



焊缝超声无损检测方法按照GB/T11345—2013《焊缝无损检测 超声检测技术、检测等级和评定》进行。
1.人员
检测人员应取得超声检测相关工业门类的资格等级证书,并对其进行职位专业培训和操作授权。从事焊缝检测人员应掌握焊缝超声检测通用知识,具有足够的焊缝超声检测经验,并掌握一定的材料和焊接基础知识。
2.设备
(1)仪器性能测试(性能验证) 超声检测仪应定期进行性能测试。仪器性能测试应按JB/T9712推荐的方法进行。除另有约定外,超声检测仪应符合下列要求。
1)温度的稳定性:环境温度变化5℃,信号的幅度变化不大于全屏高度的±2%,位置变化不大于全屏宽度的±1%。
2)显示的稳定性:频率增加约1Hz,信号幅度变化不大于全屏高度的±2%,信号位置变化不大于全屏宽度的±1%。
3)水平线性的偏差不大于全屏宽度的±2%。
4)垂直线性的测试值与理论值的偏差不大于±3%。
5)出具仪器性能测试报告的机构应是具有资质的,报告的有效期不宜大于12个月。
(2)系统性能测试 至少在每次检测前,应按JB/T9214推荐的方法,对超声检测系统工作性能进行测试。除另有约定外,系统性能应符合下列要求。
1)用于缺欠定位的斜探头入射点的测试值与标称值的偏差不大于±1mm。
2)用于缺欠定位的斜探头折射角的测试值与标称值的偏差不大于±2°。
3)灵敏度余量、分辨力和盲区,视实际应用需要而定。
4)系统性能的测试项目、时机、周期及其性能要求,应在书面检测工艺规程中予以详细规定。
3.探头参数
(1)检测频率 检测频率应为2~5MHz,同时应遵照验收等级要求选择合适的频率。当被检对象的衰减系数高于材料的平均衰减系数时,可选择1MHz左右的检测频率。

图7-72 纵向曲面磨弧探头入射点变化的测定
1—探头主声束轴线 2—修整后的探头入射点 3—修整前的探头入射点
(2)折射角 当检测采用横波且所用技术需要超声从底面反射时,应注意保证声束与底面反射面法线的夹角在35°~70°。当使用多个斜探头进行检测时,其中一个探头应符合上述要求,且应保证一个探头的声束尽可能与焊缝熔合面垂直。多个探头间的折射角度差应不小于10°。
当探测面为曲面时,工件中横波实际折射角和底面反射角可由焊缝截面图确定。
1)纵向曲面磨弧探头。探头的入射角度(αd)可从已测量的声束折射角(α)与一条线之间来计算,一条线可从探头入射点与平行于入射声束来得到,并将线在探头一侧做记号,如图7-72所示。
入射角度可从下式来得出:
式中 cd——探头斜楔纵波声速(通常有机玻璃纵波声速为2730m/s);
ct——被检工件横波声速(一般钢横波声速为3255m/s±15m/s)。
修整后的探头入射点将会沿着标记线移动,并且它的新位置可以用手工方法直接在探头外壳上测定。
探头折射角可通过满足要求的横孔最大回波来测定,也可在工件、参考试块或者是在比例图样上直接测定,如图7-73所示。
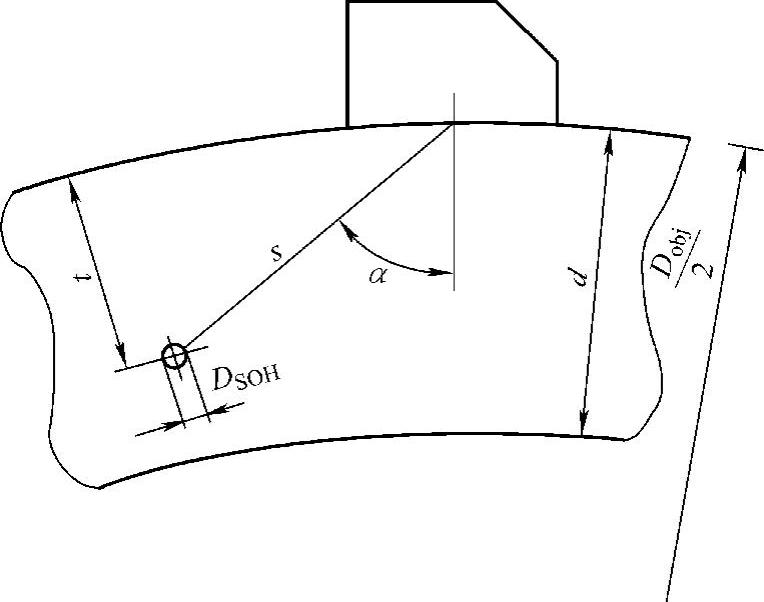
图7-73 纵向磨弧探头折射角α的测定
折射角可以用手工方法在参考试块上测量的声程长度,使用下式来计算:

校准所用表面的曲率半径与被检工件相比,误差应控制在±10%之内。
2)横向曲面磨弧探头。横向曲面磨弧探头修整后,探头入射点位置的变化量(Δx)如图7-74所示,其计算公式为
Δx=gtan(αd)
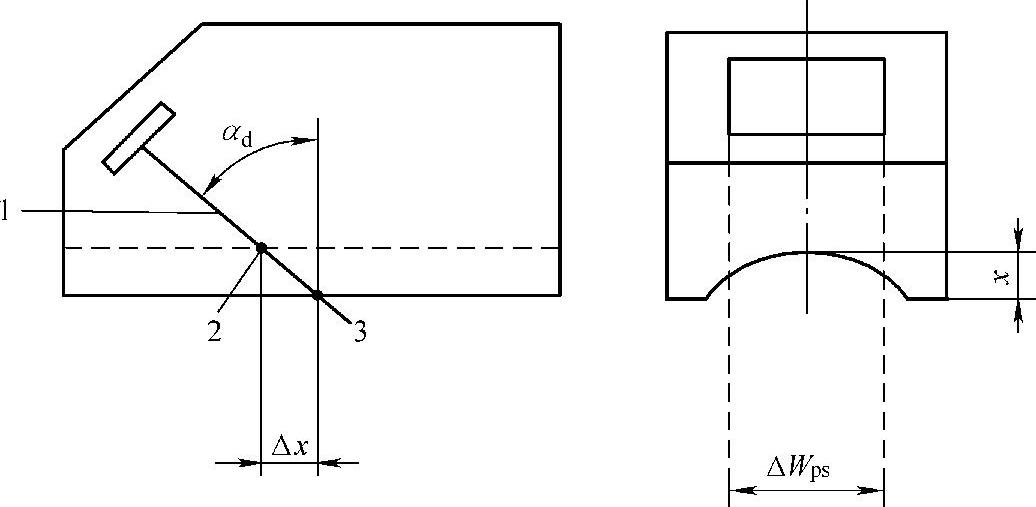
图7-74 横向曲面磨弧探头入射点变化的测定
1—探头主声束轴线 2—修整后的探头入射点 3—修整前的探头入射点
有机玻璃斜楔(cd=2730m/s),非合金钢被检件(ct=3255m/s),探头入射点位置的变化量(Δx),三个最常用的声束角度和修正深度(g)可从图7-75中读出。
修正时不能改变声束角度。如果声束角度变化是未知的,或者修正深度沿着探头长度的有任何变化时,应在块合适的修整后的参考试块上利用横孔来测定。声束角度α由以下决定:①在比例图样上,在横孔与探头入射点之间画一条直线;②按图7-76和下式来进行计算:


图7-75 探头入射点的变化量Δx及修正深度

图7-76 横孔测定声束折射角度
3)折射角变化规律。如图7-77所示,它是曲面工件声束实际折射角度变化诺模图。
4)从外圆面扫查时的声程。
①对于全跨度,总声程st用图7-78和下式计算:

②对于半跨度,总声程st用图7-79和下式计算:


图7-77 曲面工件声束实际折射角度变化诺模图

图7-78 从外圆面扫查时的全跨距声程距离
s—声程 Dobj—被检件的外径或扫查面的曲率 t—反射体的深度 d—厚度

图7-79 从外圆面扫查时的半跨距声程距离
st—总声程 Dobj—被检件的外径或扫查面的曲率 t—反射体的深度 d—厚度
5)从内圆面扫查时的声程。
①对于全跨度,总声程st用图7-80和下式计算:


图7-80 从内圆面扫查时的全跨距声程距离
s—声程 Dobj—被检件的外径或扫查面的曲率 t—反射体的深度 d—厚度
②对于半跨度,总声程st用图7-81和下式计算:


图7-81 从内圆面扫查时的半跨距声程距离
st—总声程 Dobj—被检件的外径或扫查面的曲率 t—反射体的深度 d—厚度
(3)晶片尺寸 晶片尺寸选择应与频率和声程有关。在给定频率下,探头晶片尺寸越小,近场长度和宽度就越小,远场中声束扩散角就越大。晶片直径为6~12mm(或等效面积的矩形晶片)的小探头,最适合短声程检测。对于长声程检测,比如单晶直探头检测大于100mm或斜探头检测大于200mm的声程,选择直径为12~24mm(或等效面积的矩形晶片)的晶片更为合适。
(4)曲面扫查时的探头匹配 检测面与探头靴底面之间的间隙g应不大于0.5mm。对于圆柱面或球面,上述要求可由下式检查:

式中 a——探头接触面宽度,环缝检测时为探头宽度,纵缝检测为探头长度(见图7-82);
D——工件直径。
如果间隙g值大于0.5mm,则探头靴底面应修磨至与曲面吻合,灵敏度和时基范围也应做相应调整。
(5)耦合剂 耦合剂应选用适当的液体或糊状物,应具有良好透声性和适宜流动性,不应对检测对象和检测人员有损伤作用,同时应便于检验后清理。典型的耦合剂为水、全损耗系统用油、甘油和糨糊,耦合剂中可加入适当的润湿剂或活性剂以改善耦合性能。时基范围调节、灵敏度设定和工件检测时应采用相同耦合剂。
4.检测区域

图7-82 探头接触面宽度
检测区域(见图7-83)是指焊缝和焊缝两侧至少10mm宽母材或热影响区宽度(取两者较大值)的内部区域。

图7-83 扫查纵向显示时检测区域示意图
1—位置1 2—位置2 3一位置3 a—检测区域宽度 b—探头移动区宽度
5.探头移动区
1)探头移动区应足够宽,以保证声束能覆盖整个检测区域。增加探测面,比如在焊接接头双面进行扫查,可缩短探头移动区宽度。
2)探头移动区表面应平滑,无焊接飞溅、铁屑、油垢及其他外部杂质。探头移动区表面的平整度,不应引起探头和工件的接触间隙超过0.5mm。如果间隙超标,应修整探头移动区表面。当焊缝表面局部变形导致探头与焊缝的间隙大于1mm,可在受影响位置用其他角度探头进行补充扫查。如果该扫查能弥补未扫查到的检测区域,此局部变形是允许的。
3)探头移动区和声束反射而应允许无干扰的耦合剂和反射物。
6.母材检测
除非能证实(比如制造过程的预检)母材金属高衰减或缺欠的存在不影响横波检测,否则探头移动区的母材金属应在焊前或焊后进行纵波检测。
存在缺欠的母材部位,应对其是否影响横波检测效果进行评定。如有影响,调整焊缝超声检测技术,严重影响声束覆盖整个检测区域时则应考虑更换其他检测方法(比如射线检测)。
7.时基线和灵敏度设定
(1)概述 使用脉冲波技术,应在示波屏上设置超声时基线。一束透射声束的声程距离、深度、水平距离或者扣除前沿的水平距离的坐标,如图7-84所示。除非另有注明,下述所提及设定时基线工艺是指声束传播的声程距离(一个回波等于两次的传播路径)。

图7-84 声束坐标示意图
1—反射体 2—入射点
时基线的设定应使用两个已知时间或距离的参考回波进行。根据预定的校准值,能得知各自的声程、深度、水平距离,或者扣除前沿的水平距离。该技术能够确保通过延时块(如探头楔块)的声束传播自动校准。假设参考试块声速可知,在该情况下设备的电子时基线通过一个回波就可以校准。在时基线范围内的两参考回波之间距离可等同于实际距离。运用时基线扫描控制旋钮将最高回波的波的前沿对应于屏幕上预定的水平刻度值。准确的校准可用一个检查信号来验证,检查信号不一定与之前校准设置的信号显示在示波屏的同一位置,但能显示在示波屏适当的位置。
(2)参考试块和参考反射体 对于铁素体钢的检测,建议使用GB/T19799.1中规定的1号校准试块或GB/T19799.2中规定的2号校准试块。只要已知参考试块或被检工件本身的探测面至反射体的声程距离,就可以用其来校准时基线。参考试块与被检工件的声速误差应在±5%之内,否则应进行修正。
(3)直探头调节技术
1)单反射体调节。参考试块的厚度不得超过时基线设定范围。合适的底面回波,可从2号校准试块的12.5mm处或从1号校准试块厚度为25mm或100mm处得到。也可选择已知厚度的被检工件,试块与工件应有相同的平表面或曲面,且试块与工件的声速应相同。
2)多反射体调节。要求参考试块(或组合试块)应有不同声程的两个反射体(如横孔)。重复地不断移动探头位置,找到每个反射体各自的最高回波;再通过调节时基线扫描控制旋钮,将相邻两个反射体的回波设置到准确的位置来进行时基线校准。
(4)斜探头调节技术
1)试块圆弧面调节。用1号校准试块或2号校准试块的圆弧面来设定时基线。
2)纵波探头调节转换。横波探头时基线可通过纵波探头在1号校准试块的91mm厚度处设置相对于在钢中50mm的横波声程。完成时基线设定之后,通过检测时所用的探头和已知声程距离的反射体,仅用零点校准旋钮就可以来进行时基线的设置。
3)参考试块调节。这与针对直探头的调节原理相似,然而要达到足够精确,就必须找到最高回波,在试块表面标出声束入射点,然后用手工方法测量反射体与相应的标记之间的距离。对所有后面的时基线校准,探头应在这些标记重新定位。
(5)斜探头时基线的设置
1)平面。平面工件检测时,深度和水平距离主要取决于给定的声束角度,可参照比例图或以下公式:
深度(t):t=scosαt
水平距离(a):a=ssinαt
扣除前沿的水平距离(a′): a′=ssinαt-x
2)曲面。上面阐述的时基线设置的原理在这里仍适用,但深度和水平距离不再是线性的。非线性标度比例的建立,可在声程距离比例图上通过一系列的位置来绘出,或由适当的公式计算出,或可从曲面试块上得到一系列反射体的最高回波来确定标度,中间值可通过插值法获得,如图7-85所示。
(6)灵敏度设定和回波高度评定
1)在校准完时基线之后,超声设备的灵敏度(增益调节)应按以下任一技术进行设定:①单反射体技术:当评定的回波与参考反射体回波的声程距离相同,即可利用单个参考反射体作为参考;②距离-波幅曲线(DAC)技术:DAC曲线是通过得到参考试块上一系列不同声程的相同反射体(如横孔或平底孔)回波来绘制的;③DGS技术:该技术是使用一系列理论上与声程、增益、与声束轴线垂直的平底孔尺寸相关的参数,导出距离-增益-尺寸曲线。
每次检测前应设定时基线和灵敏度,并考虑温度的影响。时基线和灵敏度设定时的温度与焊缝检测时的温度之差不应超过15℃。
检测过程中至少每4h或检测结束时,应对时基线和灵敏度设定进行校验。当系统参数发生变化或等同设定变化受到质疑时,也应重新校验。

图7-85 反射体回波位置的水平距离(去除前沿长度)和深度的时基线
注:at=51°,smax=100mm。
如果在检测过程中发现偏离,应按表7-56要求进行修正。
表7-56 灵敏度和时基线修正

2)设定参考灵敏度。应选用下列任一技术设定参考灵敏度。
①以直径为3mm横孔作为基准反射体,制作距离-波幅曲线(DAC)。
②以规定尺寸的平底孔(见表7-57和表7-58)作为基准反射体,制作纵波/横波距离-增益-尺寸曲线(DGS)。
表7-57 技术②的验收等级2和验收等级3的参考等级(斜射波束横波检测)

注:DDSR为平底孔直径。
表7-58 技术②的验收等级2和验收等级3的参考等级(直射波束纵波检测)(https://www.xing528.com)

注:DDSR为平底孔直径。
③应以宽度和深度均为1mm的矩形槽作为基准反射体。该技术仅应用于斜探头(折射角≥70°)检测厚度为8~15mm的焊缝。
④串列技术。以直径为6mm平底孔(所有厚度)作为基准反射体,垂直于探头移动区。该技术仅应用于斜探头(折射角为45°)检测厚度t>15mm的焊缝。横孔和矩形槽的长度应大于用20dB法测得的声束宽度。
串列检测使用两个折射角为45°的斜探头,一个探头用于发射超声波,一个探头用于接收超声波。
当焊缝厚度大于160mm时,可选用不同晶片尺寸的探头,以确保在检验区域内得到相同截面尺寸的声束。
受检测对象几何条件的限制,可使用折射角不为45°的斜探头,但要避免产生波形转换。
两个斜探头应置于同一直线上,以保证前一探头发射的声束经底面反射后能斜入射检测区域的某一显示,该显示的反射声束能被后一探头接收。
斜探头间距(y)、声束轴线交叉点检测深度(tm)和检测区域高度(tz)之间的关系如图7-86所示。
当检测两平行端面的工件时,探头间距由下式决定:
y=2tanα(d-tm)如果α=45°,则y=2(d-tm)。

图7-86 串列检测基本原理
1—探头1 2—探头2 3—检验区域 a—水平距离 d—材料厚度
tm—检测深度 y—探头间距 tz—检测区域高度
可选用下列任一方法进行扫查:a.两探头沿工件表面以固定探头间距移动,此方法一次只能检测一定深度的检测区域,需要调整探头间距,以覆盖整个深度截面的检测区域;b.两探头同时移动,保持它们声轴平面交叉距离之和不变(声轴要垂直焊缝轴),从而在一个连续运动中扫查整个厚度范围。
划分相等的检验区域以确保灵敏度不降低。检验区域高度的计算:检验区边缘的灵敏度与声轴交叉处的灵敏度相比不低于6dB,如图7-87所示。
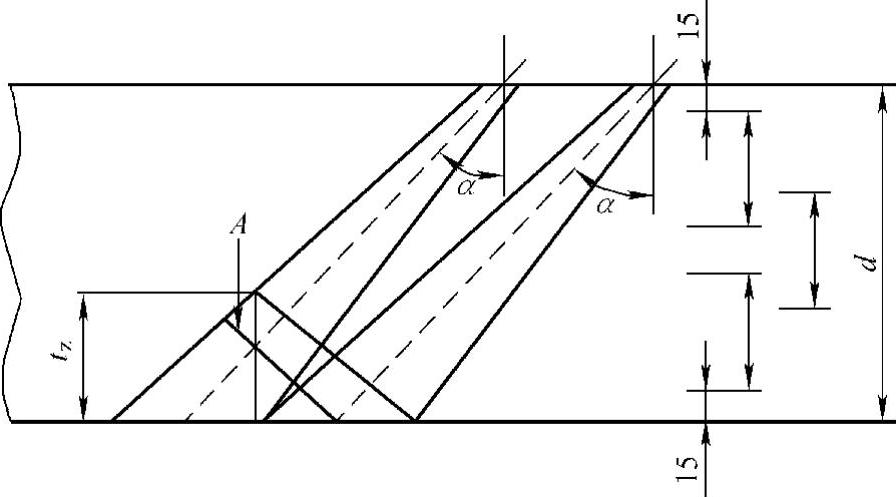
图7-87 检测区域
A—声束有效直径 d一材料厚度 tz—检测区域高度
检测区域高度(tz)可用参考试块上不同深度反射体来测定,或用接近对面最大声程结合声束有效直径来计算:

式中 Deff——晶片有效直径。检测区域数量按下式计算:

(7)传输修正 当使用对比试块建立参考等级时,应在工件和试块有代表性的位置测量声能传输损失差值。
1)如差值小于等于2dB,无须修正。
2)如差值大于2dB且小于12dB,应进行补偿。
3)如差值大于等于12dB,应考虑原因,如适用应进一步修整探头移动区。
当检测对象存在较大的声能传输损失差值,但未发现明显原因时,应测量检测对象不同位置的声能传输损失,并应采取修正措施。
(8)信噪比 焊缝检测过程中,噪声电平,不包括表面伪显示,应至少保持在评定等级12dB以下。可根据技术协议放宽信噪比要求。
8.检测等级
焊接接头的质量要求,主要与材料、焊接工艺和服役状况有关。依据质量要求,规定了四个检测等级(A、B、C和D级)。
从检测等级A到检测等级C,增加检测覆盖范围(如增加扫查次数和探头移动区等),提高缺欠检出率。检测等级D适用于特殊应用,在制定书面检测工艺规程时应考虑本标准的通用要求。通常,检测等级与焊缝质量等级有关。相应检测等级可由焊缝检测标准、产品标准或其他文件规定。
1)板-板和管-管对接接头的检测等级如图7-88和表7-59所示。

图7-88 板-板和管-管对接接头典型结构
1—位置1 2—位置2 3—位置3 4—位置4
A、B、C、D、E、F、G、H、W、X、Y、Z—探头位置
b—与跨距(p)相关的探头移动区宽度(SZW) p—全跨距
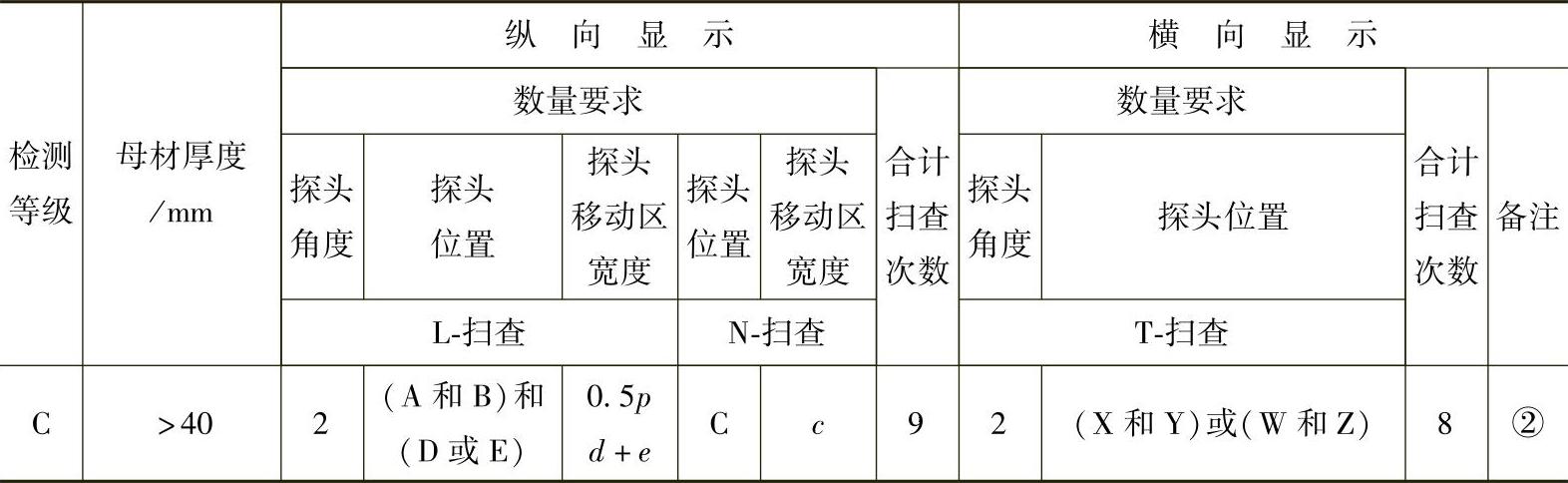
2)T形接头的检测等级如图7-89和表7-60所示。
表7-59 板-板和管-管对接接头检测等级

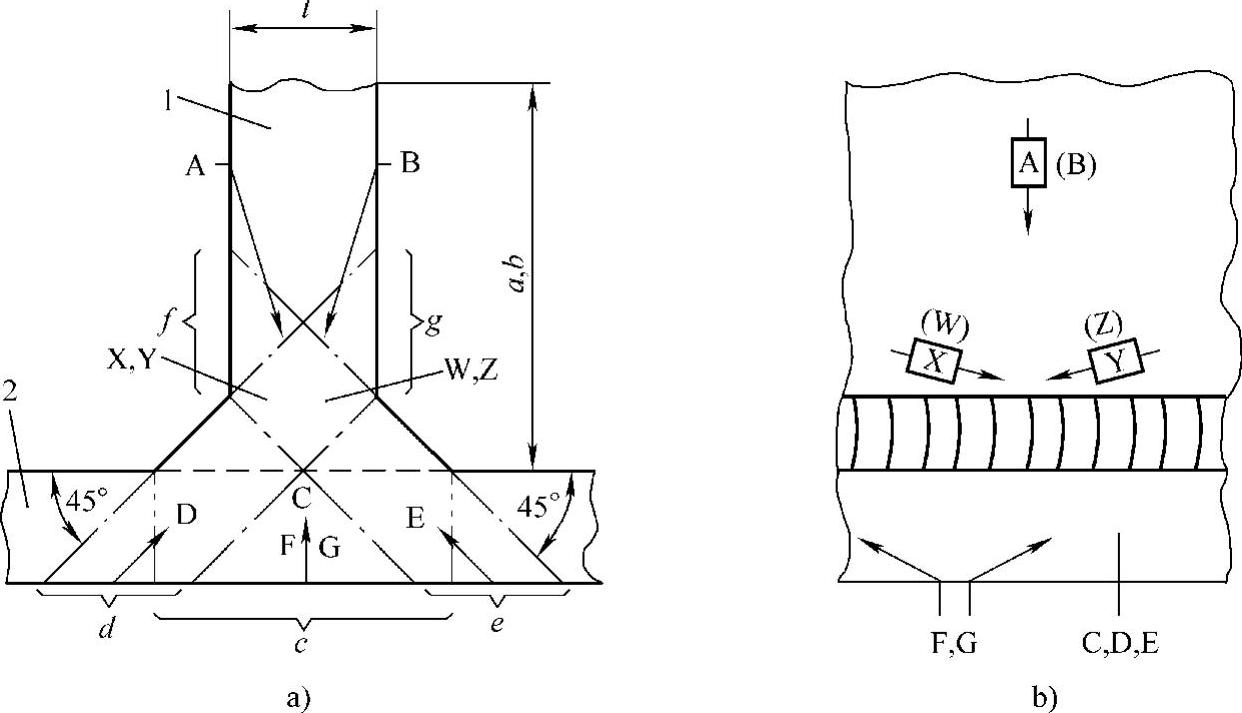
图7-89 T形接头典型结构
注:L-扫查—使用斜探头扫查纵向显示;N-扫查—使用直探头扫查;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 可由检测合同限制为单面一次扫查。
② 附加串列检测技术由检测合同特别规定。
③ 仅由检测合同特别规定。
④ 焊缝表面应符合相关要求。焊缝表面可要求磨平,单面环焊缝只磨外表面即可。
⑤ 如果只进行单面扫查,应选用两个角度的探头。
⑥ 在15mm<t≤25mm范围内,如果选用低于3MHz的频率,1个角度的探头扫查即可。
a)端视 b)俯视
1—部件1 2—部件2 A、B、C、D、E、F、G、W、X、Y、Z—探头位置
a、b、c、d、e、f、g—探头移动区宽度 t—厚度
表7-60 T形接头检测分级

注:L-扫查—使用斜探头扫查纵向显示;N-扫查—使用直探头扫查;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 不适用。
② 执行仅在检测合同特别规定时。
③ 如果位置C不能扫查,可从位置A或位置B用串列检测技术代替。
3)插入式管座角接头的检测等级如图7-90和表7-61所示。

图7-90 插入式管座角接头典型结构
a)横截面 b)俯视
1—部件1(筒体/平板) 2—部件2(接管) A、B、C、D、E、F、U、V、W、X、Y、Z—探头位置 a、b、c、d、e—探头移动区宽度 t—厚度
表7-61 插入式管座角接头检测分级

(续)
注:L-扫查—使用斜探头扫查纵向显示;N-扫查—使用直探头扫查;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 不适用。
② 仅在检测合同特别规定时执行。
4)L型接头的检测等级如图7-91和表7-62所示。

图7-91 L形接头典型结构
a)横截面 b)俯视
1—部件1(接件) 2—部件2(主件) A、B、C、D、E、F、G、H、X、Y—探头位置a、b、c—探头移动区宽度 t—厚度
表7-62 L形接头检测分级

(续)

注:L-扫查—使用斜探头扫查纵向显示;N-扫查—使用直探头扫查;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 不适用。
② 仅在检测合同特别规定时执行。
③ 焊缝表面应符合相关要求。焊缝表面可要求磨平。
5)骑坐式管座角接头的检测等级如图7-92和表7-63所示。

图7-92 骑坐式管座角接头典型结构
a)横截面 b)俯视
1—部件1(支管) 2—部件2(主管) A、B、C、D、X、Y—探头位置
a、b、c、d、x—探头移动区宽度 t—厚度
表7-63 骑坐式管座角接头检测分级

注:L-扫查—使用斜探头扫查纵向显示;N-扫查—使用直探头扫查;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 不适用。
② 仅在检测合同特别规定时执行。
③ 焊缝表面应符合相关要求。焊缝表面可要求磨平。
6)十字接头的检测等级如图7-93和表7-64所示。

图7-93 十字接头典型结构
a)端视 b)侧视
1—部件1(支管) 2—部件2 3—部件3 A、B、C、D、E、F、G、H、W、W1、W2、Y、Y1、Y2、Z、Z1、Z2—探头位置 a、b、c、d、e、f、g、h—探头移动区宽度 t—厚度
表7-64 十字接头检测分级

注:L-扫查—使用斜探头扫查纵向显示;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 不适用。
② 仅在检测合同特别规定时执行。
③ 若要求更高的灵敏度等级,应使用串列检测技术。
④ 若要求更高的灵敏度等级,应使用串列检测技术。在此情况下,应略去位置E,F,G,H的扫查。
7)管座相贯角接头的检测等级如图7-94和表7-65所示。

图7-94 管座相贯角接头的典型结构
1—部件1(主管) 2—部件2(支管) A、B、C、D、E、F、G、H、X、Y—探头位置
d、e、f、g、h—探头移动区宽度
表7-65 管座相贯角接头检测分级

注:L-扫查—使用斜探头扫查纵向显示;N-扫查—使用直探头扫查;T-扫查—使用斜探头扫查横向显示;p—全跨距。
① 相贯接头检测通常应使用检测等级D,由检测合同特别规定。
② 不适用。
③ 如果部件1内孔不可达(位置D和E),则检测等级B不适用。
9.显示位置
所有显示的位置,应参考一个坐标系定义,如图7-95所示。

图7-95 显示位置的坐标
应选择检测面的某一点作为测量原点。
当从多个面进行检测时,每个检测面都应确定参考点。在这种情况下,应当建立所有参考点之间的位置关系,以便所有显示的绝对位置可以从指定的参考点确定。
环形焊缝可在装配前确定内外圈的参考点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。