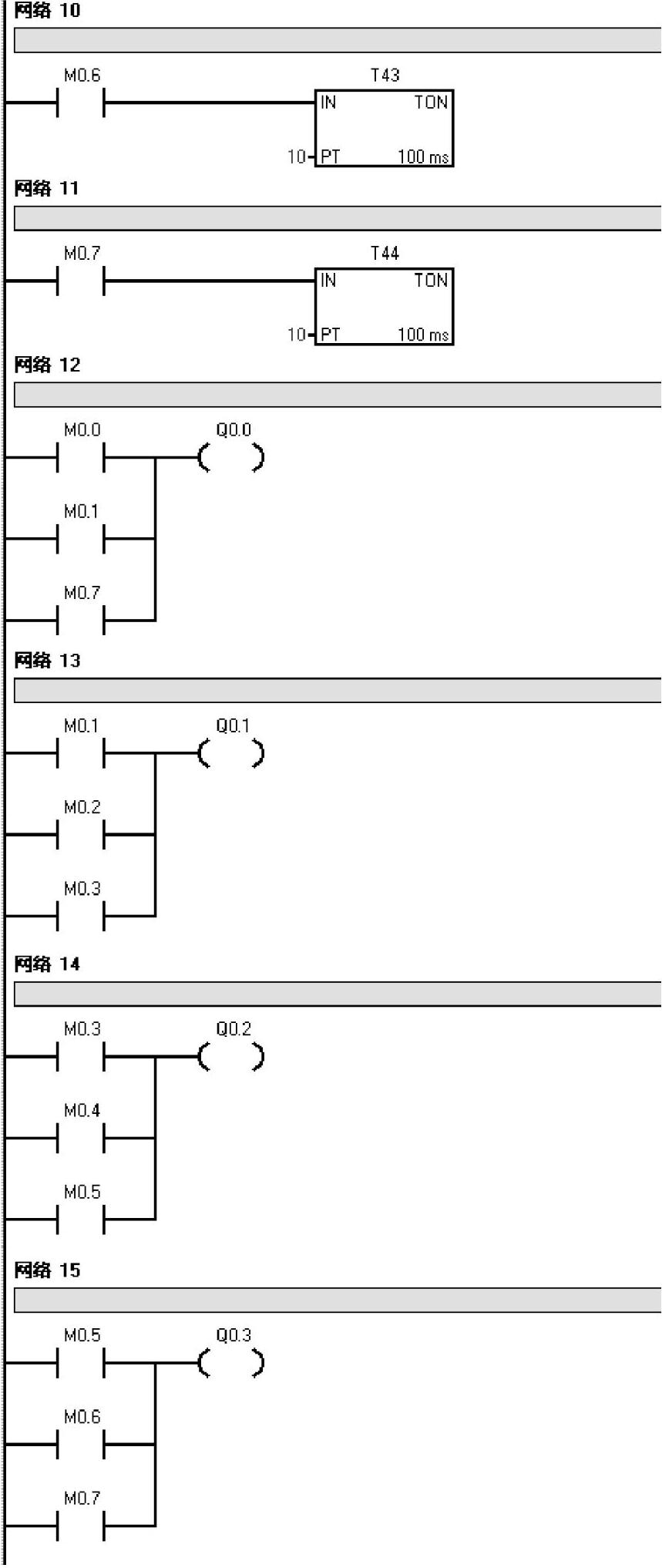
图5-38 梯形图(续)
(5)利用复位/置位指令编写逻辑控制程序
复位/置位指令是常用指令,用复位/置位指令编写程序简洁而且可读性强。以下用一个例子讲解利用复位/置位指令编写逻辑控制程序。
【例5-8】用复位和置位指令编写例5-2的程序。
【解】
梯形图如图5-39所示。
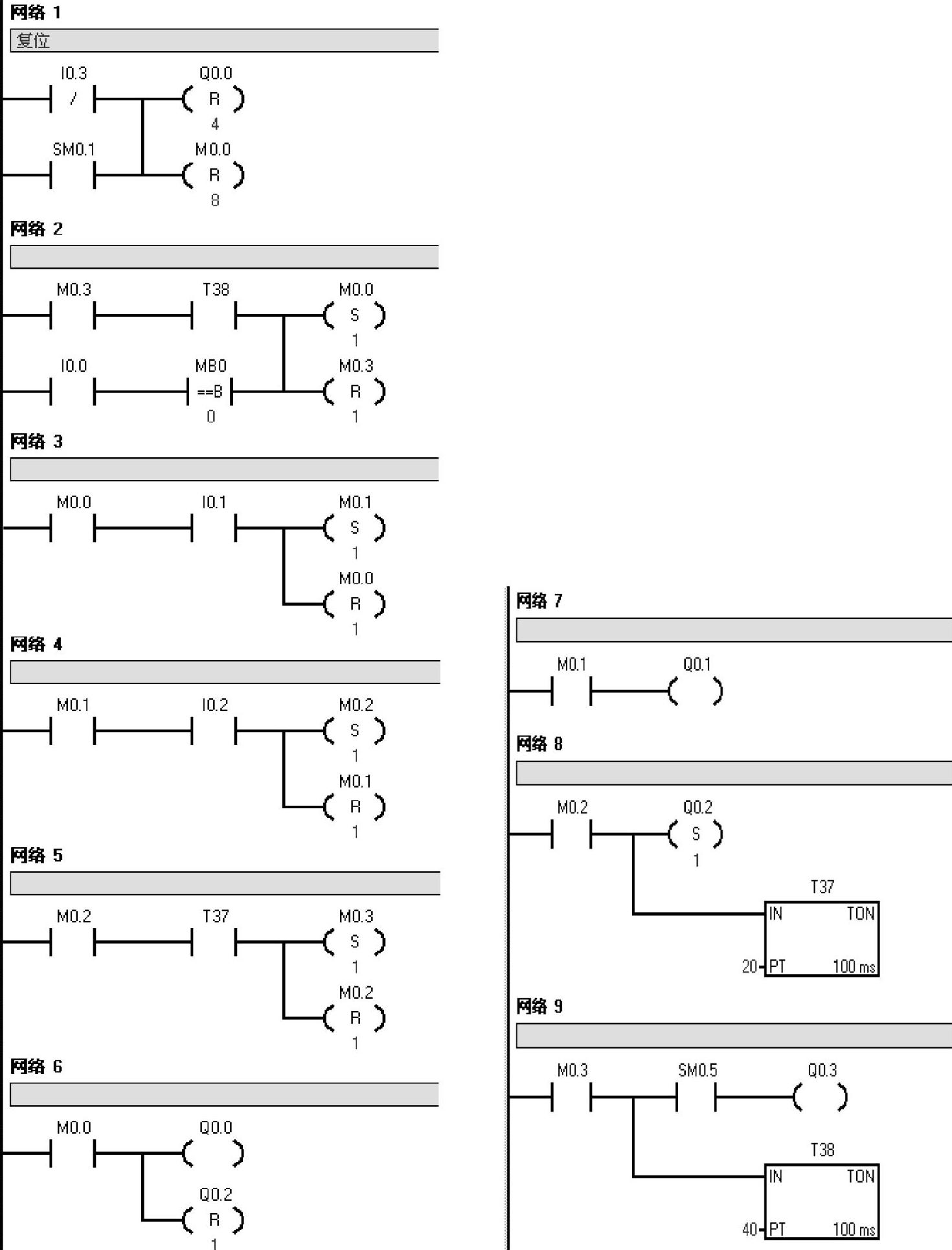
图5-39 程序
【例5-9】用置位/复位指令编写例5-3的程序。
【解】
梯形图如图5-40所示。
至此,同一个顺序控制的问题使用了基本指令、顺控指令(有的PLC称为步进梯形图指令)、复位/置位指令和功能指令四种解决方案编写程序。四种解决方案的编程都有各自的几乎固定的步骤,但有一步是相同的,那就是首先都要画功能图。四种解决方案没有好坏之分,读者可以根据自己的喜好选用。在下一节的“项目实施”中,读者可以模仿以上四种方法中的一种来编写程序。
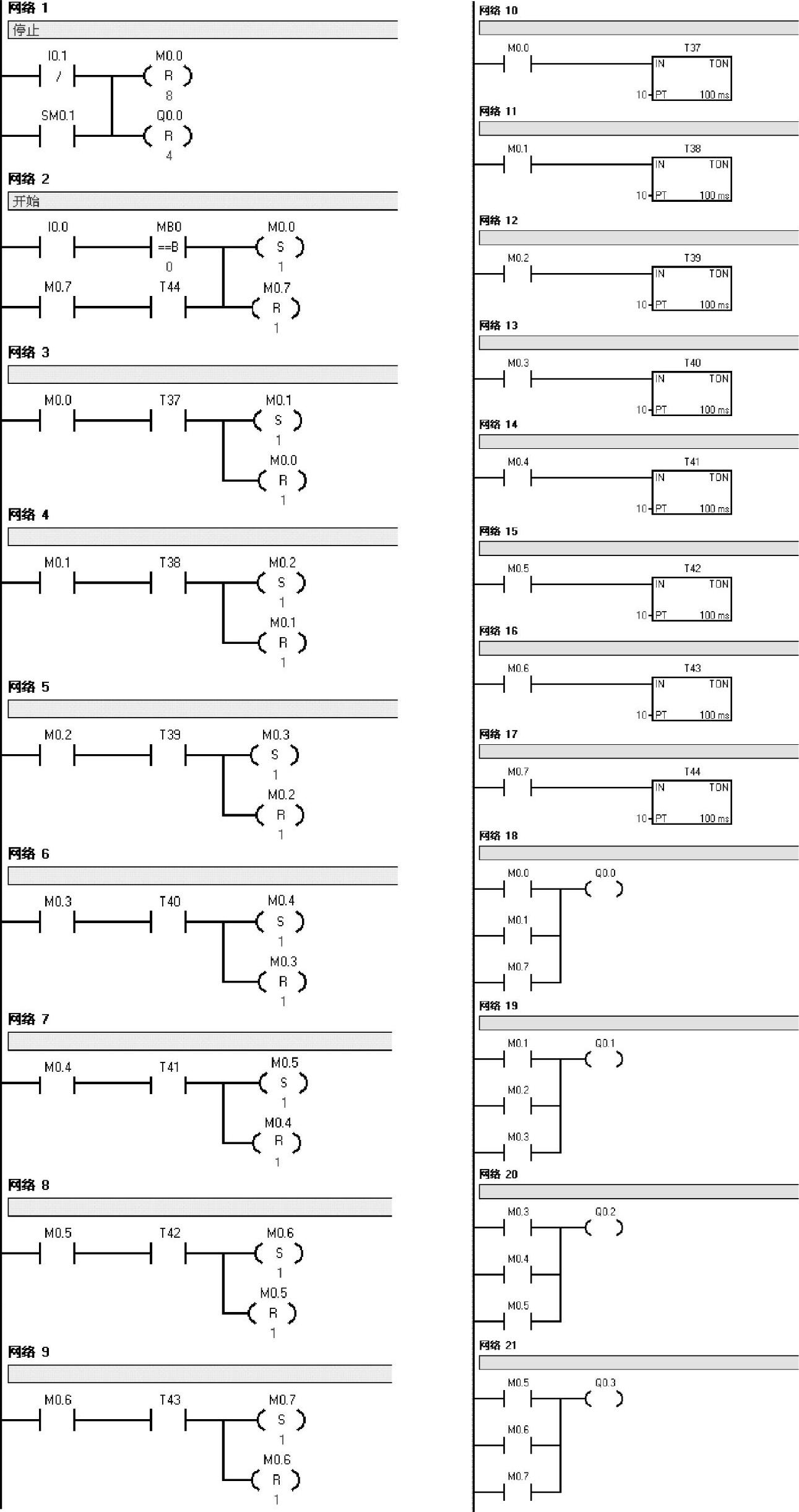
图5-40 梯形图
以下再举2个例子说明逻辑控制的编程方法。
【例5-10】液体混合装置示意图如图5-41所示,上限位、下限位和中限位液位传感器被液体淹没时为1状态,电磁阀A、B、C的线圈通电时,阀门打开,电磁阀A、B、C的线圈断电时,阀门关闭。在初始状态时容器是空的,各阀门均关闭,各传感器均为0状态。按下起动按钮后,打开电磁阀A,液体A流入容器,中限位开关变为ON时,关闭A,打开阀B,液体B流入容器。液面上升到上限位开关,关闭阀门B,电动机M开始运行,搅拌液体,30s后停止搅动,打开电磁阀C,放出混合液体,当液面下降到下限位开关之后,过3s,容器放空,关闭电磁阀C,打开电磁阀A,又开始下一个周期的操作。按停止按钮,当前工作周期结束后,才能停止工作,按急停按钮可立即停止工作。请绘制功能图,设计梯形图。
【解】
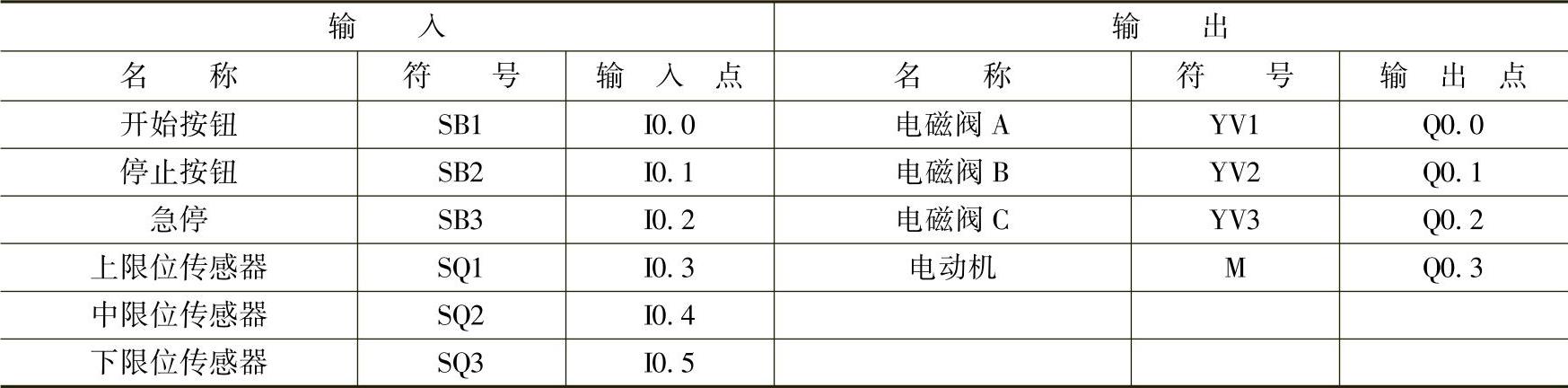
液体混合的PLC的I/O分配见表5-1。
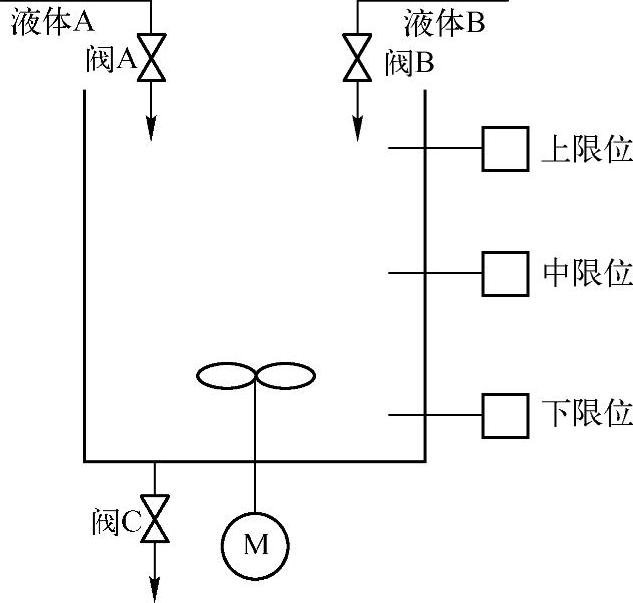
图5-41 液体混合装置
表5-1 PLC的I/O分配表
电气系统的原理图如图5-42所示,功能图如图5-43所示,梯形图如图5-44所示。
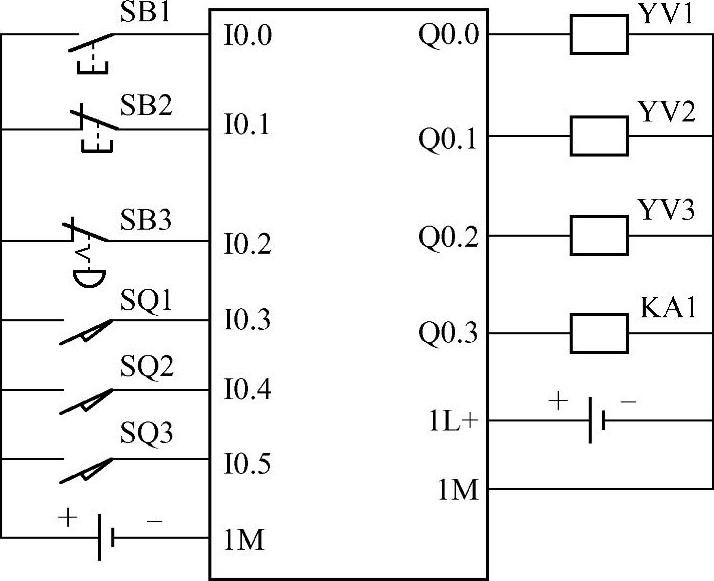
图5-42 原理图
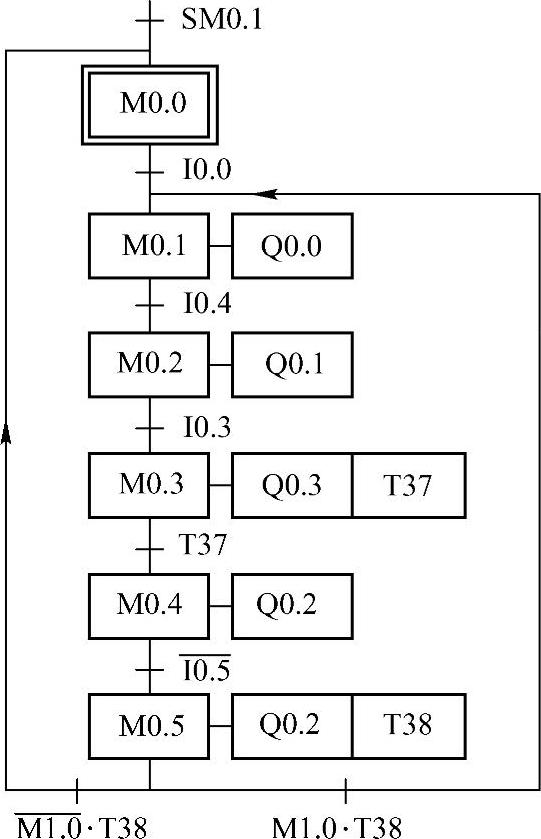
图5-43 功能图
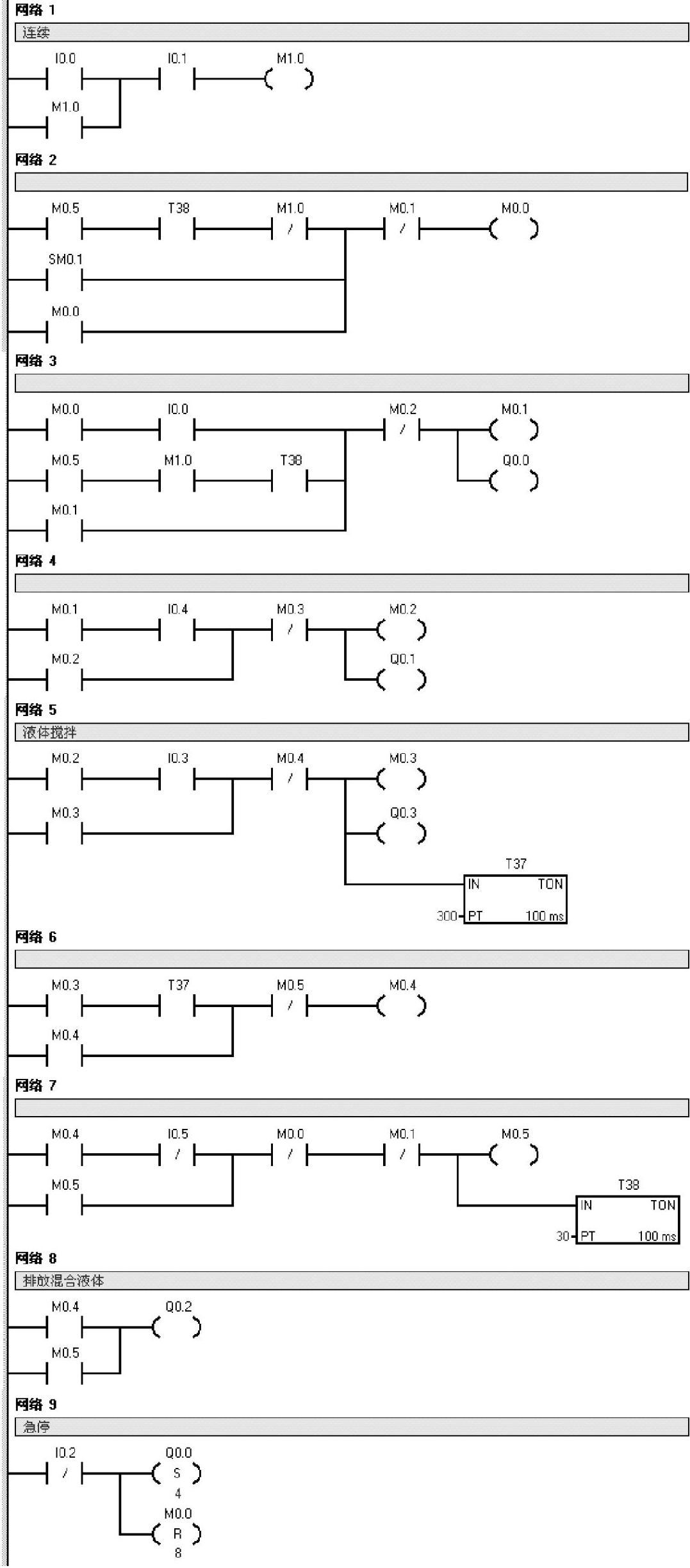
图5-44 梯形图
【例5-11】某钻床用2个钻头同时钻2个孔,开始自动运行之前,2个钻头在最上面,上限位开关I0.3和I0.5为ON。操作人员放好工件后,按起动按钮I0.0。工件被夹紧后,2个钻头同时开始工作,钻到由限位开关I0.2和I0.4设定的深度时分别上行,回到由限位开关I0.3和I0.5设定的起始位置时,分别停止上行。当2个钻头都到起始位置后,工件松开,工件松开后,加工结束,系统回到初始状态。钻床的加工示意图如图5-45所示,请设计功能图和梯形图。
【解】
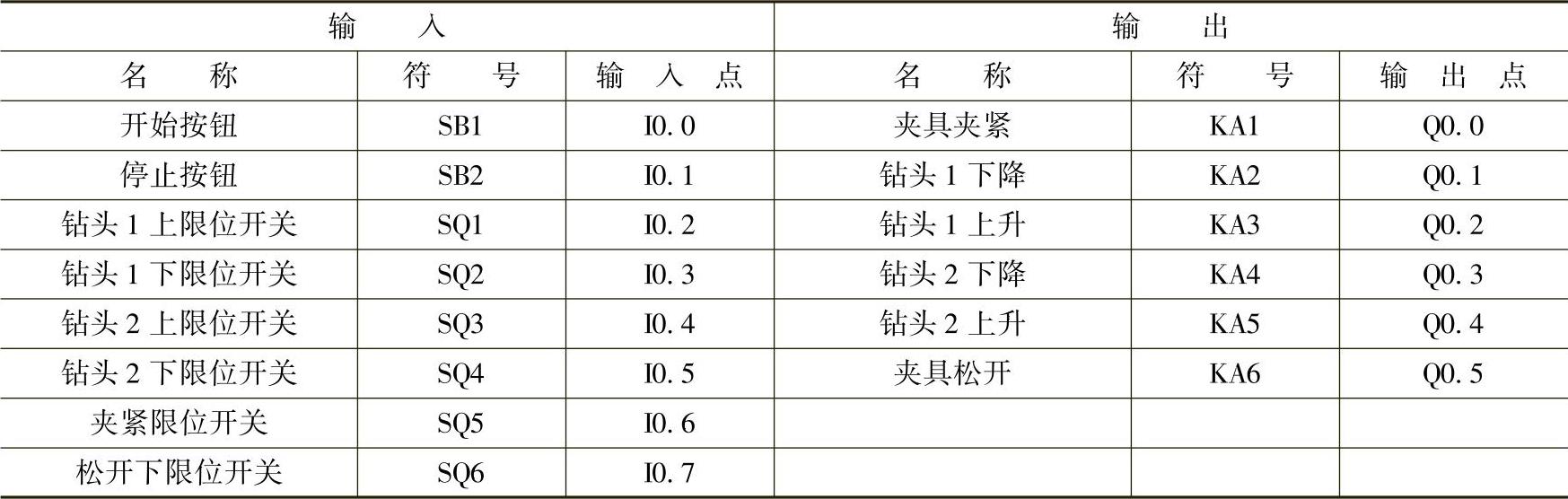
钻床的PLC的I/O分配见表5-2。
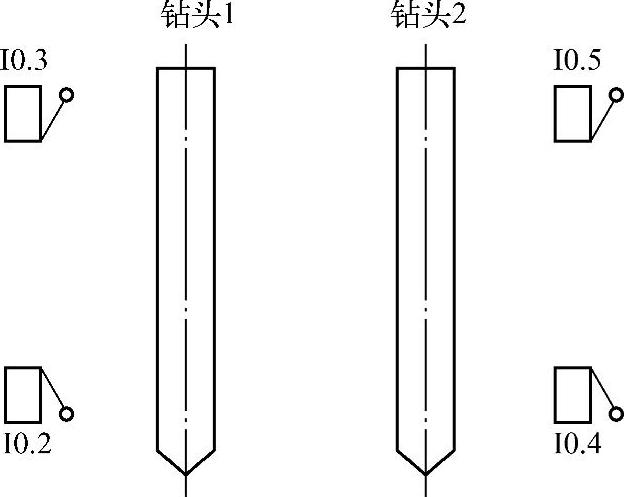
图5-45 钻床加工示意图
表5-2 PLC的I/O分配表
电气系统的原理图如图5-46所示,功能图如图5-47所示,梯形图如图5-48所示。
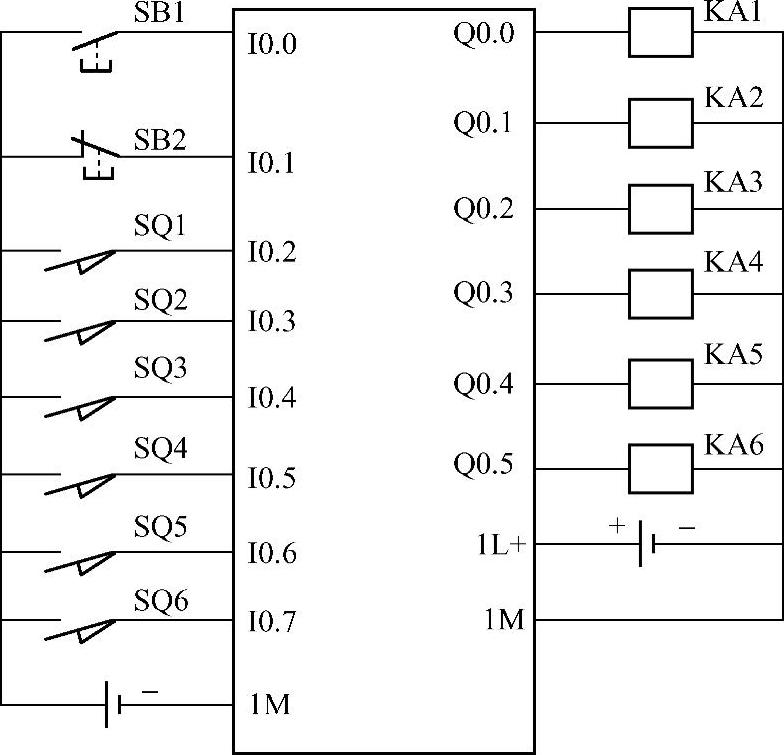
图5-46 原理图
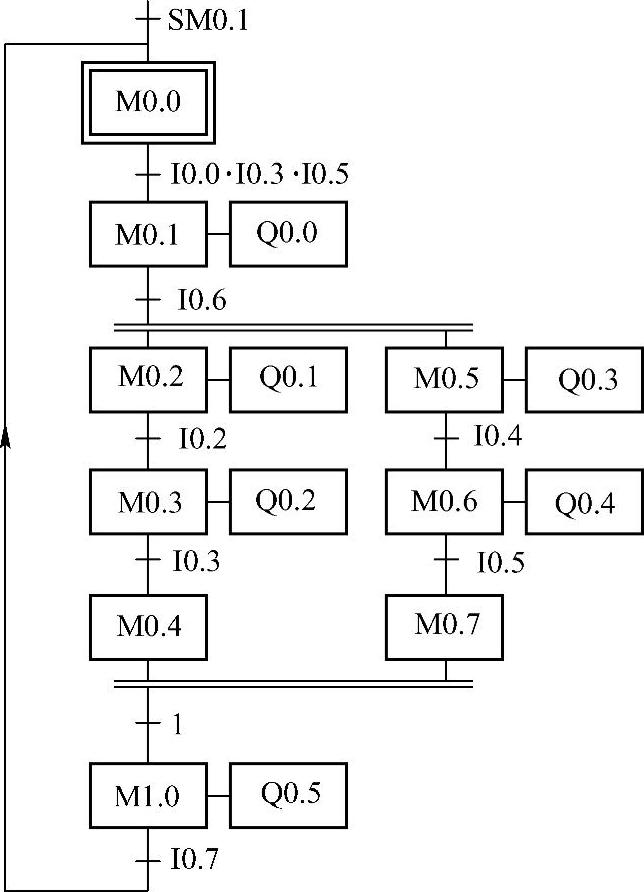
图5-47 功能图
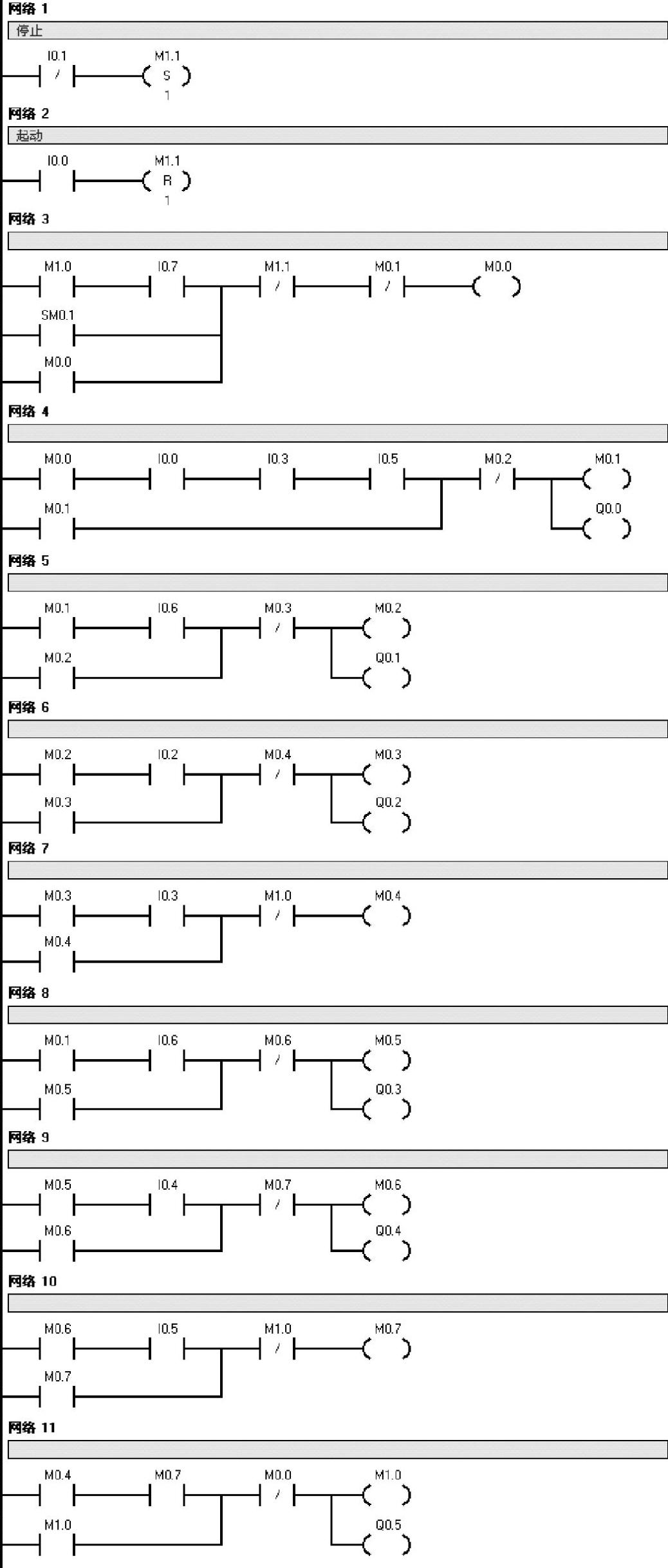
图5-48 梯形图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。